马斯克押注“应用智能”:AI×机器人或在5年内把人类推向后稀缺经济
【摘要】AI走出软件栈并接管物理世界后,增长、成本、就业、分配与治理都会被改写。
【摘要】AI走出软件栈并接管物理世界后,增长、成本、就业、分配与治理都会被改写。

引言
马斯克把这轮技术变革的“开关”,从大模型的能力跃迁,拨到了一个更硬的方向。AI必须进入物理世界,变成能搬运、能装配、能护理、能巡检的真实劳动力,经济曲线才会从渐进优化转为结构性变速。这个判断和“后稀缺”愿景绑定在一起,逻辑并不复杂。只要劳动供给像服务器一样可复制,单位产出成本持续下探,物质层面的稀缺就会被重新定义。
讨论这件事不能停留在宏观口号。应用智能要落地,离不开机器人硬件、数据闭环、工程可靠性、供能体系、责任合规、以及分配制度的同步演进。技术越接近“通用”,系统越像社会基础设施,单点突破的叙事越不够用。
• 一、从“软件AI”到“应用智能”的分水岭

应用智能不是给企业多配一个聊天机器人,也不是把RPA换成大模型。它更接近一套端到端的生产系统。输入不再只是文本和图像,输出不再只是建议和代码,输出变成动作、产出和服务交付,这一步决定了它对经济结构的影响强度。
1.1 概念边界要清楚
很多争论来自概念混用。软件AI和应用智能的差异,主要在闭环是否穿透到物理世界,是否能在现实约束下持续稳定运行。
1.1.1 软件AI的典型上限
软件AI擅长三类事。第一类是信息处理,例如搜索、生成、摘要、翻译。第二类是决策辅助,例如客服分流、风控初筛、运营策略。第三类是数字化执行,例如在系统内完成工单流转或脚本化操作。它能显著提升白领效率,也能提升部分流程吞吐,但它通常受三种上限约束。
一是价值兑现依赖人类执行,AI的输出需要人去落地。二是受制于组织流程,系统没改造,收益会被摩擦吞掉。三是对物理世界的影响间接,它更多改变信息流,不直接改变物流与能流。
1.1.2 应用智能的关键在闭环
应用智能把闭环补齐。它让AI不仅能“想”,还能“做”,并且在真实世界里形成可迭代的数据回路。这个闭环包含感知、定位、规划、控制、反馈、复盘六段链路。链路越完整,越接近把劳动从“人力”变成“可制造的机器产能”。
应用智能的定义可以收敛成一句话。AI负责把不确定环境中的任务,压缩成可执行动作序列,机器人负责把动作可靠地转化为可计量产出。这也是马斯克把它称为“应用智能体系”的原因,单一模型很难独立承担所有环节。
1.2 一套更贴近落地的参考架构
讨论“AI+机器人”如果只谈模型参数,落地会变成空谈。工程上更有用的视角是分层。分层的目的不是堆名词,而是明确每层的可靠性指标、接口边界、回滚策略与责任主体。
1.2.1 应用智能的分层视图
下表把应用智能拆成常见的六层。每一层都能独立成为瓶颈,整体稳定性由最弱环节决定。
|
层级 |
主要职责 |
常见技术 |
关键指标 |
典型风险 |
|---|---|---|---|---|
|
任务层 |
目标表达与约束 |
任务编排、规则、自然语言到任务图 |
任务成功率、可解释性 |
需求歧义、越权任务 |
|
认知层 |
语义理解与推理 |
VLM、多模态、检索增强、工具调用 |
误判率、幻觉率 |
错误推理触发危险动作 |
|
规划层 |
把任务拆成步骤 |
行为树、层级规划、强化学习策略 |
规划收敛、代价函数稳定 |
长尾场景失控 |
|
控制层 |
运动与力控 |
