【STM32】智能家居项目
main.cled.cled.hbeep.cbeep.hkeyboard.ckeyboard.hlock.clock.holed.coled.hw25q128.cw25q128.hpassword.cpassword.htimer.ctimer.htasks.ctasks.hadc.cadc.hfan.cfan.hbluetooth.cbluetooth.hvoice.cvoice.hdht11.
·
一、项目需求
- 支持模拟多线程功能;
- 支持门禁功能;
- 支持燃气报警功能;
- 支持环境数据上传 OneNET 功能;
- 支持蓝牙、语音控制客厅/卧室灯;
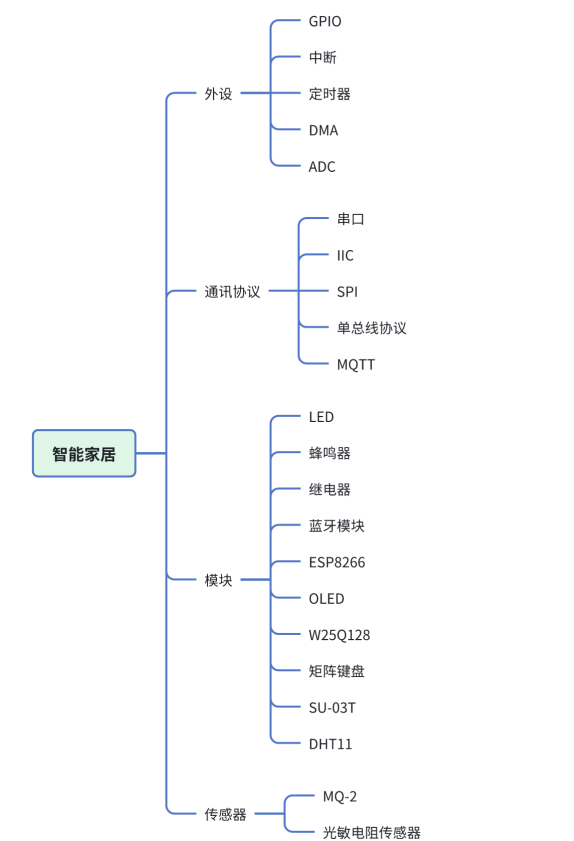
二、硬件清单
- 矩阵键盘
- OLED
- 蜂鸣器
- W25Q128
- 继电器
- 烟雾传感器
- DHT11
- 光敏电阻传感器
- SU-03T
- 蓝牙模块
- 杜邦线
- STM32
- ST-Link
- USB转TTL
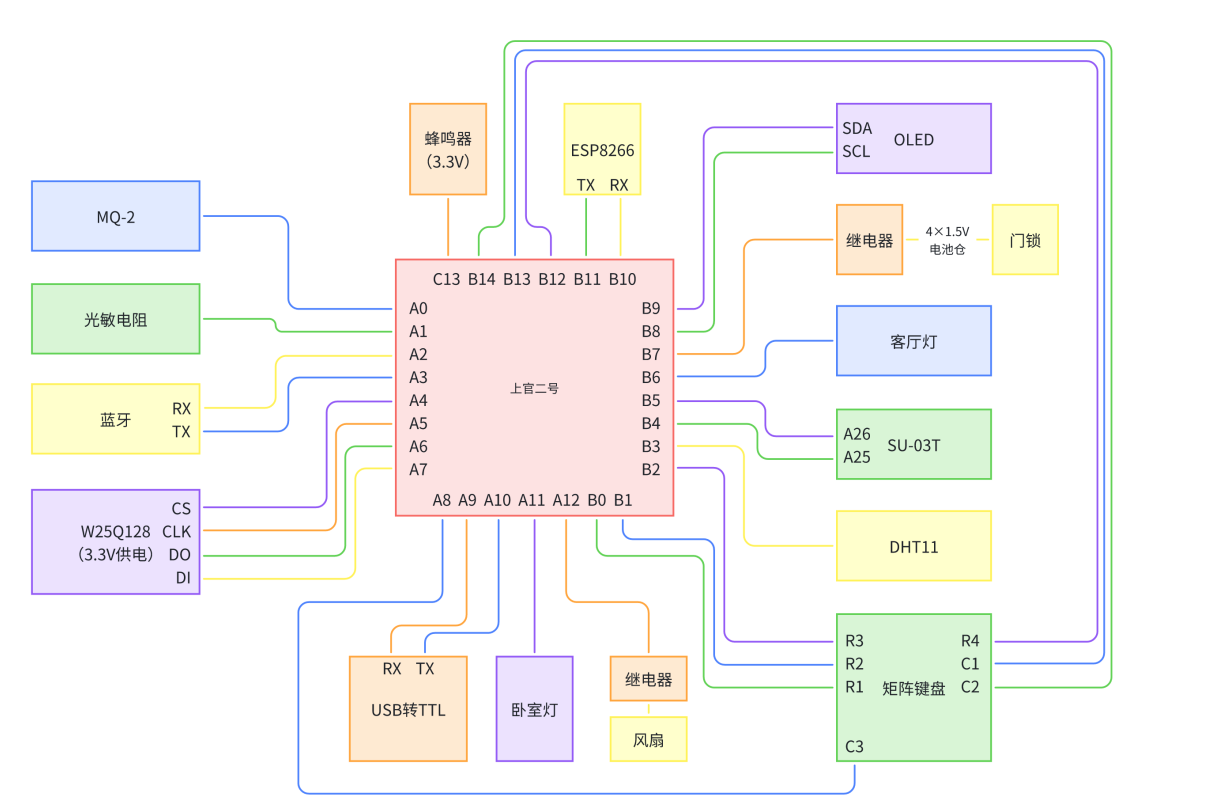
三、硬件接线
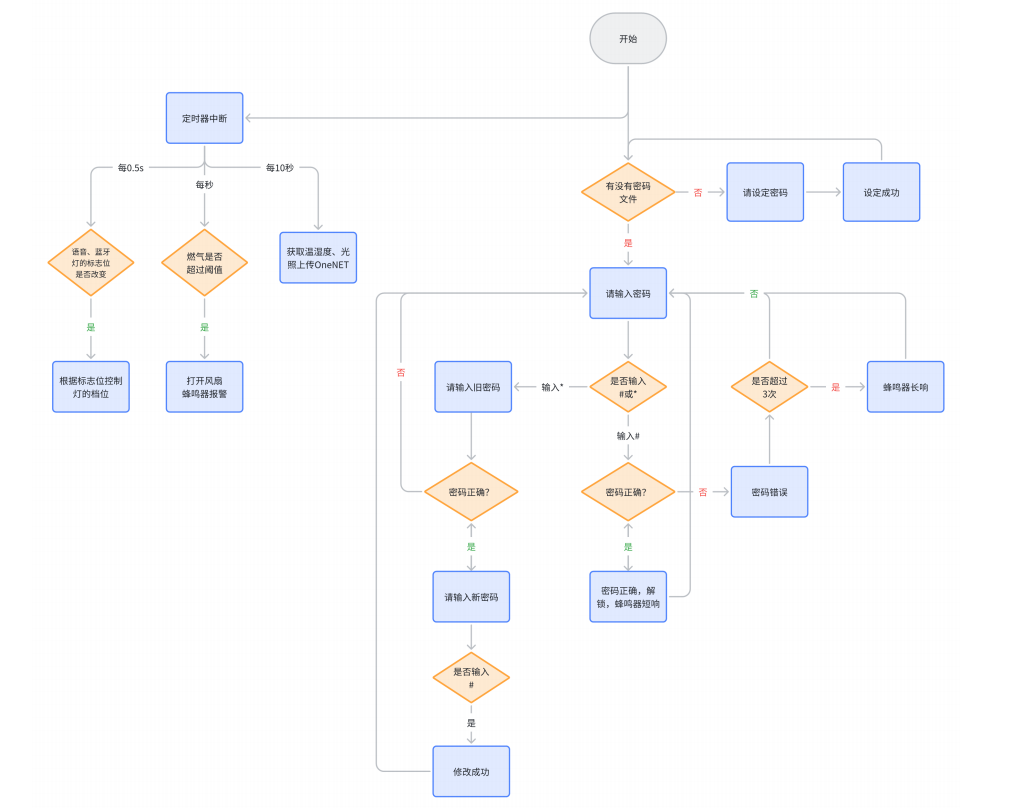
四、项目框图
五、完整代码
main.c
#include "sys.h"
#include "uart1.h"
#include "delay.h"
#include "led.h"
#include "uart1.h"
#include "beep.h"
#include "keyboard.h"
#include "lock.h"
#include "oled.h"
#include "w25q128.h"
#include "password.h"
#include "timer.h"
#include "tasks.h"
#include "adc.h"
#include "fan.h"
#include "bluetooth.h"
#include "voice.h"
#include "esp8266.h"
#include "onenet.h"
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
//串口1初始化
uart1_init(115200);
//蜂鸣器初始化
beep_init();
//矩阵键盘初始化
keyboard_init();
//电磁锁初始化
lock_init();
//OLED初始化
oled_init();
//密码模块初始化
password_init();
//定时器初始化
timer_init(5000 - 1, 7200 - 1); //500ms中断一次
//ADC初始化
adc_dma_init();
//风扇初始化
fan_init();
//蓝牙初始化
bt_init(115200);
//LED初始化
led_init();
//语音模块初始化
voice_init();
//esp8266初始化
esp8266_init(115200);
//MQTT初始化
printf("MQTT初始化...\r\n");
mqtt_init();
printf("MQTT连接...\r\n");
mqtt_connect(MQTT_ClientID, MQTT_UserName, MQTT_PassWord);
//串口打印测试
printf("打印测试:hello world\r\n");
//检查密码是否存在
password_check();
//按键最后一次输入值
uint8_t key_last = 0;
while(1)
{
//OLED显示输入
oled_show_input();
//获取最后一次输入值
key_last = password_get_input();
//如果最后一次输入值为#
if(key_last == POUND_KEY){
//密码比对
if(password_compare() == TRUE){
password_input_right_action();
}else{
password_input_wrong_action();
}
//如果最后一次输入值为*
}else if(key_last == START_KEY){
//显示输入旧密码
oled_show_old();
//获取输入
password_get_input();
//密码比对
if(password_compare() == TRUE){
password_old_right_action();
}else{
password_old_wrong_action();
}
}
}
}
led.c
#include "led.h"
#include "sys.h"
TIM_HandleTypeDef pwm_handler = {0};;
//init函数
void led_livingroom_init(uint16_t arr, uint16_t psc)
{
TIM_OC_InitTypeDef pwm_config = {0};
//时基工作参数初始化
pwm_handler.Instance = TIM4;
pwm_handler.Init.Prescaler = psc;
pwm_handler.Init.Period = arr;
pwm_handler.Init.CounterMode = TIM_COUNTERMODE_UP;
pwm_handler.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_PWM_Init(&pwm_handler); //自动调用msp函数
//PWM模式配置
pwm_config.OCMode = TIM_OCMODE_PWM1;
pwm_config.Pulse = 0;
pwm_config.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&pwm_handler,&pwm_config,TIM_CHANNEL_1);
//使能输出,启动计数器
HAL_TIM_PWM_Start(&pwm_handler,TIM_CHANNEL_1);
}
//msp函数
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM4){
//GPIO初始化
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOB时钟
__HAL_RCC_GPIOB_CLK_ENABLE();
//使能定时器4时钟
__HAL_RCC_TIM4_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_6; //PWM对应引脚
gpio_initstruct.Mode = GPIO_MODE_AF_PP; //复用推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOB, &gpio_initstruct);
}
}
//修改CCR值的函数
void pwm_compare_set(uint16_t val)
{
__HAL_TIM_SET_COMPARE(&pwm_handler,TIM_CHANNEL_1,val);
}
//客厅灯关闭
void led_livingroom_off(void)
{
pwm_compare_set(0);
}
//客厅灯低亮
void led_livingroom_low(void)
{
pwm_compare_set(150);
}
//客厅灯中亮
void led_livingroom_medium(void)
{
pwm_compare_set(300);
}
//客厅灯高亮
void led_livingroom_high(void)
{
pwm_compare_set(450);
}
//卧室灯初始化函数
void led_bedroom_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_11; //卧室灯对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
//关闭卧室灯
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_SET);
}
//点亮卧室灯的函数
void led_bedroom_on(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_RESET); //拉低卧室灯引脚,点亮卧室灯
}
//熄灭卧室灯的函数
void led_bedroom_off(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_SET); //拉高卧室灯引脚,熄灭卧室灯
}
//翻转卧室灯的函数
void led_bedroom_toggle(void)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_11); //翻转卧室灯引脚电平
}
//灯初始化
void led_init(void)
{
//卧室灯初始化
led_bedroom_init();
//客厅灯初始化
led_livingroom_init(500 - 1, 72 - 1);
}
led.h
#ifndef __LED_H__
#define __LED_H__
#include "sys.h"
//卧室灯初始化函数
void led_bedroom_init(void);
//点亮卧室灯的函数
void led_bedroom_on(void);
//熄灭卧室灯的函数
void led_bedroom_off(void);
//翻转卧室灯的函数
void led_bedroom_toggle(void);
//灯初始化
void led_init(void);
//init函数
void pwm_init(uint16_t arr, uint16_t psc);
//修改CCR值的函数
void pwm_compare_set(uint16_t val);
//客厅灯关闭
void led_livingroom_off(void);
//客厅灯低亮
void led_livingroom_low(void);
//客厅灯中亮
void led_livingroom_medium(void);
//客厅灯高亮
void led_livingroom_high(void);
#endif
beep.c
#include "beep.h"
#include "sys.h"
//初始化GBIO口函数
void beep_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOC时钟
__HAL_RCC_GPIOC_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_13; //beep对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //上拉
gpio_initstruct.Pull = GPIO_PULLUP; //高速
HAL_GPIO_Init(GPIOC, &gpio_initstruct);
//关闭beep
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET);
}
//开启beep的函数
void beep_on(void)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_RESET); //拉低beep引脚,开启beep
}
//关闭beep的函数
void beep_off(void)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13, GPIO_PIN_SET); //拉高beep引脚,关闭beep
}
//翻转beep的函数
void beep_toggle(void)
{
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13); //翻转beep引脚电平
}
beep.h
#ifndef __BEEP_H__
#define __BEEP_H__
//初始化GBIO口函数
void beep_init(void);
//开启beep的函数
void beep_on(void);
//关闭beep的函数
void beep_off(void);
//翻转beep的函数
void beep_toggle(void);
#endif
keyboard.c
#include "keyboard.h"
#include "delay.h"
static uint8_t key_value = 0;
//矩阵键盘初始化
void keyboard_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOA GPIOB时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_12; //行对应引脚
gpio_initstruct.Mode = GPIO_MODE_IT_FALLING; //中断下降沿触发
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOB, &gpio_initstruct);
gpio_initstruct.Pin = GPIO_PIN_13 | GPIO_PIN_14; //列对应引脚
gpio_initstruct.Mode = GPIO_MODE_INPUT; //输入模式
gpio_initstruct.Pull = GPIO_PULLDOWN; //下拉
HAL_GPIO_Init(GPIOB, &gpio_initstruct);
gpio_initstruct.Pin = GPIO_PIN_8; //列对应引脚
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
//配置中断
HAL_NVIC_SetPriority(EXTI0_IRQn, 3, 0);//配置中断线
HAL_NVIC_EnableIRQ(EXTI0_IRQn); //使能中断
HAL_NVIC_SetPriority(EXTI1_IRQn, 3, 0);//配置中断线
HAL_NVIC_EnableIRQ(EXTI1_IRQn); //使能中断
HAL_NVIC_SetPriority(EXTI2_IRQn, 3, 0);//配置中断线
HAL_NVIC_EnableIRQ(EXTI2_IRQn); //使能中断
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 3, 0);//配置中断线
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); //使能中断
}
//中断线0的中断服务函数
void EXTI0_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
}
//中断线1的中断服务函数
void EXTI1_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
}
//中断线2的中断服务函数
void EXTI2_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);
}
//中断线12的中断服务函数
void EXTI15_10_IRQHandler(void)
{
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_12);
}
//中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
uint8_t row = 0, column = 0;
//如果扫描过程中再次按下则直接返回
if(key_value != 0){
return;
}
//确认行
if(GPIO_Pin == GPIO_PIN_0){
row = 0x10;
}else if(GPIO_Pin == GPIO_PIN_1){
