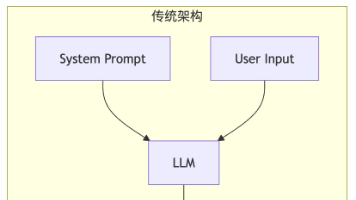
深入 ‘Steering the Agent’:利用输入反馈实时改变正在运行中的 Graph 权重,实现‘人机共驾’
例如,在自动驾驶中,驾驶员说“走这条路”、“避开那个路口”、“慢一点”。例如,用户点击“我喜欢这个结果”、“下次请优先考虑A选项”。例如,驾驶员手动干预方向盘、刹车,以纠正自动驾驶系统的行为。例如,传感器检测到前方有障碍物、交通灯变红、天气突变。例如,某个决策导致了错误、效率低下或安全风险。这些反馈携带着有价值的信息,指示着代理当前行为的“好”与“坏”,或指明了“期望”的方向。“Steering
尊敬的各位技术同仁,大家好!
今天,我们将深入探讨一个激动人心的主题——“Steering the Agent”,特别是如何利用实时输入反馈来动态调整正在运行中的图(Graph)的权重,最终实现真正意义上的“人机共驾”。这不仅仅是控制一个自动化系统,更是构建一个能够理解、适应并与人类意图协同工作的智能伙伴。
在许多高级自动化和人工智能应用中,我们常常面临一个核心挑战:如何让机器在保持其自主决策能力的同时,能够灵活地响应人类的指导、偏好乃至纠正?传统的预编程或离线训练模型在面对复杂、动态且需要人类直觉参与的场景时,往往显得僵硬。而“Steering the Agent”正是为了解决这一痛点而生。
第一章:人机共驾的愿景与“Steering the Agent”的核心理念
1.1 人机共驾:超越自动化
“人机共驾”不仅仅是人类操作机器,也不是机器完全取代人类,而是一种深度融合、优势互补的模式。它意味着:
- 共享控制权: 人类和机器在决策和执行层面都有影响力。
- 实时协作: 机器能够实时理解人类意图并调整自身行为。
- 相互学习: 机器通过与人类的互动不断改进,人类也能通过观察机器的行为获得洞察。
- 效率与安全兼顾: 机器的精确性、速度和不知疲倦与人类的直觉、经验和对复杂情境的理解相结合。
设想自动驾驶、智能制造、复杂任务规划、甚至个人助理系统,在这些场景中,纯粹的自动化可能无法满足所有需求,而纯粹的人工操作又效率低下。人机共驾提供了一个完美的折衷方案。
1.2 Steering the Agent:动态调整机器行为
“Steering the Agent”直译为“引导代理”,其核心思想是允许人类或其他系统在代理(Agent)运行时,通过提供实时反馈,动态地影响其内部决策机制,从而改变其行为。这种影响不是简单的开关或中断,而是一种精细的、连续的调整。
在我们的讨论中,这种“精细调整”将具体化为对代理内部决策图(Graph)的权重进行实时修改。图是一种强大的数据结构,能够表示复杂的决策路径、状态转换、任务依赖和策略选择。通过调整图的权重,我们可以:
- 改变路径偏好: 让代理更倾向于走某条路,或避免某条路。
- 修改任务优先级: 让代理优先完成某个子任务。
- 调整策略选择: 在多种可选策略中,让代理选择更符合人类意图的策略。
- 适应环境变化: 结合实时传感器数据和人类反馈,共同优化决策。
这种方法使得代理不仅能执行预设任务,还能在运行时接受“驾驶员”的指导,真正实现“共驾”。
第二章:图在代理决策中的基础作用
在深入探讨动态权重调整之前,我们首先需要理解为什么图是表示代理决策机制的理想选择。
2.1 代理决策的图表示
许多代理的决策过程都可以抽象为图结构:
- 节点(Nodes): 可以代表:
- 状态: 代理所处的环境状态(例如,自动驾驶中的“路口”、“高速公路”、“停车位”)。
- 动作: 代理可以执行的离散动作(例如,“左转”、“加速”、“拾取物品”)。
- 子目标/任务: 复杂任务分解后的中间目标。
- 概念/实体: 在知识图谱或语义理解中。
- 边(Edges): 可以代表:
- 状态转移: 从一个状态到另一个状态的可能路径。
- 动作执行后果: 执行某个动作后可能导致的状态变化。
- 依赖关系: 一个任务需要依赖另一个任务完成。
- 关联性/相似性: 节点之间的某种逻辑联系。
- 权重(Weights): 赋予边或节点的值,用于量化:
- 成本: 路径的代价(时间、资源消耗、风险)。
- 奖励: 达成某个状态或执行某个动作的回报。
- 概率: 状态转移的可能性。
- 优先级: 任务或动作的重要性。
- 偏好: 人类或其他系统对特定路径或动作的倾向性。
2.2 典型应用场景
| 场景 | 节点示例 | 边示例 | 权重示例 |
|---|---|---|---|
| 路径规划 | 地图上的交叉点/区域 | 两点间的道路 | 距离、时间、交通拥堵程度、道路类型 |
| 任务调度 | 任务 | 任务依赖关系 | 优先级、资源需求、完成时间 |
| 对话管理 | 对话状态、用户意图 | 状态转移、意图匹配 | 匹配度、响应优先级 |
