步态设计对四足机器人地形特性本体感觉感知的影响
25年9月来自MIT、USC和UPenn的论文“Effect of Gait Design on Proprioceptive Sensing of Terrain Properties in a Quadrupedal Robot”。原地机器人探测是增进对描述地球和其他行星体地质过程了解的重要工具。为了指导和改进这些移动实验室的运行,了解其环境的地面力学特性至关重要,尤其是在松散、可变形基底上行
25年9月来自MIT、USC和UPenn的论文“Effect of Gait Design on Proprioceptive Sensing of Terrain Properties in a Quadrupedal Robot”。
原地机器人探测是增进对描述地球和其他行星体地质过程了解的重要工具。为了指导和改进这些移动实验室的运行,了解其环境的地面力学特性至关重要,尤其是在松散、可变形基底上行走时。最近的研究表明,配备直驱和低传动比执行器的腿式机器人可以灵敏地检测外部力,因此有可能在运动过程中利用其腿部测量地形特性,从而提供前所未有的采样速度和密度,并能够进入以前因风险过高而无法采样的地形。本文探讨这些想法,研究步态对本体感觉地形感知精度的影响,特别是比较面向感知的步态,“爬行感知”(Crawl N’ Sense),与面向运动的步态,“小跑行走”(Trot-Walk)。其量化每种步态测量可变形基底强度和纹理的能力,方法是让机器人在由刚性表面、松散沙子和带有合成表面结皮的松散沙子组成的实验室横截面上行走。结果表明,无论是面向感知的爬行步态还是面向运动的小跑步态,机器人都能测量出低阻力基底和高阻力基底之间强度(以穿透阻力衡量)的显著差异;然而,面向运动的小跑步态的测量值幅度和方差更大。此外,较慢的爬行步态,检测表面结皮脆性断裂的精度显著高于较快的小跑步态。研究结果提供新的见解,可用于指导腿式机器人“运动控制中感知”步态的设计和规划,以便在其他星球上勘测地形并进行科学测量,从而增进对这些星球地质和形成的了解。
