Modeling and Analysis of OFDM-Based 5G/6G Localization Under Hardware Impairments
总而言之(To summarize),我们在 (1) 中定义了一个不考虑 HWI 的 MM (Mismatched Model,此处指用于算法开发的理想模型),它将用于算法开发。引入 HWI 后,(23) 中定义的损伤模型将被用作 TM (True Model,真实模型)。在接下来的部分中,我们将评估使用 MM 处理由 TM 生成的数据对定位性能的影响。为了便于性能分析,我们要分别用μgημgη
D. 硬件损伤模型
考虑到第 II-C 节中描述的所有类型的硬件损伤 (HWI),并将 (10)–(20) 代入 (9),观测结果可以在频域中重写。
-
HWI 下的发射信号: 跨子载波和天线的预编码发射信号从 X g = x g v g T ∈ C K × N U \mathbf{X}_g = \mathbf{x}_g \mathbf{v}_g^\mathsf{T} \in \mathbb{C}^{K \times N_{\text{U}}} Xg=xgvgT∈CK×NU 修改为
X ˇ g = F h PA ( E U Ξ U ( α U F H x g + β U F H x g ∗ ) v g T ⏟ PA 前的预编码时域信号 ) . (21) \check{\mathbf{X}}_g = \mathbf{F} h_{\text{PA}} (\underbrace{\mathbf{E}_{\text{U}} \boldsymbol{\Xi}_{\text{U}} (\alpha_{\text{U}} \mathbf{F}^\mathsf{H} \mathbf{x}_g + \beta_{\text{U}} \mathbf{F}^\mathsf{H} \mathbf{x}_g^*) \mathbf{v}_g^\mathsf{T}}_{\text{PA 前的预编码时域信号}}) . \tag{21} Xˇg=FhPA(PA 前的预编码时域信号 EUΞU(αUFHxg+βUFHxg∗)vgT).(21) -
HWI 下的信道: 信道从 (4) 中的 H k = α d k ( τ ) a ( φ B ) a T ( φ U ) ∈ C N B × N U \mathbf{H}_k = \alpha d_k(\tau) \mathbf{a}(\boldsymbol{\varphi}_{\text{B}}) \mathbf{a}^\mathsf{T}(\boldsymbol{\varphi}_{\text{U}}) \in \mathbb{C}^{N_{\text{B}} \times N_{\text{U}}} Hk=αdk(τ)a(φB)aT(φU)∈CNB×NU 修改为
H ˇ = α d k ( τ ) C B ( b B ( φ B ) ⊙ e j 2 π λ Z ~ B T t B ( φ B ) ⏟ 导向矢量 a ~ B ( φ B ) ) \check{\mathbf{H}} = \alpha d_k(\tau) \mathbf{C}_{\text{B}} (\underbrace{\mathbf{b}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}}) \odot e^{j \frac{2\pi}{\lambda} \tilde{\mathbf{Z}}_{\text{B}}^\mathsf{T} \mathbf{t}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}})}}_{\text{导向矢量 } \tilde{\mathbf{a}}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}})}) Hˇ=αdk(τ)CB(导向矢量 a~B(φB) bB(φB)⊙ejλ2πZ~BTtB(φB))
× ( b U ( φ U ) ⊙ e j 2 π λ Z ~ U T t U ( φ U ) ⏟ 导向矢量 a ~ U ( φ U ) ) C U T . (22) \times (\underbrace{\mathbf{b}_{\text{U}}(\boldsymbol{\varphi}_{\text{U}}) \odot e^{j \frac{2\pi}{\lambda} \tilde{\mathbf{Z}}_{\text{U}}^\mathsf{T} \mathbf{t}_{\text{U}}(\boldsymbol{\varphi}_{\text{U}})}}_{\text{导向矢量 } \tilde{\mathbf{a}}_{\text{U}}(\boldsymbol{\varphi}_{\text{U}})}) \mathbf{C}_{\text{U}}^\mathsf{T} . \tag{22} ×(导向矢量 a~U(φU) bU(φU)⊙ejλ2πZ~UTtU(φU))CUT.(22)
