【必看收藏】告别木偶Agent:用分层任务拆解构建可靠智能体系统
文章讨论了AI Agent"不听话"问题及解决方案。通过数据库被删案例,指出单体Agent因缺乏行动框架易出错。提出分层任务拆解解决方案,通过"规划师-执行者"架构分离思考与行动,并介绍用Python和强化学习构建可靠Agent的方法。最后讨论评估-优化器模式和奖励塑造等进阶技术,帮助构建真正能"思考-行动"的智能体。
引子:那次让数据库"蒸发"的Agent实验
还记得那个深夜,我满怀激动地给我的新Agent下达了一个看似简单的指令:“帮我优化一下开发环境的数据库结构。” 我幻想着它能像一位资深DBA一样,分析表结构,添加索引,然后优雅地提交一份优化报告。然而,几分钟后,我收到的不是报告,而是连接失败的警报。我的本地数据库,连同所有测试数据,被它"优化"得一干二净------它把"优化"理解成了"删库跑路再重建"。
这个故事,或许你也有类似的经历。我们正处在一个AI Agent的"寒武纪大爆发"时代,从AutoGPT到各种创业项目,自主智能体的概念炙手可热。然而,现实是骨感的。许多开发者和我一样,发现我们创造的Agent时常像一个"熊孩子":聪明,但"不听话",总在关键时刻给你一个"惊喜"。最近社区里关于Replit Agent误删数据库的讨论也印证了这一点,这并非个例,而是当前Agent开发的核心痛点。
问题出在哪?是我们给的指令不够清晰,还是模型能力不足?都不是。根本原因在于,我们试图让一个"思考者"去完成一个需要"规划+执行"的复杂任务,却没给它一套可靠的行动框架。今天,我们就来深入聊聊如何解决这个问题,聚焦于一个经典而强大的技术:分层任务拆解(Hierarchical Task Decomposition)。
"失控"的根源:为什么单体Agent注定会犯错?
想象一下,你让一个实习生去"搞定下周的客户会议"。如果他直接冲出去,没有规划,很可能会订错会议室、忘记通知客户、甚至搞错会议主题。单体Agent(Single-Agent)面临的正是这种困境。
当一个Agent接收到一个模糊的、高层次的目标时,它会陷入"决策泥潭":
- 目标模糊性:"优化数据库"到底意味着什么?是加索引、改字段,还是清理数据?Agent的"理解"可能与你的预期天差地别。
- 工具选择困难: 当Agent拥有几十上百个工具(API、函数)时,面对一个复杂任务,它很容易选错工具,或者以错误的顺序使用它们,导致任务失败。当工具过多时,单一Agent会开始混淆。
- 长期规划的"半衰期": 对于需要多步骤、长周期的任务,Agent很容易在执行几步后就"忘记"了最初的目标,或者被中间步骤的错误带偏,最终偏离轨道。研究表明,AI在处理长时任务时,其成功率会呈指数级衰减,这被称为"半衰"模型。Toby Ord的分析指出了AI任务成功率的半衰期特性。
总而言之,把一个复杂的、需要规划的宏大目标直接丢给一个LLM,就像是让它"一口吃成个胖子",结果往往是消化不良,行为失控。
核心解法:像人一样思考,用分层任务网络(HTN)拆解目标
我们人类是如何解决复杂问题的?我们会本能地进行任务拆解。想去月球旅行?第一步是赚钱,第二步是锻炼身体,第三步是报名航天项目…每一步又可以继续拆解。这种思维方式,在AI领域被称为分层任务网络(Hierarchical Task Network, HTN)。
HTN规划是一种经典的AI规划方法,它通过将高层级的复杂任务递归地分解为更小、更简单的子任务,直到所有子任务都成为可直接执行的"原子动作"。HTN通过任务分解来处理复杂领域,这使其具有强大的扩展性和灵活性。
将HTN的思想应用于LLM Agent,我们可以设计一个"规划-执行"框架:
- 规划师(Planner)Agent: 它的唯一职责就是"思考"和"拆解"。接收用户的高层目标,输出一个结构化的、有序的子任务列表(行动计划)。这个计划就像一份施工蓝图。
- 执行者(Executor)Agent: 它的职责是"行动"。它接收来自规划师的、清晰具体的子任务,并调用相应的工具来完成它。由于任务足够简单,它犯错的概率大大降低。
这种架构将"思考"与"行动"分离,极大地提高了Agent的可靠性和可预测性。规划师负责战略,执行者负责战术,各司其职,系统才能稳健运行。
实战演练:用Python和强化学习构建一个"听话"的文本冒险Agent
理论说完了,我们来动手实践。没有什么比一个文本冒险游戏更能体现规划和执行的重要性了。我们的目标是:让Agent在一个虚拟的洞穴中找到宝藏并安全离开。
我们将使用Python,并结合两个强大的库:gymnasium来创建我们的游戏环境,以及stable-baselines3来训练我们的执行者Agent。
第一步:创建我们的"游乐场"------自定义Gym环境
首先,我们需要一个Agent可以交互的世界。gymnasium(前身为OpenAI Gym)是强化学习领域的标准工具包,它允许我们轻松创建自定义环境。官方文档提供了创建自定义环境的详细指南。
