360 HBox算力调度平台万卡规模高效调度方案深度解析
HBox 算力调度平台构建了一套面向万卡规模 AI 集群的全链路调度体系,本文介绍了 Hbox 的大部分算力调度能力:三池模型保障 SLA优先级抢占保障关键生产业务网络拓扑与 NUMA 双感知MIG + vGPU 虚拟化融合GPU与CPU 灵活配比调度……通过上述能力的协同运作,HBox 算力调度平台能够在复杂、多变的 AI 负载环境中,实现资源利用率、业务稳定性与调度公平性之间的平衡,为上层训练
1.背景与挑战
随着大模型训练规模从千卡向万卡演进,算力基础设施的主要瓶颈正从“GPU 规模不足”转向“算力调度与资源利用效率不足”。
在实际生产环境中,普遍面临如下问题:
-
GPU 利用率长期低于 60%,大量资源“空跑”
-
高价值训练任务被低优任务排队挤占,SLA 难以保障
-
多机 NCCL 通信受网络拓扑影响严重,性能抖动明显
-
GPU 各类共享机制复杂,使用门槛高
-
NUMA 亲和性调度仅限单节点内生效,集群级调度器无法感知 NUMA 资源
当集群规模达到千卡、万卡级别时:传统 Kubernetes 调度能力已经无法支撑大模型训练的稳定性与效率需求。经过多年在大规模算力调度方向积累的实战经验,360AI开发平台内部打造了一套高效、稳定、易用的能够支撑万卡乃至更大规模的HBox算力调度平台。
2.HBox 算力调度平台
HBox 是面向大规模 AI 集群的一体化算力调度平台,目标不是单点提升 GPU 共享能力,而是系统性解决算力调度问题,整合多种调度功能:
-
算力池化
-
SLA 调度保障
-
网络感知调度
-
GPU 虚拟化整合
-
NUMA 亲和性调度
-
支持国产化芯片
-
自动故障检测
-
等等
通过多维调度协同,实现:在保证任务稳定性的前提下,大幅提高 GPU 资源利用率。
3.资源分类与算力池化
随着集群规模与业务类型的快速增长,算力平台同时承载着大规模训练、在线部署、弹性计算、关键生产及测试验证等多种类型的工作负载。不同任务在性能稳定性、资源独占性、调度灵活性及成本敏感度方面的诉求存在显著差异,若采用单一的资源分配模型,容易导致高优任务受资源争抢影响、普通任务资源浪费或整体利用率下降,难以同时兼顾 SLA 保障、资源效率与运营收益。
HBox 算力调度平台对集群资源进行分类管理,针对异构业务负载在稳定性、隔离性及成本敏感度上的差异,HBox 将集群统一划分为三类资源池:
|
资源类型 |
适用场景 |
资源特点 |
|---|---|---|
|
公共资源 |
普通计算任务、测试任务 |
|
|
池化资源 |
生产任务、弹性任务、无需占用整机资源的任务 |
|
|
独占资源 |
延迟敏感业务、关键生产任务、大规模训练任务、需要占整机资源运行的任务 |
|
对比传统集群调度:
|
维度 |
传统统一集群 |
HBox 三池模型 |
|---|---|---|
|
SLA 保障 |
不稳定 |
按池级保障 |
|
资源利用率 |
30~60% |
70~90% |
|
算力弹性 |
不可控 |
按任务精细复用 |
|
运维成本 |
高 |
平台统一治理 |
Hbox 三池模型能够在保障高性能的前提下,兼顾业务灵活性、资源利用率和收益提升:
-
资源隔离程度由低到高:公共资源 < 池化资源 < 独占资源。