MPC、PID、阻抗控制、轨迹优化 |
跟踪误差、抖动、碰撞率 |
动力学偏差、结构共振 |
|
感知层 |
识别与定位 |
SLAM、3D重建、目标检测、触觉 |
定位漂移、遮挡鲁棒 |
光照变化、反光材质 |
|
运维层 |
监控与迭代 |
AIOps、数字孪生、OTA、日志回放 |
MTBF、MTTR、升级成功率 |
更新引入回归缺陷 |
表里有两个点决定了它和软件AI的本质差异。第一点是控制层和感知层把系统拉进了物理规律。第二点是运维层把系统拉进了“长期运行”,短演示不等于可规模部署。
1.2.2 从“模型中心”转为“系统中心”
在软件产品里,模型能力通常是第一驱动力。到机器人这里,模型只是一个组件。系统会更像自动驾驶而不是聊天应用,任何一层的不稳定都会把成本打回原形。系统中心的工程方法会更强调灰度、冗余、回退、仿真、场景库,以及对安全边界的硬约束。
1.3 规模化的前提是可复制的能力包
应用智能要改变经济结构,必须跨过“单机智能”这一关,走到“可复制交付”。可复制交付包含三件事。
第一件事是能力包可移植,换场景不等于重写。第二件事是数据闭环可复用,新增场景能持续降低单位学习成本。第三件事是运维体系标准化,能把故障定位和修复变成流水线。这三件事做不到,机器人就会停留在项目制交付,增长曲线很难出现断点。
• 二、增长逻辑变了:劳动力开始像资本品一样扩容
马斯克的激进预测之所以引发关注,不是因为他对GDP数字的判断更准,而是因为他把增长逻辑换了坐标系。传统增长把劳动当作稀缺要素。应用智能把劳动变成可制造物,劳动供给开始具备“产线扩容”的属性。
2.1 机器人把劳动供给从人口约束中释放出来
经济增长长期受人口结构、教育周期、移民政策等因素影响。机器人一旦可规模制造,劳动供给曲线的斜率就会变化。影响增长的核心约束会迁移到更工程化的变量上。
2.1.1 增长上限取决于四个约束
应用智能时代的硬约束更像产业链约束。它主要落在四个维度。
机器人产能决定单位时间能新增多少“劳动力”。部署速度决定这些劳动力能否快速进入生产系统。算力与软件迭代决定机器的技能增长速度。能源与基础设施决定系统能否持续运行并维持低边际成本。这里任何一项短板都可能让“指数叙事”变成线性爬坡。
2.1.2 学习曲线会把优势放大
机器人一旦形成数据闭环,就会出现更强的学习曲线效应。人类技能提升依赖个体训练。机器人技能提升依赖软件分发,边际复制成本更低。当“一个场景的学习”能被“百万台设备共享”,效率差会被放大成结构性优势。这会解释为什么头部厂商在供应链、数据、算力、平台化能力上的投入,会转化为更持久的规模壁垒。
2.2 成本结构的重排比增长数字更重要
“后稀缺”谈的是成本结构。成本结构一变,价格体系、企业组织、社会分配都会跟着变。马斯克提出的人力成本占比高达60%以上,然后逐步下探到接近电力等边际费用,这个说法偏概括,但方向成立。制造业、物流、零售、餐饮、护理等行业的人力占比确实很高,替代空间也确实最大。
2.2.1 从工资到电力与维护
把人换成机器人后,成本不会消失,而是迁移。它会从工资、社保、招聘、培训、离职损耗,迁移到电力、折旧、备件、维修、软件订阅、网络与算力。真正决定边际成本能否接近零的,是MTBF、停机率、备件周转、以及升级是否稳定。如果运维做不好,表面上省掉了工资,实际上会被停机、召回和事故成本吞噬。
2.2.2 用TCO拆开看会更接近现实