row = 0x20;
}else if(GPIO_Pin == GPIO_PIN_2){
row = 0x30;
}else if(GPIO_Pin == GPIO_PIN_12){
row = 0x40;
}
//确认列
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_13) == GPIO_PIN_SET){
delay_ms(10);
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_13)){
column = 0x01;
}
}else if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_SET){
delay_ms(10);
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14)){
column = 0x02;
}
}else if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8) == GPIO_PIN_SET){
delay_ms(10);
while(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8)){
column = 0x03;
}
}
if(row != 0 && column != 0){
key_value = row | column;
}
}
//获取矩阵键盘值
uint8_t keyboard_get_value(void)
{
uint8_t ch = 0;
if(key_value != 0){
if(key_value == 0x11) ch = '1';
else if(key_value == 0x12) ch = '2';
else if(key_value == 0x13) ch = '3';
else if(key_value == 0x21) ch = '4';
else if(key_value == 0x22) ch = '5';
else if(key_value == 0x23) ch = '6';
else if(key_value == 0x31) ch = '7';
else if(key_value == 0x32) ch = '8';
else if(key_value == 0x33) ch = '9';
else if(key_value == 0x41) ch = '*';
else if(key_value == 0x42) ch = '0';
else if(key_value == 0x43) ch = '#';
delay_ms(400);
key_value = 0x00;
}
return ch;
}
keyboard.h
#ifndef __KEYBOARD_H__
#define __KEYBOARD_H__
#include "sys.h"
//矩阵键盘初始化
void keyboard_init(void);
//获取矩阵键盘值
uint8_t keyboard_get_value(void);
#endif
lock.c
#include "lock.h"
#include "sys.h"
//初始化GBIO口函数
void lock_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOB时钟
__HAL_RCC_GPIOB_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_7; //LOCK对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //上拉
gpio_initstruct.Pull = GPIO_PULLUP; //高速
HAL_GPIO_Init(GPIOB, &gpio_initstruct);
//关闭LOCK
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);
}
//打开LOCK的函数
void lock_on(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET); //拉低LOCK引脚,打开LOCK
}
//关闭LOCK的函数
void lock_off(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET); //拉高LOCK引脚,关闭LOCK
}
//翻转LOCK的函数
void lock_toggle(void)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_7); //翻转LED1引脚电平
}
//返回LOCK的状态
uint8_t lock_status_get(void)
{
return (uint8_t)HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7);
}
lock.h
#ifndef __LOCK_H__
#define __LOCK_H__
#include "stdint.h"
#define LCOK_STATUS_ON 0
#define LOCK_STATUS_OFF 0
//初始化GBIO口函数
void lock_init(void);
//点亮lock的函数
void lock_on(void);
//熄灭lock的函数
void lock_off(void);
//翻转lock的函数
void lock_toggle(void);
//返回继电器的状态
uint8_t lock_status_get(void);
#endif
oled.c
#include "oled.h"
#include "delay.h"
#include "font.h"
//OLED相关GPIO初始化
void oled_gpio_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能SCL和SDA引脚时钟
OLED_I2C_SCL_CLK();
OLED_I2C_SDA_CLK();
//GPIO初始化配置
gpio_initstruct.Pin = OLED_I2C_SCL_PIN; //SCL对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(OLED_I2C_SCL_PORT, &gpio_initstruct);
gpio_initstruct.Pin = OLED_I2C_SDA_PIN; //SDA对应引脚
HAL_GPIO_Init(OLED_I2C_SDA_PORT, &gpio_initstruct);
}
//I2C起始信号
void oled_i2c_start(void)
{
OLED_SCL_SET();
OLED_SDA_SET();
OLED_SDA_RESET();
OLED_SCL_RESET();
}
//I2C停止信号
void oled_i2c_stop(void)
{
OLED_SCL_SET();
OLED_SDA_RESET();
OLED_SDA_SET();
}
//I2C应答信号
void oled_i2c_ack(void)
{
OLED_SCL_SET();
OLED_SCL_RESET();
}
//I2C写字节
void oled_i2c_write_byte(uint8_t data)
{
uint8_t i, tmp;
tmp = data;
//往SDA总线上循环写数据位,高位先行
for(i = 0; i <8 ;i++){
//取出最高位
if((tmp & 0x80) == 0x80){
OLED_SDA_SET();
}else{
OLED_SDA_RESET();
}
//逻辑左移一位,去除次高位
tmp = tmp << 1;
OLED_SCL_SET();
OLED_SCL_RESET();
}
}
//OLED写命令
void oled_write_cmd(uint8_t cmd)
{
oled_i2c_start();
oled_i2c_write_byte(0x78);
oled_i2c_ack();
oled_i2c_write_byte(0x00);
oled_i2c_ack();
oled_i2c_write_byte(cmd);
oled_i2c_ack();
oled_i2c_stop();
}
//OLED写数据
void oled_write_data(uint8_t data)
{
oled_i2c_start();
oled_i2c_write_byte(0x78);
oled_i2c_ack();
oled_i2c_write_byte(0x40);
oled_i2c_ack();
oled_i2c_write_byte(data);
oled_i2c_ack();
oled_i2c_stop();
}
//OLED初始化
void oled_init(void)
{
oled_gpio_init();
delay_ms(100);
oled_write_cmd(0xAE); //设置显示开启/关闭,0xAE关闭,0xAF开启
oled_write_cmd(0xD5); //设置显示时钟分频比/振荡器频率
oled_write_cmd(0x80); //0x00~0xFF
oled_write_cmd(0xA8); //设置多路复用率
oled_write_cmd(0x3F); //0x0E~0x3F
oled_write_cmd(0xD3); //设置显示偏移
oled_write_cmd(0x00); //0x00~0x7F
oled_write_cmd(0x40); //设置显示开始行,0x40~0x7F
oled_write_cmd(0xA1); //设置左右方向,0xA1正常,0xA0左右反置
oled_write_cmd(0xC8); //设置上下方向,0xC8正常,0xC0上下反置
oled_write_cmd(0xDA); //设置COM引脚硬件配置
oled_write_cmd(0x12);
oled_write_cmd(0x81); //设置对比度
oled_write_cmd(0xCF); //0x00~0xFF
oled_write_cmd(0xD9); //设置预充电周期
oled_write_cmd(0xF1);
oled_write_cmd(0xDB); //设置VCOMH取消选择级别
oled_write_cmd(0x30);
oled_write_cmd(0xA4); //设置整个显示打开/关闭
oled_write_cmd(0xA6); //设置正常/反色显示,0xA6正常,0xA7反色
oled_write_cmd(0x8D); //设置充电泵
oled_write_cmd(0x14);
oled_write_cmd(0xAF); //开启显示
oled_fill(0x00); //清空屏幕
}
//设置坐标
void oled_set_cursor(uint8_t x, uint8_t y)
{
//指定待写入页
oled_write_cmd(0xB0 + y);
//指定待写入列
oled_write_cmd((x & 0x0F) | 0x00);
oled_write_cmd((x & 0xF0) >> 4 | 0x10);
}
//循环填充
void oled_fill(uint8_t data)
{
uint8_t i,j;
for(i = 0;i < 8;i++){
oled_set_cursor(0, i); //指定一次页,写一次列自动往后偏移
for(j = 0;j < 128;j++){
oled_write_data(data);
}
}
}
//OLED显示一个字符
void oled_show_char(uint8_t x, uint8_t y, uint8_t num, uint8_t size)
{
uint8_t i,j, page;
//ASCII码相对第一个空格字符偏移
num = num - ' ';
//确定字符所占页数
page = size / 8;
if(size % 8){
page++;
}
//循环刷新屏幕
for(j = 0;j < page;j++){
//设定字符坐标
oled_set_cursor(x, y + j);
//分行写数据
for(i = size/2 * j;i < size/2 * (j+1);i++){
if(size == 12){
oled_write_data(ascii_6X12[num][i]);
}else if(size == 16){
oled_write_data(ascii_8X16[num][i]);
}else if(size == 24){
oled_write_data(ascii_12X24[num][i]);
}
}
}
}
//OLED显示字符串
void oled_show_string(uint8_t x, uint8_t y, char *p, uint8_t size)
{
while(*p != '\0'){
oled_show_char(x, y, *p, size);
x += size/2;
p++;
}
}
//OLED显示汉字
//void oled_show_chinese(uint8_t x, uint8_t y, uint8_t N, uint8_t size)
//{
// uint8_t i,j, page;
//
// //确定汉字所占页数
// page = size / 8;
// if(size % 8){
// page++;
// }
// //循环刷新屏幕
// for(j = 0;j < page;j++){
// //设定字符坐标
// oled_set_cursor(x, y + j);
// //分行写数据
// for(i = size * j;i < size * (j+1);i++){
// if(size == 16){
// oled_write_data(chinese_16x16[N][i]);
// }else if(size == 24){
// oled_write_data(chinese_24x24[N][i]);
// }
// }
// }
//}
//OLED显示汉字
void oled_show_chinese(uint8_t x, uint8_t y, uint8_t N, uint8_t message_type)
{
uint16_t i,j;
for(j = 0;j < 2;j++){
oled_set_cursor(x, y + j);
for(i = 16 * j;i < 16 * (j + 1);i++){
switch(message_type){
case SHOW_INPUT_PWD:
oled_write_data(chinese_enter_password[N][i]);
break;
case SHOW_PWD_RIGHT:
oled_write_data(chinese_password_right[N][i]);
break;
case SHOW_PWD_WRONG:
oled_write_data(chinese_password_wrong[N][i]);
break;
case SHOW_INPUT_OLD_PWD:
oled_write_data(chinese_enter_old_password[N][i]);
break;
case SHOW_INPUT_NEW_PWD:
oled_write_data(chinese_enter_new_password[N][i]);
break;
case SHOW_PWD_CHANGED:
oled_write_data(chinese_password_changed[N][i]);
break;
case SHOW_SET_PWD:
oled_write_data(chinese_set_password[N][i]);
break;
}
}
}
}
//请输入密码
void oled_show_input(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_INPUT_PWD);
