AI算力开放-yolov8适配 mmyolo大疆无人机
先更新 cuda
1如果之前有需要更新的话需要先删除
2查看 pytorch 支持的 cuda版本
https://pytorch.org/get-started/locally/?_gl=1*1nzhx7n*_up*MQ..*_ga*NjIxOTkyMDQuMTc2Nzc2OTA4NQ..*_ga_469Y0W5V62*czE3Njc3NjkwODQkbzEkZzAkdDE3Njc3NjkwODQkajYwJGwwJGgw&__hstc=76629258.724dacd2270c1ae797f3a62ecd655d50.1746547368336.1746547368336.1746547368336.1&__hssc=76629258.9.1746547368336&__hsfp=2230748894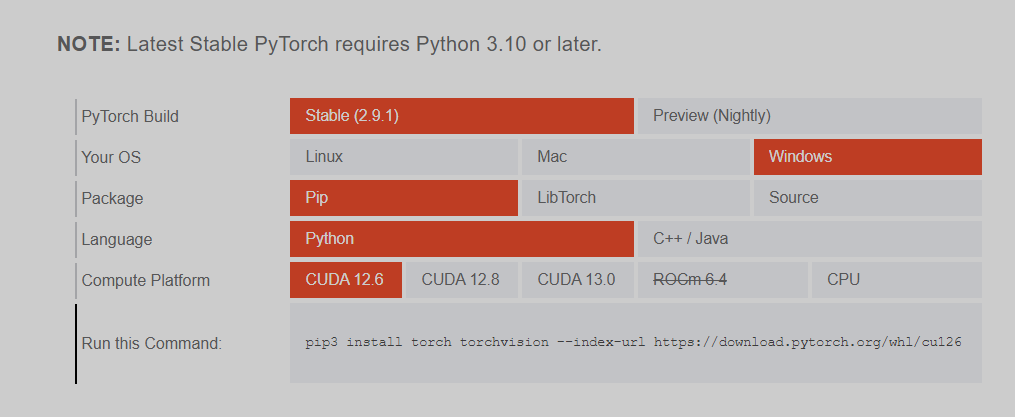
3查看 自己电脑 支持的cuda :nvidia-smi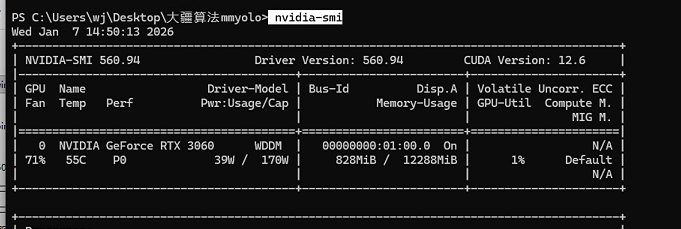
4最后然后下载合适的 cuda:https://developer.nvidia.com/cuda-toolkit-archive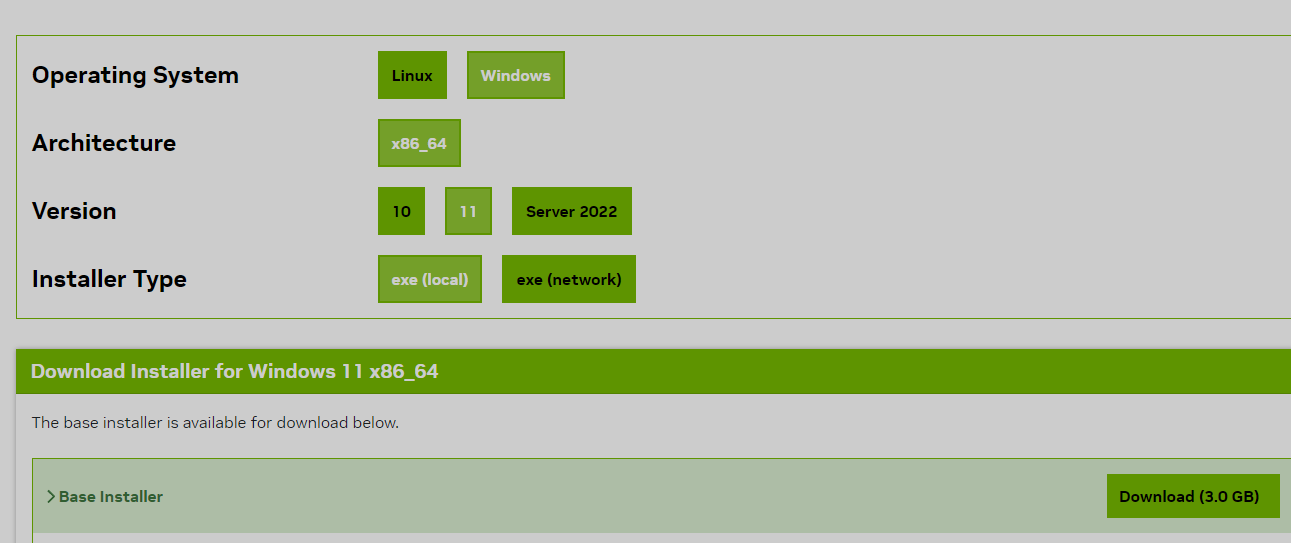
如有问题 参考:https://zhuanlan.zhihu.com/p/23464877518
5下载python 版本
推荐 3.10
https://www.python.org/downloads/windows/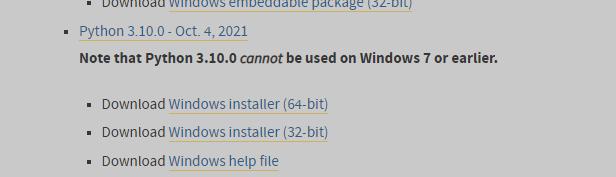
6下载anaconda :https://www.anaconda.com/download-success
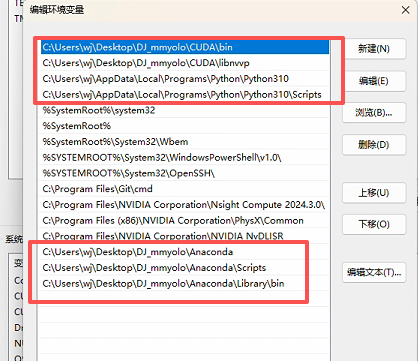
7最终环境配置:
简单 anaconda 命令大全
电脑终端中
初始化 conda init
-
查看 Conda 版本:conda --versiopythonn
-
更新 Conda:conda update conda
-
创建虚拟环境:conda create -n env_name python=3.8
-
查看所有虚拟环境:conda env list
-
激活虚拟环境:conda activate env_name
-
退出虚拟环境:conda deactivate
-
删除虚拟环境:conda remove --name env_name --all
步骤 1. 创建并激活一个 conda 环境。
conda create -n mmyolo python=3.10 -y conda activate mmyolo
步骤 2. 安装 PyTorch。指定了torch和cuda版本
pip3 install torch==2.0.0 torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
步骤 3. 验证 PyTorch 安装。正确的话,会打印版本信息和 True 字符
python -c "import torch; print(torch.__version__); print(torch.cuda.is_available())"
安装mmyolo
步骤 0. 使用 MIM 安装 MMEngine、 MMCV 和 MMDetection 。
pip install fsspec sympy==1.13.1 pip install -U openmim mim install "mmengine>=0.6.0" mim install "mmcv>=2.0.0rc4,<2.1.0" mim install "mmdet>=3.0.0,<4.0.0"
步骤 1. 安装 MMYOLO
-
git clone --branch v0.6.0 https://github.com/open-mmlab/mmyolo.git cd mmyolo # Install albumentations mim install -r requirements/albu.txt # Install MMYOLO mim install -v -e . # "-v" 指详细说明,或更多的输出 # "-e" 表示在可编辑模式下安装项目,因此对代码所做的任何本地修改都会生效,从而无需重新安装。
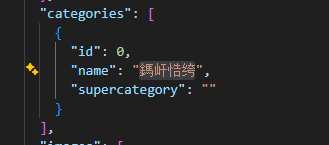
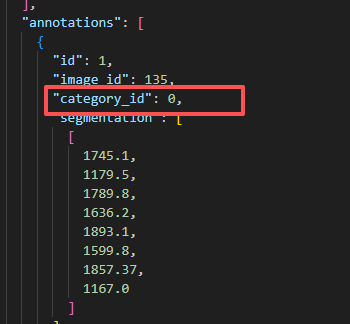
*这里 我电脑 3060显卡 cuda 12.6 python 3.10 遇到问题1:mim告警 那就不用mim 用pip 问题2 找不到PyTorch 那就修改setup 文件 把 注释掉 from torch.utils.cpp_extension import BuildExtension 修改 cmdclass={'build_ext': BuildExtension}, 为 cmdclass={'build_ext': lambda: type('BuildExtension', (), {'run': lambda self: None})}, 先把 001-NEW-ai-inside-init.patch 放在mmyolo文件下 git apply 0001-NEW-ai-inside-init.patch 让后修改 yolov8_s_syncbn_fast_8xb16-500e_coco.py 文件 路径放入正确的 训练 :用了几张卡 后面 0,1,2.... $env:CUDA_VISIBLE_DEVICES=0 python tools/train.py