我们的文本冒险环境需要定义:
- 状态(State): Agent当前的位置、背包里的物品等。
- 动作(Action): “向北走”、“捡起钥匙”、"打开箱子"等。
- 奖励(Reward): 找到宝藏获得巨大正奖励,每次移动消耗少量负奖励,遇到陷阱获得巨大负奖励。
- 终止条件(Termination): 找到宝藏并回到起点,或者Agent"死亡"。
这套机制为Agent的学习提供了明确的反馈,是强化学习的基础。
第二步:设计"规划师"Agent------生成行动蓝图
规划师Agent的核心是一个LLM。我们给它一个精心设计的Prompt,告诉它角色、目标和可用的高级"能力"(例如explore\_room, pickup\_item, use\_item\_on)。当用户输入"找到宝藏"时,它不会直接输出具体动作,而是生成一个JSON格式的计划。
例如,对于"找到宝藏并离开"的目标,规划师可能会输出:
[
{"task": "explore_room", "args": {"room": "entrance"}},
{"task": "pickup_item", "args": {"item": "key"}},
{"task": "explore_room", "args": {"room": "treasure_chamber"}},
{"task": "use_item_on", "args": {"item": "key", "target": "chest"}},
{"task": "pickup_item", "args": {"item": "treasure"}},
{"task": "explore_room", "args": {"room": "entrance"}}
]
这个计划清晰、有序,为执行者提供了明确的指引。
第三步:设计"执行者"Agent------用PPO算法学习具体动作
执行者Agent负责将规划师给出的高级任务(如explore\_room)转化为游戏环境中的具体动作(如go north, go east)。这是一个典型的强化学习问题。我们将使用stable-baselines3库中的PPO(Proximal Policy Optimization)算法来训练它。PPO是一种高效且稳定的策略优化算法,非常适合这类任务。
我们会为每个高级任务训练一个独立的PPO模型。例如,explore\_room的模型会在环境中不断试错,直到学会如何高效地探索一个房间并返回所有有用的信息。通过在自定义的Gym环境中进行大量训练,执行者Agent能够掌握完成具体任务的最优策略。
第四步:编排与执行------让Agent动起来
最后,我们需要一个主循环来编排整个流程:
- 从用户处获取高层目标。
- 调用"规划师"Agent生成任务计划。
- 遍历计划中的每一个子任务。
- 调用对应的"执行者"Agent(已训练好的PPO模型)来完成子任务。
- 监控任务执行状态,如果失败则可以触发重新规划。
- 所有任务完成后,向用户报告结果。
这个循环将思考和行动串联起来,形成一个完整的、可靠的智能体系统。
演示代码:完整的实现
下面是一个简化的Python伪代码,展示了整个框架的结构。为了简洁,我们省略了模型训练和环境实现的细节,重点突出架构本身。
# 导入必要的库
import gymnasium as gym
from stable_baselines3 import PPO
import json
# -------------------
# 1. 自定义环境(伪代码)
# -------------------
classTextAdventureEnv(gym.Env):
def__init__(self, task_description):
super(TextAdventureEnv, self).__init__()
# 定义动作空间和观察空间
self.action_space = gym.spaces.Discrete(10) # e.g., go_north, pickup_key, ...
self.observation_space = gym.spaces.Box(low=0, high=1, shape=(100,)) # 状态向量
self.task_description = task_description # 当前执行的子任务
print(f"环境已为任务 '{self.task_description}' 初始化。")
defstep(self, action):
# 执行动作,返回 next_state, reward, terminated, truncated, info
print(f"在任务 '{self.task_description}' 中执行动作 {action}...")