机器人探测在增进对地球和其他行星体的了解方面发挥着至关重要的作用,因为它能够远程进行原位实验 [1]。许多陆地和行星环境对传统的轮式漫游车构成严峻的挑战 [2],因为危险的地形限制其进入具有科学研究价值的区域。鉴于任务成本高昂且风险巨大,科学家必须规避风险,因此常常不得不放弃一些可能对机器人平台构成潜在威胁的科学探索机会。这部分是由于难以获取有关地表特性(例如风化层强度和纹理)的地面力学信息 [3],而这些信息在没有直接触觉反馈的情况下很难推断出来。
传统方法 [3] 需要专用的传感器,并且需要漫游车停下来进行测量,这导致数据采集稀疏且操作效率低下。
腿式机器人 [6]–[10] 提供一种替代的移动范式,可以扩展行星探测的作业范围。最近的研究表明,它们不仅能够穿越极端地形 [11]–[14],而且能够在行走时通过本体感觉“感知”地表相互作用,有效地充当贯入仪,使每一步都成为一次实验。执行器透明度和扭矩密度方面的最新进展使得在直驱(即无齿轮)[15] 和准直驱(QDD,即低齿轮比)机器人肢体中实现精确的力估计成为可能,这有望实现高密度地面反作用力测量 [12,16]。然而,大多数先前的工作都集中在静态或缓慢移动的测试设置上 [4,12,16]–[18]。本文探讨在腿式机器人运动过程中有效进行本体感觉地形感知的可能性。
如图所示:机器人腿可以作为有效的传感工具,用于地形估计和勘测。(A) 是一个腿式机器人测试台,使用直驱对称五杆连杆机构腿 [4] 作为穿透仪。(B) 是一个用于行走时进行感知的准直驱四足机器人。© 展示该四足机器人在模拟行星环境中行走并测量地形。(D) 显示美国宇航局“机遇号”火星车车轮在软土中的下沉情况 [5]。(E.1-E.3) 阐述以感知为导向和以运动为导向的步态之间的假设轴线——与速度相关——特别展示静止的机械腿、缓慢的“爬行感知”步态和“小跑-行走”步态。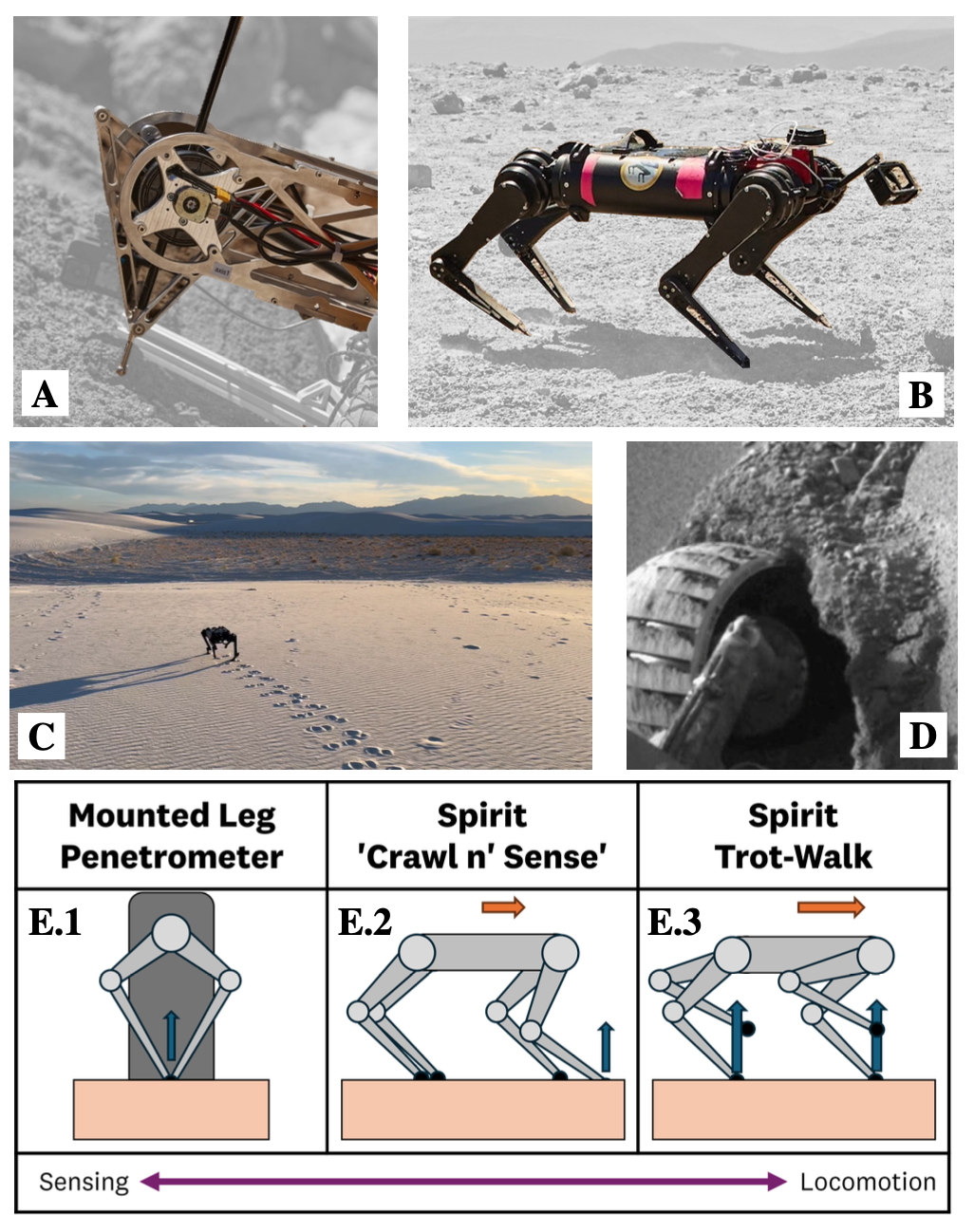
这种能力将使每一步都成为一次科学实验,显著提高岩土工程勘测和行星探测的密度和速度。从科学角度来看,这可以揭示地表特性的空间梯度[19]–[21],从而更深入地了解行星地表过程[12]。在操作层面,它可以为漫游车和宇航员的活动(例如挖掘、采样、导航[22]和建造[23])提供信息,从而增强任务规划。
为了实现这一目标,需要解决的一个关键问题是:步态设计如何影响本体感觉风化层传感的精度和覆盖范围?高速运动可以实现快速数据采集,但会引入复杂的风化层反作用力曲线[24],这会使信号解释复杂化,从而可能降低测量精度。相反,低速步态使脚步保持在准静态状态,可以提高力估计的置信度,但会限制空间覆盖范围。