oled_show_chinese(30, 1, 1, SHOW_INPUT_PWD);
oled_show_chinese(50, 1, 2, SHOW_INPUT_PWD);
oled_show_chinese(70, 1, 3, SHOW_INPUT_PWD);
oled_show_chinese(90, 1, 4, SHOW_INPUT_PWD);
oled_show_char(110, 1, ':', 16);
}
//密码正确
void oled_show_right(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_PWD_RIGHT);
oled_show_chinese(30, 1, 1, SHOW_PWD_RIGHT);
oled_show_chinese(50, 1, 2, SHOW_PWD_RIGHT);
oled_show_chinese(70, 1, 3, SHOW_PWD_RIGHT);
}
//密码错误
void oled_show_wrong(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_PWD_WRONG);
oled_show_chinese(30, 1, 1, SHOW_PWD_WRONG);
oled_show_chinese(50, 1, 2, SHOW_PWD_WRONG);
oled_show_chinese(70, 1, 3, SHOW_PWD_WRONG);
}
//请输入旧密码
void oled_show_old(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_INPUT_OLD_PWD);
oled_show_chinese(30, 1, 1, SHOW_INPUT_OLD_PWD);
oled_show_chinese(50, 1, 2, SHOW_INPUT_OLD_PWD);
oled_show_chinese(70, 1, 3, SHOW_INPUT_OLD_PWD);
oled_show_chinese(90, 1, 4, SHOW_INPUT_OLD_PWD);
oled_show_chinese(110, 1, 5, SHOW_INPUT_OLD_PWD);
}
//请输入新密码
void oled_show_new(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_INPUT_NEW_PWD);
oled_show_chinese(30, 1, 1, SHOW_INPUT_NEW_PWD);
oled_show_chinese(50, 1, 2, SHOW_INPUT_NEW_PWD);
oled_show_chinese(70, 1, 3, SHOW_INPUT_NEW_PWD);
oled_show_chinese(90, 1, 4, SHOW_INPUT_NEW_PWD);
oled_show_chinese(110, 1, 5, SHOW_INPUT_NEW_PWD);
}
//密码修改成功
void oled_show_changed(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_PWD_CHANGED);
oled_show_chinese(30, 1, 1, SHOW_PWD_CHANGED);
oled_show_chinese(50, 1, 2, SHOW_PWD_CHANGED);
oled_show_chinese(70, 1, 3, SHOW_PWD_CHANGED);
oled_show_chinese(90, 1, 4, SHOW_PWD_CHANGED);
oled_show_chinese(110, 1, 5, SHOW_PWD_CHANGED);
}
//请设定密码
void oled_show_set(void)
{
oled_fill(0x00); //清空屏幕
oled_show_chinese(10, 1, 0, SHOW_SET_PWD);
oled_show_chinese(30, 1, 1, SHOW_SET_PWD);
oled_show_chinese(50, 1, 2, SHOW_SET_PWD);
oled_show_chinese(70, 1, 3, SHOW_SET_PWD);
oled_show_chinese(90, 1, 4, SHOW_SET_PWD);
oled_show_char(110, 1, ':', 16);
}
//OLED显示图片
void oled_show_image(uint8_t x, uint8_t y, uint8_t width, uint8_t height, uint8_t *bmp)
{
uint8_t i, j;
for(j = 0; j < height; j++)
{
oled_set_cursor(x, y + j);
for(i = 0; i < width; i++)
oled_write_data(bmp[width * j + i]);
}
}
oled.h
#ifndef __OLED_H__
#define __OLED_H__
#include "sys.h"
//定义密码处理显示字符枚举类型
enum message{
SHOW_INPUT_PWD = 0,
SHOW_PWD_RIGHT,
SHOW_PWD_WRONG,
SHOW_INPUT_OLD_PWD,
SHOW_INPUT_NEW_PWD,
SHOW_PWD_CHANGED,
SHOW_SET_PWD
};
#define OLED_I2C_SCL_CLK() __HAL_RCC_GPIOB_CLK_ENABLE()
#define OLED_I2C_SCL_PORT GPIOB
#define OLED_I2C_SCL_PIN GPIO_PIN_8
#define OLED_I2C_SDA_CLK() __HAL_RCC_GPIOB_CLK_ENABLE()
#define OLED_I2C_SDA_PORT GPIOB
#define OLED_I2C_SDA_PIN GPIO_PIN_9
#define OLED_SCL_RESET() HAL_GPIO_WritePin(OLED_I2C_SCL_PORT,OLED_I2C_SCL_PIN,GPIO_PIN_RESET)
#define OLED_SCL_SET() HAL_GPIO_WritePin(OLED_I2C_SCL_PORT,OLED_I2C_SCL_PIN,GPIO_PIN_SET)
#define OLED_SDA_RESET() HAL_GPIO_WritePin(OLED_I2C_SDA_PORT,OLED_I2C_SDA_PIN,GPIO_PIN_RESET)
#define OLED_SDA_SET() HAL_GPIO_WritePin(OLED_I2C_SDA_PORT,OLED_I2C_SDA_PIN,GPIO_PIN_SET)
//OLED初始化
void oled_init(void);
//I2C写命令
void oled_write_cmd(uint8_t cmd);
//I2C写数据
void oled_write_data(uint8_t data);
//循环填充
void oled_fill(uint8_t data);
//设置坐标
void oled_set_cursor(uint8_t x, uint8_t y);
//OLED显示一个字符
void oled_show_char(uint8_t x, uint8_t y, uint8_t num, uint8_t size);
//OLED显示字符串
void oled_show_string(uint8_t x, uint8_t y, char *p, uint8_t size);
//OLED显示汉字
void oled_show_chinese(uint8_t x, uint8_t y, uint8_t N, uint8_t size);
//OLED显示图片
void oled_show_image(uint8_t x, uint8_t y, uint8_t width, uint8_t height, uint8_t *bmp);
//请输入密码
void oled_show_input(void);
//密码正确
void oled_show_right(void);
//密码错误
void oled_show_wrong(void);
//请输入旧密码
void oled_show_old(void);
//请输入新密码
void oled_show_new(void);
//密码修改成功
void oled_show_changed(void);
//请设定密码
void oled_show_set(void);
#endif
w25q128.c
#include "w25q128.h"
SPI_HandleTypeDef spi_handle = {0};
//SPI初始化
void w25q128_spi_init(void)
{
spi_handle.Instance = SPI1; //使用SPI1
spi_handle.Init.Mode = SPI_MODE_MASTER; //作为主设备
spi_handle.Init.Direction = SPI_DIRECTION_2LINES; //全双工传输
spi_handle.Init.DataSize = SPI_DATASIZE_8BIT; //数据位长度位8bit
spi_handle.Init.CLKPolarity = SPI_POLARITY_LOW; //时钟极性为低电平
spi_handle.Init.CLKPhase = SPI_PHASE_1EDGE; //奇数边沿采样
spi_handle.Init.NSS = SPI_NSS_SOFT; //软件控制
spi_handle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //波特率256分频
spi_handle.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位先行
spi_handle.Init.TIMode = SPI_TIMODE_DISABLE;
spi_handle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
spi_handle.Init.CRCPolynomial = 7;
HAL_SPI_Init(&spi_handle);
}
//SPI硬件相关初始化
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
if(hspi->Instance == SPI1){
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
//使能SPI1时钟
__HAL_RCC_SPI1_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_4; //NSS对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
gpio_initstruct.Pin = GPIO_PIN_5 | GPIO_PIN_7; //CLK、MOSI对应引脚
gpio_initstruct.Mode = GPIO_MODE_AF_PP; //复用推挽输出
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
gpio_initstruct.Pin = GPIO_PIN_6; //MISO对应引脚
gpio_initstruct.Mode = GPIO_MODE_INPUT; //输入模式
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
}
}
//SPI字节数据交换(数据收发)
uint8_t w25q128_spi_swap_byte(uint8_t data)
{
uint8_t recv_data = 0;
HAL_SPI_TransmitReceive(&spi_handle, &data, &recv_data, 1, 1000); //数据收发
return recv_data;
}
//W25Q128初始化
void w25q128_init(void)
{
w25q128_spi_init();
}
//读取设备ID
uint16_t w25q128_read_id(void)
{
uint16_t device_id = 0;
//拉低片选
W25Q128_CS(0);
//写指令
w25q128_spi_swap_byte(FLASH_ManufactDeviceID);
w25q128_spi_swap_byte(0x00);
w25q128_spi_swap_byte(0x00);
w25q128_spi_swap_byte(0x00);
//获取device_id
device_id = w25q128_spi_swap_byte(FLASH_DummyByte) << 8;
device_id |= w25q128_spi_swap_byte(FLASH_DummyByte);
//拉高片选
W25Q128_CS(1);
return device_id;
}
//W25Q128写使能
void w25q128_write_enable(void)
{
//拉低片选
W25Q128_CS(0);
//写入指令
w25q128_spi_swap_byte(FLASH_WriteEnable);
//拉高片选
W25Q128_CS(1);
}
//W25Q128读取SR1寄存器
uint8_t w25q128_read_sr1(void)
{
uint8_t recv_data = 0;
//拉低片选
W25Q128_CS(0);
//发送指令
w25q128_spi_swap_byte(FLASH_ReadStatusReg1);
//读取SR1
recv_data = w25q128_spi_swap_byte(FLASH_DummyByte);
//拉高片选
W25Q128_CS(1);
return recv_data;
}
//发送地址
void w25q128_send_address(uint32_t address)
{
//从高位到低位依次发送
w25q128_spi_swap_byte(address >> 16);
w25q128_spi_swap_byte(address >> 8);
w25q128_spi_swap_byte(address);
}
//W25Q128读数据
void w25q128_read_data(uint32_t address, uint8_t *data, uint32_t size)
{
uint32_t i = 0;
//拉低片选
W25Q128_CS(0);
//发送指令
w25q128_spi_swap_byte(FLASH_ReadData);
//发送地址
w25q128_send_address(address);
//读取SR1
for(i = 0;i < size;i++){
data[i] = w25q128_spi_swap_byte(FLASH_DummyByte);
}
//拉高片选
W25Q128_CS(1);
}
//忙等待
void w25q128_wait_busy(void)
{
while((w25q128_read_sr1() & 0x01) == 0x01);
}
//W25Q128页写
void w25q128_write_page(uint32_t address, uint8_t *data, uint16_t size)
{
uint16_t i = 0;
//写使能
w25q128_write_enable();
//拉低片选
W25Q128_CS(0);
//发送指令
w25q128_spi_swap_byte(FLASH_PageProgram);
//发送地址
w25q128_send_address(address);
//写入数据
for(i = 0;i < size;i++){
w25q128_spi_swap_byte(data[i]);
}
//拉高片选
