【人工智能学习-AI-MIT公开课第 19. 架构:GPS、SOAR、包容架构】
为了应对大学院考试,我们来学习相关人工智能相关知识,并且是基于相关课程。使用课程为MIT的公开课。通过学习,也算是做笔记,让自己更理解些。知识一点点记录吧,最后应对考试,打下基础。
人工智能学习-AI-MIT公开课第 19. 架构:GPS、SOAR、包容架构
1-前言
为了应对大学院考试,我们来学习相关人工智能相关知识,并且是基于相关课程。使用课程为MIT的公开课。
通过学习,也算是做笔记,让自己更理解些。
2-课程链接
3-具体内容解释说明
一、这节在 AI 里到底在讲什么?
👉 不是现代深度学习
👉 是 “智能体如何组织思考与行动” 的整体设计
也叫:AI Architecture(知能アーキテクチャ)
核心问题只有一句话:
智能体如何从「目标」到「行动」?
二、三个架构逐个讲(入试标准理解)
① GPS(General Problem Solver)
是什么?
最早的通用问题解决架构(符号 AI)
核心思想
-
把问题表示成:
- 初始状态
- 目标状态
- 操作(规则)
-
通过 搜索,一步步接近目标
👉 本质:问题 = 状态空间搜索
特点(入试用)
- ✅ 结构清晰、逻辑性强
- ❌ 不适合复杂、实时、动态环境
- ❌ 对环境建模要求高
和你熟的东西的关系
- A*、経路探索、状态图
👉 全是 GPS 思想的直接继承
② SOAR
是什么?
把“问题解决 + 学习”统一起来的架构
核心思想
-
当系统「卡住」时:
- 产生子问题
- 解决后把经验 存为规则
-
下次遇到类似问题:
- 直接用规则,不再搜索
👉 边解决问题,边学习
特点(入试重点)
- ✅ 有长期记忆
- ✅ 会“变聪明”
- ❌ 架构复杂
- ❌ 仍偏符号处理
入试常问
- 哪个架构具有学习能力? → SOAR
- GPS 和 SOAR 最大区别? → SOAR 会学习
③ 包容架构(Subsumption Architecture)
是什么?
行为优先的机器人架构(反传统 AI)
核心思想
-
不建完整世界模型
-
多层行为模块:
- 避障
- 追踪
- 探索
-
高层行为可以“覆盖”低层行为
👉 行为 > 规划
特点(超常考)
- ✅ 反应快
- ✅ 适合实时机器人
- ❌ 没有全局最优规划
- ❌ 行为难以解释
入试关键词
- 实时性
- 反应型
- 去中心化
- 行为驱动
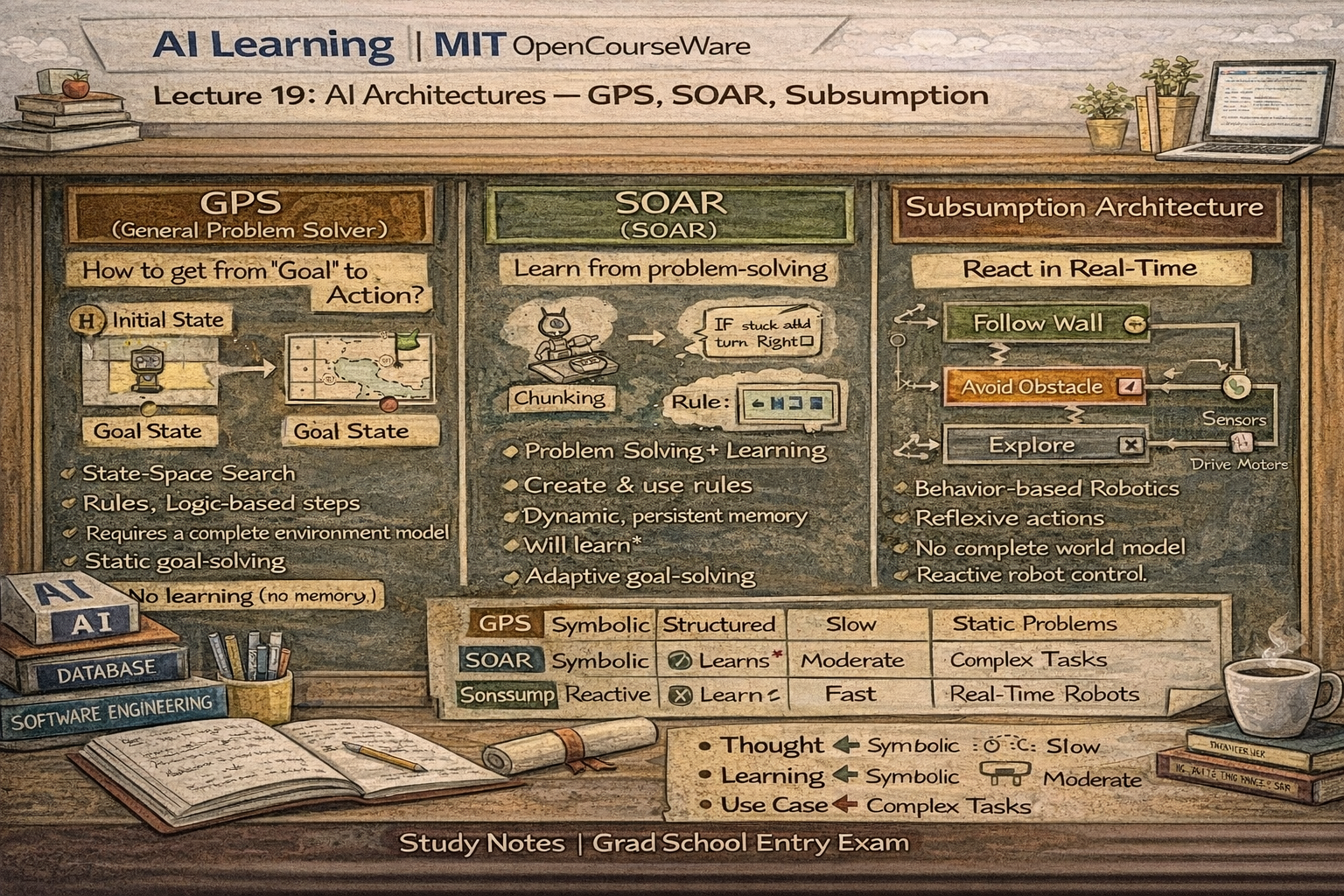
三、三者对比表(直接背)
| 架构 | 思想 | 是否搜索 | 是否学习 | 适合场景 |
|---|---|---|---|---|
| GPS | 符号推理 | ✅ | ❌ | 静态问题 |
| SOAR | 推理 + 学习 | ✅ | ✅ | 复杂问题 |
| 包容架构 | 行为驱动 | ❌ | ❌ | 实时机器人 |
四、日本大学院「怎么考」这节?
典型问法(你一定会遇到)
- 哪种架构适合实时环境?
- 哪种需要完整世界模型?
- 哪种具有学习能力?
- 哪种不依赖集中式规划?
👉 全部是“理解题”,不是背书
五、给你一个万能日文回答模板(超实用)
GPS は問題を状態空間として表現し、探索により解決を行うが、
動的環境には適さない。
SOAR は問題解決過程を学習として蓄積する点に特徴がある。