为了回答这些问题,本研究探讨步态设计的变化如何影响QDD四足机器人测量地形特性(例如强度和纹理变化)的能力。在模拟环境中,使用安装腿部穿透仪的机器人,进行的野外实验表明,需要对地形强度进行灵敏、密集的测量。此外,开发一种定制的面向传感步态——“爬行感知”,并在实验室实验中将其与基线面向运动的步态——“小跑行走”进行比较。当机器人在不同地形上移动时,对本体感觉关节信号进行表征,并提出从这些信号中提取地形特性的方法,包括一种通过基于接触的校正方法,利用本体感觉估计软地形地面表面的方法。使用所提出的方法,系统地比较两种步态在传感精度方面的性能,包括(i)表征风化层强度和(ii)检测纹理和分层。
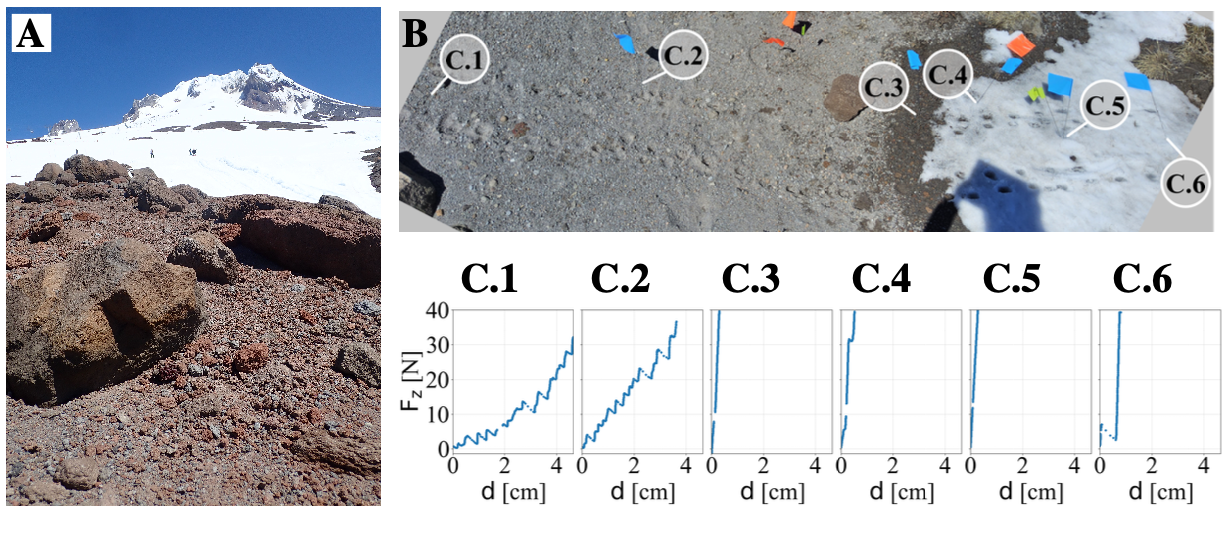
如图所示:(A) 在模拟行星环境(俄勒冈州胡德山)中,机器人腿辅助测量穿过雪层边界的原位穿透力剖面图;(B) 图为典型横截面图像,(C.1-6) 图显示使用机器人腿测试台在每个标记位置测得的力剖面图,C.1-2 为干燥疏松的表土,C.3 为潮湿表土,C.4-6 为覆盖着薄层积雪的表土;随着水分的增加,材料强度急剧增加,并且积雪中出现了明显的脆性断裂。
腿式机器人
用一台四足机器人(Ghost Robotics,Spirit 40)来研究步态效应。该机器人重 12 公斤,机身长 0.55 米。每条腿有 3 个自由度(外展、髋关节和膝关节)。四条腿的上肢和下肢连杆长度均为 20 厘米,末端为圆柱形脚趾(直径 4 厘米,宽度 2 厘米)。
所有三个腿部执行器均为准直驱式(即低速比)。外展和髋关节执行器的齿轮减速比为 6:1,膝关节的齿轮减速比为 12:1。这种较低的齿轮减速比使得执行器具有透明性 [8,26],这是使用测量的电机扭矩进行传感的必要条件,同时还能提供足够的扭矩以实现有效的运动。
执行器由电机驱动板(Ghost Robotics,Spirit 40 三通道电机驱动板)驱动。步态级控制代码在微控制器(Ghost Robotics,Spirit 40 主板)上以 1 kHz 的频率运行。计算模块(Nvidia,TX2)通过定制的 MavLink 协议向微控制器发送高级步态指令,记录低级数据,并通过机器人操作系统 2 (ROS2) [27] 消息协议与用户通信。