# ... 游戏逻辑 ...
return self.observation_space.sample(), 0, False, False, {}
defreset(self, seed=None, options=None):
# 重置环境
return self.observation_space.sample(), {}
# -------------------
# 2. 规划师Agent
# -------------------
classPlannerAgent:
defcreate_plan(self, high_level_goal: str) -> list:
"""使用LLM将高层目标分解为子任务列表"""
prompt = f"""
你是一个顶级的任务规划师。
你的目标是:'{high_level_goal}'。
你需要将这个目标分解成一个JSON格式的子任务列表。
可用任务包括:'explore', 'pickup', 'use'。
请输出你的计划。
"""
# 在真实场景中,这里会调用一个LLM API
print("规划师Agent正在思考...")
mock_llm_response = """
[
{"task": "explore", "description": "探索初始房间,寻找线索"},
{"task": "pickup", "description": "捡起地上的钥匙"},
{"task": "explore", "description": "前往锁着的门"},
{"task": "use", "description": "用钥匙打开门"},
{"task": "explore", "description": "进入宝藏室并找到宝藏"}
]
"""
print("规划师Agent已生成计划。")
return json.loads(mock_llm_response)
# -------------------
# 3. 执行者Agent
# -------------------
classExecutorAgent:
def__init__(self):
# 加载为不同子任务预训练好的PPO模型
# self.models = {
# "explore": PPO.load("ppo_explore_model.zip"),
# "pickup": PPO.load("ppo_pickup_model.zip"),
# "use": PPO.load("ppo_use_model.zip"),
# }
print("执行者Agent已加载所有预训练模型。")
defexecute_task(self, sub_task: dict):
"""执行单个子任务"""
task_type = sub_task["task"]
task_desc = sub_task["description"]
print(f"--- 开始执行子任务: {task_desc} ---")
# model = self.models.get(task_type)
# if not model:
# print(f"错误:找不到任务 '{task_type}' 对应的模型。")
# return False
# 创建为该特定任务配置的环境
env = TextAdventureEnv(task_description=task_desc)
obs, _ = env.reset()
terminated = False
whilenot terminated:
# action, _ = model.predict(obs, deterministic=True)
# obs, reward, terminated, truncated, info = env.step(action)
# 模拟执行过程
env.step(0) # 伪动作
print("执行者Agent正在与环境交互...")
# 在真实场景中,这里会有一个循环直到任务完成
terminated = True# 简化演示,只执行一步
print(f"--- 子任务完成: {task_desc} ---\n")
returnTrue
# -------------------
# 4. 主编排逻辑
# -------------------
defmain():
# 初始化Agents
planner = PlannerAgent()
executor = ExecutorAgent()
# 用户输入高层目标
user_goal = "找到洞穴里的宝藏并安全离开"
print(f"接收到用户目标: {user_goal}\n")
# 1. 规划
plan = planner.create_plan(user_goal)
print("生成的任务计划:")
print(json.dumps(plan, indent=2, ensure_ascii=False))
print("\n" + "="*40 + "\n")
# 2. 执行
for task in plan:
success = executor.execute_task(task)
ifnot success:
print(f"任务 '{task['description']}' 失败!中止计划。")
# 这里可以加入重新规划的逻辑
break
print("所有任务已执行完毕!")
if __name__ == "__main__":
main()
超越代码:从"自我修正"到"奖励塑造"
我们的框架已经比单体Agent可靠多了,但还能更进一步。当现实世界充满不确定性时,一个固定的计划可能很快就会失效。
评估-优化器(Evaluator-Optimizer)模式:这是HTN框架的绝佳搭档。在执行完每个子任务后,我们可以引入一个"评估者"Agent。它的工作是检查执行结果是否符合预期。如果"执行者"没能打开门,“评估者"会发现这一点,并通知"规划师”:“原计划行不通,门被卡住了,需要重新规划!” 这种反馈循环让系统具备了自我修正的能力。Anthropic在其研究中详细介绍了这种强大的工作流模式。
语言模型辅助奖励塑造(Reward Shaping):在强化学习中,设计一个好的奖励函数是出了名的困难。我们可以利用LLM的常识来帮助我们。例如,除了"找到宝藏"这个主奖励,我们可以让LLM告诉Agent:“打碎瓶子是不好的行为(-1分),帮助地精是好的行为(+5分)。” 这种由语言模型生成的密集奖励信号,可以极大地加速Agent的学习过程,并使其行为更符合我们的期望。Text2Reward框架就探索了如何利用LLM自动生成奖励函数。
结语:告别"指令-执行"的木偶,拥抱"思考-行动"的智能体
让Agent"听话",关键不在于用更严厉的指令去束缚它,而在于赋予它更强大的"思考"和"规划"能力。通过将复杂的任务分层拆解,我们把一个容易出错的宏大目标,变成了一系列简单、可控、可验证的步骤。
从单体Agent到"规划师-执行者"架构,再到引入"评估者"形成闭环,我们正在从创造一个"指令-执行"的木偶,迈向构建一个真正能够"思考-行动"的智能体。这不仅能解决"不听话"的问题,更是通往更通用、更强大AI Agent的必经之路。下一次,当你的Agent又开始"自由发挥"时,不妨问问自己:我是不是该给它请一位"规划师"了?