W25Q128_CS(1);
//忙等待
w25q128_wait_busy();
}
//W25Q128擦除扇区
void w25q128_erase_sector(uint32_t address)
{
//写使能
w25q128_write_enable();
//忙等待
w25q128_wait_busy();
//拉低片选
W25Q128_CS(0);
//发送指令
w25q128_spi_swap_byte(FLASH_SectorErase);
//发送地址
w25q128_send_address(address);
//拉高片选
W25Q128_CS(1);
//忙等待
w25q128_wait_busy();
}
w25q128.h
#ifndef __W25Q128_H__
#define __W25Q128_H__
#include "sys.h"
#define W25Q128_CS(x) do{ x ? \
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4, GPIO_PIN_RESET); \
}while(0)
//指令表
#define FLASH_ManufactDeviceID 0x90
#define FLASH_WriteEnable 0x06
#define FLASH_ReadStatusReg1 0x05
#define FLASH_ReadData 0x03
#define FLASH_PageProgram 0x02
#define FLASH_SectorErase 0x20
#define FLASH_DummyByte 0xFF
//W25Q128初始化
void w25q128_init(void);
//读取设备ID
uint16_t w25q128_read_id(void);
//W25Q128读数据
void w25q128_read_data(uint32_t address, uint8_t *data, uint32_t size);
//忙等待
void w25q128_wait_busy(void);
//W25Q128页写
void w25q128_write_page(uint32_t address, uint8_t *data, uint16_t size);
//W25Q128擦除扇区
void w25q128_erase_sector(uint32_t address);
#endif
password.c
#include "password.h"
#include "w25q128.h"
#include "oled.h"
#include "keyboard.h"
#include "string.h"
#include "stdio.h"
#include "lock.h"
#include "beep.h"
#include "delay.h"
//密码长度宏定义
#define PASSWORD_SIZE 10
//输入字符串
uint8_t pwd_input[PASSWORD_SIZE] = {0};
//读出字符串
uint8_t pwd_read[PASSWORD_SIZE] = {0};
//矩阵键盘输入缓存
uint8_t key_value = 0;
//定义数组索引
uint8_t i = 0;
//密码输入错误次数
uint8_t try_times = 0;
//初始化密码
void password_init(void)
{
//W25Q128初始化
w25q128_init();
}
//清空输入缓存
void password_input_clear(void)
{
memset(pwd_input, 0, PASSWORD_SIZE);
i = 0;
}
//保存密码
void password_save(void)
{
//擦除待写入扇区
w25q128_erase_sector(0x000000);
//写入输入的密码
w25q128_write_page(0x000000, pwd_input, PASSWORD_SIZE);
//OLED屏幕显示密码已修改
oled_show_changed();
}
//获取键盘输入
uint8_t password_get_input(void)
{
//清空输入缓存
password_input_clear();
while(1){
//获取输入字符
key_value = keyboard_get_value();
//判断输入字符逻辑
if(key_value == POUND_KEY){
printf("按下了#键,input: %s\r\n", pwd_input);
return POUND_KEY;
}else if(key_value == START_KEY){
printf("按下了*键\r\n");
return START_KEY;
}else if(key_value != 0){
printf("按下了 %c\r\n", key_value);
//OLED逐个字符显示
oled_show_char(20 + i * 10, 4, key_value, 16);
//存入输入缓存区
pwd_input[i++] = key_value;
}
}
}
//密码比对
uint8_t password_compare(void)
{
uint8_t i = 0;
//读出W25Q128中的密码
w25q128_read_data(0x000000, pwd_read, PASSWORD_SIZE);
//比对密码
//判断长度
if(strlen((char *)pwd_input) != strlen((char *)pwd_read)){
return FALSE;
}
//逐位比较
for(i = 0;i < strlen((char *)pwd_read); i++){
if(pwd_input[i] != pwd_read[i]){
return FALSE;
}
}
return TRUE;
}
//密码输入正确的操作
void password_input_right_action(void)
{
oled_show_right();
lock_on();
beep_on();
delay_ms(500);
beep_off();
delay_ms(1000);
lock_off();
//错误次数清零
try_times = 0;
}
//密码输入错误的操作
void password_input_wrong_action(void)
{
oled_show_wrong();
try_times++;
//错误超过三次
if(try_times >= 3){
beep_on();
delay_ms(1000);
beep_off();
try_times = 0;
}
delay_ms(1000);
}
//旧密码输入正确的操作
void password_old_right_action(void)
{
oled_show_new();
password_get_input();
password_save();
beep_on();
delay_ms(500);
beep_off();
delay_ms(500);
}
//旧密码输入错误的操作
void password_old_wrong_action(void)
{
oled_show_wrong();
delay_ms(1000);
}
//检查密码文件是否存在
void password_check(void)
{
w25q128_read_data(0x000000, pwd_read, PASSWORD_SIZE);
printf("读出密码:%s\r\n", pwd_read);
//判断密码是否存在
if(pwd_read[0] == '\0' || pwd_read[0] == 0xFF){
oled_show_set();
password_get_input();
password_save();
}
}
password.h
#ifndef __PASSWORD_H__
#define __PASSWORD_H__
#include "sys.h"
#define POUND_KEY '#'
#define START_KEY '*'
#define TRUE 1
#define FALSE 0
//初始化密码
void password_init(void);
//清空输入缓存
void password_input_clear(void);
//保存密码
void password_save(void);
//获取键盘输入
uint8_t password_get_input(void);
//密码比对
uint8_t password_compare(void);
//密码输入正确的操作
void password_input_right_action(void);
//密码输入错误的操作
void password_input_wrong_action(void);
//旧密码输入正确的操作
void password_old_right_action(void);
//旧密码输入错误的操作
void password_old_wrong_action(void);
//检查密码文件是否存在
void password_check(void);
#endif
timer.c
#include "timer.h"
#include "tasks.h"
TIM_HandleTypeDef timer_handle = {0};
//定时器初始化函数
void timer_init(uint16_t arr,uint16_t psc)
{
//配置定时器结构体
timer_handle.Instance = TIM2;
timer_handle.Init.Prescaler = psc;
timer_handle.Init.Period = arr;
timer_handle.Init.CounterMode = TIM_COUNTERMODE_UP;
timer_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&timer_handle);
//使能更新中断,启动计数器
HAL_TIM_Base_Start_IT(&timer_handle);
}
//msp初始化函数,在HAL_TIM_Base_Init中调用,无须自己调用
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2){
//开启时钟
__HAL_RCC_TIM2_CLK_ENABLE();
//设置中断优先级
HAL_NVIC_SetPriority(TIM2_IRQn,2,2);
//使能中断线
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
}
//中断服务函数
void TIM2_IRQHandler(void)
{
//公共处理函数
HAL_TIM_IRQHandler(&timer_handle);
}
//更新中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2){
systick_isr();
}
}
timer.h
#ifndef __TIMER_H__
#define __TIMER_H__
#include "sys.h"
void timer_init(uint16_t arr,uint16_t psc);
#endif
tasks.c
#include "tasks.h"
#include "led.h"
#include "stdio.h"
#include "adc.h"
#include "beep.h"
#include "fan.h"
#include "bluetooth.h"
#include "led.h"
#include "voice.h"
#include "dht11.h"
#include "string.h"
#include "onenet.h"
//定义各线程时间计数器
uint32_t task1_cnt = 0;
uint32_t task2_cnt = 0;
uint32_t task3_cnt = 0;
//定义线程标志
uint8_t task1_flag = 0;
uint8_t task2_flag = 0;
uint8_t task3_flag = 0;
//定义adc值
uint16_t adc_value[2] = {0};
//定义led状态
uint8_t led_status = 0;
//定义语音新状态标志
uint8_t voice_status_new = 0;
//定义语音旧状态标志
uint8_t voice_status_old = 0;
//500ms中断一次
void systick_isr(void)
{
if(task1_cnt < 1){
task1_cnt++;
}else{
task1_flag = 1;
task1_cnt = 0;
}
if(task2_cnt < 2){
task2_cnt++;
}else{
task2_flag = 1;
task2_cnt = 0;
}
if(task3_cnt < 120){
task3_cnt++;
}else{
task3_flag = 1;
task3_cnt = 0;
}
//三个任务“并行”执行
task_light_control();
task_gas_alarm();
task_env_upload();
}
//蓝牙语音控制灯线程
void task_light_control(void)
{
if(task1_flag == 0){
return;
}
task1_flag = 0;
//获取蓝牙控制LED值
led_status = bt_value_get();
//获取语音控制LED值
voice_status_new = voice_value_get();
//若产生新值才更新led_status
if(voice_status_new != voice_status_old){
led_status = voice_status_new;
voice_status_old = voice_status_new;
}
//根据LED状态标志改变灯的状态
switch(led_status){
case 0:
led_livingroom_off(); //客厅灯关闭
printf("客厅灯关闭\r\n");
break;
case 1:
led_livingroom_low(); //客厅灯低亮
printf("客厅灯低亮\r\n");
break;
case 2:
led_livingroom_medium(); //客厅灯中亮
printf("客厅灯中亮\r\n");
break;
case 3:
led_livingroom_high(); //客厅灯高亮
printf("客厅灯高亮\r\n");
break;
case 4:
led_bedroom_on(); //卧室灯打开
break;
case 5:
led_bedroom_off(); //卧室灯关闭
break;
default:
break;
}
}
//燃气报警检测线程
void task_gas_alarm(void)
{
if(task2_flag == 0){
return;
}
task2_flag = 0;
//获取燃气值
adc_result_get(adc_value);
float gas_value = (float)adc_value[0]/4096*3.3;
//printf("燃气值:%0.2f\r\n", gas_value);
if(gas_value > 1.0){
beep_on(); //报警
fan_on(); //开风扇
}else{
beep_off(); //不报警
fan_off(); //关风扇
}
}
//温湿度燃气数据上传onenet平台线程
void task_env_upload(void)
{
if(task3_flag == 0){
return;
}
task3_flag = 0;
//定义待上传JSON字符串
uint8_t data_send_buf[512];
//定义并获取温湿度数据
uint8_t dht11_data[4];
dht11_read(dht11_data);