步态
为了研究步态设计,特别是运动速度对感知能力的影响,测试两种代表性步态:一种较慢的、针对感知优化的步态,称之为“爬行感知”,以及一种较快的、针对运动优化的步态,称之为“小跑行走”。通过比较这两种代表性步态的地形感知灵敏度和准确性,旨在了解步态设计如何在平衡运动速度和稳定性的同时影响感知性能。
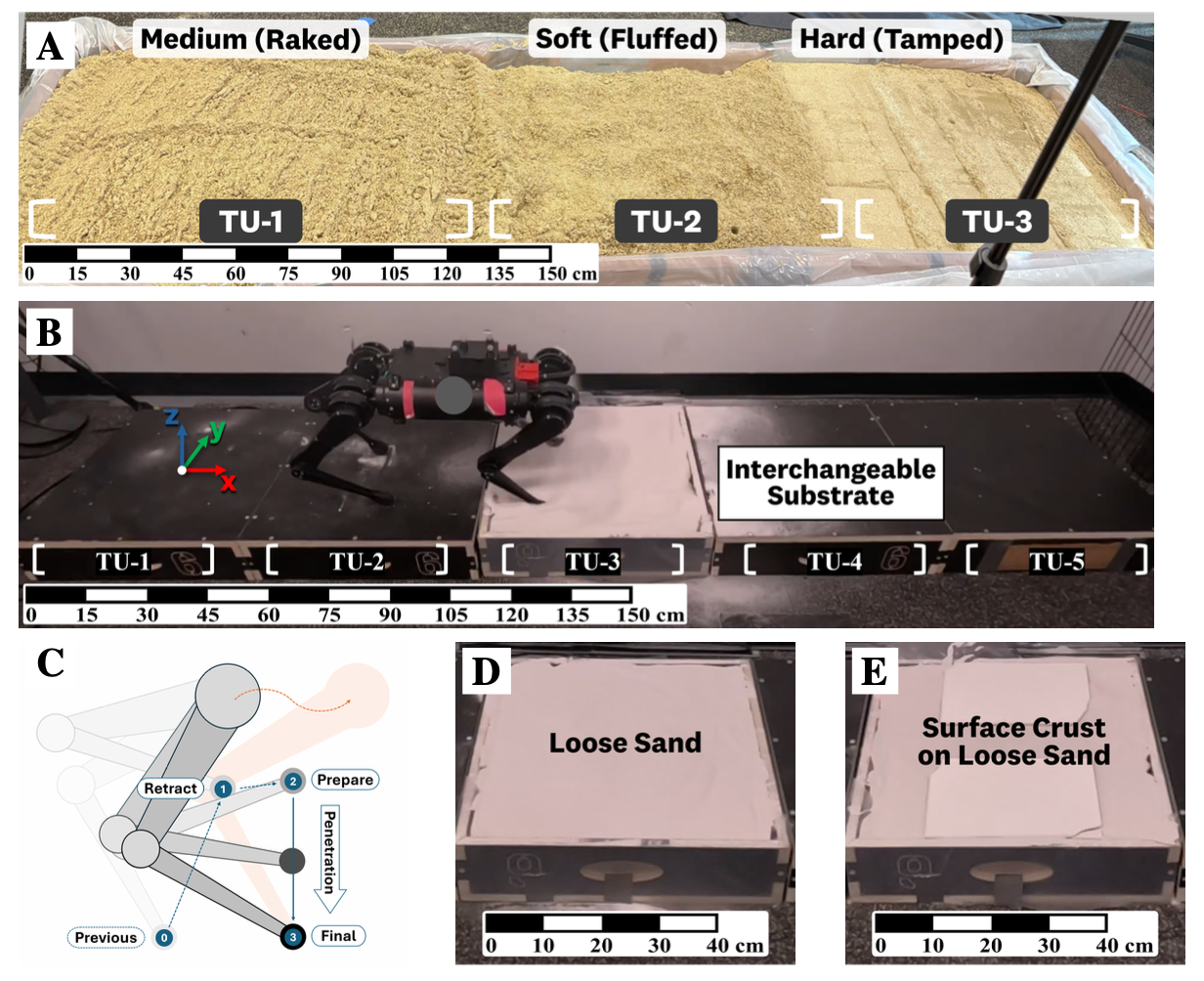
- 爬行感知:开发“爬行感知”步态,以优化可变形地形的感知精度。在“爬行感知”步态中,每一步包括两个阶段:“穿透(penetration)”阶段和“过渡(transition)”阶段。在穿透阶段,机器人保持三条腿的稳定三脚架姿态,而第四条腿充当“穿透仪”[28],以恒定速度垂直探测可变形基底。同时,记录电机位置和电流以计算地面反作用力。在过渡阶段,机器人向前移动其质心,并将其置于下一组支撑腿的支撑三角形上方,遵循[29]中描述的启发式方法。一旦质心到达所需位置,下一条穿透腿开始其循环:首先回旋并将其脚趾定位在目标穿透位置上方,然后向下穿透以启动下一个感知阶段。
在本研究中测试的所有“爬行感知”试验中,选择步幅频率为 0.05 Hz,步长为 10.5 cm,以实现高分辨率感知。所有其他步态参数,例如腿部回旋轨迹、最大步长和身体高度,都保持不变。此外,穿透速度保持较低且恒定(8.0 cm/s),以最大限度地提高穿透阶段的数据分辨率,同时最大限度地减少颗粒惯性效应[24,30,31]。
这种步态设计的一个关键特征是故意将穿透、回旋和身体过渡阶段分开。这种分离使机器人在单腿穿透过程中保持身体静止,而三条支撑腿抵消来自穿透脚趾的反作用力,从而提供额外的稳定性并减少感知噪声。
- 小跑步态:小跑步态是 Ghost Robotics SDK [32] 中的一种标准、以运动为导向的四足步态。在这种步态下,对角线上的两条腿同步移动,两对对角线腿交替进行支撑和摆动。这种小跑模式常见于四足动物 [33],并且是许多先进四足机器人中的基准步态 [8,34]。将这种以运动为导向的步态与以感知为导向的爬行感知步态进行比较,可以深入了解高效运动和精确地形感知之间的权衡。
