多智能体系统分布式一致性(新添加事件触发):共5个仿真代码及文献参考学习(包括[1]分布式有限...
多智能体系统分布式一致性(新添加事件触发)共5个仿真代码及对应文献参考学习[1]分布式有限时间异质多智能体系统一致性[2]异质多智能体系统固定时间跟踪[3]具有自适应动态协议的线性多智能体系统的分布式一致性[汽车]相关文献及仿真代码一步搞定分布式一致性控制的核心在于让多个智能体在有限时间内达成状态同步,而事件触发机制的出现,让系统摆脱了传统周期通信的束缚。今天咱们用几个仿真代码片段,拆解不同场景下
多智能体系统分布式一致性(新添加事件触发) 共5个仿真代码及对应文献参考学习 [1]分布式有限时间异质多智能体系统一致性 [2]异质多智能体系统固定时间跟踪 [3]具有自适应动态协议的线性多智能体系统的分布式一致性 [汽车]相关文献及仿真代码 一步搞定
多智能体系统一致性控制中的事件触发机制
分布式一致性控制的核心在于让多个智能体在有限时间内达成状态同步,而事件触发机制的出现,让系统摆脱了传统周期通信的束缚。今天咱们用几个仿真代码片段,拆解不同场景下的实现逻辑,顺便聊聊背后的设计思路。
1. 有限时间异质多智能体一致性
核心问题:异质系统(比如无人机和地面机器人混编)如何在有限时间内同步?
文献[1]提出了一种基于邻居误差的非线性控制协议,关键点在于设计触发条件,让智能体仅在误差超过阈值时才通信。
% 事件触发条件判断