//printf("湿度:%d.%dRH,",dht11_data[0],dht11_data[1]);
//printf("温度:%d.%d℃",dht11_data[2],dht11_data[3]);
//定义光照强度(由于没有光敏电阻模块,所以也采用烟雾数据)
float light_value = (float)adc_value[0]/4096*3.3;
//清空JSON字符串
memset(data_send_buf, 0, sizeof(data_send_buf));
//构造JSON字符串
memset(data_send_buf, 0, sizeof(data_send_buf));
sprintf((char *)data_send_buf, "{\"id\":\"1720777789227\",\"version\":\"1.0\",\"params\":{\"CurrentTemperature\":{\"value\":%d.%d},\"RelativeHumidity\":{\"value\":%d.%d},\"LightLuxValue\":{\"value\":%.1f}}}"
, dht11_data[2], dht11_data[3], dht11_data[0], dht11_data[1], light_value);
//上传至onenet平台
mqtt_publish_data(POST_TOPIC, (char *)data_send_buf, 0);
}
tasks.h
#ifndef __TASKS_H__
#define __TASKS_H__
#include "sys.h"
void systick_isr(void);
void task_light_control(void);
void task_gas_alarm(void);
void task_env_upload(void);
#endif
adc.c
#include "adc.h"
#include "string.h"
uint16_t adc_result[2] = {0};
//ADC句柄
ADC_HandleTypeDef adc_handle = {0};
//DMA句柄
DMA_HandleTypeDef dma_handle = {0};
//ADC配置
void adc_config(void)
{
adc_handle.Instance = ADC1; //选择ADC1
adc_handle.Init.DataAlign = ADC_DATAALIGN_RIGHT; //数据右对齐
adc_handle.Init.ScanConvMode = ADC_SCAN_ENABLE; //扫描
adc_handle.Init .ContinuousConvMode = ENABLE; //连续转换
adc_handle.Init.NbrOfConversion = 2; //转换个数为2
adc_handle.Init.DiscontinuousConvMode = DISABLE; //不采用间断模式
adc_handle.Init.NbrOfDiscConversion = 0; //间断模式个数为0
adc_handle.Init.ExternalTrigConv = ADC_SOFTWARE_START; //采用软件触发
HAL_ADC_Init(&adc_handle); //调用初始化函数
//ADC校准
HAL_ADCEx_Calibration_Start(&adc_handle);
}
//DMA配置
void dma_config()
{
__HAL_RCC_DMA1_CLK_ENABLE();
dma_handle.Instance = DMA1_Channel1; //DMA1通道5
dma_handle.Init.Direction = DMA_PERIPH_TO_MEMORY; //从外设到内存
//内存相关配置
dma_handle.Init .MemDataAlignment = DMA_MDATAALIGN_HALFWORD; //数据对齐方式
dma_handle.Init.MemInc = DMA_MINC_ENABLE; //数据增长方式
//外设相关配置
dma_handle.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD; //数据对齐方式
dma_handle.Init.PeriphInc = DMA_PINC_DISABLE; //数据增长方式
//优先级和模式
dma_handle.Init.Priority =DMA_PRIORITY_MEDIUM;
dma_handle.Init.Mode = DMA_CIRCULAR; //循环搬运
//初始化函数
HAL_DMA_Init(&dma_handle);
//链接串口和DMA
__HAL_LINKDMA(&adc_handle, DMA_Handle, dma_handle);
}
//ADC相关硬件配置
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
//确认是否为ADC1
if(hadc->Instance == ADC1){
RCC_PeriphCLKInitTypeDef adc_clk_init = {0};
GPIO_InitTypeDef gpio_init_struct = {0};
//开启ADC1时钟
__HAL_RCC_ADC1_CLK_ENABLE();
//使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
//设置PIN1口,模拟输入模式
gpio_init_struct.Pin = GPIO_PIN_0 | GPIO_PIN_1;
gpio_init_struct.Mode = GPIO_MODE_ANALOG;
//GPIO初始化
HAL_GPIO_Init(GPIOA,&gpio_init_struct);
//设置外设时钟选择为RCC外设ADC时钟
adc_clk_init.PeriphClockSelection = RCC_PERIPHCLK_ADC;
//设置adc时钟分频因子 为6分频
adc_clk_init.AdcClockSelection = RCC_ADCPCLK2_DIV6;
//配置外设时钟
HAL_RCCEx_PeriphCLKConfig(&adc_clk_init);
}
}
//ADC通道配置
void adc_channel_config(ADC_HandleTypeDef* hadc, uint32_t ch,uint32_t rank, uint32_t stime)
{
ADC_ChannelConfTypeDef adc_ch_config = {0};
//设置adc通道参数
adc_ch_config.Channel = ch; //设置通道
adc_ch_config.Rank = rank; //设置通道次序
adc_ch_config.SamplingTime = stime; //设置采样时间
//通道配置
HAL_ADC_ConfigChannel(hadc, &adc_ch_config);
}
//获取ADC的值
uint32_t adc_get_result(uint32_t ch)
{
//配置ADC通道
adc_channel_config(&adc_handle, ch, ADC_REGULAR_RANK_1, ADC_SAMPLETIME_239CYCLES_5);
//开始ADC转换
HAL_ADC_Start(&adc_handle);
//轮询方式等待ADC转换完成
HAL_ADC_PollForConversion(&adc_handle, 10);
//获取ADC转换结果
return (uint16_t)HAL_ADC_GetValue(&adc_handle);
}
//ADC和DMA初始化
void adc_dma_init(void)
{
//ADC配置
adc_config();
//配置ADC通道
adc_channel_config(&adc_handle, ADC_CHANNEL_0, ADC_REGULAR_RANK_1, ADC_SAMPLETIME_239CYCLES_5);
adc_channel_config(&adc_handle, ADC_CHANNEL_1, ADC_REGULAR_RANK_2, ADC_SAMPLETIME_239CYCLES_5);
//DMA配置
dma_config();
//开始ADC-DMA转换
HAL_ADC_Start_DMA(&adc_handle, (uint32_t *)adc_result, 2);
}
//传出adc结果
void adc_result_get(uint16_t *result)
{
memcpy(result, adc_result, sizeof(adc_result));
}
adc.h
#ifndef __ADC_H__
#define __ADC_H__
#include "sys.h"
//ADC和DMA初始化
void adc_dma_init(void);
//传出adc结果
void adc_result_get(uint16_t *result);
#endif
fan.c
#include "fan.h"
#include "sys.h"
//初始化GBIO口函数
void fan_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOA时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_12; //fan对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //推挽输出
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //上拉
gpio_initstruct.Pull = GPIO_PULLUP; //高速
HAL_GPIO_Init(GPIOA, &gpio_initstruct);
//关闭plugin
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_SET);
}
//打开fan的函数
void fan_on(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_RESET); //拉低fan引脚,关闭fan
}
//关闭fan的函数
void fan_off(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_SET); //拉高fan引脚,关闭fan
}
//翻转fan的函数
void fan_toggle(void)
{
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_12); //翻转fan引脚电平
}
//返回fan的状态
uint8_t fan_status_get(void)
{
return (uint8_t)HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_12);
}
fan.h
#ifndef __FAN_H__
#define __FAN_H__
#include "stdint.h"
#define FAN_STATUS_ON 0
#define FAN_STATUS_OFF 0
//初始化GBIO口函数
void fan_init(void);
//打开fan的函数
void fan_on(void);
//关闭fan的函数
void fan_off(void);
//翻转fan的函数
void fan_toggle(void);
//返回继电器的状态
uint8_t fan_status_get(void);
#endif
bluetooth.c
#include "sys.h"
#include "bluetooth.h"
#include "string.h"
#include "stdarg.h"
UART_HandleTypeDef uart2_handle; /* uart2句柄 */
uint8_t uart2_rx_buf[UART2_RX_BUF_SIZE]; /* uart2接收缓冲区 */
uint16_t uart2_rx_len = 0; /* uart2接收字符长度 */
//定义指令数字
uint8_t bt_rx = 0;
/**
* @brief 串口1初始化函数
* @param baudrate: 波特率, 根据自己需要设置波特率值
* @retval 无
*/
void bt_init(uint32_t baudrate)
{
/*UART2 初始化设置*/
uart2_handle.Instance = USART2; /* USART2 */
uart2_handle.Init.BaudRate = baudrate; /* 波特率 */
uart2_handle.Init.WordLength = UART_WORDLENGTH_8B; /* 字长为8位数据格式 */
uart2_handle.Init.StopBits = UART_STOPBITS_1; /* 一个停止位 */
uart2_handle.Init.Parity = UART_PARITY_NONE; /* 无奇偶校验位 */
uart2_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE; /* 无硬件流控 */
uart2_handle.Init.Mode = UART_MODE_TX_RX; /* 收发模式 */
HAL_UART_Init(&uart2_handle); /* HAL_UART_Init()会使能UART2 */
}
/**
* @brief UART2接收缓冲区清除
* @param 无
* @retval 无
*/
void uart2_rx_clear(void)
{
memset(uart2_rx_buf, 0, sizeof(uart2_rx_buf)); /* 清空接收缓冲区 */
uart2_rx_len = 0; /* 接收计数器清零 */
}
/**
* @brief 串口1中断服务函数
* @note 在此使用接收中断及空闲中断,实现不定长数据收发
* @param 无
* @retval 无
*/
void USART2_IRQHandler(void)
{
uint8_t receive_data = 0;
if(__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_RXNE) != RESET){ /* 获取接收RXNE标志位是否被置位 */
if(uart2_rx_len >= sizeof(uart2_rx_buf)) /* 如果接收的字符数大于接收缓冲区大小, */
uart2_rx_len = 0; /* 则将接收计数器清零 */
HAL_UART_Receive(&uart2_handle, &receive_data, 1, 1000); /* 接收一个字符 */
uart2_rx_buf[uart2_rx_len++] = receive_data; /* 将接收到的字符保存在接收缓冲区 */
}
if (__HAL_UART_GET_FLAG(&uart2_handle, UART_FLAG_IDLE) != RESET) /* 获取接收空闲中断标志位是否被置位 */
{
printf("recv: %s\r\n", uart2_rx_buf); /* 将接收到的数据打印出来 */
bt_rx = uart2_rx_buf[0];
uart2_rx_clear();
__HAL_UART_CLEAR_IDLEFLAG(&uart2_handle); /* 清除UART总线空闲中断 */
}
}
////串口2发送函数
//void bt_send(char *send_buf, uint8_t size)
//{
// HAL_UART_Transmit(&uart2_handle, (uint8_t*)send_buf, size, 100);
//}
//串口2发送不定长数据
void bt_send(char *format, ...)