小跑步态优先考虑运动效率和反应速度,而不是精确的力测量。与爬行感知步态不同,它不区分感知和运动阶段。相反,本体感觉主要用于检测地面接触,而无需明确计算可变形地形中的穿透深度。由于在任何给定时间只有两条腿接触地面,因此即使在坚硬的表面上,这种步态也会给准确估计地面平面带来额外的挑战。
在实验中,小跑步态的步频通过操纵杆手动控制,约为 2 Hz,实际范围为 [1,4] Hz。更高的步频导致穿透持续时间显著缩短(10-80 毫秒,而爬行感知步态为 1250 毫秒),从而导致用于估计基底强度的可用穿透力测量值更少。此外,小跑步态中更高的腿部着地速度会在颗粒介质中产生惯性效应 [24,35],从而产生非线性的、与冲击速度相关的地面反作用力。
可变形基底的地面平面估计
通常,在腿式机器人中,假设脚趾与地面之间的接触是刚性的且不可变形的。然而,在与可变形地形交互时,准确表征地形强度需要估计穿透深度,穿透深度定义为从基底表面到浸入地面的脚趾的垂直距离。用于估计地面表面、其法向量和初始接触点的方法,适用于两种步态,从而能够估计穿透深度:
-
爬行感知:用三个支撑脚趾的接触点来估计代表地面表面的平面,具体而言,该平面是拟合这三个点的平面,其法向量为 zˆ_G。
-
小跑-行走:两条腿在着地过程中会交替支撑,因此之前的方法不再适用。取而代之的是,地面平面估计算法使用动力学的数值积分来推算(时间上)前一步脚趾位置的估计值。然后,使用类似于[36]的方法——一种基于回归的扩展方法,利用当前和过去的脚趾位置(至少3个)进行地面平面估计——来计算地面平面。
-
利用接触信息校正地面平面坐标系:在可变形基底上,由于支撑腿的下沉,使用支撑脚趾高度进行地面平面估计通常不准确。对这种偏移进行校正,以提高穿透深度估计的准确性。具体来说,用地面平面法向量zˆ_G构建一个坐标系,其xy平面垂直于zˆ_G,原点是着地瞬间穿透脚趾的位置。对于爬行感知模式,该位置使用力阈值确定;对于小跑-行走模式,则通过手动后处理确定。通过使用此偏移量移动地面平面,可以将坐标系原点校正到与实际基底表面对齐。
实验设置和数据采集方案