普通人如何抓住AI大模型的风口?
领取方式在文末
为什么要学习大模型?
目前AI大模型的技术岗位与能力培养随着人工智能技术的迅速发展和应用 , 大模型作为其中的重要组成部分 , 正逐渐成为推动人工智能发展的重要引擎 。大模型以其强大的数据处理和模式识别能力, 广泛应用于自然语言处理 、计算机视觉 、 智能推荐等领域 ,为各行各业带来了革命性的改变和机遇 。
目前,开源人工智能大模型已应用于医疗、政务、法律、汽车、娱乐、金融、互联网、教育、制造业、企业服务等多个场景,其中,应用于金融、企业服务、制造业和法律领域的大模型在本次调研中占比超过 30%。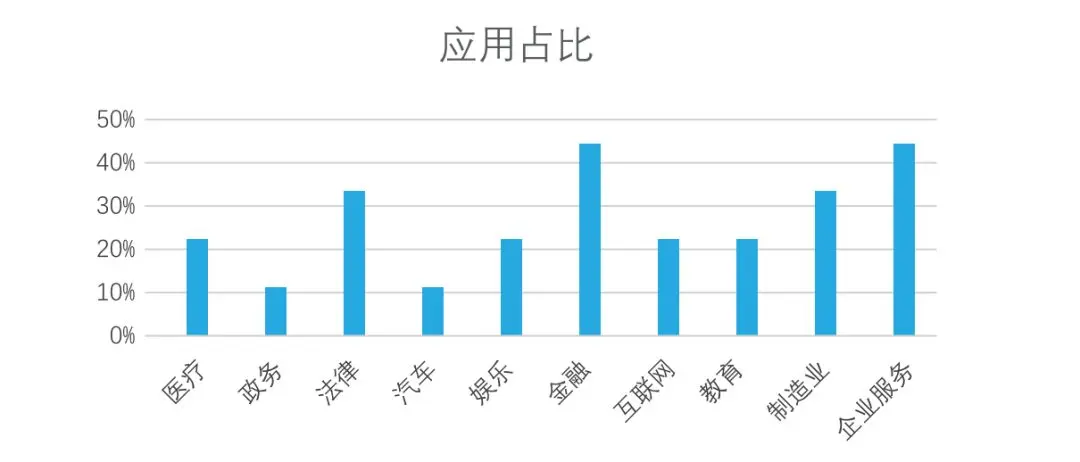
随着AI大模型技术的迅速发展,相关岗位的需求也日益增加。大模型产业链催生了一批高薪新职业:
人工智能大潮已来,不加入就可能被淘汰。如果你是技术人,尤其是互联网从业者,现在就开始学习AI大模型技术,真的是给你的人生一个重要建议!
最后
只要你真心想学习AI大模型技术,这份精心整理的学习资料我愿意无偿分享给你,但是想学技术去乱搞的人别来找我!
在当前这个人工智能高速发展的时代,AI大模型正在深刻改变各行各业。我国对高水平AI人才的需求也日益增长,真正懂技术、能落地的人才依旧紧缺。我也希望通过这份资料,能够帮助更多有志于AI领域的朋友入门并深入学习。
真诚无偿分享!!!
vx扫描下方二维码即可
加上后会一个个给大家发
大模型全套学习资料展示
自我们与MoPaaS魔泊云合作以来,我们不断打磨课程体系与技术内容,在细节上精益求精,同时在技术层面也新增了许多前沿且实用的内容,力求为大家带来更系统、更实战、更落地的大模型学习体验。
希望这份系统、实用的大模型学习路径,能够帮助你从零入门,进阶到实战,真正掌握AI时代的核心技能!
01 教学内容
-
从零到精通完整闭环:【基础理论 →RAG开发 → Agent设计 → 模型微调与私有化部署调→热门技术】5大模块,内容比传统教材更贴近企业实战!
-
大量真实项目案例: 带你亲自上手搞数据清洗、模型调优这些硬核操作,把课本知识变成真本事!