{
uint8_t send_buf[128] = {0};
va_list arg;
va_start(arg, format);
vsprintf((char *)send_buf, format ,arg);
va_end(arg);
HAL_UART_Transmit(&uart2_handle, send_buf, sizeof(send_buf), 100);
}
//传出指令值
uint8_t bt_value_get(void)
{
uint8_t temp;
temp = bt_rx - '0';
bt_rx = 0;
return temp;
}
bluetooth.h
#ifndef __BLUETOOTH_H__
#define __BLUETOOTH_H__
#include "stdio.h"
#include "sys.h"
/* UART收发缓冲大小 */
#define UART2_RX_BUF_SIZE 128
#define UART2_TX_BUF_SIZE 64
void bt_init(uint32_t bound); /* 串口初始化函数 */
////串口2发送函数
//void bt_send(char *send_buf, uint8_t size);
//串口2发送不定长数据
void bt_send(char *format, ...);
#endif
voice.c
#include "voice.h"
//语音模块初始化
void voice_init(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能GPIOA时钟
__HAL_RCC_GPIOB_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = GPIO_PIN_5 | GPIO_PIN_4; //卧室灯对应引脚
gpio_initstruct.Mode = GPIO_MODE_INPUT; //输入模式
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(GPIOB, &gpio_initstruct);
}
//语音模块值返回
uint8_t voice_value_get(void)
{
return ((HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4) << 1) | HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_5));
}
voice.h
#ifndef __VOICE_H__
#define __VOICE_H__
#include "sys.h"
//语音模块初始化
void voice_init(void);
//语音模块值返回
uint8_t voice_value_get(void);
#endif
dht11.c
#include "dht11.h"
#include "delay.h"
#include "string.h"
#include "stdio.h"
//定义温湿度存放变量
char dht11_data[5] = {0};
//设置DHT11GPIO输入
void dht11_gpio_input(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能DHT11端口时钟
DHT11_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = DHT11_PIN; //DHT11对应引脚
gpio_initstruct.Mode = GPIO_MODE_INPUT; //输入
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(DHT11_PORT, &gpio_initstruct);
}
//设置DHT11GPIO输出
void dht11_gpio_output(void)
{
GPIO_InitTypeDef gpio_initstruct;
//使能DHT11端口时钟
DHT11_CLK_ENABLE();
//调用GPIO初始化函数
gpio_initstruct.Pin = DHT11_PIN; //DHT11对应引脚
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP; //输入
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; //高速
gpio_initstruct.Pull = GPIO_PULLUP; //上拉
HAL_GPIO_Init(DHT11_PORT, &gpio_initstruct);
}
//DHT11启动
void dht11_start(void)
{
//启动时序
dht11_gpio_output();
DHT11_DQ_OUT(1);
DHT11_DQ_OUT(0);
delay_ms(20);
DHT11_DQ_OUT(1);
dht11_gpio_input();
while(DHT11_DQ_IN); //等待DHT11拉低电平
while(!DHT11_DQ_IN); //等待DHT11拉高电平
while(DHT11_DQ_IN); //等待DHT11拉低电平
}
//DHT11GPIO读一个字节
uint8_t dht11_read_byte(void)
{
uint8_t temp = 0;
uint8_t i = 0;
uint8_t read_data = 0;
//循环读取8位
for(i = 0; i < 8; i++){
//读取位时序
while(!DHT11_DQ_IN); //等待DHT11拉高电平
delay_us(50);
if(DHT11_DQ_IN == 1){
temp = 1;
while(DHT11_DQ_IN); //等待DHT11拉低电平
}else{
temp = 0;
}
//循环放入读取缓存
read_data = read_data << 1;
read_data |= temp;
}
return read_data;
}
//DHT11读数据
void dht11_read(uint8_t *result)
{
uint8_t i = 0;
__HAL_RCC_AFIO_CLK_ENABLE(); //使能AFIO时钟
__HAL_AFIO_REMAP_SWJ_NOJTAG(); //禁用JTAG接口
//启动DHT11
dht11_start();
//设置GPIO输入模式
dht11_gpio_input();
//循环读取5次字节
for(i = 0; i < 5; i++){
dht11_data[i] = dht11_read_byte();
}
if(dht11_data[0] + dht11_data[1] + dht11_data[2] + dht11_data[3] == dht11_data[4]){
memcpy(result, dht11_data, 4);
printf("\r\n");
printf("湿度:%d.%dRH,",dht11_data[0],dht11_data[1]);
printf("温度:%d.%d℃",dht11_data[2],dht11_data[3]);
printf("\r\n");
}
delay_ms(2000);
}
dht11.h
#ifndef __DHT11_H__
#define __DHT11_H__
#include "sys.h"
#define DHT11_PORT GPIOB
#define DHT11_PIN GPIO_PIN_3
#define DHT11_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE()
#define DHT11_DQ_OUT(x) do{ x ? \
HAL_GPIO_WritePin(DHT11_PORT, DHT11_PIN , GPIO_PIN_SET) : \
HAL_GPIO_WritePin(DHT11_PORT, DHT11_PIN , GPIO_PIN_RESET);\
}while(0)
#define DHT11_DQ_IN HAL_GPIO_ReadPin(DHT11_PORT, DHT11_PIN)
//DHT11读数据
void dht11_read(uint8_t *result);
#endif
esp8266.c
#include "esp8266.h"
#include "stdio.h"
#include "string.h"
#include "delay.h"
#include "stdarg.h"
//定义发送缓存区
uint8_t esp8266_tx_buf[ESP8266_TX_BUF_SIZE] = {0};
//定义接收缓存区
uint8_t esp8266_rx_buf[ESP8266_RX_BUF_SIZE] = {0};
//定义接收长度
uint16_t esp8266_rx_len = 0;
//定义esp8266最新接收数量,数量旧值
uint16_t esp8266_cnt = 0, esp8266_cnt_Pre = 0;
UART_HandleTypeDef esp8266_handle = {0};
//esp8266串口初始化函数
void esp8266_uart_init(uint32_t baudrate)
{
//串口1选择
esp8266_handle.Instance = USART3;
//波特率
esp8266_handle.Init.BaudRate = baudrate;
//字长
esp8266_handle.Init.WordLength = UART_WORDLENGTH_8B;
//停止位
esp8266_handle.Init.StopBits = UART_STOPBITS_1;
//校验位
esp8266_handle.Init.Parity = UART_PARITY_NONE;
//流控
esp8266_handle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
//模式
esp8266_handle.Init.Mode = UART_MODE_TX_RX;
//初始化
HAL_UART_Init(&esp8266_handle);
}
//esp8266中断服务函数
void USART3_IRQHandler(void)
{
//定义接收字符
uint8_t receive_data = 0;
//当接收寄存器不为空的时候
if(__HAL_UART_GET_FLAG(&esp8266_handle, UART_FLAG_RXNE) != RESET){
if(esp8266_cnt >= sizeof(esp8266_rx_buf)){
//接受数量置为零
esp8266_cnt = 0;
}
//接收一个字符
HAL_UART_Receive(&esp8266_handle, &receive_data, 1,1000);
esp8266_rx_buf[esp8266_cnt++] = receive_data;
//再发送出去
//HAL_UART_Transmit(&esp8266_handle,&receive_data, 1,1000);
}
}
//等待接收函数
uint8_t esp8266_wait_receive(void)
{
//如果接收数为零,则返回错误码
if(esp8266_cnt == 0){
return ESP8266_ERROR;
}
//如果接收数量不变,则表示本段接收完成,返回完成码
if(esp8266_cnt == esp8266_cnt_Pre){
esp8266_cnt = 0;
return ESP8266_EOK;
}
//接受数量变了,则将新值赋给旧值,但是没接收完
esp8266_cnt_Pre = esp8266_cnt;
return ESP8266_ERROR;
}
//接收区清空
void esp8266_rx_clear(void)
{
memset(esp8266_rx_buf, 0, sizeof(esp8266_rx_buf));
esp8266_cnt = 0;
}
////esp8266发送
//void esp8266_send_data(char *fmt, ...)
//{
// // 定义可变参数列表变量
// va_list ap;
// // 定义长度变量,用于存储字符串长度
// uint16_t len;
// // 初始化可变参数列表,ap指向fmt后的第一个参数
// va_start(ap, fmt);
// // 使用vsprintf将格式化后的字符串输出到发送缓冲区
// // vsprintf会自动处理可变参数,根据fmt格式字符串将参数格式化后存入缓冲区
// vsprintf((char* )esp8266_tx_buf, fmt, ap);
// // 计算格式化后字符串的长度(不包括字符串结束符'\0')
// len = strlen((const char *)esp8266_tx_buf);
// // 通过UART发送数据
// HAL_UART_Transmit(&esp8266_handle, esp8266_tx_buf, len, 100);
//}
//esp8266发送
void esp8266_send_data(char *data, uint16_t len)
{
esp8266_rx_clear();
HAL_UART_Transmit(&esp8266_handle, (unsigned char*)data, len, 100);
}
//拷贝RXDATA内容
uint16_t esp8266_copy_rxdata(char *data)
{
memcpy(data, esp8266_rx_buf, esp8266_cnt_Pre);
return esp8266_cnt_Pre;
}
//esp8266接收
void esp8266_receive_data(void)
{
if(esp8266_wait_receive() == ESP8266_EOK){
printf("esp8266 rev:%s\r\n",esp8266_rx_buf);
esp8266_rx_clear();
}
}
//esp8266发送函数
uint8_t esp8266_send_command(char *cmd, char *res)
{
uint8_t time_out = 250;
//清空接收缓存区
esp8266_rx_clear();
//发送函数
HAL_UART_Transmit(&esp8266_handle,(uint8_t *)cmd, strlen(cmd),100);
//判断超时
while(time_out--){
//判断是否接收到新数据
if(esp8266_wait_receive() == ESP8266_EOK){
//判断接受的数据是否和要求比较的数据一致
if(strstr((char *)esp8266_rx_buf, res) != NULL){
return ESP8266_EOK;
}
}
delay_ms(10);
}
return ESP8266_ERROR;
}
//测试
uint8_t esp8266_at_test(void)
{
return esp8266_send_command("AT\r\n", "OK");
}
//设置工作模式
uint8_t esp8266_set_mode(uint8_t mode)
{
switch(mode){
case ESP8266_STA_MODE:
return esp8266_send_command("AT+CWMODE=1\r\n", "OK");