-
不同任务可根据需求选择最合适的资源池,避免资源浪费或任务性能受限,提高用户体验与满意度。
-
合理划分集群资源,不仅降低资源闲置成本,还能通过弹性调度和多租户管理,提高集群整体收益。
4.基于优先级的抢占调度
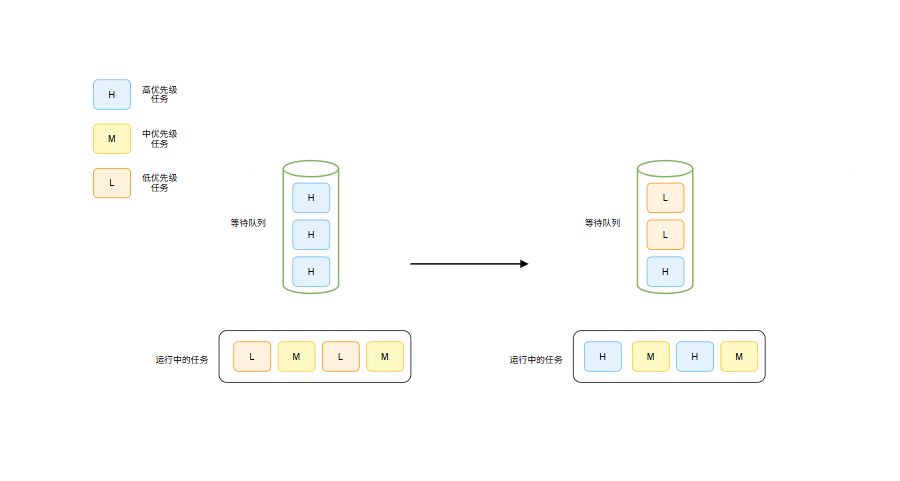
在同一部门的共享资源池中,生产任务、测试任务和开发任务通常并存,经常会发生资源竞争。为了保障关键业务的服务等级协议(SLA),HBox 引入基于队列与优先级的调度模型,对业务进行天然隔离与等级保障。
调度机制:
-
每个部门对应独立资源队列
-
队列内划分三级优先级:
-
高优先级:可抢占低优任务,不可被抢占
-
中优先级:固定保障,不参与抢占
-
低优先级:可以被抢占。
-
下面是高优先级任务抢占低优先级任务的示意图:
在 360 AI 开发平台内部,已启用抢占调度功能,达成如下效果:
-
核心业务抢占成功,无需排队
-
开发、调试任务自动利用碎片算力
-
SLA 可预测性显著提升
5.网络拓扑感知调度
在网络密集型AI大模型训练与推理场景中,传统的资源调度策略往往仅关注计算资源(GPU、内存、CPU)的可用性,忽视了计算节点间的网络拓扑结构对整体性能的关键影响。为此,我们设计并实现了基于网络拓扑感知的调度策略,将集群网络结构纳入调度决策核心考量,显著提升分布式大模型任务的执行效率与资源利用率。
Hbox 算力调度平台通过下列两个组件来实现网络拓扑感知调度:
-
网络拓扑探测器:
-
利用 NVIDIA UFM 实时采集 IB 交换机与端口链路信息
-
构建全局通信拓扑树
-
-
Network Topology Aware Scheduler:
-
调度时综合评估节点通信收益
-
优先将同一作业 Pods 分配至通信最优路径节点
-
网络拓扑探测器:使用 UFM 收集 IB 交换机、IB 网卡的连接情况,然后基于连接情况生成网络拓扑树。树的叶子节点是物理机,非叶子节点是交换机。一个物理节点可能含有多个 IB 网卡,从而连接到多个交换机上。
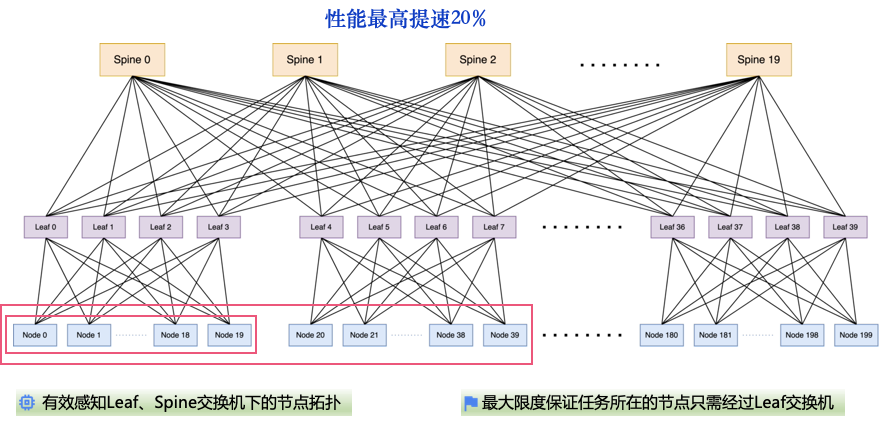
K8s 调度器:Hbox 算力调度平台的 K8s 调度器组件在为分布式大模型任务分配资源时,会根据网络拓扑树来分配资源。用户创建任务时,可以设置下列几种网络拓扑策略:
-
none:无需网络感知。
-
bestEffort:尽量分配通信最优节点
-
singleSwitch:任务的所有 Pod 必须运行在同一个交换机连接的节点上。如果集群无法满足,则禁止为任务分配资源。
实测收益:
-
NCCL 通信 latency 下降 20%
-
集群调度稳定性显著提高
6.GPU 虚拟化
在使用 GPU 进行较大规模的 AI 模型训练时,大量的训练数据被 GPU 并行批处理,GPU 可以被充分的使用。但是,对于有些计算,例如交互式的 Notebook,小规模或者低使用量的模型推理服务,经常只需要使用 GPU 的部分计算能力。在这些情况下,如果能够让多个计算任务共享使用 GPU,将能极大地提高 GPU 的利用率,进而获得有益的投资回报率。
6.1 背景-NVIDIA 共享策略
目前,GPU 的主流供应商是 NVIDIA。下面介绍 NVIDIA GPU 提供的几种共享机制:
Time-Slicing
-
描述:Time-Slicing 指多个容器/进程轮流占用同一张物理 GPU 的计算时间片。GPU 不做物理切分,每个 Pod 都看到“完整 GPU”,NVIDIA Driver 根据调度器策略进行上下文切换。
-
优点:
-
部署成本低:不动硬件,只改 Device Plugin 配置。
-
调度弹性极强:容易进行多租户超卖。
-
零硬件门槛:主流型号的GPU都支持
-
-
缺点:
-
无资源隔离:对显存无隔离限制,不可控性极强。
-
显存无法限额:任何 Pod 超用显存都会导致 OOM,导致所有任务崩溃。
-
MPS(Multi-Process Service)
-
描述:GPU 进程级并发共享机制,通过一个 MPS Server 守护进程接管多个 CUDA 进程的 context,把它们合并为一个 context,减少 context 切换开销,提高 GPU 利用率。
-
优点:
-
进程显存限制:可以限制单进程的显存大小。
-
更好性能:消除 CUDA context 的切换开销,相比于 Time-Slicing 有更好的性能。
-
零硬件门槛:主流型号的GPU都支持
-
-
缺点:
-
无容器级别显存限制:当一个容器内启动多个使用 GPU 的进程时,MPS 只能限制每个进程使用的 GPU 显存。
-
MIG(Multi-Instance GPU)
-
描述:硬件级切片,单个 GPU 被分割为最多 7 个独立的计算实例。每个实例拥有:独立 SM、独立显存、独立 cache、独立 context。
-
优点:
-
硬件隔离:并发进程安全运行且互不影响
-
共享技术叠加:每个分区可以叠加使用其它共享技术,例如 vGPU,time-slicing, MPS。
-
分区监控:在分区级别提供监控和遥测(monitoring & telemetry)数据
-
-
缺点:
-
硬件门槛高:只有A系列及以上型号的卡支持
-
切片规格固定:切片方式并不灵活,有可能造成资源浪费。详细切分方式见 https://docs.nvidia.com/datacenter/tesla/mig-user-guide/supported-mig-profiles.html。
-
切分变更成本大:GPU 闲置情况下,才能更换切分方式。
-
vGPU
-
描述:虚拟化技术,通过 借助 hypervisor + NVIDIA vGPU Manager 将一个物理 GPU 映射成多个虚拟 GPU。它对具有完整输入输出内存管理单元 (IOMMU) 保护的 VM (Virtual Machine) 提供支持,使得这些 VM 能够同时、直接地访问单个物理 GPU
-
优点:
-
完整虚拟化:为每个虚拟机提供独立的虚拟 GPU 设备。
-
隔离性强:每个 vGPU 拥有独立显存配额,计算调度和地址空间隔离,工作负载互不可见。
-
动态切分:单物理卡可以动态切分成多个 vGPU。
-
-
缺点:
-
性能损耗较大(10–20%+):完整虚拟化层和中间调度开销、上下文切换和指令转发开销。
-
管理复杂:部署与运维复杂度较高。需部署并维护 Hypervisor;vGPU Manager 驱动与宿主机内核强绑定;Guest OS 需安装对应 vGPU Driver;Driver 版本、内核版本、Hypervisor 需严格匹配。