| 机器人行为树 | 行为、条件 | 行为序列、选择 | 行为成功概率、执行代价 |
在这些场景中,代理通过遍历图、计算最佳路径或决策序列来执行任务。例如,路径规划中的Dijkstra或A*算法,其核心就是基于边的权重找到最低成本路径。
第三章:实时输入反馈与权重调整机制
现在,我们进入核心部分:如何利用实时输入反馈来动态改变这些权重。
3.1 什么是“输入反馈”?
“输入反馈”是一个广义概念,可以包括:
- 人类直接指令: 例如,在自动驾驶中,驾驶员说“走这条路”、“避开那个路口”、“慢一点”。
- 人类偏好表达: 例如,用户点击“我喜欢这个结果”、“下次请优先考虑A选项”。
- 人类纠正行为: 例如,驾驶员手动干预方向盘、刹车,以纠正自动驾驶系统的行为。
- 环境变化感知: 例如,传感器检测到前方有障碍物、交通灯变红、天气突变。
- 代理自身性能指标: 例如,某个决策导致了错误、效率低下或安全风险。
这些反馈携带着有价值的信息,指示着代理当前行为的“好”与“坏”,或指明了“期望”的方向。
3.2 实时权重调整的策略
将反馈转换为对图权重的修改,是实现“Steering the Agent”的关键。这里有几种常见的策略:
3.2.1 直接权重覆盖/增量调整
这是最直接的方式。人类可以直接指定某个边或节点的权重。
- 场景: 驾驶员直接指示“这条路是施工路段,权重设为无限大(禁止通行)”或“这条路风景好,权重降低50%(优先选择)”。
- 机制: 接收到指令后,系统直接修改图中对应边或节点的权重。对于增量调整,可以将反馈视为一个调整量,累加到现有权重上。
3.2.2 基于奖励/惩罚的强化学习启发式调整
将人类的“喜欢/不喜欢”、“正确/错误”视为强化学习中的奖励(Reward)或惩罚(Penalty)。
- 场景: 自动驾驶在某个路口选择左转,人类驾驶员感觉不适,轻轻摇头或发出“不”的指令。系统将此行为视为一个负面奖励,降低导致左转这条路径的权重。反之,如果驾驶员满意,则增加权重。
- 机制: 维护一个或多个学习率,根据反馈的强度和类型,对相关的边权重进行迭代式更新。这可能涉及到Q-learning、SARSA或更复杂的策略梯度方法,但在这里我们可以简化为基于启发式的权重增减。
3.2.3 基于上下文和规则的自适应调整
根据反馈和当前环境上下文,触发预设规则来调整权重。
- 场景: 自动驾驶在雨天行驶,驾驶员反馈“开慢点”。系统检测到“雨天”和“慢点”的反馈,触发规则:“在雨天且收到慢速指令时,降低所有高速行驶路径的权重,提高保守驾驶路径的权重”。
- 机制: 建立一个规则引擎,将反馈、环境状态作为输入,输出权重调整的指令。
3.2.4 学习自示范(Learning from Demonstration, LfD)
通过观察人类的操作示范,学习人类的偏好和策略,并将其内化为图的权重。
- 场景: 机器人学习如何组装零件。人类手动操作机器人完成组装过程,系统记录下人类操作的轨迹和决策点,并将这些轨迹对应的图路径权重提高。
- 机制: 记录人类在图上“走过”的路径,并显著增加这些路径上边的权重,使其在未来的决策中更具吸引力。
3.3 挑战与考量
- 实时性: 反馈必须被迅速处理和应用,否则代理的行为将滞后于人类意图。
- 稳定性: 权重的动态调整不能导致代理行为的剧烈震荡或不可预测性。可能需要平滑处理、限制调整幅度或使用指数移动平均等技术。
- 冲突解决: 当人类反馈与代理内部的安全约束、硬性规则或环境物理定律冲突时,如何处理?通常,硬性约束应具有最高优先级。
- 反馈粒度: 人类反馈可能是模糊的(例如“感觉不好”),也可能是精确的(“向左偏2度”)。系统需要能够处理不同粒度的反馈。
- 遗忘机制: 有些反馈可能是暂时的,当上下文改变时,旧的权重调整可能不再适用。需要考虑权重的衰减或重置机制。
- 可解释性: 为什么代理现在选择这条路径?当权重被动态修改后,代理的决策逻辑需要对人类保持一定的可解释性。
第四章:实现动态权重调整的系统架构
为了支持上述机制,我们需要一个具备实时反馈处理和图更新能力的系统架构。
4.1 核心组件
- 代理核心 (Agent Core / Graph Executor):
- 负责加载和维护代理的决策图。
- 根据当前图的权重和代理的目标,执行决策算法(如路径规划、任务选择)。
- 执行选定的动作,并感知环境变化。
- 反馈监听器 (Feedback Listener):
- 负责接收来自人类用户(通过UI、语音、手势等)或其他系统(传感器、监控)的实时反馈。
- 将原始反馈数据转换为结构化的反馈事件。
- 权重调整模块 (Weight Adjustment Module):
- 接收结构化的反馈事件和当前代理的状态。
- 根据预设的策略(直接调整、RL启发、规则等),计算出需要修改的图边/节点权重值。
