Optimus狂奔充电,特斯拉选了哪种方式破解机器人能源困局?
其核心吸引力在于无接触带来的高可靠性和低维护成本,因其可实现非接触式、远距离无线充电,用户甚至没有感觉,也从物理结构上杜绝了电火花等有线充或接触式充电的安全隐患。在特斯拉近期新发布的视频中,Optimus人形机器人展示了流畅的慢跑能力,并在电量不足时自主导航到充电站,通过后置摄像头引导,独立完成充电枪对接。那么,这一选择背后是怎样的考量?充电方式的选择,最终决定了机器人是束缚在充电座上的工具,还是
一台人形机器人安静地跑向充电站,熟练地为自己插上充电枪——这不是科幻电影,而是特斯拉实验室里的日常。当行业还在争论哪种充电技术是未来时,特斯拉的Optimus似乎已经给出了它的答案。

在特斯拉近期新发布的视频中,Optimus人形机器人展示了流畅的慢跑能力,并在电量不足时自主导航到充电站,通过后置摄像头引导,独立完成充电枪对接。
这一场景直观地回答了特斯拉当前的充电方案选择。那么,这一选择背后是怎样的考量?随着Optimus即将大规模量产,未来的能源补给技术又会如何演变?
01 特斯拉的当前答案:自主接触式充电
根据近期发布的视频和报道,特斯拉为Optimus配备的是具备高度自主能力的接触式充电系统。
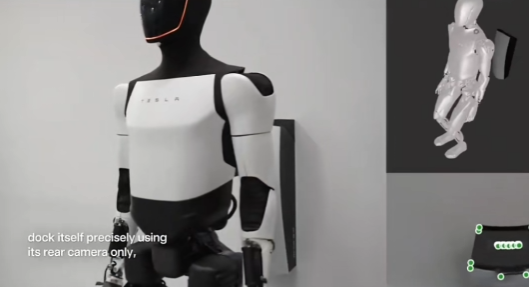
这项技术的核心流程是:当机器人电量低于设定阈值时,它会启动内置的视觉感知系统(后置摄像头),识别并导航至最近的充电站。
抵达后,通过力控传感器,准确地将充电接口与机身端口对接,整个过程无需人工干预。
特斯拉选择这一方案并非偶然,而是基于多重考量。直接高效的能源传输方式能够满足快速补能的需求,且能充分利用特斯拉在电动汽车领域积累的成熟技术。
更重要的是,高度自主性——机器人能自己完成充电——是实现其“24/7工作”愿景、减少人类干预的关键一步。
02 场景驱动:为什么Optimus“需要”这样充电?
充电方式的选择,根本上是由机器人的应用场景和物理特性决定的。
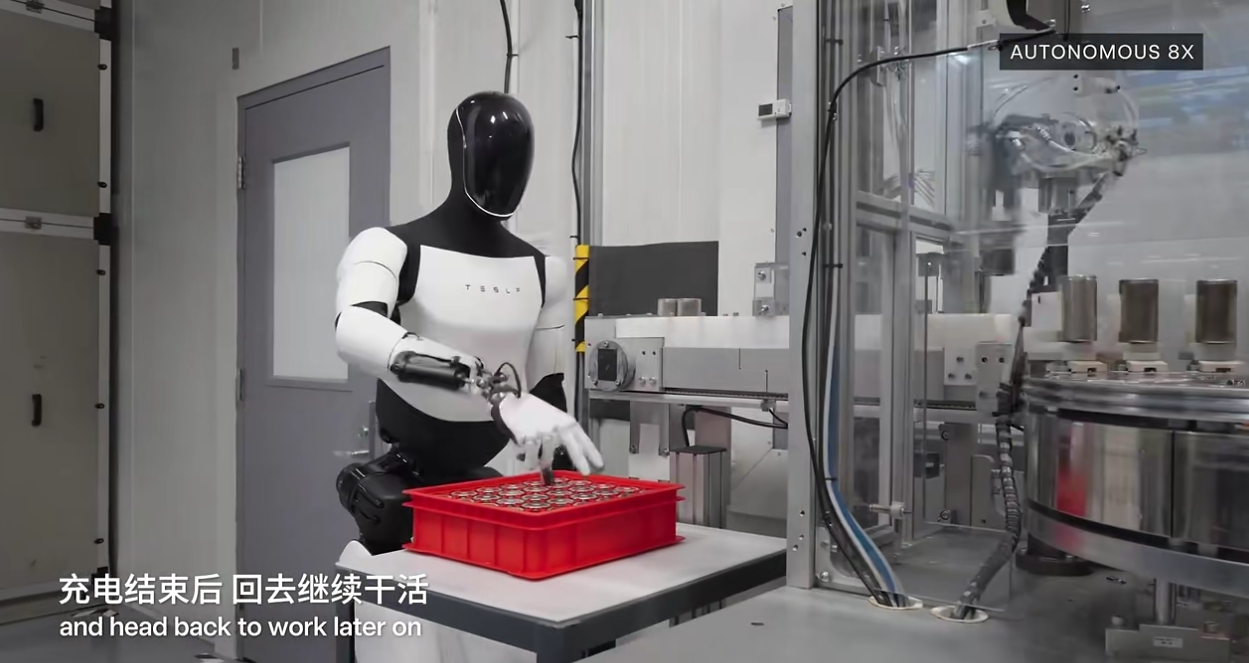
Optimus是一款定位为“通用”的人形机器人,其设计初衷是在复杂多变的人类环境中工作。无论是工厂车间、仓库、甚至是家庭客厅,它都需要像人类一样自由移动和操作。
这意味着它无法像传统AGV那样依赖嵌入地面的无线充电板,也不能承受因集中换电或快充而长时间中断任务。
延长续航的核心路径是提升电池性能。有消息称,Optimus B样机通过采用4680电池的“机器人专用版”和优化能效算法,已将续航提升至8小时。
然而,即便续航增长,能源补给问题依然存在。理想的方案,是在执行任务的间隙(如等待指令或短暂停顿时)进行碎片化补能,这要求充电过程必须灵活、快速且高度自动化。
03 技术权衡:四种方案的攻防战
站在行业层面,为机器人“加油”主要有四条技术路径。特斯拉的选择,是在具体约束下的最优解。
自主接触式充电是目前可见的解决方案。其优势在于技术相对成熟、能量传输效率高(95%以上),且较好匹配自主性要求。
劣势则是物理接口存在长期磨损和故障风险,在粉尘油污环境下需额外维护。
无线充电是备受关注的增长方向。其核心吸引力在于无接触带来的高可靠性和低维护成本,因其可实现非接触式、远距离无线充电,用户甚至没有感觉,也从物理结构上杜绝了电火花等有线充或接触式充电的安全隐患。Wiferion、WiTricity、飞英思特等公司是该领域的代表。