-
商用授权昂贵:部署 vGPU 需要额外的软件授权费用。
-
6.2 HBox 虚拟化策略
Hbox 算力调度平台集成 NVIDIA MIG与 HAMi vGPU 两种主流 GPU 虚拟化方案,构建了一套多层次、多场景的 GPU 资源管理与调度体系。这两种技术在架构设计、资源隔离机制和适用场景上形成互补,为用户提供从物理级隔离到虚拟化共享的全栈 GPU 资源解决方案。
NVIDIA MIG:Hbox 平台将 MIG 实例作为底层的、可被调度的离散资源单元进行管理。
-
特点:
-
硬件隔离: 每个 MIG 实例拥有独立的流处理器(SMs)、二级缓存(L2 Cache)和显存带宽(DRAM Bandwidth)。
-
安全可靠:实例间无法互相访问内存或计算单元
-
性能稳定:每个实例提供可预测的性能表现
-
-
适用场景
-
核心业务推理:对稳定性和隔离性要求极高的线上推理服务。
-
多租户环境:为不同租户提供物理隔离的 GPU 资源,保障数据安全与性能。
-
HPC与高性能训练:需要独占部分 GPU 资源且要求稳定性能的训练任务。
-
HAMi vGPU:Hbox 平台引入 HAMi(Heterogeneous AI Computing Virtualization Middleware)作为软件定义的虚拟化层,通过拦截 CUDA API 指令和显存管理,实现了超越物理限制的细粒度资源切分与共享。
-
特点:
-
细粒度切分: 不同于 MIG 的固定规格切分,HAMi 支持以 1% 为单位的算力切分和以 MB 为单位的显存切分,能够极其精准地匹配业务需求,拒绝资源虚占。
-
使用灵活: 用户无需感知底层物理 GPU 型号与拓扑,可按标准化的 vGPU 规格(如“8GB-算力型”)申请资源,实现业务的快速部署与弹性伸缩。
-
广泛兼容性: 不受限于特定高端 GPU 架构,可完美支持多种类型显卡。
-
-
适用场景:
-
开发与调试环境: 针对代码调试、Jupyter Notebook 等交互式任务,这些任务通常占用显存小且算力利用率低,使用 HAMi 可实现极高的资源复用率。
-
中小规模推理与边缘场景: 对轻度算力需求的批量推理任务,或资源受限的边缘节点,通过 vGPU 实现成本最优的资源供给。
-
推荐的 GPU 使用方案:
|
场景 |
推荐方案 |
|---|---|
|
Notebook |
HAMi |
|
轻量推理 |
HAMi |
|
SLA 严格推理 |
MIG |
|
大规模训练 |
独占 GPU |
总结:Hbox 算力调度平台通过统一的 GPU 设备插件与资源模型,将 NVIDIA MIG 与 HAMi vGPU 两种不同层级的虚拟化能力收敛到同一调度体系中,对上层调度器和用户屏蔽底层实现差异。用户仅需按标准化 vGPU 规格申请资源,即可完成从 Notebook 开发、轻量推理到 SLA 严格推理及训练任务的全场景算力调度。
7.NUMA 拓扑感知调度
在 GPU 显存和 CPU 内存频繁交互的场景下,如果任务被分配跨 NUMA 节点的 GPU、内存、CPU,会导致访问延迟高、带宽低,从而降低任务的运行效率。HBox 算力调度平台对 NUMA 拓扑感知调度的支持:
-
现状:目前支持单节点上的 NUMA 拓扑调度。
-
未来计划:通过改造 Kubernetes 调度器 + Device Plugin,实现集群级别的 NUMA 亲和性调度。
7.1 现状
目前,HBox 算力调度平台已在单节点范围内启用 NUMA(Non-Uniform Memory Access)拓扑感知调度能力,通过对 Kubernetes 节点资源管理组件的精细化配置,实现 CPU、内存、GPU等关键资源在 NUMA 节点内的就近分配,从而提升业务负载的性能稳定性与可预测性。
1.NUMA 拓扑调度基础配置
在节点层面,HBox 平台对 kubelet 进行了如下关键配置:
-
CPU Manager Policy:static。为符合条件的 Pod 分配独占 CPU 核心,基于 cpuset 实现精确的 CPU 绑定,是 NUMA 感知调度生效的前置条件。
-
Topology Manager Policy:best-effort。在 Pod 创建阶段,尽可能对齐 CPU、内存、GPU设备资源的 NUMA 拓扑关系,在不影响调度成功率的前提下,最大化 NUMA 本地性收益。
通过上述配置,kubelet 在节点内资源分配阶段具备了 NUMA 感知能力,为后续性能优化奠定基础。
2.用户任务侧约束要求
在 HBox AI 平台提交的计算任务都满足下列条件:
-
Pod 的资源规格满足 Guaranteed QoS。
-
CPU 资源以整数核形式申请
3.NUMA 实践中的关键配置经验
在实际生产环境中,除了基础 NUMA 功能的启用,HBox 平台还总结并沉淀了以下重要实践经验。
经验一:关闭 lxcfs
-
在 NUMA 敏感场景中,建议关闭 lxcfs。
-
原因:lxcfs 通过 FUSE 虚拟化 /proc 与 /sys 文件系统,为容器提供基于 cgroup 视角的资源视图。这一机制在限制容器资源观测性的同时,会对 NUMA 拓扑信息进行裁剪或重构。
-
影响机制:
-
lxcfs 会重写
/sys/devices/system/node等 NUMA 相关路径; -
用户态程序(如 NUMA 感知的运行时、计算框架或库)基于这些信息进行 NUMA 优化决策;
-
虚拟化后的拓扑信息可能导致用户态对 NUMA 架构产生误判,从而削弱甚至抵消 NUMA 亲和性优化效果。
-
经验二:合理配置 NPS(NUMA Per Socket)
-
通过合理设置 NPS,可从硬件层面优化 NUMA 拓扑结构。
-
原因:NPS 是服务器 BIOS 层面提供的 NUMA 划分策略,用于控制每个 CPU Socket 被划分成的 NUMA 节点数量。NPS 的设置直接决定了操作系统和 Kubernetes 所感知到的 NUMA 拓扑形态。
-
实践建议:根据主板拓扑结构、CPU 型号、PCIe 设备分布(如 GPU) 以及 业务负载特性,选择合适的 NPS 值;
总结:通过 kubelet NUMA 感知配置 + 任务侧资源约束 + lxcfs 行为控制 + BIOS 层 NPS 调优的协同,HBox 算力调度平台在单节点范围内构建了一套可落地、可验证、可持续演进的 NUMA 拓扑调度实践,为高性能计算、GPU 推理与训练等场景提供了坚实的系统基础。