- HWI 下的接收信号: 接收信号从 y g ∈ C K × 1 \mathbf{y}_g \in \mathbb{C}^{K \times 1} yg∈CK×1 修改为 ( 23 ) 6 (23)^6 (23)6,即
^6 考虑所有 HWI 的信号模型提供了比简单叠加个体影响更准确的分析,因为它们不保持线性关系。此外,方程 (21) 至 (23) 提供了灵活性,可以评估单个 HWI 与整体 HWI 相比的贡献,以识别降低系统性能的主导分量。
E. 模型总结
总而言之(To summarize),我们在 (1) 中定义了一个不考虑 HWI 的 MM (Mismatched Model,此处指用于算法开发的理想模型),它将用于算法开发。引入 HWI 后,(23) 中定义的损伤模型将被用作 TM (True Model,真实模型)。在接下来的部分中,我们将评估使用 MM 处理由 TM 生成的数据对定位性能的影响。为了便于性能分析,我们要分别用 μ g ( η ) \boldsymbol{\mu}_g(\boldsymbol{\eta}) μg(η) 和 μ ˉ g ( η ) \bar{\boldsymbol{\mu}}_g(\boldsymbol{\eta}) μˉg(η) 表示 (1) 和 (23) 的无噪声观测
III. LOCALIZATION ALGORITHM
基于上述描述的模型,可以构建一个两阶段定位^7 问题,即首先基于来自所有 BS 的接收信号 y ^ 1 , … , y ^ L \hat{\mathbf{y}}_1, \dots, \hat{\mathbf{y}}_L y^1,…,y^L 估计信道参数向量 η ^ ch = [ η 1 T , … , η L T ] T \hat{\boldsymbol{\eta}}_{\text{ch}} = [\boldsymbol{\eta}_1^\mathsf{T}, \dots, \boldsymbol{\eta}_L^\mathsf{T}]^\mathsf{T} η^ch=[η1T,…,ηLT]T,然后从 η ^ ch \hat{\boldsymbol{\eta}}_{\text{ch}} η^ch 确定状态向量 s ^ \hat{\mathbf{s}} s^。
- UE \text{UE} UE (发射机)状态参数向量 s = [ p U ⊤ , B U , vec ( R U ) ⊤ ] ⊤ ∈ R 13 \mathbf{s} = [\mathbf{p}_{\text{U}}^\top, B_{\text{U}}, \text{vec}(\mathbf{R}_{\text{U}})^\top]^\top \in \mathbb{R}^{13} s=[pU⊤,BU,vec(RU)⊤]⊤∈R13 ,其中包含 UE \text{UE} UE 位置 p U \mathbf{p}_{\text{U}} pU 、时钟偏差 B U B_{\text{U}} BU 和旋转矩阵 R U \mathbf{R}_{\text{U}} RU
- 几何参数向量定义为 η ch = [ η 1 ⊤ , … , η L ⊤ ] ⊤ \boldsymbol{\eta}_\text{ch} = [\boldsymbol{\eta}_1^\top, \dots, \boldsymbol{\eta}_L^\top]^\top ηch=[η1⊤,…,ηL⊤]⊤ ,其中对于第 l l l 个基站, η l = [ φ B , l ⊤ , φ U , l ⊤ , τ l , ρ l , ξ l ] ⊤ ∈ R 7 \boldsymbol{\eta}_l = [\boldsymbol{\varphi}_{\text{B},l}^\top, \boldsymbol{\varphi}_{\text{U},l}^\top, \tau_l, \rho_l, \xi_l]^\top \in \mathbb{R}^7 ηl=[φB,l⊤,φU,l⊤,τl,ρl,ξl]⊤∈R7
A. Mismatched Maximum Likelihood Estimator
当观测值 y \mathbf{y} y 是由算法所使用的同一模型生成时,可以采用最大似然估计 (maximum likelihood estimation,MLE)。如果 y ∼ f TM ( y ∣ η ˉ ) \mathbf{y} \sim f_{\text{TM}}(\mathbf{y}|\bar{\boldsymbol{\eta}}) y∼fTM(y∣ηˉ),UE 位置和信道增益的 MLE 为
η ^ MLE = arg max η ˉ ln f TM ( y ∣ η ˉ ) , (24) \hat{\boldsymbol{\eta}}_{\text{MLE}} = \arg \max_{\bar{\boldsymbol{\eta}}} \ln f_{\text{TM}}(\mathbf{y}|\bar{\boldsymbol{\eta}}), \tag{24} η^MLE=argηˉmaxlnfTM(y∣ηˉ),(24)