configs/yolov8/yolov8_s_syncbn_fast_8xb16-500e_coco.py 验证 标注与图像 python tools/analysis_tools/browse_coco_json.py --img-dir ./data/ceshi/images/Validation --ann-file ./data/ceshi/annotations/instances_Validation.json 提示 文件不是uf-8 python -c "import json; open('./data/ceshi/annotations/instances_Train.json', 'w', encoding='utf-8').write(open('./data/ceshi/annotations/instances_Train.json', 'r', encoding='gbk', errors='ignore').read()); print('文件编码已转换')" 有时候 从别的地方搞来的标注数据 id默认是从1开始的 需要修改为0
 对于单卡 训练 略微修改 yolov8_s_syncbn_fast_8xb16-500e_coco.py
对于单卡 训练 略微修改 yolov8_s_syncbn_fast_8xb16-500e_coco.py
_base_ = ['../_base_/default_runtime.py', '../_base_/det_p5_tta.py'] # ========================Frequently modified parameters====================== # -----data related----- data_root = './data/ceshi/' # 【必须修改】数据集的根目录路径,请改为你本地的实际路径 train_ann_file = 'annotations/instances_Train.json' # 训练集标注文件路径(相对于data_root) train_data_prefix = 'images/Train/' # 训练集图像文件路径前缀(相对于data_root) val_ann_file = 'annotations/instances_Validation.json' # 验证集标注文件路径 val_data_prefix = 'images/Validation/' # 验证集图像文件路径前缀 class_name=('拌合站',) num_classes = len(class_name) # Number of classes for classification # Batch size of a single GPU during training train_batch_size_per_gpu = 2 # Worker to pre-fetch data for each single GPU during training train_num_workers = 6 # persistent_workers must be False if num_workers is 0 persistent_workers = True # -----train val related----- # Base learning rate for optim_wrapper. Corresponding to 8xb16=64 bs # base_lr = 0.01 *(train_batch_size_per_gpu/128)------------------------------------- base_lr = 0.01 *(train_batch_size_per_gpu/64) max_epochs = 500 # Maximum training epochs # Disable mosaic augmentation for final 10 epochs (stage 2) close_mosaic_epochs = 10 model_test_cfg = dict( # The config of multi-label for multi-class prediction. multi_label=True, # The number of boxes before NMS nms_pre=30000, score_thr=0.001, # Threshold to filter out boxes. nms=dict(type='nms', iou_threshold=0.7), # NMS type and threshold max_per_img=300) # Max number of detections of each image # ========================Possible modified parameters======================== # -----data related----- img_scale = (960, 960) # width, height img_scale = tuple([x - x % 32 for x in img_scale]) # 强制对齐32倍数 # Dataset type, this will be used to define the dataset dataset_type = 'YOLOv5CocoDataset' # Batch size of a single GPU during validation val_batch_size_per_gpu = 1 # Worker to pre-fetch data for each single GPU during validation val_num_workers = 3 # Config of batch shapes. Only on val. # We tested YOLOv8-m will get 0.02 higher than not using it. # batch_shapes_cfg = None --------------------------------------------------------- # You can turn on `batch_shapes_cfg` by uncommenting the following lines. batch_shapes_cfg = dict( type='BatchShapePolicy', batch_size=val_batch_size_per_gpu, img_size=img_scale[0], # The image scale of padding should be divided by pad_size_divisor size_divisor=32, # Additional paddings for pixel scale extra_pad_ratio=0.0) #extra_pad_ratio=0.5) # 关闭额外填充,避免尺寸偏移 # -----model related----- # The scaling factor that controls the depth of the network structure deepen_factor = 0.33 # The scaling factor that controls the width of the network structure widen_factor = 0.5 # Strides of multi-scale prior box strides = [8, 16, 32] # The output channel of the last stage last_stage_out_channels = 1024 num_det_layers = 3 # The number of model output scales norm_cfg = dict(type='BN', momentum=0.03, eps=0.001) # Normalization config # -----train val related----- affine_scale = 0.5 # YOLOv5RandomAffine scaling ratio # YOLOv5RandomAffine aspect ratio of width and height thres to filter bboxes max_aspect_ratio = 100 tal_topk = 10 # Number of bbox selected in each level tal_alpha = 0.5 # A Hyper-parameter related to alignment_metrics tal_beta = 6.0 # A Hyper-parameter related to alignment_metrics # TODO: Automatically scale loss_weight based on number of detection layers loss_cls_weight = 0.5 loss_bbox_weight = 7.5 # Since the dfloss is implemented differently in the official # and mmdet, we're going to divide loss_weight by 4. loss_dfl_weight = 1.5 / 4 lr_factor = 0.01 # Learning rate scaling factor weight_decay = 0.0005 # Save model checkpoint and validation intervals in stage 1 save_epoch_intervals = 10 # validation intervals in stage 2 val_interval_stage2 = 1 # The maximum checkpoints to keep. max_keep_ckpts = 2 # Single-scale training is recommended to # be turned on, which can speed up training. env_cfg = dict(cudnn_benchmark=True) # ===============================Unmodified in most cases==================== model = dict( type='YOLODetector', data_preprocessor=dict( type='YOLOv5DetDataPreprocessor', mean=[128., 128., 128.], std=[128., 128., 128.], bgr_to_rgb=True), backbone=dict( type='YOLOv8CSPDarknet', arch='P5', last_stage_out_channels=last_stage_out_channels, deepen_factor=deepen_factor, widen_factor=widen_factor, norm_cfg=norm_cfg, act_cfg=dict(type='ReLU', inplace=True)), neck=dict( type='YOLOv8PAFPN', deepen_factor=deepen_factor, widen_factor=widen_factor, in_channels=[256, 