很多企业评估机器人喜欢用单机售价对比人工工资,这个口径容易误判。更有效的是TCO。下表给出一个更通用的拆解方式,便于把讨论从情绪拉回到算账。
|
成本项 |
人工时代的表现 |
机器人时代的表现 |
评估抓手 |
|---|---|---|---|
|
固定成本 |
招聘培训周期长 |
设备采购与部署 |
规模折扣、交付周期 |
|
可变成本 |
工时与加班 |
电价、充电、耗材 |
单位任务能耗 |
|
风险成本 |
工伤与合规 |
事故责任与召回 |
安全设计与保险 |
|
质量成本 |
人为波动 |
传感误差与漂移 |
质检闭环与校准 |
|
灵活性成本 |
排班与流动 |
场景适配与改造 |
平台化与模块化 |
当企业用TCO衡量,才会发现“后稀缺”并不来自机器人更便宜,而来自机器人系统稳定后带来的两件事。第一件事是吞吐变大,固定成本被摊薄。第二件事是质量更一致,返工和投诉下降。这两件事叠加,才会推动价格长期下行。
2.3 GDP与福利可能出现脱钩
当商品与服务成本持续下降,GDP未必能同步反映生活福利。GDP统计依赖货币价值。边际成本下探会压低名义价格。供给极大丰富也会让部分服务变成“接近免费”的公共品形态。在这种结构下,福利提升可能快于GDP增长,GDP也可能因为价格因素低估真实产能。这一点会影响政策沟通与社会预期,因为公众感受到的“更便宜更好用”,未必会体现在宏观数字上。
• 三、落地的硬骨头在工程化,不在模型参数
应用智能落地失败的常见原因,不是模型不够大,而是系统工程不够硬。机器人系统面对的是长尾、摩擦、老化、污染、遮挡、网络抖动、零部件批次差异。模型能力越强,越需要工程边界来兜住风险。
3.1 可靠性来自流程,不来自灵光一现
机器人演示视频通常是在可控环境里完成。规模化运行时,真正的敌人是长时间的稳定性。可靠性不是口号,它是流程结果。
3.1.1 长尾场景需要“可退化”的策略
在真实世界里,任务失败不是异常,而是常态之一。系统必须设计退化路径,例如降级为远程接管、降级为安全停机、降级为局部可行的子任务。能退化的系统才敢上线,不能退化的系统只能在实验室里成功。这也是为什么很多团队会把行为树和规则边界重新请回来,它们不是落后,而是兜底机制。
3.1.2 安全要从功能外置变成系统内生
把安全做成外部审核,很难跟上迭代速度。更可行的是把安全变成系统内生机制。常见做法包括动作空间约束、速度与力的硬限、危险区域地理围栏、双通道安全控制器、以及关键动作的多模态一致性校验。
安全还必须覆盖对抗输入与滥用。应用智能连上工具链后,攻击面会从模型提示扩展到传感器欺骗、视觉贴纸、无线干扰、OTA投毒、数据回放污染。安全模型需要和运维模型一起设计,否则事故会直接变成社会议题。
3.2 供应链与制造决定扩张速度
把劳动变成可复制的资本品,前提是你真的能造出来。机器人产业链里,很多部件不是“能买到”,而是“能稳定批量买到并且一致性可控”。
3.2.1 关键部件决定成本与良率
人形机器人或通用移动操作机器人,常见瓶颈集中在执行器与传动。电机、减速器、丝杠、驱动器、力矩传感器、IMU、深度相机、以及电池系统会决定成本、重量、续航与稳定性。部件一致性不够,会直接把控制算法逼到极限,最终以高返修率的形式爆雷。
这也是为什么“机器人像手机一样普及”的叙事里,真正的挑战不在软件分发,而在硬件良率、产线自动化、供应商质量体系与测试标准。