- 处理冲突、平滑调整等逻辑。
- 图更新机制 (Graph Update Mechanism):
- 接收来自权重调整模块的新权重值。
- 原子性地更新代理核心中的决策图。
- 通知代理核心可能需要重新规划或重新评估当前决策。
- 用户接口 (User Interface, UI):
- 提供给人类用户与代理交互的界面,包括:
- 显示代理当前状态和决策路径。
- 允许用户输入指令、表达偏好或进行纠正。
- 可视化权重变化(可选)。
- 提供给人类用户与代理交互的界面,包括:
4.2 数据流示意
+-------------------+ +---------------------+ +---------------------+
| 人类/环境输入 | ----> | 反馈监听器 | ----> | 权重调整模块 |
| (UI, 传感器, 语音) | | (解析, 结构化反馈) | | (策略计算新权重) |
+-------------------+ +---------------------+ +---------------------+
^ |
| v
+-------------------+ +---------------------+ +---------------------+
| 用户接口 | <---- | 代理核心 | <---- | 图更新机制 |
| (可视化, 交互) | | (图执行, 决策, 动作) | | (原子更新图权重) |
+-------------------+ +---------------------+ +---------------------+第五章:代码实现示例:一个简单的导航代理
让我们通过一个简化的Python代码示例来演示这个概念。我们将构建一个基于图的导航代理,它可以在一个网格世界中移动,并通过人类反馈实时调整路径偏好。
5.1 环境与图表示
我们使用 networkx 库来表示图。
import networkx as nx
import time
import threading
from collections import deque
# 1. 环境与图表示
class NavigationGraph:
def __init__(self, width, height):
self.width = width
self.height = height
self.graph = nx.grid_2d_graph(height, width) # 创建一个2D网格图
self._initialize_weights()
# 存储反馈的队列
self.feedback_queue = deque()
self.lock = threading.Lock()
def _initialize_weights(self):
# 初始化所有边的权重为1.0
for u, v in self.graph.edges():
self.graph[u][v]['weight'] = 1.0
def get_path(self, start, end):
"""
使用Dijkstra算法找到最短路径。
"""
try:
# 路径是节点列表
path = nx.dijkstra_path(self.graph, start, end, weight='weight')
path_cost = nx.dijkstra_path_length(self.graph, start, end, weight='weight')
return path, path_cost
except nx.NetworkXNoPath:
return [], float('inf')
def update_edge_weight(self, u, v, new_weight, smooth_factor=0.8):
"""
更新边的权重,并可选择进行平滑处理。
"""
with self.lock:
# 确保边是双向的,更新两个方向的权重
if self.graph.has_edge(u, v):
current_weight = self.graph[u][v]['weight']
# 平滑更新:新的权重是旧权重和新权重的加权平均
self.graph[u][v]['weight'] = current_weight * smooth_factor + new_weight * (1 - smooth_factor)
if self.graph.has_edge(v, u): # 假设是无向图
current_weight = self.graph[v][u]['weight']