其中 ln f TM ( y ∣ η ˉ ) \ln f_{\text{TM}}(\mathbf{y}|\bar{\boldsymbol{\eta}}) lnfTM(y∣ηˉ) 是 TM 的对数似然函数。然而,如果估计器不知道存在的误配,MLE 就退化为误配最大似然估计 (boils down to mismatched maximum likelihood estimation,MMLE)(即 y ∼ f TM ( y ∣ η ˉ ) \mathbf{y} \sim f_{\text{TM}}(\mathbf{y}|\bar{\boldsymbol{\eta}}) y∼fTM(y∣ηˉ) 而估计器使用 f MM ( y ∣ η ) ≠ f TM ( y ∣ η ˉ ) f_{\text{MM}}(\mathbf{y}|\boldsymbol{\eta}) \neq f_{\text{TM}}(\mathbf{y}|\bar{\boldsymbol{\eta}}) fMM(y∣η)=fTM(y∣ηˉ)),由下式给出
η ^ MMLE = arg max η ln f MM ( y ∣ η ) . (25) \hat{\boldsymbol{\eta}}_{\text{MMLE}} = \arg \max_{\boldsymbol{\eta}} \ln f_{\text{MM}}(\mathbf{y}|\boldsymbol{\eta}). \tag{25} η^MMLE=argηmaxlnfMM(y∣η).(25)
更具体地说,方程 (25) 制定了用于信道参数提取的 MMLE,这也可以在已知或近似似然函数的情况下用于位置和方向估计。一种实用的方法是使用带有初始点的梯度下降法,这将在随后的子节中详细介绍。
B. Channel Parameters Estimation
信道参数估计将使用 ESPRIT 进行粗估计,这为使用 (25) 的精细估计提供了一个良好的初始点。
1) 使用 ESPRIT 的粗估计:
我们的目标是以低复杂度获得信道参数的初始估计,这可以使用基于张量的波束空间 ESPRIT 8 ^8 8 算法 [11] 来解决。为了实现波束空间 ESPRIT 算法,我们基于 (1) 将波束空间信道矩阵 H ( b ) \mathbf{H}^{(b)} H(b)(用于张量分解)重新表述为
H k ( b ) = α d k ( τ ) W H a B ( φ B ) a U T ( φ U ) V (26) \mathbf{H}_k^{(b)} = \alpha d_k(\tau) \mathbf{W}^\mathsf{H} \mathbf{a}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}}) \mathbf{a}_{\text{U}}^\mathsf{T}(\boldsymbol{\varphi}_{\text{U}}) \mathbf{V} \tag{26} Hk(b)=αdk(τ)WHaB(φB)aUT(φU)V(26)
^7 相比之下,直接定位法直接从观测信号向量 y \mathbf{y} y 估计状态向量 s \mathbf{s} s。考虑到涉及的高复杂度,我们在本项工作采用两阶段定位。
^8 虽然这项工作只考虑 LOS 信道,但 ESPRIT 也适用于具有 NLOS 路径的场景。
其中 W = T 1 ⊗ T 2 ∈ C N 1 N 2 × M 1 M 2 \mathbf{W} = \mathbf{T}_1 \otimes \mathbf{T}_2 \in \mathbb{C}^{N_1 N_2 \times M_1 M_2} W=T1⊗T2∈CN1N2×M1M2 且 V = ( T 3 ⊗ T 4 ) ∗ ∈ C N 3 N 4 × M 3 M 4 \mathbf{V} = (\mathbf{T}_3 \otimes \mathbf{T}_4)^* \in \mathbb{C}^{N_3 N_4 \times M_3 M_4} V=(T3⊗T4)∗∈CN3N4×M3M4 是合并矩阵和预编码矩阵,总传输次数 G = M 1 M 2 M 3 M 4 G = M_1 M_2 M_3 M_4 G=M1M2M3M4。这里, T i \mathbf{T}_i Ti 是包含第 i i i 维(即 AOA/AOD 的方位角/仰角)的 M i M_i Mi 个导向矢量的码本。由于天线位置矩阵 Z ~ \tilde{\mathbf{Z}} Z~ 的第一行全为零(见第 II-A 节和 (3)),我们可以将导向矢量表示为
a B ( φ B ) = a ( M 1 ) ( ω 1 ) ⊗ a ( M 2 ) ( ω 2 ) , (27) \mathbf{a}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}}) = \mathbf{a}^{(M_1)}(\omega_1) \otimes \mathbf{a}^{(M_2)}(\omega_2), \tag{27} aB(φB)=a(M1)(ω1)⊗a(M2)(ω2),(27)
其中
ω 1 = π sin ( ϕ B ) cos ( θ B ) , ω 2 = π sin ( θ B ) , (28) \omega_1 = \pi \sin(\phi_{\text{B}}) \cos(\theta_{\text{B}}), \quad \omega_2 = \pi \sin(\theta_{\text{B}}), \tag{28} ω1=πsin(ϕB)cos(θB),ω2=πsin(θB),(28)