7.2 计划
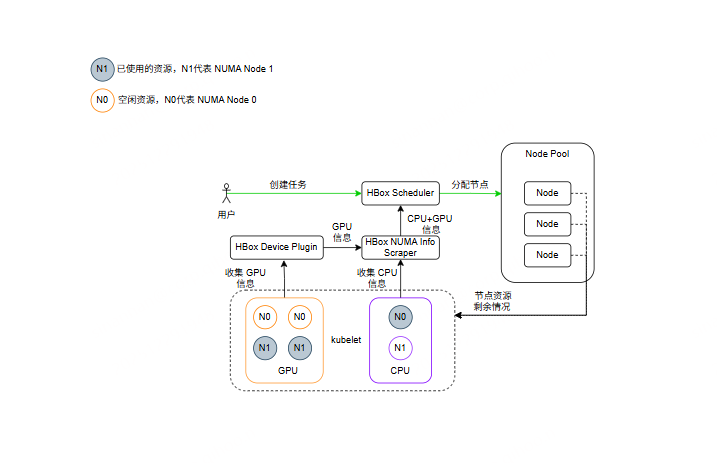
未来,HBox 算力调度平台会实现集群级的 NUMA 调度能力。在集群层面,HBox 调度器具备对 CPU 与 GPU NUMA 拓扑资源状态的全局感知能力,能够在调度决策阶段综合考虑各节点的 NUMA 资源剩余情况,精确筛选满足拓扑约束条件的最优节点,避免将 NUMA 不匹配的负载调度至不合适的节点,降低跨 NUMA 访问带来的性能损耗。
设计架构:
实现原理:
NUMA 拓扑状态采集
-
CPU NUMA 信息收集:HBox 组件在节点侧持续采集 CPU 在各 NUMA node 上的可用核数、已分配情况等信息,形成细粒度的 NUMA 资源视图。
-
GPU NUMA 信息解析:通过对 Kubernetes Device Plugin 进行适配与增强,HBox 从 kubelet 获取 GPU 的实际分配状态,并结合 GPU NUMA 拓扑关系,解析出各 NUMA node 上 GPU 资源的剩余情况。
-
通过上述机制,HBox 在集群层面构建了统一的 CPU 与 GPU NUMA 资源模型。
集群调度器的 NUMA 感知决策
-
集群调度器在执行节点筛选与优选时:
-
评估 CPU 与 GPU 在各 NUMA node 上的可用资源;
-
对候选节点进行 NUMA 亲和性打分,优先选择能够在单一或最优 NUMA 拓扑内满足资源需求的节点;
-
在满足功能性调度约束的前提下,最大化 CPU–GPU 本地性和资源连续性。
-
-
该机制使 NUMA 拓扑约束在调度阶段即被显式纳入考量,而非完全依赖节点内的事后修正。
8.GPU与CPU灵活配比调度
现状:在传统 AI 基础设施中,计算资源通常以静态规格、固定配额的方式进行分配,在 GPU 节点上,调度系统根据任务申请的 GPU 数量静态分配固定数量的 CPU 与内存资源,这会导致 GPU 节点上 CPU 资源的浪费。以 GPU 密集型任务(如大模型推理)为例:
-
GPU 利用率往往接近饱和
-
实际 CPU 仅承担少量控制逻辑与任务编排工作
-
大量已分配的 CPU 核心长期处于低负载甚至空闲状态
HBox 算力调度平台计划提供并完善 GPU、CPU 灵活配比调度能力,使得 CPU 任务运行在 GPU 节点上,充分利用 GPU 任务未使用的 CPU 资源,提供集群资源利用率。集群中会划分出一部分 GPU、CPU灵活配比调度的节点,这些节点可以同时运行 GPU 任务和 CPU 任务:
-
GPU 任务:以 GPU 计算为主的任务,如模型训练与大模型推理。HBox 为这些任务分配有限的 CPU 资源。
-
CPU 任务:以 CPU 计算为主,如数据预处理、特征工程、离线分析、分布式PD分离中的proxy等。
这种灵活的调度机制可以:
-
充分利用 CPU 算力: 以前闲置的 CPU 核心现在成了处理大数据预处理的“主力军”,真正实现了节点内部的资源闭环。
-
缩短任务周期: 更多的 CPU 任务无需排队等待专属 CPU 节点,利用 GPU 节点的剩余 CPU 资源即可即时启动,加速了 AI 开发的全链路流程。
-
提高集群利用率:集群整体 CPU 利用率不再受 GPU 任务的限制,大幅提升了资源投资回报率。