为了评估机器人表征基底强度和破裂行为的能力,进行两组受控实验室实验。在第一个实验中,机器人穿越了不同压实度的沙地(如图 A)。在第二组实验中,机器人走过一小段带有地表结皮的沙地。这两组实验均使用 Crawl N’ Sense 和 Trot-Walk 两种步态进行,以评估步态设计如何影响传感性能。
-
实验 1:不同压实度的均质沙地:本实验的目的是评估每种步态在不同压实度下区分基底强度差异的能力。为此,准备三个不同压实度的均质湿沙地形单元(TU),以改变基底强度(如图 A)。TU 1 设置为中等压实度,TU 2 设置为低压实度,TU 3 设置为高压实度(如图 A)。中等压实度是通过用耙子松散和压平沙子制备的;高压实度是通过夯实制成的;低压实度是通过用耙子进一步蓬松沙子制成的1。这组实验共进行了八次试验,包括四次使用 Crawl N’ Sense 步态和四次使用 Trot-Walk 步态。
-
实验 2:检测结皮地形中的破裂:第二个实验的目的是评估机器人区分地表纹理突然变化的能力。在本实验中,TU 1、2、4 和 5 被配置为刚性(木质)表面,而 TU 3 则填充松散的沙子(300 微米海滩沙),并在其上覆盖了一层地表结皮(用 1:1.5 石膏粉与水制成的石膏瓷砖结皮替代物)(如图 B、D 和 E)。让机器人穿越该设置,以评估其检测步进过程中基底强度变化的能力——例如,异质表面与地下层,即沙子上的结皮。这组实验共进行七次试验,包括四次使用 Crawl N’ Sense 步态和三次使用 Trot-Walk 步态。在两组实验中,机器人的关节位置、速度和扭矩均以 1 kHz 的频率进行记录。为了获取机器人本体和脚趾相对于基底边界和表面的真实位置数据,搭建一个运动捕捉系统,该系统包含四台跟踪摄像机(OptiTrack Prime 13W)和两台彩色摄像机(OptiTrack Prime Color),所有摄像机均以 120 fps 的帧率运行。此外,还使用一台额外的摄像机(GoPro HERO 12,以 60 fps 的帧率录制)来拍摄更广阔的侧视图画面。通过整合惯性测量单元 (IMU) 的机载姿态估计数据和运动学模型,计算出脚趾的笛卡尔坐标位置、速度和受力。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 25
25 0
0- 0



 已为社区贡献164条内容
已为社区贡献164条内容

所有评论(0)