a B ( M 1 ) ( ω 1 ) = e j 2 π f c sin ( ϕ B ) cos ( θ B ) c z ~ B , 2 = e j 2 λ c ω 1 z ~ B , 2 , (29) \mathbf{a}_{\text{B}}^{(M_1)}(\omega_1) = e^{j \frac{2\pi f_c \sin(\phi_{\text{B}}) \cos(\theta_{\text{B}})}{c} \tilde{\mathbf{z}}_{\text{B},2}} = e^{j \frac{2}{\lambda_c} \omega_1 \tilde{\mathbf{z}}_{\text{B},2}}, \tag{29} aB(M1)(ω1)=ejc2πfcsin(ϕB)cos(θB)z~B,2=ejλc2ω1z~B,2,(29)
a B ( M 2 ) ( ω 2 ) = e j 2 π f c sin ( θ B ) c z ~ B , 3 = e j 2 λ c ω 2 z ~ B , 3 . (30) \mathbf{a}_{\text{B}}^{(M_2)}(\omega_2) = e^{j \frac{2\pi f_c \sin(\theta_{\text{B}})}{c} \tilde{\mathbf{z}}_{\text{B},3}} = e^{j \frac{2}{\lambda_c} \omega_2 \tilde{\mathbf{z}}_{\text{B},3}}. \tag{30} aB(M2)(ω2)=ejc2πfcsin(θB)z~B,3=ejλc2ω2z~B,3.(30)
这里, z ~ B , 2 T ∈ C 1 × N B \tilde{\mathbf{z}}_{\text{B},2}^\mathsf{T} \in \mathbb{C}^{1 \times N_{\text{B}}} z~B,2T∈C1×NB 和 z ~ B , 3 T ∈ C 1 × N B \tilde{\mathbf{z}}_{\text{B},3}^\mathsf{T} \in \mathbb{C}^{1 \times N_{\text{B}}} z~B,3T∈C1×NB 分别是矩阵 Z ~ \tilde{\mathbf{Z}} Z~ 的第二行和第三行。合并矩阵可以根据空间频率网格 ω ˉ 1 = [ ω ˉ 1 , 1 , … , ω ˉ 1 , M 1 ] \bar{\boldsymbol{\omega}}_1 = [\bar{\omega}_{1,1}, \dots, \bar{\omega}_{1,M_1}] ωˉ1=[ωˉ1,1,…,ωˉ1,M1] 和 ω ˉ 2 = [ ω ˉ 2 , 1 , … , ω ˉ 2 , M 2 ] \bar{\boldsymbol{\omega}}_2 = [\bar{\omega}_{2,1}, \dots, \bar{\omega}_{2,M_2}] ωˉ2=[ωˉ2,1,…,ωˉ2,M2] 定义为
T 1 = [ a ( N 1 ) ( ω ˉ 1 , 1 ) , … , a ( N 1 ) ( ω ˉ 1 , M 1 ) ] T ∈ C N 1 × M 1 , (31) \mathbf{T}_1 = [\mathbf{a}^{(N_1)}(\bar{\omega}_{1,1}), \dots, \mathbf{a}^{(N_1)}(\bar{\omega}_{1,M_1})]^\mathsf{T} \in \mathbb{C}^{N_1 \times M_1}, \tag{31} T1=[a(N1)(ωˉ1,1),…,a(N1)(ωˉ1,M1)]T∈CN1×M1,(31)
T 2 = [ a ( N 2 ) ( ω ˉ 2 , 1 ) , … , a ( N 2 ) ( ω ˉ 2 , M 2 ) ] T ∈ C N 2 × M 2 , (32) \mathbf{T}_2 = [\mathbf{a}^{(N_2)}(\bar{\omega}_{2,1}), \dots, \mathbf{a}^{(N_2)}(\bar{\omega}_{2,M_2})]^\mathsf{T} \in \mathbb{C}^{N_2 \times M_2}, \tag{32} T2=[a(N2)(ωˉ2,1),…,a(N2)(ωˉ2,M2)]T∈CN2×M2,(32)
其中 ω ˉ 1 , m \bar{\omega}_{1,m} ωˉ1,m 和 ω ˉ 2 , m \bar{\omega}_{2,m} ωˉ2,m 由波束成形方向决定(详见第 V 节)。类似的推理适用于 UE 处的导向矢量 a U ( M 3 ) ( ω 3 ) \mathbf{a}_{\text{U}}^{(M_3)}(\omega_3) aU(M3)(ω3) 和 a U ( M 4 ) ( ω 4 ) \mathbf{a}_{\text{U}}^{(M_4)}(\omega_4) aU(M4)(ω4) 以定义 T 3 \mathbf{T}_3 T3 和 T 4 \mathbf{T}_4 T4,其中