包容アーキテクチャは行動を優先し、リアルタイム性に優れる。
👉 这一段能直接写在笔试说明题里。
4-课后练习(日语版本)
【問題1】(AIアーキテクチャの基本理解)
次のうち,GPS(General Problem Solver) の特徴として最も適切なものはどれか。
A. 行動層を階層的に構成し,上位行動が下位行動を抑制する
B. 問題を状態空間として表現し,探索によって解を求める
C. 経験をルールとして蓄積し,再利用する学習機構を持つ
D. 環境モデルを持たず,反応的に行動を生成する
【問題2】(学習能力に関する理解)
次の文の空欄に入る最も適切なアーキテクチャはどれか。
問題解決の過程で発生した行き詰まりをサブゴールとして解決し,
その結果をルールとして記憶することで,
同様の問題に対する探索を省略できるアーキテクチャは【 】である。
A. GPS
B. SOAR
C. 包容アーキテクチャ
D. A*探索
【問題3】(リアルタイム性と環境適応)
動的かつ予測困難な環境において,
ロボットが即時的に行動を決定することが最も期待できる
アーキテクチャはどれか。
A. GPS
B. SOAR
C. 包容アーキテクチャ
D. 問題解決型探索アーキテクチャ
【問題4】(比較理解・応用)
GPS と 包容アーキテクチャの違いに関する説明として,
最も適切なものはどれか。
A. 両者とも環境の完全な世界モデルを必要としない
B. GPS は反応的行動を重視し,包容アーキテクチャは探索を行う
C. GPS は集中型の問題解決を行い,包容アーキテクチャは行動優先である
D. 包容アーキテクチャは学習機構を中核に持つ
5-课后练习(日语版本)解析
✅ 结果总览
| 题号 | 你的答案 | 正确答案 | 判定 |
|---|---|---|---|
| 1 | B | B | ✅ |
| 2 | A | B | ❌ |
| 3 | C | C | ✅ |
| 4 | C | C | ✅ |
👉 4 题中对 3 题,而且错的那一题是非常典型的入试陷阱,这反而是好事。
❌ 问题 2 —— 为什么 A(GPS)是错的?
题干关键句再看一遍(这是抓分点):
問題解決の過程で発生した行き詰まりをサブゴールとして解決し,
その結果をルールとして記憶する
这句话直接锁定的是谁?
👉 SOAR 的核心机制:Chunking(规则学习)
GPS 为什么不行?
| GPS | SOAR |
|---|---|
| ❌ 不学习 | ✅ 会学习 |
| ❌ 不记忆经验 | ✅ 把经验变成规则 |
| 只会“从头搜索” | 下次直接用规则 |
👉 “记忆 / 再利用” = SOAR 专属关键词
你为什么会选 A?(这很正常)
因为:
- GPS 和 SOAR 都在“问题解决”
- 但 只有 SOAR 把“过程”存下来
👉 日本大学院最喜欢考的就是
「看起来很像,但有没有“学习”」
🧠 判断口诀
- 探索但不学习 → GPS
- 探索 + 经验记忆 → SOAR
- 实时反应、行为优先 → 包容架构
6-总结
知识一点点记录吧,最后应对考试,打下基础

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 12
12 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)