self.graph[v][u]['weight'] = current_weight * smooth_factor + new_weight * (1 - smooth_factor)
print(f"DEBUG: Edge {u}-{v} weight updated to {self.graph[u][v]['weight']:.2f}")
def add_feedback(self, feedback_type, data):
"""
向反馈队列添加反馈。
"""
with self.lock:
self.feedback_queue.append((feedback_type, data))
def process_feedback(self, agent_current_path=None):
"""
处理队列中的所有反馈,并根据反馈调整图的权重。
"""
processed_count = 0
while True:
with self.lock:
if not self.feedback_queue:
break
feedback_type, data = self.feedback_queue.popleft()
processed_count += 1
print(f"nProcessing feedback: Type={feedback_type}, Data={data}")
if feedback_type == "AVOID_NODE":
# 人类反馈:避开某个节点
node_to_avoid = data
print(f"Agent received feedback: AVOID node {node_to_avoid}")
# 增加所有连接到该节点的边的权重,使其变得“昂贵”
for neighbor in self.graph.neighbors(node_to_avoid):
self.update_edge_weight(node_to_avoid, neighbor, 100.0, smooth_factor=0.9) # 权重设高
elif feedback_type == "PREFER_NODE":
# 人类反馈:偏好某个节点
node_to_prefer = data
print(f"Agent received feedback: PREFER node {node_to_prefer}")
# 降低所有连接到该节点的边的权重,使其变得“便宜”
for neighbor in self.graph.neighbors(node_to_prefer):
self.update_edge_weight(node_to_prefer, neighbor, 0.1, smooth_factor=0.9) # 权重设低
elif feedback_type == "DISLIKE_PATH_SEGMENT":
# 人类反馈:不喜欢代理刚刚走过的某一段路径
# 假设data是 (node1, node2)
if agent_current_path:
print(f"Agent received feedback: DISLIKE path segment {data}")
u, v = data
# 如果代理当前路径包含此段,则大幅增加其权重
if (u, v) in zip(agent_current_path, agent_current_path[1:]) or
(v, u) in zip(agent_current_path, agent_current_path[1:]): # 考虑双向
self.update_edge_weight(u, v, 5.0, smooth_factor=0.7) # 增加权重,惩罚
elif feedback_type == "LIKE_PATH_SEGMENT":
# 人类反馈:喜欢代理刚刚走过的某一段路径
# 假设data是 (node1, node2)
if agent_current_path:
print(f"Agent received feedback: LIKE path segment {data}")
u, v = data
if (u, v) in zip(agent_current_path, agent_current_path[1:]) or
(v, u) in zip(agent_current_path, agent_current_path[1:]):
self.update_edge_weight(u, v, 0.2, smooth_factor=0.7) # 降低权重,奖励
if processed_count > 0:
print(f"Processed {processed_count} feedback items.")