ω 3 = π sin ( ϕ U ) cos ( θ U ) , ω 4 = π sin ( θ U ) . (33) \omega_3 = \pi \sin(\phi_{\text{U}}) \cos(\theta_{\text{U}}), \quad \omega_4 = \pi \sin(\theta_{\text{U}}). \tag{33} ω3=πsin(ϕU)cos(θU),ω4=πsin(θU).(33)
我们进一步定义 b ( M n ) ( ω n ) = T n H a N n ( ω n ) ∈ C M n \mathbf{b}^{(M_n)}(\omega_n) = \mathbf{T}_n^\mathsf{H} \mathbf{a}^{N_n}(\omega_n) \in \mathbb{C}^{M_n} b(Mn)(ωn)=TnHaNn(ωn)∈CMn 对于 n ∈ { 1 , 2 , 3 , 4 } n \in \{1, 2, 3, 4\} n∈{1,2,3,4} 以及 b ( M 5 ) ( ω 5 ) = d ( τ ) ( ω 5 = 2 π Δ f τ ) \mathbf{b}^{(M_5)}(\omega_5) = \mathbf{d}(\tau) (\omega_5 = 2\pi \Delta_f \tau) b(M5)(ω5)=d(τ)(ω5=2πΔfτ),并且 (26) 中的波束空间信道矩阵可以表示为一个张量 H ∈ C M 1 × M 2 × ⋯ × M 5 \boldsymbol{\mathcal{H}} \in \mathbb{C}^{M_1 \times M_2 \times \dots \times M_5} H∈CM1×M2×⋯×M5 如下 [6]
H ( b ) = α b ( M 1 ) ( ω 1 ) ∘ ⋯ ∘ b ( M 5 ) ( ω 5 ) . (34) \boldsymbol{\mathcal{H}}^{(b)} = \alpha \mathbf{b}^{(M_1)}(\omega_1) \circ \dots \circ \mathbf{b}^{(M_5)}(\omega_5). \tag{34} H(b)=αb(M1)(ω1)∘⋯∘b(M5)(ω5).(34)
在实践中,估计的波束空间信道矩阵可以通过已知的导频信号估计为 vec ( H ^ k ( b ) ) = [ y ^ 1 , k / x 1 , k , … , y ^ G , k / x G , k ] T \text{vec}(\hat{\mathbf{H}}_k^{(b)}) = [\hat{y}_{1,k}/x_{1,k}, \dots, \hat{y}_{G,k}/x_{G,k}]^\mathsf{T} vec(H^k(b))=[y^1,k/x1,k,…,y^G,k/xG,k]T。通过将估计的信道重排为 (34) 所示的张量 H ^ ( b ) \hat{\boldsymbol{\mathcal{H}}}^{(b)} H^(b),然后可以使用波束空间基于张量的 ESPRIT 方法来估计 ω 1 \omega_1 ω1 到 ω 5 \omega_5 ω5 并据此获得 AOA、AOD 和延迟 [6], [11]。
2) Fine Estimation Using MMLE
从 ESPRIT 中,我们可以获得信道参数的初始估计 η ^ 0 \hat{\boldsymbol{\eta}}_0 η^0。初始估计的精细化可以根据 (25) 表述为一个优化问题,如下
η ^ = arg min η ∥ y − μ ( η ) ∥ 2 . (35) \hat{\boldsymbol{\eta}} = \arg \min_{\boldsymbol{\eta}} \|\mathbf{y} - \boldsymbol{\mu}(\boldsymbol{\eta})\|^2. \tag{35} η^=argηmin∥y−μ(η)∥2.(35)
由于 α \alpha α 在无噪声观测 μ \boldsymbol{\mu} μ 中线性出现,我们进一步定义 γ ( η ) = μ ( c ) / α \boldsymbol{\gamma}(\boldsymbol{\eta}) = \boldsymbol{\mu}(\mathbf{c})/\alpha γ(η)=μ(c)/α,其中 c = [ φ B T , φ U T , τ ] T \mathbf{c} = [\boldsymbol{\varphi}_{\text{B}}^\mathsf{T}, \boldsymbol{\varphi}_{\text{U}}^\mathsf{T}, \tau]^\mathsf{T} c=[φBT,φUT,τ]T。通过设置 ∂ ∥ y − μ ( η ) ∥ 2 / ∂ α = 0 \partial \|\mathbf{y} - \boldsymbol{\mu}(\boldsymbol{\eta})\|^2 / \partial \alpha = 0 ∂∥y−μ(η)∥2/∂α=0,我们可以得到