case ESP8266_AP_MODE:
return esp8266_send_command("AT+CWMODE=2\r\n", "OK");
case ESP8266_STA_AP_MODE:
return esp8266_send_command("AT+CWMODE=3\r\n", "OK");
default:
return ESP8266_EINVAL;
}
}
//连接网络
uint8_t esp8266_join_ap(char *ssid, char *pwd)
{
char cmd[64];
sprintf(cmd,"AT+CWJAP=\"%s\",\"%s\"\r\n",ssid,pwd);
return esp8266_send_command(cmd,"WIFI GOT IP");
}
//设置连接模式
uint8_t esp8266_connection_mode(uint8_t mode)
{
char cmd[64];
sprintf(cmd,"AT+CIPMUX=%d\r\n",mode);
return esp8266_send_command(cmd,"OK");
}
//连接服务器
uint8_t esp8266_connect_tcp_server(char *server_ip, char *server_port)
{
char cmd[64];
sprintf(cmd, "AT+CIPSTART=\"TCP\",\"%s\",%s\r\n", server_ip, server_port);
return esp8266_send_command(cmd,"CONNECT");
}
//进入透传模式
uint8_t esp8266_enter_unvarnishied(void)
{
uint8_t ret;
ret = esp8266_send_command("AT+CIPMODE=1\r\n","OK");
ret += esp8266_send_command("AT+CIPSEND\r\n",">");
if(ret == ESP8266_EOK){
return ESP8266_EOK;
}else{
return ESP8266_ERROR;
}
}
//esp8266初始化
void esp8266_init(uint32_t baudrate)
{
printf("esp8266初始化开始...\r\n");
//串口初始化
esp8266_uart_init(baudrate);
//配置wifi模块
printf("1. 测试esp8266是否存在\r\n");
while(esp8266_at_test()){
delay_ms(500);
}
printf("2. 设置工作模式为STA...\r\n");
while(esp8266_set_mode(ESP8266_STA_MODE)){
delay_ms(500);
}
printf("3. 设置单链路链接模式...\r\n");
while(esp8266_connection_mode(ESP8266_SINGLE_CONNECTION)){
delay_ms(500);
}
printf("4. 连接wifi,SSID:%s, PWD:%s...\r\n",WIFI_SSID,WIFI_PWD);
while(esp8266_join_ap(WIFI_SSID,WIFI_PWD)){
delay_ms(2000);
}
printf("5. 连接云服务器,server_ip:%s,server_port:%s...\r\n",TCP_SERVER_IP,TCP_SERVER_PORT);
while(esp8266_connect_tcp_server(TCP_SERVER_IP, TCP_SERVER_PORT)){
delay_ms(500);
}
printf("6. 进入透传模式...\r\n");
while(esp8266_enter_unvarnishied()){
delay_ms(500);
}
printf("ESP8266已经连接服务器并进入透传模式\r\n");
printf("ESP8266初始化完成\r\n");
}
////测试函数
//void esp8266_test(void)
//{
// esp8266_send_data("This is from esp8266\r\n",20);
// esp8266_receive_data();
//}
esp8266.h
#ifndef __ESP8266_H__
#define __ESP8266_H__
#include "stdio.h"
#include "sys.h"
//定义发送接收缓存大小
#define ESP8266_RX_BUF_SIZE 128
#define ESP8266_TX_BUF_SIZE 64
//定义状态标志
#define ESP8266_EOK 0
#define ESP8266_ERROR 1
#define ESP8266_ETIMEOUT 2
#define ESP8266_EINVAL 3
//定义AT指令填充字段
#define ESP8266_STA_MODE 1
#define ESP8266_AP_MODE 2
#define ESP8266_STA_AP_MODE 3
#define ESP8266_SINGLE_CONNECTION 0
#define ESP8266_MULTI_CONNECTION 1
#define WIFI_SSID "HUAWEI Mate 60 Pro"
#define WIFI_PWD "88888888"
#define TCP_SERVER_IP "mqtts.heclouds.com"
#define TCP_SERVER_PORT "1883"
//esp8266初始化
void esp8266_init(uint32_t baudrate);
//esp8266接收
void esp8266_receive_data(void);
//测试函数
void esp8266_test(void);
//esp8266发送
void esp8266_send_data(char *data, uint16_t len);
//拷贝RXDATA内容
uint16_t esp8266_copy_rxdata(char *data);
//等待接收函数
uint8_t esp8266_wait_receive(void);
#endif
onenet.c
#include "onenet.h"
#include "esp8266.h"
char MQTT_ClientID[100]; //MQTT_客户端ID
char MQTT_UserName[100]; //MQTT_用户名
char MQTT_PassWord[200]; //MQTT_密码
uint8_t *mqtt_rxbuf;
uint8_t *mqtt_txbuf;
uint16_t mqtt_rxlen;
uint16_t mqtt_txlen;
uint8_t _mqtt_txbuf[512];//发送数据缓存区
uint8_t _mqtt_rxbuf[512];//接收数据缓存区
typedef enum
{
//名字 值 报文流动方向 描述
M_RESERVED1 =0 , // 禁止 保留
M_CONNECT , // 客户端到服务端 客户端请求连接服务端
M_CONNACK , // 服务端到客户端 连接报文确认
M_PUBLISH , // 两个方向都允许 发布消息
M_PUBACK , // 两个方向都允许 QoS 1消息发布收到确认
M_PUBREC , // 两个方向都允许 发布收到(保证交付第一步)
M_PUBREL , // 两个方向都允许 发布释放(保证交付第二步)
M_PUBCOMP , // 两个方向都允许 QoS 2消息发布完成(保证交互第三步)
M_SUBSCRIBE , // 客户端到服务端 客户端订阅请求
M_SUBACK , // 服务端到客户端 订阅请求报文确认
M_UNSUBSCRIBE , // 客户端到服务端 客户端取消订阅请求
M_UNSUBACK , // 服务端到客户端 取消订阅报文确认
M_PINGREQ , // 客户端到服务端 心跳请求
M_PINGRESP , // 服务端到客户端 心跳响应
M_DISCONNECT , // 客户端到服务端 客户端断开连接
M_RESERVED2 , // 禁止 保留
}_typdef_mqtt_message;
//连接成功服务器回应 20 02 00 00
//客户端主动断开连接 e0 00
const uint8_t parket_connetAck[] = {0x20,0x02,0x00,0x00};
const uint8_t parket_disconnet[] = {0xe0,0x00};
const uint8_t parket_heart[] = {0xc0,0x00};
const uint8_t parket_heart_reply[] = {0xc0,0x00};
const uint8_t parket_subAck[] = {0x90,0x03};
/*
函数功能: 初始化阿里云物联网服务器的登录参数
*/
//密码
//加密之前的数据格式: clientId*deviceName*productKey#
// *替换为DeviceName #替换为ProductKey 加密密钥是DeviceSecret 加密方式是HmacSHA1
//PassWord明文= clientIdiot_devicedeviceNameiot_deviceproductKeya1VMIfYeEEE
//hmacsha1加密网站:http://encode.chahuo.com/
//加密的密钥:DeviceSecret
void mqtt_login_init(char *ProductKey,char *DeviceName,char *DeviceSecret)
{
// sprintf(MQTT_ClientID,"%s.%s|securemode=2,signmethod=hmacsha256,timestamp=1695871022945|",ProductKey,DeviceName);
// sprintf(MQTT_UserName,"%s&%s",DeviceName,ProductKey);
// sprintf(MQTT_PassWord,"%s","a8921500839307ec3fedbbcd8c0cbc19f133f68c831dcad41fe13d92dc90b89d");
sprintf(MQTT_ClientID,"%s", DeviceName);
sprintf(MQTT_UserName,"%s", ProductKey);
//sprintf(MQTT_PassWord,"version=2018-10-31&res=products%%2F%s%%2Fdevices%%2F%s&et=2017881776&method=sha1&sign=%s",ProductKey,DeviceName,DEVICE_SECRET);
strcpy(MQTT_PassWord,"version=2018-10-31&res=products%2F0t8qlhHwDA%2Fdevices%2Fmyhome&et=2082789772&method=sha1&sign=6IoPlYQEsVXCykOUJckvoCjQq%2BM%3D");
}
void mqtt_init(void)
{
mqtt_login_init(PRODUCT_KEY,DEVICE_NAME,DEVICE_SECRET);
//缓冲区赋值
mqtt_rxbuf = _mqtt_rxbuf;
mqtt_rxlen = sizeof(_mqtt_rxbuf);
mqtt_txbuf = _mqtt_txbuf;
mqtt_txlen = sizeof(_mqtt_txbuf);
memset(mqtt_rxbuf,0,mqtt_rxlen);
memset(mqtt_txbuf,0,mqtt_txlen);
//无条件先主动断开
mqtt_disconnect();
delay_ms(100);
mqtt_disconnect();
delay_ms(100);
}
/*
函数功能: 登录服务器
函数返回值: 0表示成功 1表示失败
*/
uint8_t mqtt_connect(char *ClientID,char *Username,char *Password)
{
// uint8_t i;
uint8_t j;
int ClientIDLen = strlen(ClientID);
int UsernameLen = strlen(Username);
int PasswordLen = strlen(Password);
int DataLen;
mqtt_txlen=0;
//可变报头+Payload 每个字段包含两个字节的长度标识
DataLen = 10 + (ClientIDLen+2) + (UsernameLen+2) + (PasswordLen+2);
//固定报头
//控制报文类型
mqtt_txbuf[mqtt_txlen++] = 0x10; //MQTT Message Type CONNECT
//剩余长度(不包括固定头部)
do
{
uint8_t encodedByte = DataLen % 128;
DataLen = DataLen / 128;
// if there are more data to encode, set the top bit of this byte
if ( DataLen > 0 )
encodedByte = encodedByte | 128;
mqtt_txbuf[mqtt_txlen++] = encodedByte;
}while ( DataLen > 0 );
//可变报头
//协议名
mqtt_txbuf[mqtt_txlen++] = 0; // Protocol Name Length MSB
mqtt_txbuf[mqtt_txlen++] = 4; // Protocol Name Length LSB
mqtt_txbuf[mqtt_txlen++] = 'M'; // ASCII Code for M
mqtt_txbuf[mqtt_txlen++] = 'Q'; // ASCII Code for Q
mqtt_txbuf[mqtt_txlen++] = 'T'; // ASCII Code for T
mqtt_txbuf[mqtt_txlen++] = 'T'; // ASCII Code for T
//协议级别
mqtt_txbuf[mqtt_txlen++] = 4; // MQTT Protocol version = 4
//连接标志
mqtt_txbuf[mqtt_txlen++] = 0xc2; // conn flags
mqtt_txbuf[mqtt_txlen++] = 0; // Keep-alive Time Length MSB
mqtt_txbuf[mqtt_txlen++] = 100; // Keep-alive Time Length LSB 100S心跳包
mqtt_txbuf[mqtt_txlen++] = BYTE1(ClientIDLen);// Client ID length MSB
mqtt_txbuf[mqtt_txlen++] = BYTE0(ClientIDLen);// Client ID length LSB
memcpy(&mqtt_txbuf[mqtt_txlen],ClientID,ClientIDLen);
mqtt_txlen += ClientIDLen;
if(UsernameLen > 0)
{
mqtt_txbuf[mqtt_txlen++] = BYTE1(UsernameLen); //username length MSB