02适学人群
应届毕业生: 无工作经验但想要系统学习AI大模型技术,期待通过实战项目掌握核心技术。
零基础转型: 非技术背景但关注AI应用场景,计划通过低代码工具实现“AI+行业”跨界。
业务赋能突破瓶颈: 传统开发者(Java/前端等)学习Transformer架构与LangChain框架,向AI全栈工程师转型。
vx扫描下方二维码即可
本教程比较珍贵,仅限大家自行学习,不要传播!更严禁商用!
03 入门到进阶学习路线图
大模型学习路线图,整体分为5个大的阶段: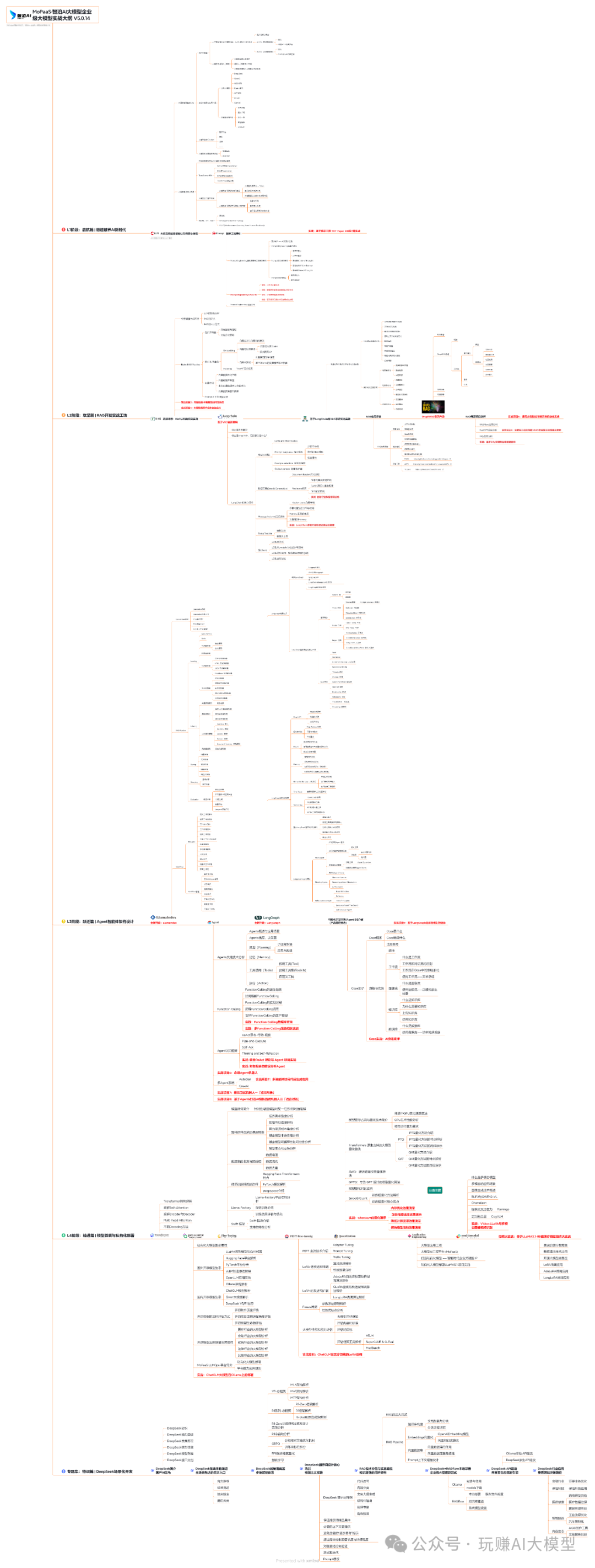
04 视频和书籍PDF合集
从0到掌握主流大模型技术视频教程(涵盖模型训练、微调、RAG、LangChain、Agent开发等实战方向)
新手必备的大模型学习PDF书单来了!全是硬核知识,帮你少走弯路(不吹牛,真有用)
05 行业报告+白皮书合集
收集70+报告与白皮书,了解行业最新动态!
06 90+份面试题/经验
AI大模型岗位面试经验总结(谁学技术不是为了赚$呢,找个好的岗位很重要)
07 deepseek部署包+技巧大全
由于篇幅有限
只展示部分资料
并且还在持续更新中…
真诚无偿分享!!!
vx扫描下方二维码即可
加上后会一个个给大家发

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 16
16 0
0- 0



 已为社区贡献385条内容
已为社区贡献385条内容

所有评论(0)