512, last_stage_out_channels], out_channels=[256, 512, last_stage_out_channels], num_csp_blocks=3, norm_cfg=norm_cfg, act_cfg=dict(type='ReLU', inplace=True)), bbox_head=dict( type='YOLOv8Head', head_module=dict( type='YOLOv8HeadModule', num_classes=num_classes, in_channels=[256, 512, last_stage_out_channels], widen_factor=widen_factor, reg_max=16, norm_cfg=norm_cfg, act_cfg=dict(type='ReLU', inplace=True), featmap_strides=strides, skip_dfl=False), prior_generator=dict( type='mmdet.MlvlPointGenerator', offset=0.5, strides=strides), bbox_coder=dict(type='DistancePointBBoxCoder'), # scaled based on number of detection layers loss_cls=dict( type='mmdet.CrossEntropyLoss', use_sigmoid=True, reduction='none', loss_weight=loss_cls_weight), loss_bbox=dict( type='IoULoss', iou_mode='ciou', bbox_format='xyxy', reduction='mean', # reduction='sum',-- # 从sum改为mean----------------------------------------------------- loss_weight=loss_bbox_weight, return_iou=False), loss_dfl=dict( type='mmdet.DistributionFocalLoss', reduction='mean', loss_weight=loss_dfl_weight)), train_cfg=dict( assigner=dict( type='BatchTaskAlignedAssigner', num_classes=num_classes, use_ciou=True, topk=13, # 调整topk为YOLOv8默认值 # topk=tal_topk,---------------------------------------------- alpha=tal_alpha, beta=tal_beta, eps=1e-9)), test_cfg=model_test_cfg) albu_train_transforms = [ dict(type='Blur', p=0.01), dict(type='MedianBlur', p=0.01), dict(type='ToGray', p=0.01), dict(type='CLAHE', p=0.01) ] pre_transform = [ dict(type='LoadImageFromFile', backend_args=_base_.backend_args), dict(type='LoadAnnotations', with_bbox=True), ] last_transform = [ dict( type='mmdet.Albu', transforms=albu_train_transforms, bbox_params=dict( type='BboxParams', format='pascal_voc', label_fields=['gt_bboxes_labels', 'gt_ignore_flags']), keymap={ 'img': 'image', 'gt_bboxes': 'bboxes' }), dict(type='YOLOv5HSVRandomAug'), dict(type='mmdet.RandomFlip', prob=0.5), dict( type='mmdet.PackDetInputs', meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', 'flip', 'flip_direction')) ] train_pipeline = [ *pre_transform, dict( type='Mosaic', img_scale=img_scale, pad_val=114.0, pre_transform=pre_transform), dict( type='YOLOv5RandomAffine', max_rotate_degree=0.0, max_shear_degree=0.0, scaling_ratio_range=(1 - affine_scale, 1 + affine_scale), # scaling_ratio_range=(0.9, 1.1), # 缩小缩放范围---------------------------------- max_aspect_ratio=max_aspect_ratio, # img_scale is (width, height) border=(-img_scale[0] // 2, -img_scale[1] // 