c ^ = arg min c ∥ y − γ H ( c ) y ∥ γ H ( c ) ∥ 2 γ ( c ) ∥ 2 . (36) \hat{\mathbf{c}} = \arg \min_{\mathbf{c}} \|\mathbf{y} - \frac{\boldsymbol{\gamma}^\mathsf{H}(\mathbf{c})\mathbf{y}}{\|\boldsymbol{\gamma}^\mathsf{H}(\mathbf{c})\|^2} \boldsymbol{\gamma}(\mathbf{c})\|^2. \tag{36} c^=argcmin∥y−∥γH(c)∥2γH(c)yγ(c)∥2.(36)
通过这种方式,可以去除冗余参数,从而减少未知参数的维度。
- μ g ( η ) = α ( w g T a B ( φ B ) a U T ( φ U ) v g ) d ( τ ) ⊙ x g \boldsymbol{\mu}_g(\boldsymbol{\eta}) = \alpha (\mathbf{w}_g^\mathsf{T} \mathbf{a}_{\text{B}}(\boldsymbol{\varphi}_{\text{B}}) \mathbf{a}_{\text{U}}^\mathsf{T}(\boldsymbol{\varphi}_{\text{U}}) \mathbf{v}_g) \mathbf{d}(\tau) \odot \mathbf{x}_g μg(η)=α(wgTaB(φB)aUT(φU)vg)d(τ)⊙xg其中 y \mathbf{y} y 包含所有传输时刻的信号, μ ( η ) \boldsymbol{\mu}(\boldsymbol{\eta}) μ(η) 即为所有 g = 1 , … , G g=1,\dots,G g=1,…,G 时刻的 μ g ( η ) \boldsymbol{\mu}_g(\boldsymbol{\eta}) μg(η) 堆叠而成的长向量。
C. Localization Algorithm
- 粗估计: 给定所有信道的估计几何参数向量 c l \mathbf{c}_l cl ( 1 ≤ l ≤ L 1 \le l \le L 1≤l≤L),位置和方向粗估计的最小二乘解为
R ^ U,LS = { U V T , if det ( U V T ) = 1 , U J V T , if det ( U V T ) = − 1 , (37) \hat{\mathbf{R}}_{\text{U,LS}} = \begin{cases} \mathbf{U}\mathbf{V}^\mathsf{T}, & \text{if } \det(\mathbf{U}\mathbf{V}^\mathsf{T}) = 1, \\ \mathbf{U}\mathbf{J}\mathbf{V}^\mathsf{T}, & \text{if } \det(\mathbf{U}\mathbf{V}^\mathsf{T}) = -1, \end{cases} \tag{37} R^U,LS={UVT,UJVT,if det(UVT)=1,if det(UVT)=−1,(37)
[ p ^ U,LS T , B ^ U,LS ] T = ( Q 3 T Q 3 ) − 1 Q 3 T q , (38) [\hat{\mathbf{p}}_{\text{U,LS}}^\mathsf{T}, \hat{B}_{\text{U,LS}}]^\mathsf{T} = (\mathbf{Q}_3^\mathsf{T} \mathbf{Q}_3)^{-1} \mathbf{Q}_3^\mathsf{T} \mathbf{q}, \tag{38} [p^U,LST,B^U,LS]T=(Q3TQ3)−1Q3Tq,(38)
其中 J = diag ( [ 1 , 1 , − 1 ] ) \mathbf{J} = \text{diag}([1,1,-1]) J=diag([1,1,−1]), U \mathbf{U} U 和 V \mathbf{V} V 是矩阵 Q 1 Q 2 T \mathbf{Q}_1 \mathbf{Q}_2^\mathsf{T} Q1Q2T 的奇异值分解的酉基矩阵,连同 Q 3 \mathbf{Q}_3 Q3、 q \mathbf{q} q 由下式给出
Q 1 = − [ R B , 1 t ( φ ^ B , 1 ) , … , R B , L t ( φ ^ B , L ) ] , (39) \mathbf{Q}_1 = -[\mathbf{R}_{\text{B},1} \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},1}), \dots, \mathbf{R}_{\text{B},L} \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},L})], \tag{39} Q1=−[RB,1t(φ^B,1),…,RB,Lt(φ^B,L)],(39)