function trigger = check_trigger(e_i, threshold)
if norm(e_i) > threshold
trigger = 1;
else
trigger = 0;
end
end
% 控制协议示例
u_i = -k * sign(sum(neighbor_errors)) * abs(sum(neighbor_errors))^alpha;代码要点:
alpha取值在(0,1)之间,通过非线性放大误差加速收敛;sign函数保证方向正确性,避免震荡;- 触发条件阈值通常与系统状态动态相关,而非固定值。
2. 固定时间跟踪控制
场景:领导-跟随者结构中,无论初始状态如何,跟随者必须在固定时间内跟踪领导者。
文献[2]的亮点是引入双幂次项,比如这样的控制律:
def control_input(x_i, x_leader, neighbors):
error = x_i - x_leader
for neighbor in neighbors:
error += (x_i - neighbor.x)
term1 = np.power(np.abs(error), 1.5)
term2 = np.power(np.abs(error), 0.5)
u = -K1 * term1 - K2 * term2
return u分析:
term1主导快速收敛,term2防止稳态抖动;- 固定时间与初始状态无关,适合对时间敏感的场景(如车载编队);
- 仿真时需要调整
K1和K2的比值,避免控制量饱和。
3. 自适应动态协议
痛点:传统协议需要全局图信息,实际中通信拓扑可能变化。
文献[3]的方案是让每个智能体动态调整自身控制增益:
% 自适应增益更新
gamma_dot = beta * (sum(neighbor_errors)^2 - sigma * gamma);
gamma = gamma + gamma_dot * dt;
% 协议实现
u_i = -gamma * sum(neighbor_errors);关键点:
beta和sigma决定增益调整速率;- 当邻居误差增大时,自动增强控制强度;
- 避免了手动调参,适合动态网络(比如临时断连)。
4. 汽车编队控制实例
应用场景:多辆自动驾驶汽车保持安全间距。文献[汽车]中采用的事件触发策略:
class Vehicle:
def update(self, leader_pos):
self.error = self.pos - leader_pos
if self._should_trigger():
self.broadcast_position()
self.control()
def _should_trigger(self):
return abs(self.error) > self.threshold * (1 + 0.1 * self.speed)设计细节:
- 触发条件与车速正相关——开得越快,触发越频繁;
- 广播时发送位置和速度信息,邻居车辆同步更新预测;
- 仿真中常加入延时补偿,模拟真实通信。
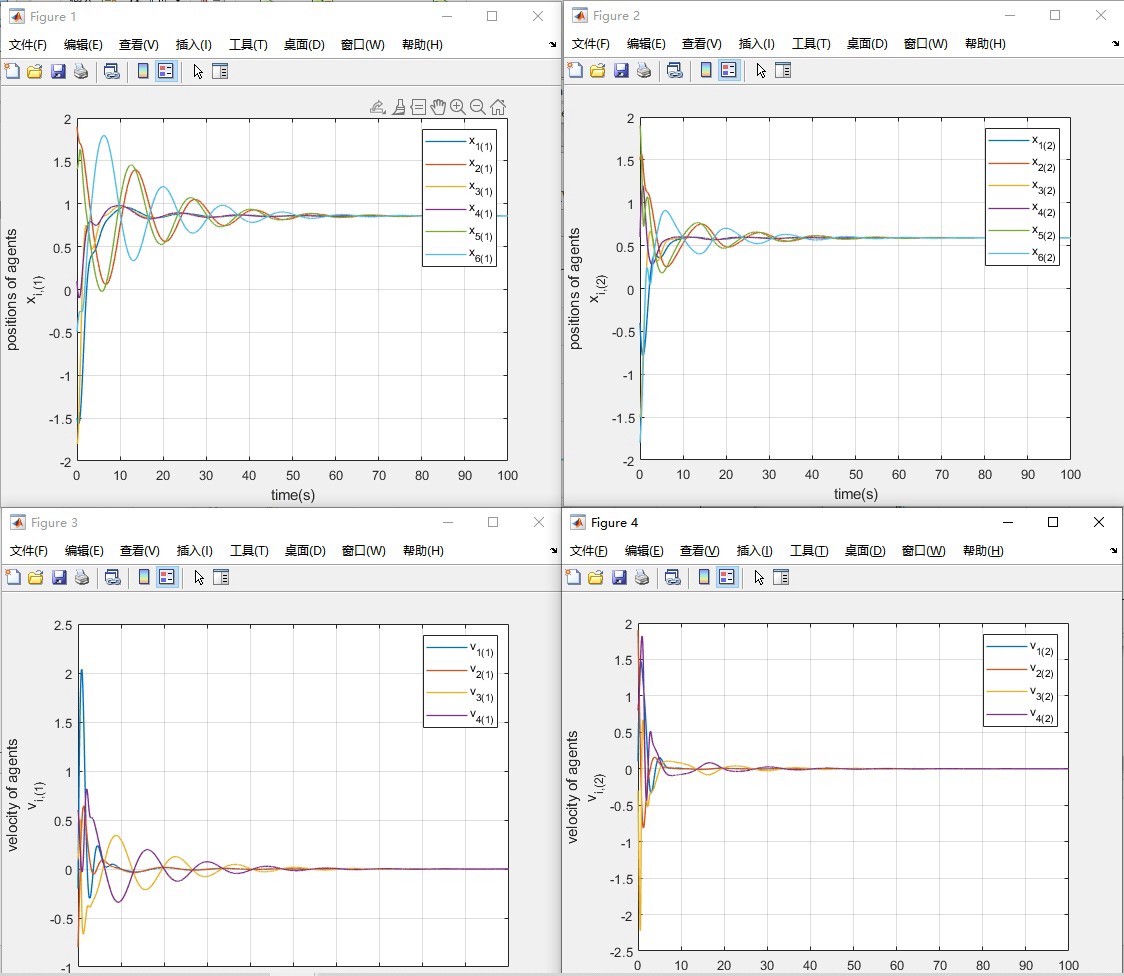
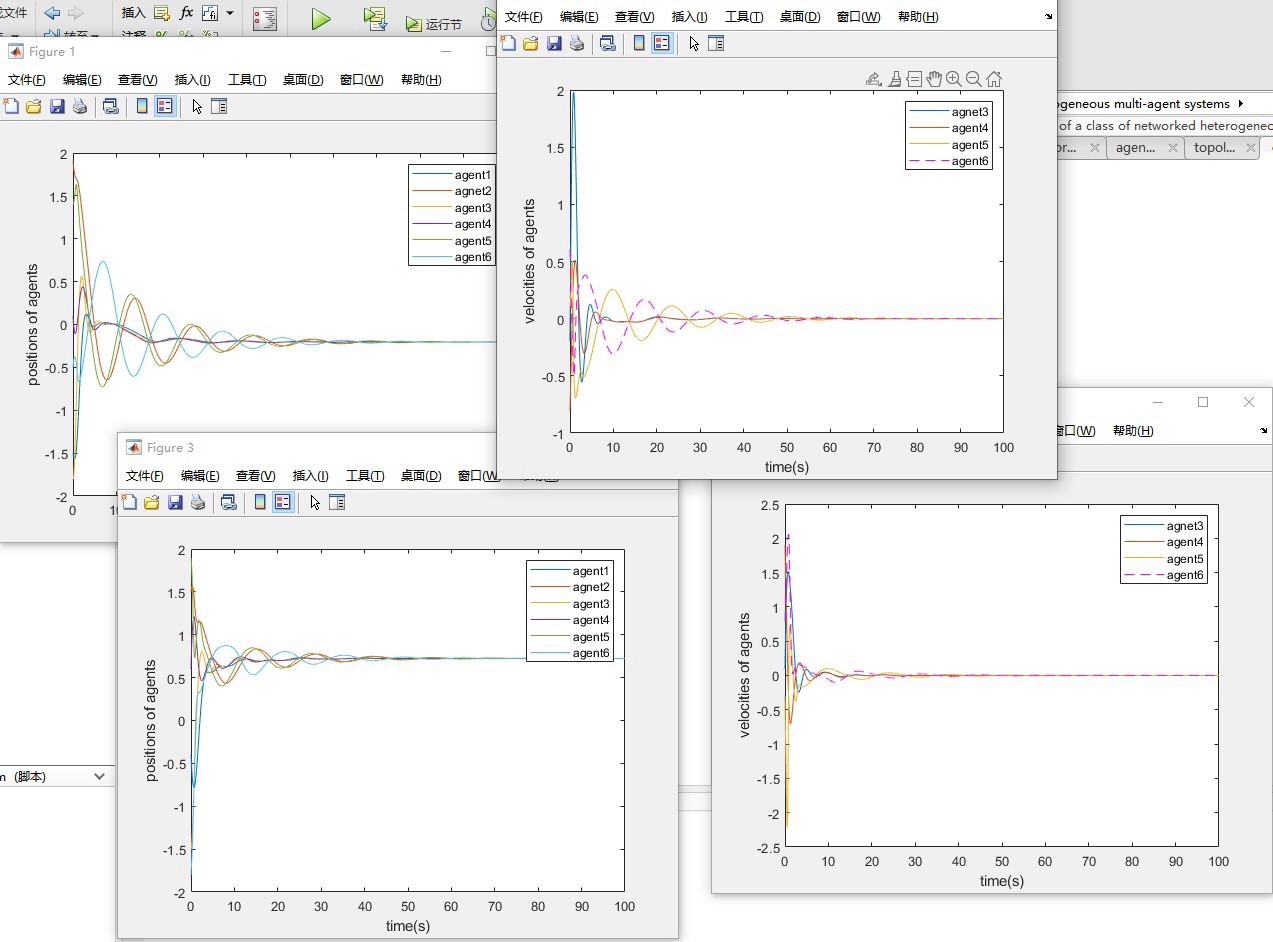
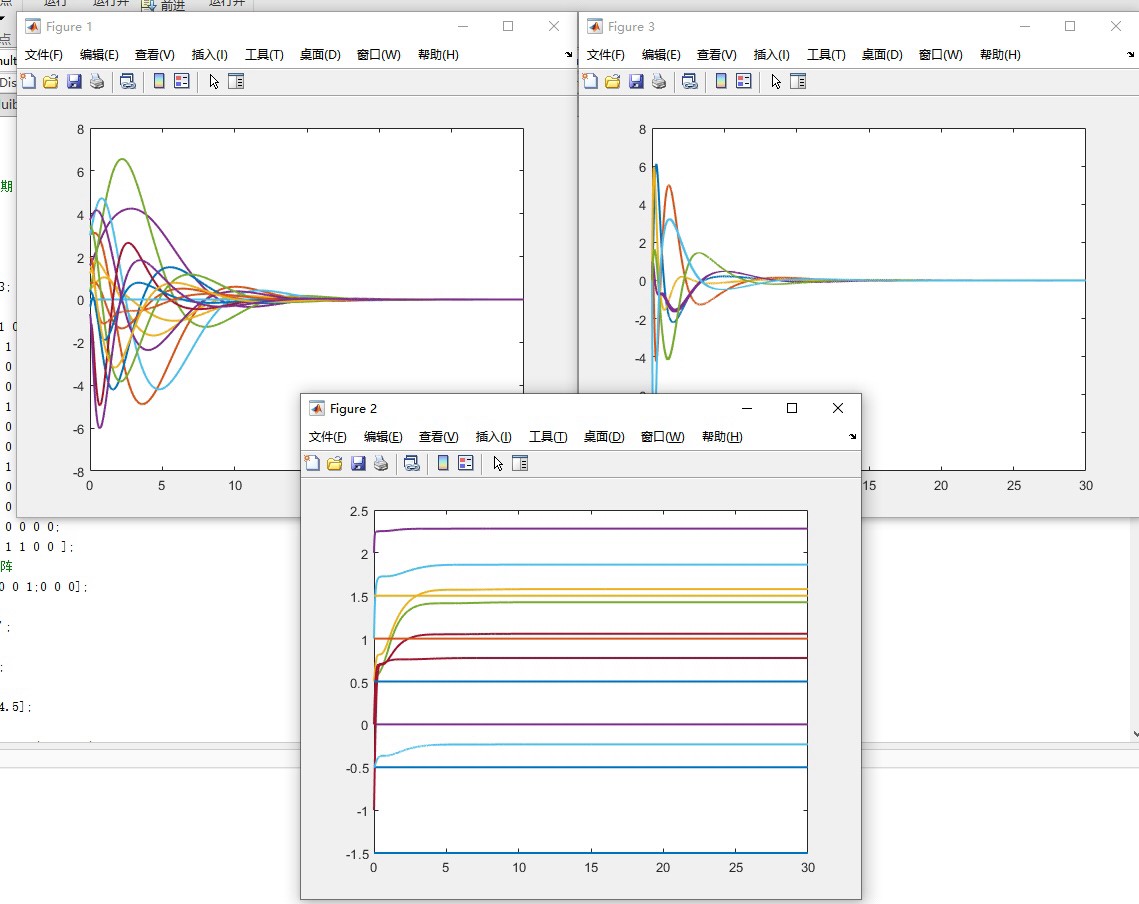
5. 仿真速通技巧
- 工具选择:MATLAB/Simulink适合快速验证理论,Python+ROS更适合硬件在环;
- 可视化关键:绘制误差范数随时间的变化曲线,一眼看出是否有限时间收敛;
- 参数调试:先固定触发阈值,调控制增益;再固定增益,优化触发条件。
参考代码包:
- [1]中有限时间协议:GitHub搜 "Finite-time-consensus-MATLAB"
- [汽车编队仿真]:Gazebo+ROS的
car_demo开源项目
控制理论最终要落地到代码和硬件,建议边仿真边对比论文中的收敛曲线,往往会有新发现。
(注:以上代码为简化示例,实际需结合具体模型参数)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 17
17 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)