5.2 代理决策与执行
class Agent:
def __init__(self, nav_graph, start_node, end_node):
self.nav_graph = nav_graph
self.current_pos = start_node
self.target_pos = end_node
self.current_path = []
self.path_step_index = 0
self.is_active = True
def plan_path(self):
"""
根据当前图的权重重新规划路径。
"""
path, cost = self.nav_graph.get_path(self.current_pos, self.target_pos)
self.current_path = path
self.path_step_index = 0
print(f"Agent re-planned path: {self.current_path} with cost {cost:.2f}")
def execute_step(self):
"""
执行路径中的下一步。
"""
if not self.current_path or self.path_step_index >= len(self.current_path) - 1:
print(f"Agent has reached target {self.target_pos} or path is invalid.")
self.is_active = False
return False
next_node = self.current_path[self.path_step_index + 1]
previous_pos = self.current_pos
self.current_pos = next_node
self.path_step_index += 1
print(f"Agent moved from {previous_pos} to {self.current_pos}")
if self.current_pos == self.target_pos:
print(f"Agent successfully reached target {self.target_pos}!")
self.is_active = False
return False
return True
5.3 控制循环与反馈线程
def human_feedback_simulator(nav_graph, agent):
"""
模拟人类提供实时反馈。
"""
time.sleep(2) # 给人机启动时间
print("n--- Human Feedback Simulator Started ---")
# 第一次反馈:避免一个节点
nav_graph.add_feedback("AVOID_NODE", (1, 1))
time.sleep(3) # 等待代理处理并可能重新规划
# 第二次反馈:偏好一个节点
nav_graph.add_feedback("PREFER_NODE", (0, 2))
time.sleep(4)
# 第三次反馈:不喜欢代理走过的某一段路
# 假设代理可能在 (0,0) -> (0,1) -> (0,2) ... 走
# 我们可以模拟不喜欢 (0,1) -> (0,2) 这段
# 注意:这里需要根据代理实际路径来判断反馈是否有效
# 实际应用中,UI会捕获用户对实时路径的反馈
print("n--- Human Feedback Simulator Finished ---")
def main():
grid_width = 5
grid_height = 5
start_node = (0, 0)
end_node = (4, 4)
nav_graph = NavigationGraph(grid_width, grid_height)
agent = Agent(nav_graph, start_node, end_node)
# 启动人类反馈模拟器线程
feedback_thread = threading.Thread(target=human_feedback_simulator, args=(nav_graph, agent))
feedback_thread.start()
# 代理主循环
print("--- Agent Main Loop Started ---")
agent.plan_path() # 初始规划
while agent.is_active:
# 1. 代理执行一步
path_segment_taken = (agent.current_path[agent.path_step_index-1], agent.current_pos) if agent.path_step_index > 0 else None
if not agent.execute_step():
break # 代理已停止或到达目标