Q 2 = [ t ( φ ^ U , 1 ) , … , t ( φ ^ U , L ) ] , (40) \mathbf{Q}_2 = [\mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{U},1}), \dots, \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{U},L})], \tag{40} Q2=[t(φ^U,1),…,t(φ^U,L)],(40)
Q 3 = [ I 3 R B , 1 t ( φ ^ B , 1 ) ⋮ ⋮ I 3 R B , L t ( φ ^ B , L ) ] , (41) \mathbf{Q}_3 = \begin{bmatrix} \mathbf{I}_3 & \mathbf{R}_{\text{B},1} \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},1}) \\ \vdots & \vdots \\ \mathbf{I}_3 & \mathbf{R}_{\text{B},L} \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},L}) \end{bmatrix}, \tag{41} Q3= I3⋮I3RB,1t(φ^B,1)⋮RB,Lt(φ^B,L) ,(41)
q = [ p B ( 1 ) + R B , 1 τ ^ 1 t ( φ ^ B , 1 ) ⋮ p B , L + R B , L τ ^ L t ( φ ^ B , L ) ] . (42) \mathbf{q} = \begin{bmatrix} \mathbf{p}_{\text{B}}^{(1)} + \mathbf{R}_{\text{B},1} \hat{\tau}_1 \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},1}) \\ \vdots \\ \mathbf{p}_{\text{B},L} + \mathbf{R}_{\text{B},L} \hat{\tau}_L \mathbf{t}(\hat{\boldsymbol{\varphi}}_{\text{B},L}) \end{bmatrix}. \tag{42} q= pB(1)+RB,1τ^1t(φ^B,1)⋮pB,L+RB,Lτ^Lt(φ^B,L) .(42)
(38) 中的位置和时钟偏差估计器不需要 UE 的方向 R U \mathbf{R}_{\text{U}} RU,但这作为粗估计仍然是足够的,正如将在仿真部分展示的那样。
- MMLE: 一旦获得初始位置和方向结果,使用 MMLE 的联合位置和方向估计可以表述为
s ^ = arg min s ∑ l = 1 L ( c l ( s ) − c ^ l ) T Σ c l − 1 ( c l ( s ) − c ^ l ) , (43) \hat{\mathbf{s}} = \arg \min_{\mathbf{s}} \sum_{l=1}^{L} (\mathbf{c}_l(\mathbf{s}) - \hat{\mathbf{c}}_l)^\mathsf{T} \boldsymbol{\Sigma}_{c_l}^{-1} (\mathbf{c}_l(\mathbf{s}) - \hat{\mathbf{c}}_l), \tag{43} s^=argsminl=1∑L(cl(s)−c^l)TΣcl−1(cl(s)−c^l),(43)
这可以使用流形优化工具箱 Manopt [47] 来求解。注意,在实践中可能无法准确获得协方差矩阵。我们将定位表述为 MMLE 问题有两个目的:(a) 评估与粗估计相比,在已知协方差矩阵情况下的性能提升;(b) 验证推导的界限,这将在第 IV 节中详细介绍。

V. NUMERICAL RESULTS
3) The Effect of Individual Impairments
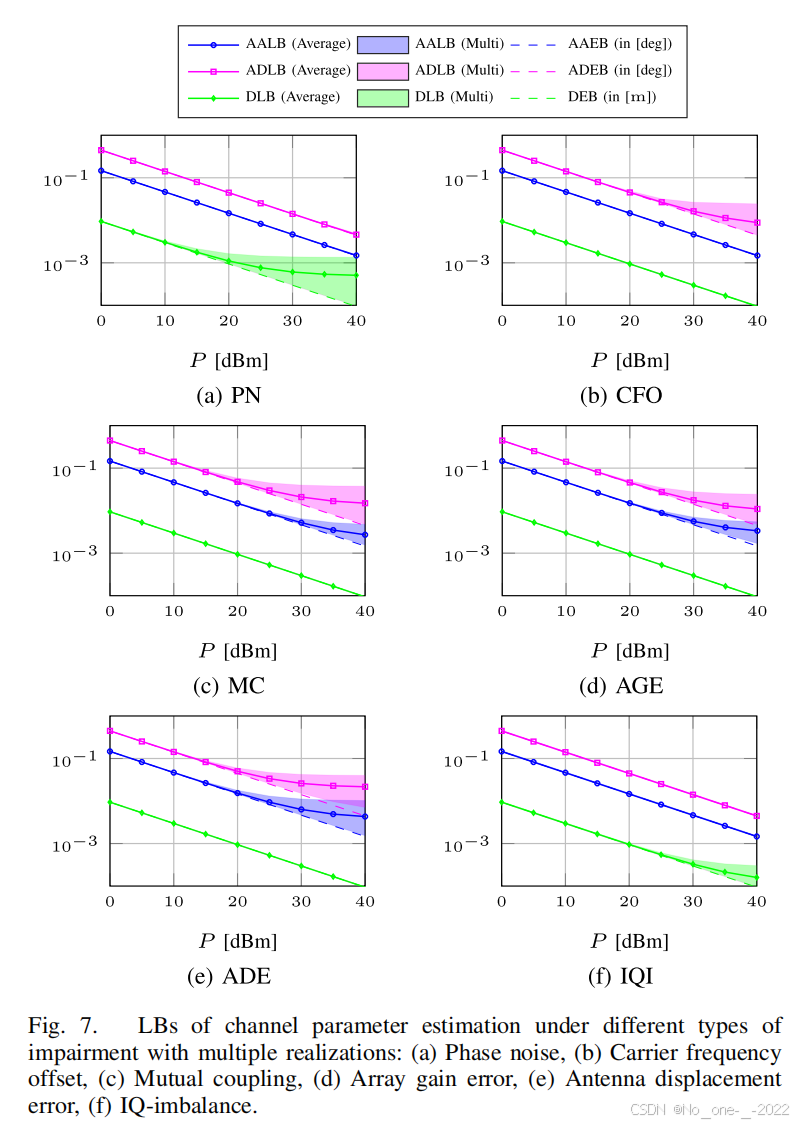
图 7. 多次实现条件下,不同类型损伤下的信道参数估计下界 (LBs):(a) 相位噪声,(b) 载波频率偏移, ( c ) (c) (c) 互耦,(d) 阵列增益误差,(e) 天线位置误差,(f) IQ 不平衡 。
- 误差界 (Error Bounds) - 虚线
这些界限是基于理想模型 (Mismatched Model, MM) 计算出的克拉美-罗界 (CRB)。它们代表在假设没有硬件损伤的情况下,理论上能达到的最佳估计性能。
- AAEB: AOA Angle Error Bound(到达角误差界)。
- ADEB: AOD Direciton Error Bound(离开角误差界)。
- DEB: Delay Error Bound(延迟误差界)。
- 下界 (Lower Bounds) - 实线/阴影
这些界限是误配下界 (Misspecified Lower Bound / MCRB)。它们考虑了真实模型 (TM, 含硬件损伤) 与算法使用的理想模型 (MM) 之间的不匹配,通常包含了一个由于模型不匹配引入的“偏差 (Bias)”项。
- AALB: AOA Absolute/Misspecified Lower Bound(到达角下界 - 考虑损伤)。