9.国产化芯片调度支持
HBox算力调度平台在国产化芯片的适配、支持上也做了很多工作,其中国产化芯片的调度是重要的一项工作内容。目前HBox算力调度平台在昇腾910B系列、310P系列的调度及使用上都积累了大量的经验。
昇腾系列AI处理器的特点:
-
内部处理器之间采用HCCS方式连接
-
每台物理设备具备8颗或16颗处理器,两个HCCS,每个HCCS存在4颗或8颗处理器,同一HCCS内处理器可做数据交换,不同HCCS内处理器不能直接通信,需要通过PCIe或节点上的高性能网络经过交换机进行通信
基于昇腾AI处理器的上述特点,需要在创建昇腾AI任务时,尽可能将任务分配到同一个HCCS互联的处理器上。为适配这一场景,提升昇腾AI处理器在AI训推中的性能,华为开源了ascend-for-volcano调度插件。该插件基于开源Volcano调度的插件机制,增加昇腾处理器的亲和性调度,最大化发挥昇腾处理器的计算性能。HBox算力调度平台正是基于此方案,进行了大量的验证、实战,保证了昇腾AI训推任务的高效稳定运行。
未来,HBox算力调度平台还会在国产化芯片上持续投入,丰富支持的芯片类型比如海光DCU系列等。除此之外还会在国产化芯片的虚拟化、资源共享方面做更多的工作,更好的助力国产化芯片的落地应用。
10.稳定性建设
为保障大规模 GPU 集群在高负载、长时间运行场景下的稳定性,HBox 算力调度平台围绕 “故障可感知、风险可隔离、问题可自愈、状态可追溯” 的目标,构建了一套覆盖硬件层、驱动层、通信层与 Kubernetes 调度层 的算力稳定性监控与处置体系,并将该体系与AI任务调度相结合,充分保证大规模AI训推任务的稳定性。
该体系以 qihoo-smi 节点守护组件为核心,对 GPU、NVLink、网卡及关键系统服务进行持续巡检,并与调度系统深度联动,实现故障节点的自动隔离与业务保护。
10.1 异构算力环境的深度适配
HBox 目前已全面适配主流高性能计算机型,确保在不同算力架构下监控指标的一致性:
-
适配机型:包括 NVIDIA A100、A800、H800、H100、H200 、H20 以及 L20 等。
-
部署机制:通过 K8s 标签 qihoo.net/qihoo-smi.deploy
: "true"精确控制监控组件在特定节点上的部署。
10.2 多维度的故障监测体系
平台将故障细分为 GPU、网卡、慢节点及系统组件四大类,实现了从物理层到 K8s 资源层的深度穿透。
GPU 故障检测与处理
针对 GPU 资源,平台提供了极其细腻的监控策略:
-
基础故障(掉卡、NVLink 异常):系统每分钟执行一次检测。一旦发现物理层面掉卡或 NVLink 状态异常,将立即执行 Cordon 节点操作并触发报警,防止新任务调度至异常节点。
-
显存故障(ECC):涵盖单位/双位不可校验错误及
nvidia-smi报错。对于影响较大的双位 ECC 错误,采取 Cordon 隔离策略,并探索在 GPU 无业务进程时自动进行重置自愈。 -
关键服务(Nvidia-Fabricmanager):针对该服务的退出问题,平台通过修改
systemd配置实现进程崩溃后的自动拉起(Restart=always),并同步发出告警通知。 -
