人形机器人介绍和发展历程
人形机器人作为人工智能与机械工程融合的创新产物,正迎来快速发展阶段。其核心特征包括拟人智能、类人形态和广泛适用性,通过模仿人类外观和行为,能够快速适应各类环境。目前发展经历了萌芽探索、集成发展、高动态发展到智能化四个阶段,技术路线从机械控制转向AI赋能。按形态可分为轮式、半身足式和全能型三类,应用场景涵盖工业、医疗、教育、家庭服务等多个领域。随着AI大模型技术进步,人形机器人正从简单重复劳动向复杂
人形机器人作为未来产业的重要赛道,是科技自立自强的标志型成果,是人工智能、机械工程、电子工程等领域融合创新的典范,也是实现新质生产力的最佳手段之一。人形机器人凭借其类人的感知交互能力、肢体结构和运动方式,能够快速融入为人类设计的各种环境,未来有望在简单重复劳动和危险场景中替代人类,在复杂技能场景中辅助人类,在商业和家庭场景中服务人类。可以预见,未来人形机器人的广泛应用将深刻改变社会形态和人们的生产生活方式,已成为全球科技领域的发展热点。业界普遍认为,人形机器人未来有望成为继个人电脑、智能手机、新能源汽车后的新终端,形成新的万亿级市场。
一、人形机器人的内涵和发展历程
(一)人形机器人的内涵
人形机器人指模仿人类外观和行为,具备较高智能化水平的机器人。与传统工业机器人、服务机器人相比,人形机器人最大的特点在于其与人类相似的“肢体”结构、运动方式和感知方式,并在人工智能大模型的赋能下,从体能、技能、智能三个方面实现对人的模仿。
人形机器人具有拟人智能、类人形态和广泛适用三个特点。
一是拟人智能。一方面,人形机器人可以通过人工智能大模型技术的赋能,实现拟人化的感知、决策和控制能力;另一方面,人形机器人还可以通过云“大脑”和智能联网的方式,突破“一个躯体、一个大脑”的限制,实现算力和智能的跃升。
二是类人形态。人的形态是生物进化自然选择的结果,目前社会中的城市基础设施、生产生活所使用的工具和产品,基本均为人类形态设计。人形机器人通过对人类形态的高度模拟,能够快速融入为人类设计的各类环境中执行复杂任务,具有更强的通用性和环境适应性。
三是广泛适用。人形机器人具备比人类更强的耐受性和环境适应性,能够在非结构化环境中长期、低成本运行,有效缓解未来劳动力短缺问题,将在工业生产、民生服务、特种作业等领域实现广泛应用,并在部分领域展现出超越人类的优势。
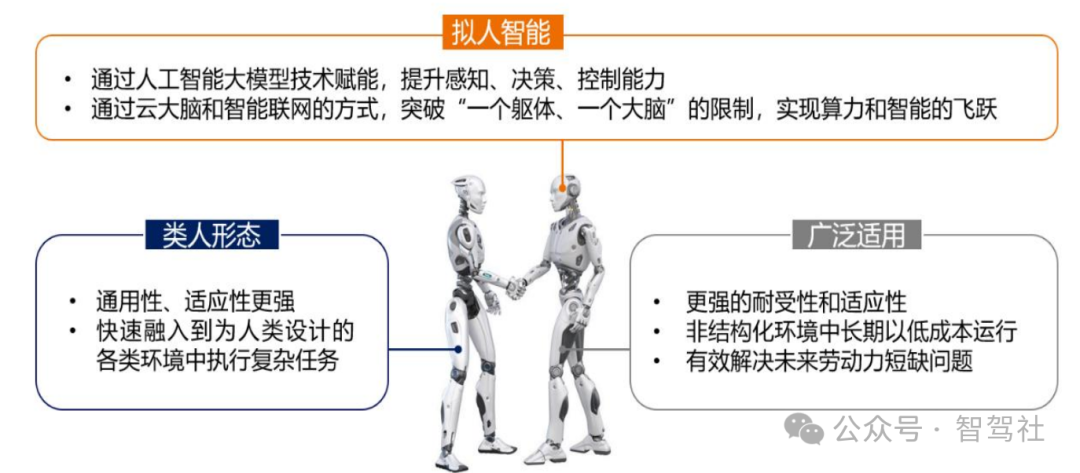
图 1 人形机器人的特点
从本质上看,对“人形”的追求,核心是机器人通用性问题,即是否有必要通过拟人化外形设计,使机器人具备接近人类的通用能力,是选择“一机多用”还是“专机专用”。从现阶段发展情况来看,人形机器人当前主要在工业场景中进行探索,相较于后期服务领域的复杂工作任务,工业场景任务重复性强、流程相对单一,对“完全人形”的需求并不迫切。
随着“大脑”能力逐步完善,具备高度通用能力的人形机器人将成为终极形态。但在此之前,不同技术路线和演进阶段的分支形态是必要的阶段性选择。“主体人形结构+定制化功能组件”的类人形方案,可能是实现商业化落地前的最优解。因此,从长期来看,“人形”是机器人的理想形态;从现实阶段看,完全意义上的“人形”并非唯一选择。
(二)人形机器人的分类
由于人形机器人的研发难度较高,企业在研发过程中,为加快功能开发与应用落地,往往采用反关节结构、轮式结构、轮腿结合结构以及两指或三指灵巧手等方式,替代完全拟人的机械结构,并实现部分拟人化功能。