- ADLB: AOD Direction/Misspecified Lower Bound(离开角下界 - 考虑损伤)。
- DLB: Delay Lower Bound(延迟下界 - 考虑损伤)。
为了理解不同类型 HWI 的影响,我们通过一次只考虑一种 HWI 来研究 AOA、AOD 和延迟估计的下界(LB)。结果如图 7 所示,分别为 (a) PN、(b) CFO、 ( c ) (c) (c) MC、(d) AGE、(e) ADE 和 (f) IQI。PA 的影响将在第 V-C.4 节中单独讨论。
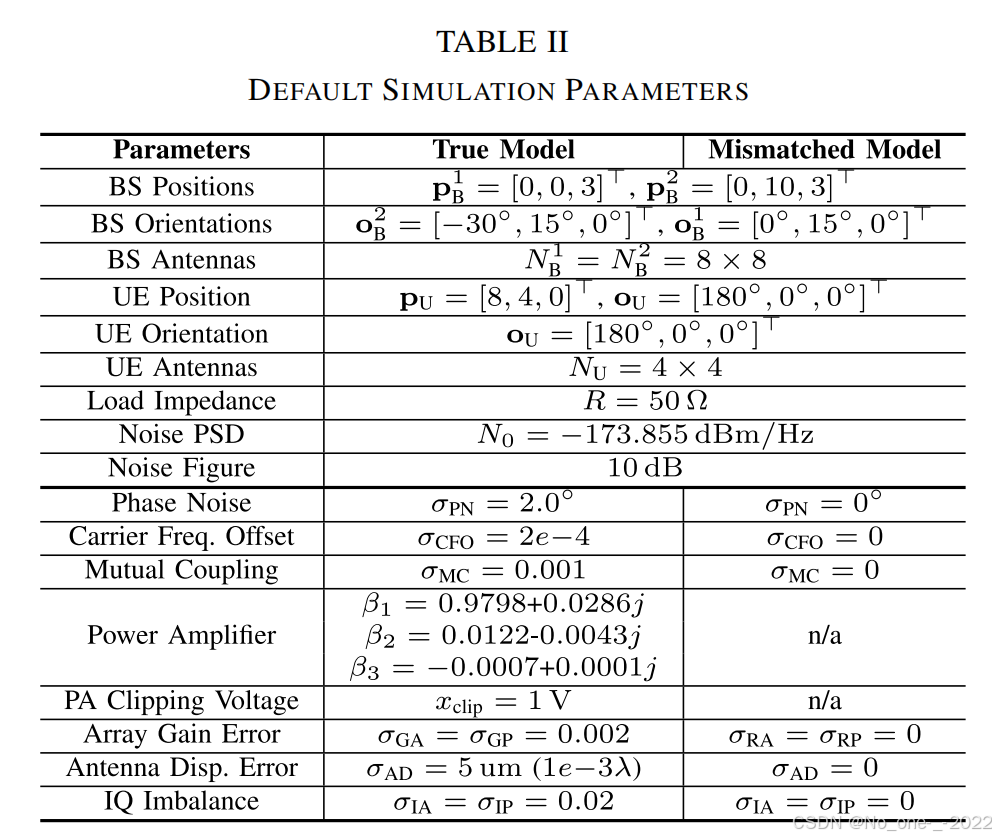
考虑到我们将 HWI 定义为具有固定损伤水平的随机变量(如表 II 所示),我们在固定导频信号下执行了多次硬件实现,并将所有结果 LB 绘制在阴影区域中。我们可以看到,不同类型的 HWI 对角度和延迟估计的影响不同。
- PN 和 IQI 在不同子载波的符号上引入噪声,因此影响延迟估计。
- CFO 引入的相位变化随时间增加(见 (11))^12,因此,角度估计(依赖于多次传输)将比延迟估计受到的影响更大。
- 其余的损伤,即 MC、AGE 和 ADE 会扭曲导向矢量,因此对角度估计有更显著的影响。
对于所有 HWI,当发射功率较高时,对性能的负面影响就会出现。
D. Summary of the Effects of HWIs
从仿真中,我们发现硬件损伤(HWIs)会同时影响定位和通信,特别是在高发射功率下。然而,不同类型的 HWIs 对定位和通信的影响是不同的。
对于通信,HWIs 会导致发射和接收信号失真,从而影响符号错误率(SER)。基于图 3,载波频率偏移(CFO)、互耦(MC)、阵列增益误差(AGE)和天线位置误差(ADE)对通信的影响有限。CFO 引入的失真是一种随时间累积的固定相移,可以通过更频繁的在线补偿来缓解。由于通信不利用天线间的相位关系(例如,一旦建立了通信链路就不需要波束扫描),因此 MC、AGE 和 ADE 对 SER 的影响也较小。
至于定位(As for localization),信号的失真会影响从估计信道中提取信道参数。更具体地说,基于 MCRB 分析(如 (54) 所示),由于真实模型(TM)与假设的理想模型(MM)(即用于开发算法的模型)之间存在失配,会引入偏差。
- 当信噪比(SNR)较低或精度要求不严格时,这种偏差不会对定位性能产生太大影响;
- 然而,在高精度定位系统中,这种偏差是不可忽略的(参见图 5 和图 6 中的性能饱和)。
- 对于定位中的角度估计,其性能受到 CFO、MC、AGE 和 ADE 的强烈影响。
- 关于到达时间(TOA),它主要受到那些同样影响通信 SER 的因素(例如相位噪声 PN 和 IQ 不平衡 IQI)的影响,如图 7 所示。
值得注意的是(It should be noted that),CFO 对 AOA 和 AOD 估计的影响取决于传输次数和扫描顺序。由于不同的定位系统(例如 BS 同步或 BS 异步)和场景(3D 或 6D 定位)可能会以不同方式处理角度和延迟估计,因此在执行定位时应考虑硬件选择(例如,选择具有较低 PN 水平的接收机)和补偿算法。表 III 总结了单个损伤对角度/延迟估计和通信(即 SER)的影响(H/L 表示高/低)。
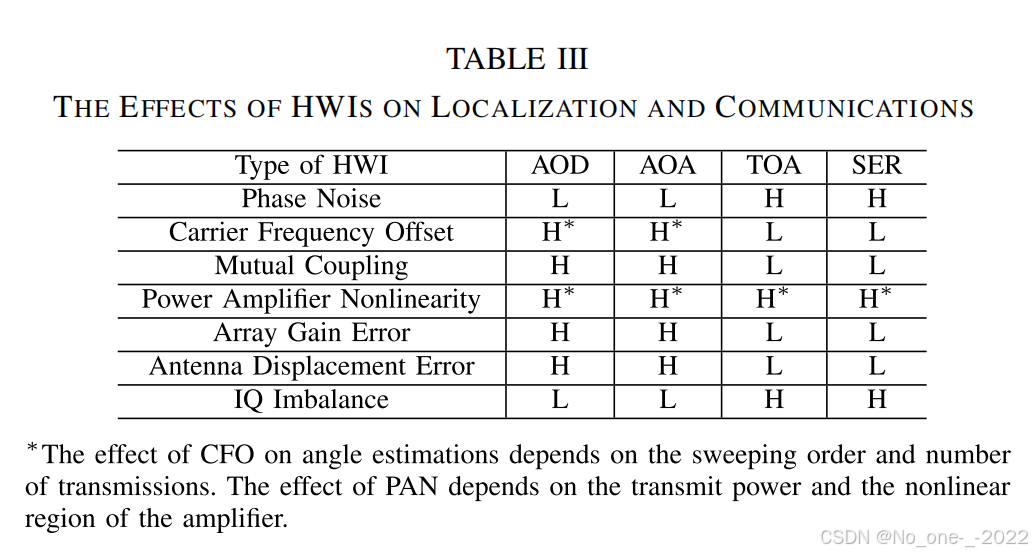
CFO 对角度估计的影响取决于扫描顺序和传输次数。PAN 的影响取决于发射功率和放大器的非线性区域。
- 例如,如果 AOA 更重要,则首选“基站优先 (BS first)”扫描),而功率放大器(PA)的影响取决于发射功率和放大器的非线性区域(例如,为了获得较低的峰均功率比(PAPR),首选 DFT-S-OFDM。
4) The Effect of PA With Different Pilot Signals
高峰均功率比 (PAPR) 是实现 OFDM 信号的关键问题之一,而一个有前景的替代方案是使用 DFT-S-OFDM。
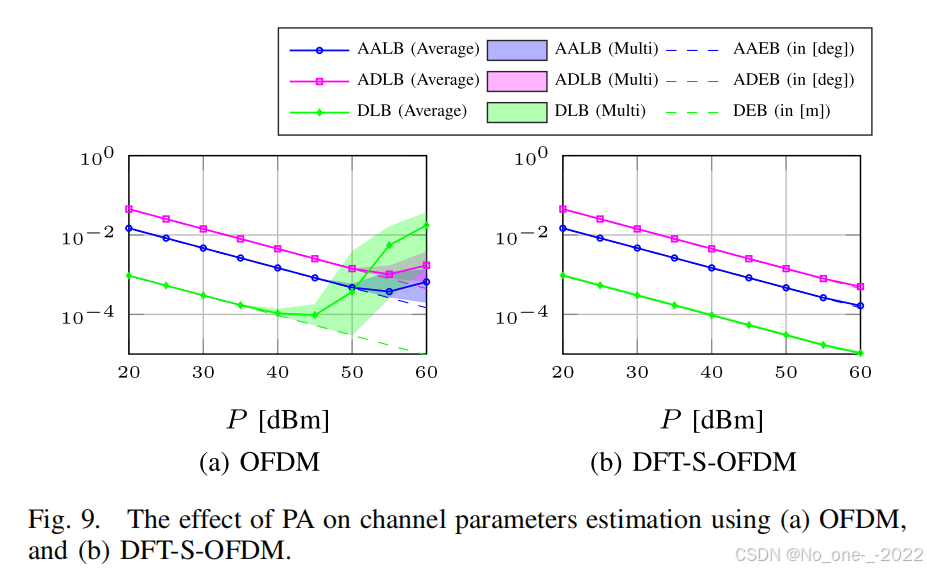
当增加发射功率时,PAN 更容易发生,如图 9 (a) 所示。虽然延迟估计利用的是 OFDM 符号内跨子载波的相位变化,但对于模拟阵列,角度估计依赖于 OFDM 帧中跨多个符号的相位/幅度变化,其中波束扫描是随时间进行的(即不同的符号对应不同的波束)。此外,在本工作中采用相同 PA 的情况下,不同天线阵元上的信号会经历相似的畸变(见图 1)。因此,(在相同的发射功率水平下)由 PAN 引起的信号畸变对角度估计的影响要小于对延迟估计的影响。我们比较了使用随机 OFDM 符号和基准符号的 FFT 版本(通过选择单位映射矩阵作为 DFT-S-OFDM 的一种特殊情况),结果如图 9 所示。由于 DFT-S-OFDM 降低了 PAPR,定位性能得以提高,如右图所示。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 11
11 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)