2), # border=(0, 0), # 替换原(-img_scale[0]//2, -img_scale[1]//2)----------------------------------- border_val=(114, 114, 114)), *last_transform ] train_pipeline_stage2 = [ *pre_transform, dict(type='YOLOv5KeepRatioResize', scale=img_scale), dict( type='LetterResize', scale=img_scale, # allow_scale_up=True, allow_scale_up=False, # 关闭向上缩放----------------------------- pad_val=dict(img=114.0) ), dict( type='YOLOv5RandomAffine', max_rotate_degree=0.0, max_shear_degree=0.0, scaling_ratio_range=(1 - affine_scale, 1 + affine_scale), # scaling_ratio_range=(0.9, 1.1), # 缩小缩放范围---------------------------------- max_aspect_ratio=max_aspect_ratio, # border=0, border_val=(114, 114, 114)), *last_transform ] train_dataloader = dict( batch_size=train_batch_size_per_gpu, num_workers=train_num_workers, persistent_workers=persistent_workers, pin_memory=True, sampler=dict(type='DefaultSampler', shuffle=True), collate_fn=dict(type='yolov5_collate'), dataset=dict( type=dataset_type, data_root=data_root, ann_file=train_ann_file, data_prefix=dict(img=train_data_prefix), filter_cfg=dict(filter_empty_gt=False, min_size=8), # filter_cfg=dict(filter_empty_gt=False, min_size=32),------------------------------------------- metainfo=dict(classes=class_name, palette=[(220, 20, 60)]), # 添加这一行 pipeline=train_pipeline)) test_pipeline = [ dict(type='LoadImageFromFile', backend_args=_base_.backend_args), dict(type='YOLOv5KeepRatioResize', scale=img_scale), dict( type='LetterResize', scale=img_scale, allow_scale_up=False, pad_val=dict(img=114), ), dict(type='LoadAnnotations', with_bbox=True, _scope_='mmdet'), dict( type='mmdet.PackDetInputs', meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape', 'scale_factor', 'pad_param')) ] val_dataloader = dict( batch_size=val_batch_size_per_gpu, num_workers=val_num_workers, persistent_workers=persistent_workers, pin_memory=True, drop_last=False, sampler=dict(type='DefaultSampler', shuffle=False), dataset=dict( type=dataset_type, data_root=data_root, test_mode=True, data_prefix=dict(img=val_data_prefix), ann_file=val_ann_file, metainfo=dict(classes=class_name, palette=[(220, 20, 60)]), # 添加这一行 pipeline=test_pipeline, batch_shapes_cfg=batch_shapes_cfg)) test_dataloader = val_dataloader param_scheduler = None optim_wrapper = dict( type='OptimWrapper', clip_grad=dict(max_norm=20.0),#---------------------10 optimizer=dict( type='SGD', lr=base_lr, momentum=0.937, weight_decay=weight_decay, nesterov=True, batch_size_per_gpu=train_batch_size_per_gpu), accumulative_counts=8, constructor='YOLOv5OptimizerConstructor') default_hooks = dict( param_scheduler=dict( type='YOLOv5ParamSchedulerHook', scheduler_type='linear', lr_factor=lr_factor, max_epochs=max_epochs), checkpoint=dict( type='CheckpointHook', interval=save_epoch_intervals, save_best='auto', max_keep_ckpts=max_keep_ckpts)) custom_hooks = [ dict( type='EMAHook', ema_type='ExpMomentumEMA', momentum=0.0001, update_buffers=True, strict_load=False, priority=49), dict( type='mmdet.PipelineSwitchHook', switch_epoch=max_epochs - close_mosaic_epochs, switch_pipeline=train_pipeline_stage2) ] val_evaluator = dict( type='mmdet.CocoMetric', proposal_nums=(100, 1, 10), ann_file=data_root + val_ann_file, metric='bbox') test_evaluator = val_evaluator train_cfg = dict( type='EpochBasedTrainLoop', max_epochs=max_epochs, val_interval=save_epoch_intervals, dynamic_intervals=[((max_epochs - close_mosaic_epochs), val_interval_stage2)]) val_cfg = dict(type='ValLoop') test_cfg = dict(type='TestLoop')训练参数说明:
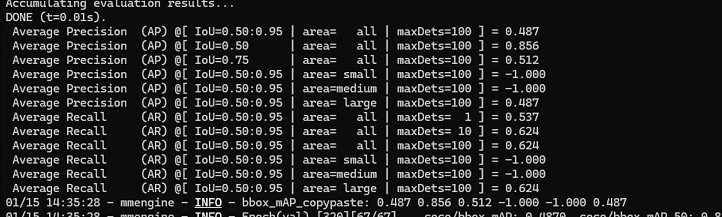
第一部分:平均精度 (Average Precision, AP)
这部分衡量模型预测的“准不准”。IoU(交并比)是预测框与真实框的重叠度,阈值越高要求越严。 -
AP @ IoU=0.50:0.95 | area=all: 0.487
核心综合指标。在IoU从0.5到0.95(步长0.05)的多个严格标准下的平均精度。0.487是一个尚可但不算优秀的分数,说明模型整体有较大提升空间。 -
AP @ IoU=0.50: 0.856
宽松标准下的精度。当只要求预测框与真实框有50%重叠时,模型准确率高达85.6%,说明它能“找到”目标,但框得不一定准。 -
AP @ IoU=0.75: 0.512
严格标准下的精度。当要求重叠度达到75%时,精度大幅下降至51.2%。这直接说明模型的定位精度不足,预测框不够贴合。 -
AP (Small/Medium/Large): -1.000, -1.000, 0.487
关键诊断点。模型在小目标和中等目标上的精度为-1.000,意味着完全没有做出任何有效检测。而大目标AP为0.487,与总AP相同,证实了当前模型只对大目标有效。
第二部分:平均召回率 (Average Recall, AR)
这部分衡量模型“找得全不全”,即在固定最大检测数量下,能找回多少比例的真实目标。 -
AR @ maxDets=1, 10, 100: 0.537, 0.624, 0.624
随着允许检测的数量增加,召回率从53.7%升至62.4%后饱和。这意味着即使无限增加预测框,也只能找到约62%的目标,有近40%的目标(主要是中小目标)彻底遗漏。 -
AR (Small/Medium/Large): -1.000, -1.000, 0.624
再次确认了模型的缺陷:对中小目标的召回率为零,所有召回都来自大目标。
例如我的中小目标没有检测到 是因为我的标注数据本来就没有中小目标: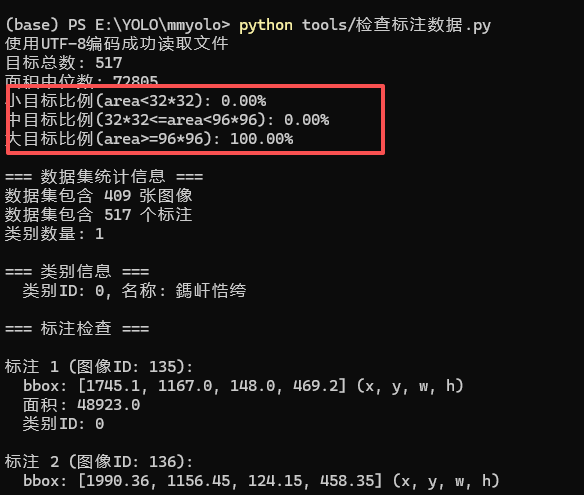
监测方法:import json import os import numpy as np # 方法1:使用正确的编码打开文件 def load_coco_annotations(file_path): with open(file_path, 'r', encoding='utf-8') as f: data = json.load(f) return data # 方法2:使用二进制模式读取,自动检测编码 def load_coco_annotations_binary(file_path): with open(file_path, 'rb') as f: content = f.read() # 尝试不同编码 try: return json.loads(content.decode('utf-8')) except UnicodeDecodeError: # 尝试其他编码 try: return json.loads(content.decode('gbk')) except UnicodeDecodeError: # 尝试utf-8-sig(带BOM的UTF-8) return json.loads(content.decode('utf-8-sig')) # 主程序 if __name__ == "__main__": annotation_file = 'data/ceshi/annotations/instances_Train.json' # 方法1:直接读取 try: coco_data = load_coco_annotations(annotation_file) print("使用UTF-8编码成功读取文件") except UnicodeDecodeError: print("UTF-8解码失败,尝试其他编码...") coco_data = load_coco_annotations_binary(annotation_file) print("使用备用编码成功读取文件") areas = [] for ann in coco_data['annotations']: w, h = ann['bbox'][2], ann['bbox'][3] area = w * h areas.append(area) areas = np.array(areas) print(f"目标总数: {len(areas)}") print(f"面积中位数: {np.median(areas):.0f}") print(f"小目标比例(area<32*32): {(areas < 1024).mean():.2%}") print(f"中目标比例(32*32<=area<96*96): {((areas >= 1024) & (areas < 9216)).mean():.2%}") print(f"大目标比例(area>=96*96): {(areas >= 9216).mean():.2%}") # 分析数据集 print(f"\n=== 数据集统计信息 ===") print(f"数据集包含 {len(coco_data['images'])} 张图像") print(f"数据集包含 {len(coco_data['annotations'])} 个标注") print(f"类别数量: {len(coco_data['categories'])}") # 打印类别信息 print("\n=== 类别信息 ===") for category in coco_data['categories']: print(f" 类别ID: {category['id']}, 名称: {category['name']}") # 检查标注的bbox是否有效 print("\n=== 标注检查 ===") invalid_bboxes = 0 zero_area = 0 for i, ann in enumerate(coco_data['annotations'][:10]): # 只检查前10个 bbox = ann['bbox'] # [x, y, width, height] area = ann['area'] print(f"\n标注 {i+1} (图像ID: {ann['image_id']}):") print(f" bbox: {bbox} (x, y, w, h)") print(f" 面积: {area}") print(f" 类别ID: {ann['category_id']}") # 检查bbox有效性 if bbox[2] <= 0 or bbox[3] <= 0: invalid_bboxes += 1 print(f" ⚠️ 警告: 无效bbox - 宽度或高度<=0") if area <= 0: zero_area += 1 print(f" ⚠️ 警告: 面积为0或负数") # 检查分割标注 print(f"\n=== 分割标注检查 ===") for i, ann in enumerate(coco_data['annotations'][:5]): # 只检查前5个 if 'segmentation' in ann: seg = ann['segmentation'] if seg and len(seg) > 0: print(f"标注 {i+1}: 分割点数量: {len(seg[0]) // 2}") else: print(f"标注 {i+1}: 无有效分割标注") # 图像尺寸统计 print(f"\n=== 图像尺寸统计 ===") sizes = [] for img in coco_data['images'][:10]: # 只检查前10个 sizes.append((img['width'], img['height'])) print(f"图像 {img['file_name']}: {img['width']}x{img['height']}") print(f"\n=== 汇总 ===") print(f"无效bbox数量: {invalid_bboxes}") print(f"零面积标注数量: {zero_area}") # 检查标注与图像的对应关系 print(f"\n=== 标注-图像对应关系 ===") image_ids = [img['id'] for img in coco_data['images']] ann_image_ids = [ann['image_id'] for ann in coco_data['annotations']] unmatched = [img_id for img_id in ann_image_ids if img_id not in image_ids] if unmatched: print(f"警告: 有 {len(set(unmatched))} 个标注对应的图像ID在图像列表中不存在") else: print("所有标注都有对应的图像")测试:
python tools/test.py configs/yolov8/yolov8_s_syncbn_fast_8xb16-500e_coco.py work_dirs/yolov8_s_syncbn_fast_8xb16-500e_coco/best_coco_bbox_mAP_epoch_50.pth

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)