mqtt_txbuf[mqtt_txlen++] = BYTE0(UsernameLen); //username length LSB
memcpy(&mqtt_txbuf[mqtt_txlen],Username,UsernameLen);
mqtt_txlen += UsernameLen;
}
if(PasswordLen > 0)
{
mqtt_txbuf[mqtt_txlen++] = BYTE1(PasswordLen); //password length MSB
mqtt_txbuf[mqtt_txlen++] = BYTE0(PasswordLen); //password length LSB
memcpy(&mqtt_txbuf[mqtt_txlen],Password,PasswordLen);
mqtt_txlen += PasswordLen;
}
// for(i=0;i<10;i++)
// {
memset(mqtt_rxbuf,0,mqtt_rxlen);
mqtt_send_data(mqtt_txbuf,mqtt_txlen);
// for(j=0;j<10;j++)
// printf("%c",mqtt_txbuf[j]);
for(j=0;j<10;j++)
{
delay_ms(50);
if (esp8266_wait_receive() == ESP8266_EOK)
esp8266_copy_rxdata((char *)mqtt_rxbuf);
//CONNECT
if(mqtt_rxbuf[0]==parket_connetAck[0] && mqtt_rxbuf[1]==parket_connetAck[1] && mqtt_rxbuf[2]==parket_connetAck[2]) //连接成功
{
return 0;//连接成功
}
}
// }
return 1;
}
/*
函数功能: MQTT订阅/取消订阅数据打包函数
函数参数:
topic 主题
qos 消息等级 0:最多分发一次 1: 至少分发一次 2: 仅分发一次
whether 订阅/取消订阅请求包 (1表示订阅,0表示取消订阅)
返回值: 0表示成功 1表示失败
*/
uint8_t mqtt_subscribe_topic(char *topic,uint8_t qos,uint8_t whether)
{
// uint8_t i;
uint8_t j;
mqtt_txlen=0;
int topiclen = strlen(topic);
int DataLen = 2 + (topiclen+2) + (whether?1:0);//可变报头的长度(2字节)加上有效载荷的长度
//固定报头
//控制报文类型
if(whether)mqtt_txbuf[mqtt_txlen++] = 0x82; //消息类型和标志订阅
else mqtt_txbuf[mqtt_txlen++] = 0xA2; //取消订阅
//剩余长度
do
{
uint8_t encodedByte = DataLen % 128;
DataLen = DataLen / 128;
// if there are more data to encode, set the top bit of this byte
if ( DataLen > 0 )
encodedByte = encodedByte | 128;
mqtt_txbuf[mqtt_txlen++] = encodedByte;
}while ( DataLen > 0 );
//可变报头
mqtt_txbuf[mqtt_txlen++] = 0; //消息标识符 MSB
mqtt_txbuf[mqtt_txlen++] = 0x01; //消息标识符 LSB
//有效载荷
mqtt_txbuf[mqtt_txlen++] = BYTE1(topiclen);//主题长度 MSB
mqtt_txbuf[mqtt_txlen++] = BYTE0(topiclen);//主题长度 LSB
memcpy(&mqtt_txbuf[mqtt_txlen],topic,topiclen);
mqtt_txlen += topiclen;
if(whether)
{
mqtt_txbuf[mqtt_txlen++] = qos;//QoS级别
}
// for(i=0;i<10;i++)
// {
memset(mqtt_rxbuf,0,mqtt_rxlen);
mqtt_send_data(mqtt_txbuf,mqtt_txlen);
for(j=0;j<10;j++)
{
delay_ms(50);
if (esp8266_wait_receive() == ESP8266_EOK)
esp8266_copy_rxdata((char *)mqtt_rxbuf);
if(mqtt_rxbuf[0]==parket_subAck[0] && mqtt_rxbuf[1]==parket_subAck[1]) //订阅成功
{
return 0;//订阅成功
}
}
// }
return 1; //失败
}
//MQTT发布数据打包函数
//topic 主题
//message 消息
//qos 消息等级
uint8_t mqtt_publish_data(char *topic, char *message, uint8_t qos)
{
int topicLength = strlen(topic);
int messageLength = strlen(message);
static uint16_t id=0;
int DataLen;
mqtt_txlen=0;
//有效载荷的长度这样计算:用固定报头中的剩余长度字段的值减去可变报头的长度
//QOS为0时没有标识符
//数据长度 主题名 报文标识符 有效载荷
if(qos) DataLen = (2+topicLength) + 2 + messageLength;
else DataLen = (2+topicLength) + messageLength;
//固定报头
//控制报文类型
mqtt_txbuf[mqtt_txlen++] = 0x30; // MQTT Message Type PUBLISH
//剩余长度
do
{
uint8_t encodedByte = DataLen % 128;
DataLen = DataLen / 128;
// if there are more data to encode, set the top bit of this byte
if ( DataLen > 0 )
encodedByte = encodedByte | 128;
mqtt_txbuf[mqtt_txlen++] = encodedByte;
}while ( DataLen > 0 );
mqtt_txbuf[mqtt_txlen++] = BYTE1(topicLength);//主题长度MSB
mqtt_txbuf[mqtt_txlen++] = BYTE0(topicLength);//主题长度LSB
memcpy(&mqtt_txbuf[mqtt_txlen],topic,topicLength);//拷贝主题
mqtt_txlen += topicLength;
//报文标识符
if(qos)
{
mqtt_txbuf[mqtt_txlen++] = BYTE1(id);
mqtt_txbuf[mqtt_txlen++] = BYTE0(id);
id++;
}
memcpy(&mqtt_txbuf[mqtt_txlen],message,messageLength);
mqtt_txlen += messageLength;
// int i = 0;
// for(i=0;i<mqtt_txlen;i++)
// printf("%02X ", mqtt_txbuf[i]);
// printf("\r\n");
mqtt_send_data(mqtt_txbuf,mqtt_txlen);
return mqtt_txlen;
}
uint8_t mqtt_receive_handle(uint8_t *data_received, Mqtt_RxData_Type *rx_data)
{
uint8_t *p;
uint8_t encodeByte = 0;
uint32_t multiplier = 1, Remaining_len = 0;
uint8_t QS_level = 0;
p = data_received;
memset(rx_data, 0, sizeof(Mqtt_RxData_Type));
//解析接收数据
if((*p != 0x30)&&(*p != 0x32)&&(*p != 0x34)) //不是发布报文头
return 1;
if(*p != 0x30) QS_level = 1; //标记qs等级不为0
p++;
//提取剩余数据长度
do{
encodeByte = *p++;
Remaining_len += (encodeByte & 0x7F) * multiplier;
multiplier *= 128;
if(multiplier > 128*128*128) //超出剩余长度最大4个字节的要求,错误
return 2;
}while((encodeByte & 0x80) != 0);
//提取主题数据长度
rx_data->topic_len = *p++;
rx_data->topic_len = rx_data->topic_len * 256 + *p++;
//提取主题
memcpy(rx_data->topic,p,rx_data->topic_len);
p += rx_data->topic_len;
if(QS_level != 0) //跳过报文标识符
p += 2;
//提取payload
rx_data->payload_len = Remaining_len - rx_data->topic_len - 2;
memcpy(rx_data->payload, p, rx_data->payload_len);
// printf("topic: %s\r\n", rx_data->topic);
// printf("topic_len: %d\r\n", rx_data->topic_len);
// printf("payload: %s\r\n", rx_data->payload);
// printf("payload_len: %d\r\n", rx_data->payload_len);
return 0;
}
void mqtt_send_response(uint8_t *id)
{
char buf[128] = {0};
sprintf(buf,"{\"id\":\"%s\",\"code\":200,\"msg\":\"success\"}",id);
mqtt_publish_data(RELY_PUBLISH_TOPIC,(char *)buf,0);
printf("\r\n发布数据:\r\n");
printf((const char *)buf); //发布的数据打印出来
printf("\r\n");
}
void mqtt_send_heart(void)
{
mqtt_send_data((uint8_t *)parket_heart,sizeof(parket_heart));
}
void mqtt_disconnect(void)
{
mqtt_send_data((uint8_t *)parket_disconnet,sizeof(parket_disconnet));
}
void mqtt_send_data(uint8_t *buf,uint16_t len)
{
esp8266_send_data((char *)buf, len);
}
onenet.h
#ifndef _ONENET_H_
#define _ONENET_H_
#include "string.h"
#include "stdio.h"
#include "stdlib.h"
#include "stdarg.h"
#include "delay.h"
#define BYTE0(dwTemp) (*( char *)(&dwTemp))
#define BYTE1(dwTemp) (*((char *)(&dwTemp) + 1))
#define BYTE2(dwTemp) (*((char *)(&dwTemp) + 2))
#define BYTE3(dwTemp) (*((char *)(&dwTemp) + 3))
extern char MQTT_ClientID[100]; //MQTT_客户端ID
extern char MQTT_UserName[100]; //MQTT_用户名
extern char MQTT_PassWord[200]; //MQTT_密码
typedef struct
{
uint8_t topic[512];
uint16_t topic_len;
uint8_t payload[512];
uint16_t payload_len;
} Mqtt_RxData_Type;
//云服务器的设备证书
#define PRODUCT_KEY "0t8qlhHwDA"
#define DEVICE_NAME "myhome"
#define DEVICE_SECRET "6IoPlYQEsVXCykOUJckvoCjQq%2BM%3D"
//订阅与发布的主题
#define RELY_PUBLISH_TOPIC "$sys/0t8qlhHwDA/myhome/thing/property/set_reply" //属性设置应答订阅主题,onenet studio定义好的
#define SET_TOPIC "$sys/0t8qlhHwDA/myhome/thing/property/set"
#define POST_TOPIC "$sys/0t8qlhHwDA/myhome/thing/property/post"
//事件上报主题
#define EVENT_PUBLISH_TOPIC "$sys/0t8qlhHwDA/myhome/thing/event/post" //发布主题,onenet studio定义好的
//阿里云用户名初始化
void mqtt_login_init(char *ProductKey,char *DeviceName,char *DeviceSecret);
//MQTT协议相关函数声明
uint8_t mqtt_publish_data(char *topic, char *message, uint8_t qos);
uint8_t mqtt_subscribe_topic(char *topic,uint8_t qos,uint8_t whether);
void mqtt_init(void);
uint8_t mqtt_connect(char *ClientID,char *Username,char *Password);
void mqtt_send_heart(void);
void mqtt_disconnect(void);
void mqtt_send_data(uint8_t *buf,uint16_t len);
void mqtt_send_response(uint8_t *id);
uint8_t mqtt_receive_handle(uint8_t *data_received, Mqtt_RxData_Type *rx_data);
#endif
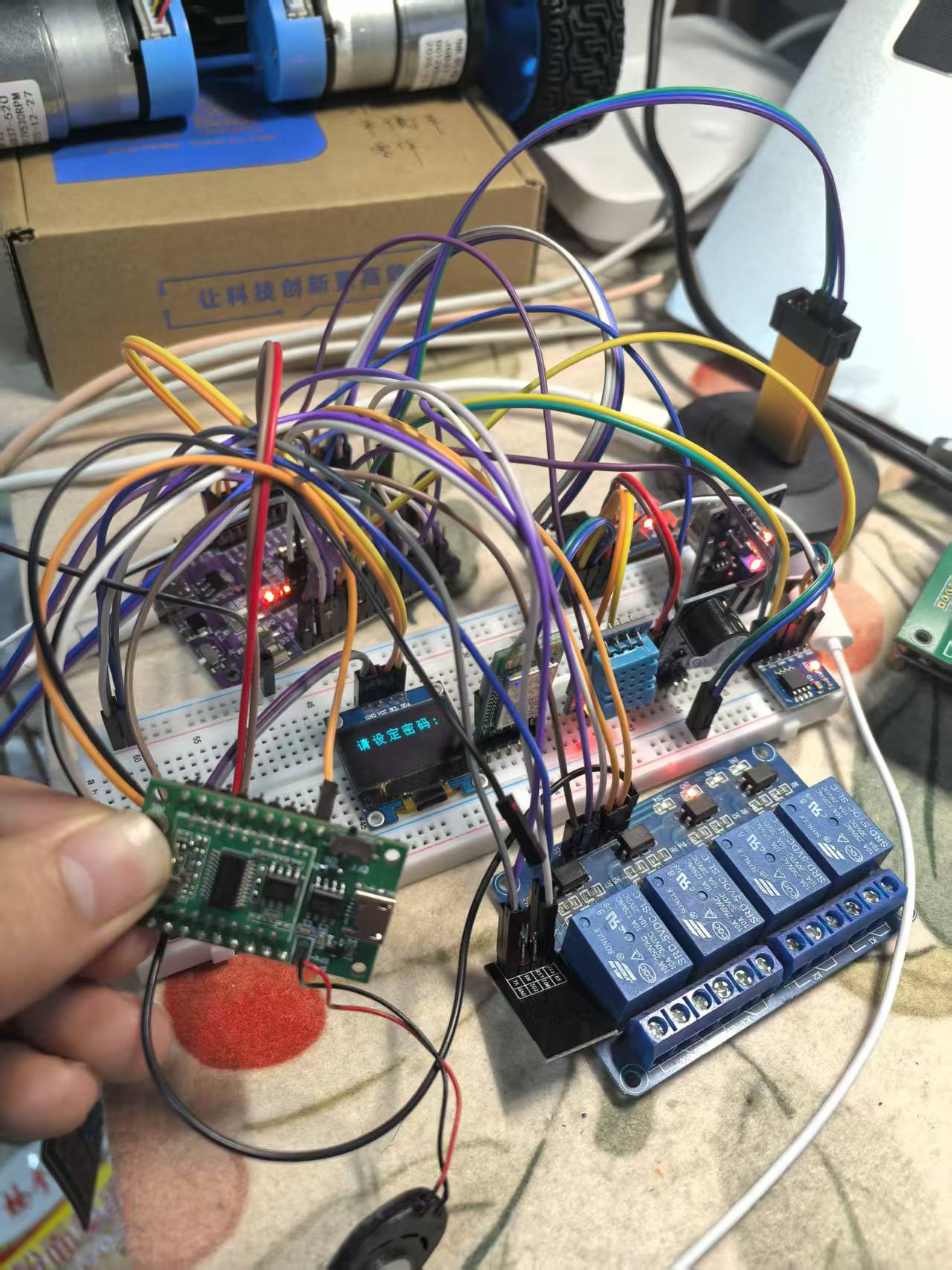
六、实物图

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 3
3 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)