3.2.2 制造业的自动化会反向加速机器人普及
一个很现实的正反馈是,机器人越多,产线越自动化,机器人自身也越容易被制造出来。应用智能一旦进入工厂,会先改变“造机器的工厂”,再改变“用机器的行业”。这个链路更像产业升级而不是单点产品爆发。
3.3 运维体系是规模化的门票
规模化部署之后,最贵的环节往往不是采购,而是运维。硬件在外场跑一年,会遇到磨损、灰尘、跌落、液体、温差、电磁干扰。没有运维体系,成本会快速失控。
3.3.1 OTA与灰度升级必须像车规一样严谨
机器人需要持续学习与升级,但每次升级都可能引入回归缺陷。可行的做法是分层升级与分群灰度。底层控制与安全模块要更保守,上层策略可以更激进。升级策略要配套可回滚、可复现、可追责。
这类流程在自动驾驶里已经踩过坑。应用智能的工程团队可以少走弯路,但前提是组织愿意为质量体系投入,而不是只追求演示速度。
3.3.2 观测性决定定位效率
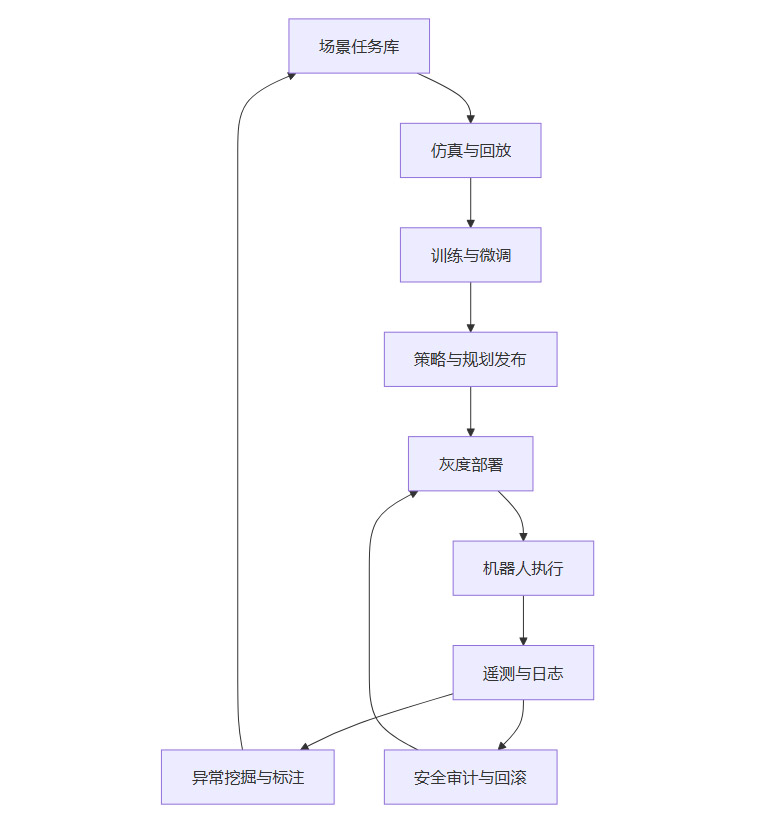
外场问题不怕发生,怕的是定位不了。机器人需要更强的观测性,包括时序日志、关键传感器快照、动作指令链路追踪、异常片段的自动回传、以及仿真回放环境。观测性做不好,团队会被线上问题拖垮,迭代速度反而下降。
下面这张流程图给出一个更工程化的数据闭环,重点是把“上线运行”纳入训练与验证体系,而不是把训练当作一次性项目。
• 四、后稀缺能否成立,取决于分配与治理是否跟得上

生产力上去并不自动等于普惠。应用智能把“生产”变得更容易,也可能把“占有”变得更集中。机器人、算力、数据、能源都具备强规模效应,所有权结构如果过于集中,社会看到的可能是“极高效率”和“高不平等”同时出现。
4.1 所有权结构决定红利流向
当劳动由机器提供,谁拥有机器就更关键。企业拥有机器会带来利润集中。平台拥有数据与模型会带来议价权集中。能源与算力被少数主体掌控,会让边际成本难以下探到社会层面的“接近零”。
后稀缺不是单纯的产能问题,它是产能与分配机制的乘积。分配机制包括税收、转移支付、公共服务、最低保障、教育再培训,也包括让更多主体能参与资本化收益的制度设计。
4.2 合规与责任链条必须前置
机器人进入公共空间后,事故责任不能靠公关解决。责任链条需要更明确的划分。硬件缺陷、软件缺陷、模型误判、第三方插件、现场改装、运维失误,都要有可审计证据。
监管也会推动标准化,包括功能安全、网络安全、隐私保护、数据出境、以及关键行业准入。合规不是刹车,它更像道路标线,标线清晰,规模化才有可能加速。
结论
马斯克把赌注压在“应用智能”,本质是押注一个更硬的现实。当AI与机器人合体并进入生产系统,劳动会像资本品一样被制造与扩容,成本结构会从工资迁移到能耗与运维,宏观指标、就业结构、分配机制都会被迫改写。
后稀缺是否会在五年内出现,不取决于口号强度,而取决于工程化是否把系统变成基础设施,取决于能源与供应链是否能支撑扩张,也取决于分配与治理是否能把效率红利变成社会层面的福利。
📢💻 【省心锐评】
应用智能最难的不是“更聪明”,而是“更稳定更可控”,红利能否普惠取决于分配与治理。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 8
8 0
0- 0


 已为社区贡献555条内容
已为社区贡献555条内容

所有评论(0)