但当前瓶颈也明显:系统成本较高,用户需要单独购买和安装无线充电桩。
换电模式,以秒级补能速度著称,是解决续航焦虑的激进方案。其挑战在于:需要建设专门的换电站,配备大量备用电池,基础设施投入巨大;且大容量电池本身沉重,对换电机械结构要求高。

超级快充则尝试用功率换取时间。其制约主要在于,对电池本身伤害较大,会显著缩短循环寿命;同时,超大功率对电网的冲击和建设成本也是难题。
04 未来猜想:V3版本与长期能源图景
随着Optimus V3版本计划在2026年初发布,并剑指年产百万台的目标,其能源补给方式也可能迎来迭代。
一个可能的短期演进方向,是优化现有接触式充电的体验和效率。例如,结合更强的AI视觉和力控技术,实现更精准、快速的对接。
更远期的未来,则可能与电池技术的根本性突破绑定。行业普遍将固态电池视为“理想方案”。
固态电池凭借更高的能量密度,有望显著延长单次充电后的工作时间;其固态电解质从根本上消除了液态电池的易燃风险,安全性大幅提升。
若固态电池实现商业化,配合无线充电技术,或许能为人形机器人带来更自由、更无缝的“无感补能”体验。
05 生态野心:不止于充电桩的选择
特斯拉对Optimus充电方式的选择,反映了其更宏大的战略意图。Optimus并非孤立的硬件产品,而是特斯拉人工智能与机器人生态系统的核心载体。
其自主充电能力,与特斯拉在自动驾驶领域的视觉感知、实时决策算法一脉相承。这不仅是技术复用,更是构建统一技术平台的体现。
从更广阔的视角看,未来机器人的能源管理将是一个涉及硬件、软件、基础设施和能源网络的复杂系统。
特斯拉可能构想的,是一个由智能机器人、云端AI和分布式能源网络组成的闭环:机器人既是能源消费者,也可能通过V2G技术成为小型分布式储能单元;云端智能则全局调度充电行为,优化能源使用效率。
当仓库中一排Optimus在完成夜间分拣后,列队走向充电站,各自完成补能,然后在黎明时分重新投入工作——这个宛如科幻电影的画面,正随着特斯拉的量产计划接近现实。
 充电方式的选择,最终决定了机器人是束缚在充电座上的工具,还是真正自主的智能体。特斯拉的当前答案清晰而务实,而其通向未来的蓝图,已然展开。
充电方式的选择,最终决定了机器人是束缚在充电座上的工具,还是真正自主的智能体。特斯拉的当前答案清晰而务实,而其通向未来的蓝图,已然展开。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)