图 2 人形机器人的分类(按形态划分)
按形态划分,目前主流的人形机器人可分为三类:
一是轮式人形机器人,主要采用轮式驱动方式,重点强调触觉传感器和灵巧手的操作能力;
二是半身足式人形机器人,重点强化腿部运动能力,手部主要用于保持平衡;
三是全能型人形机器人,具备双足、双臂、双手结构,集成多种感知能力和人工智能功能,能够适应开放环境中的多任务需求。
按具体应用场景和主要功能划分,人形机器人可分为以下类型:
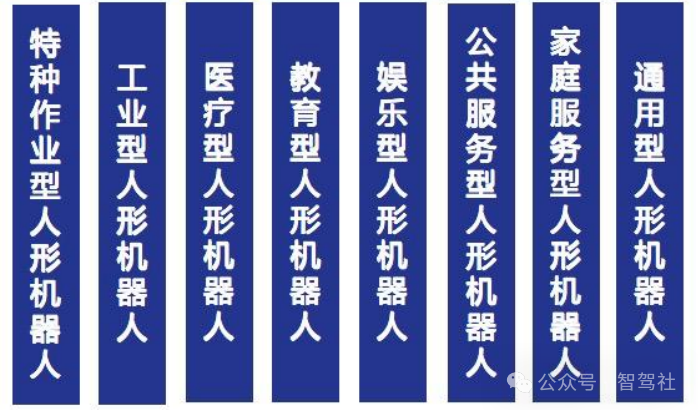
特种作业型人形机器人,用于巡逻巡检、灾害救援、危险作业等场景;
工业型人形机器人,用于工业生产和物流领域,如货物搬运、生产制造等;
医疗型人形机器人,用于辅助手术、诊断、康复等医疗任务;
教育型人形机器人,用于教学辅助和互动式学习;
娱乐型人形机器人,用于人机互动、陪伴和娱乐;
公共服务型人形机器人,用于酒店、餐厅、商场等公共场所服务;
家庭服务型人形机器人,用于家庭养老、育儿和家务劳动;
通用型人形机器人,可在工业、服务、教育、医疗等多个领域通用部署。
(三)人形机器人发展历程
总体来看,人形机器人的发展经历了萌芽探索阶段、集成发展阶段、高动态发展阶段和智能化发展阶段四个阶段。
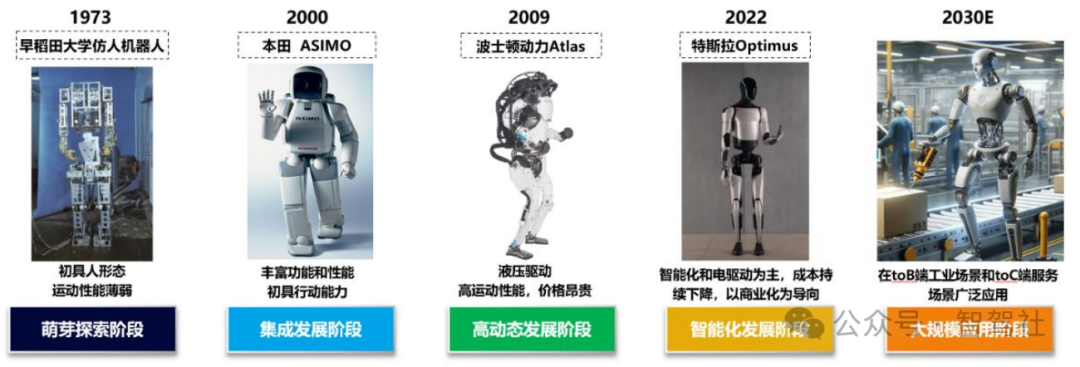
第一阶段为萌芽探索阶段(20世纪60年代末至90年代)。该阶段以实现基本的双足行走能力为核心目标。以日本早稻田大学为代表,先后研发了WAP、WL、WABIAN、WABOT等系列机器人。该阶段的主要特点是初步实现双足行走与基础控制能力,具备拟人化结构雏形,但整体运动能力有限。
第二阶段为集成发展阶段(本世纪初至2010年)。该阶段以感知与智能控制的初步集成为主要特征。本田公司的ASIMO系列机器人是该阶段的代表,通过感知系统与智能控制技术的融合,使机器人能够感知环境信息并进行简单决策与动作调整。其中,ASIMO 2000不仅具备类人外观,还能够预测未来动作并主动调整重心,实现转弯过程中的稳定行走。
第三阶段为高动态发展阶段(2010年至2022年)。随着控制理论和控制技术的进步,人形机器人的运动能力显著提升,能够稳定执行复杂动作。本田升级版ASIMO机器人采用电驱动技术路线,融合视觉与触觉识别技术,实现精细抓取和倒液体等操作。波士顿动力的ATLAS机器人采用液压驱动技术路线,在复杂环境中保持平衡并完成高动态动作,如跳跃、翻滚等。
第四阶段为智能化发展阶段(2022年至今)。在人工智能技术,尤其是大模型技术的赋能下,人形机器人在感知、交互和决策能力方面实现显著提升。电驱动逐步成为“肢体”主流技术路线,运动控制更加精准,研发迭代效率显著提高。以特斯拉Optimus机器人为代表,其基于人工智能和自研FSD芯片,通过端到端神经网络模型实现任务级和动作级决策,并具备复杂环境下对物体、人脸和手势的识别能力。同时,通过全身压力计算与实时反馈机制,使机器人运动更加自然、流畅。
总体来看,在潜在市场需求牵引和人工智能技术深度赋能的共同作用下,人形机器人已进入技术集中突破和应用初步试水的关键发展阶段。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 15
15 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)