# 2. 代理处理所有待处理的反馈
# 在处理反馈时,代理需要知道它当前正在执行的路径,以便DISLIKE/LIKE反馈能作用于正确的边
nav_graph.process_feedback(agent_current_path=agent.current_path)
# 3. 如果处理了反馈,或者认为环境可能改变,重新规划路径
# 我们可以简单地在每次处理反馈后重新规划,或者设置一个更智能的条件
if nav_graph.feedback_queue: # 简单判断,如果还有反馈待处理,下次循环会继续处理
agent.plan_path() # 有新反馈,重新规划
time.sleep(1) # 模拟每秒移动一步
feedback_thread.join() # 等待反馈线程结束
print("--- Agent Main Loop Finished ---")
if __name__ == "__main__":
main()
5.4 运行与分析
运行上述代码,你将看到:
- 代理最初会规划一条最短路径(所有权重为1)。
- 人类反馈模拟器会陆续发出“AVOID_NODE”和“PREFER_NODE”指令。
nav_graph.process_feedback()会捕获这些指令,并根据指令动态调整图中相关边的权重。- “AVOID_NODE”会增加连接到该节点所有边的权重,使其变得“昂贵”。
- “PREFER_NODE”会降低连接到该节点所有边的权重,使其变得“便宜”。
- 在每次处理反馈后,代理会调用
agent.plan_path()重新规划路径。由于图的权重已经改变,代理将会选择一条新的、更符合人类偏好的路径。
例如,如果初始路径经过 (1,1),而人类反馈要避免 (1,1),那么代理在重新规划时会尝试绕开 (1,1)。如果人类反馈偏好 (0,2),代理会尝试让路径经过 (0,2) 且使其成本更低。
关键点:
- 分离关注点: 图的表示、路径规划、反馈监听、权重调整和代理执行是独立的模块。
- 线程安全: 使用
threading.Lock确保在并发访问图数据结构时(例如,代理读取路径,反馈线程更新权重)的安全性。 - 平滑更新:
smooth_factor参数使得权重调整不是突变的,而是渐进的,有助于系统的稳定性。 - 反馈粒度: 示例中展示了节点级别的偏好和路径段级别的偏好。实际应用中可以有更复杂的反馈类型。
第六章:高级考量与未来展望
6.1 权重融合与冲突管理
- 多源反馈融合: 当来自不同来源(驾驶员、乘客、环境传感器)的反馈同时到达时,如何融合这些信息?可以为不同来源的反馈赋予不同的信任度或优先级。
- 冲突解决机制: 当人类反馈与系统内部的硬性约束(如安全距离、法律法规)冲突时,硬性约束应始终占据优先地位。这需要在权重调整模块中实现严格的验证和优先级管理。
- 权重插值/平滑: 避免权重突然剧烈变化导致代理行为不稳定。除了代码中展示的平滑因子,还可以使用时间序列分析或滤波技术。
6.2 学习型权重调整
目前的示例是基于规则和启发式的。更高级的方法可以引入机器学习:
- 强化学习(RL): 将人类的“喜欢”/“不喜欢”作为奖励信号,让RL算法自动学习最优的权重调整策略。
- 模仿学习(Imitation Learning): 观察人类在特定情境下的操作,直接学习人类的策略或偏好,并将其映射到图的权重上。
- 元学习(Meta-Learning): 学习如何快速适应新的用户偏好或环境变化,而不是每次都从头开始学习。
6.3 可解释性与信任
当代理的行为因动态权重调整而改变时,人类可能会感到困惑:“它为什么这么做?”
- 解释性界面: UI应该能够可视化代理的决策过程,突出显示哪些边的权重被修改了,以及修改的原因(基于哪个反馈)。
- 信心度量: 代理可以报告其对当前决策的信心水平。当信心较低时,可能需要更多的人类介入或寻求澄清。
6.4 离线训练与在线适应的结合
理想的系统应该结合离线训练(学习普适知识)和在线适应(根据实时反馈调整)。离线训练可以提供一个高质量的初始权重集,而在线调整则允许代理在运行时微调这些权重以适应特定情境和用户。
6.5 应用场景的拓展
这种实时动态权重调整的范式不仅限于导航,还可以应用于:
- 智能家居: 用户通过语音或手势调整智能设备的优先级和联动规则。
- 医疗辅助: 医生根据病人实时状况调整AI诊断或治疗方案的权重。
- 教育推荐: 学生对课程内容的反馈实时影响推荐系统的权重,以提供更个性化的学习路径。
结语
“Steering the Agent”通过实时输入反馈动态调整图权重,为实现真正意义上的人机共驾提供了强大而灵活的机制。它使得智能系统不再是冰冷的执行者,而是能够理解、响应并与人类意图协同工作的智能伙伴。这不仅提升了自动化系统的适应性和鲁棒性,更重要的是,它增强了人类对智能系统的信任感和掌控感,开启了人机协作的全新篇章。随着人工智能技术的不断发展,我们有理由相信,这种深度融合的共驾模式将成为未来智能系统的主流。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 22
22 0
0- 0



 已为社区贡献48条内容
已为社区贡献48条内容

所有评论(0)