XID 错误捕捉:实时监控 Xid 74、109、79 等典型错误(如 GPU 掉线或上下文切换超时),及时隔离故障节点。
网络与扩展资源监控
AI 集群对带宽和拓扑极度敏感,HBox 专门强化了网卡与算力资源的联动监控:
-
Mellanox 网卡监控:支持网卡服务降级(Downgraded)与断连(Down)检测。当网卡恢复正常(Up)时,系统支持自动执行 Uncordon 恢复节点调度。
-
内核模块自愈:如发现
nvidia_peermem模块未加载,系统将触发自动修复逻辑重新加载内核模块。 -
K8s 资源对齐:针对 mlx 扩展资源在 K8s 中显示为零的问题,平台通过升级设备插件并配合
qihoo-smi检测,确保网络资源在调度层可见。
性能衰减与集群稳定性监控
-
慢节点检测(NCCL-Tests):目前已上线针对 MPI 多机任务的性能检测,通过自动化测试发现集群中的性能“长尾”节点,避免单一节点的带宽瓶颈拖慢整体训练速度。
-
API-Server 连接性:系统持续监测节点与 K8s 控制平面的通信状态。若连接失败持续 3 次,将触发报警,但考虑到业务稳定性,默认不进行 Cordon 操作,仅通过自愈逻辑尝试修复。
智能化告警与精细化管理
-
告警闭环:统一规范告警格式,支持告警恢复通知。当节点 Uncordon 时,系统会自动关联 ES 中的异常记录并发送恢复提醒。
-
豁免机制:针对部分已知但暂不影响业务、或无法立即修复的故障,支持通过标签 qihoo.net/qihoo-smi
: exempt实现节点豁免检测,避免不必要的 cordon 影响作业运行。 -
数据分析:所有异常告警信息同步存储于 Elasticsearch,为后续的故障频率统计和硬件选型优化提供数据支持。
11.总结
HBox 算力调度平台构建了一套面向万卡规模 AI 集群的全链路调度体系,本文介绍了 Hbox 的大部分算力调度能力:
-
三池模型保障 SLA
-
优先级抢占保障关键生产业务
-
网络拓扑与 NUMA 双感知
-
MIG + vGPU 虚拟化融合
-
GPU与CPU 灵活配比调度
-
……
通过上述能力的协同运作,HBox 算力调度平台能够在复杂、多变的 AI 负载环境中,实现资源利用率、业务稳定性与调度公平性之间的平衡,为上层训练与推理业务提供稳定、高效的算力支撑。
未来计划-硬件管理与资源分配机制的演进:
-
目前,HBox 算力调度平台基于 Kubernetes 设备插件(Device Plugin)机制对 GPU 等硬件加速资源进行管理与分配。设备插件模式在当前 Kubernetes 生态中被广泛采用,但其资源模型以静态声明与节点级注册为核心,在资源表达能力、动态调度灵活性以及复杂硬件拓扑感知等方面存在一定局限。
-
面向未来,HBox 计划引入 Kubernetes 动态资源分配(Dynamic Resource Allocation)机制,基于声明式资源请求与调度器原生协同,实现对硬件资源更精细化、动态化的分配与管理,以更好地支撑多样化和复杂化的算力使用场景。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 11
11 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)