空气屏操作实现原理深度解读:无触控交互的科技魔法
摘要: 空气屏技术(AirTouch)通过非接触式交互实现“隔空操作”,融合光学、算法与人因工程,主要采用深度相机、毫米波雷达和超声波/ToF三种技术方案。深度相机支持复杂手势但受光线限制,毫米波雷达适应性强但开发门槛高,超声波方案成本低但精度不足。当前挑战包括缺乏触觉反馈、操作疲劳、误触及标准化缺失。未来趋势是多模态融合与AI增强,结合视觉、雷达及上下文感知,实现更自然的“意图交互”。空气屏并非
“隔空点按”“挥手翻页”“凌空写字”——这些曾只存在于科幻电影中的场景,如今正通过“空气屏”(Air Touch / Touchless Interaction)技术走进现实。从车载系统到智能家居,从医疗手术室到工业控制,无需接触屏幕即可完成精准操作的交互方式,正在重塑人机关系。本文将深入剖析空气屏操作的核心实现原理,揭开其背后融合光学、算法与人因工程的科技密码。

一、什么是空气屏操作?
空气屏操作(也称“无触摸交互”“空中手势控制”)是指用户在不接触任何物理表面的情况下,通过手部、手指或身体在空中的动作,对电子设备进行输入与控制的技术。其核心目标是:
-
消除物理接触(卫生、防误触、特殊环境需求);
-
提供更自然、沉浸式的交互体验;
-
扩展传统触控的交互维度(如 Z 轴深度、动态轨迹)。
⚠️ 注意区分:
- 空气屏 ≠ 全息投影
(后者是显示技术,前者是交互技术);
- 空气屏 ≠ 简单红外感应
(如自动水龙头,仅检测有无,无法识别手势)。
二、核心技术路线:三大主流实现方案
目前,空气屏操作主要通过以下三类技术路径实现,各有优劣:
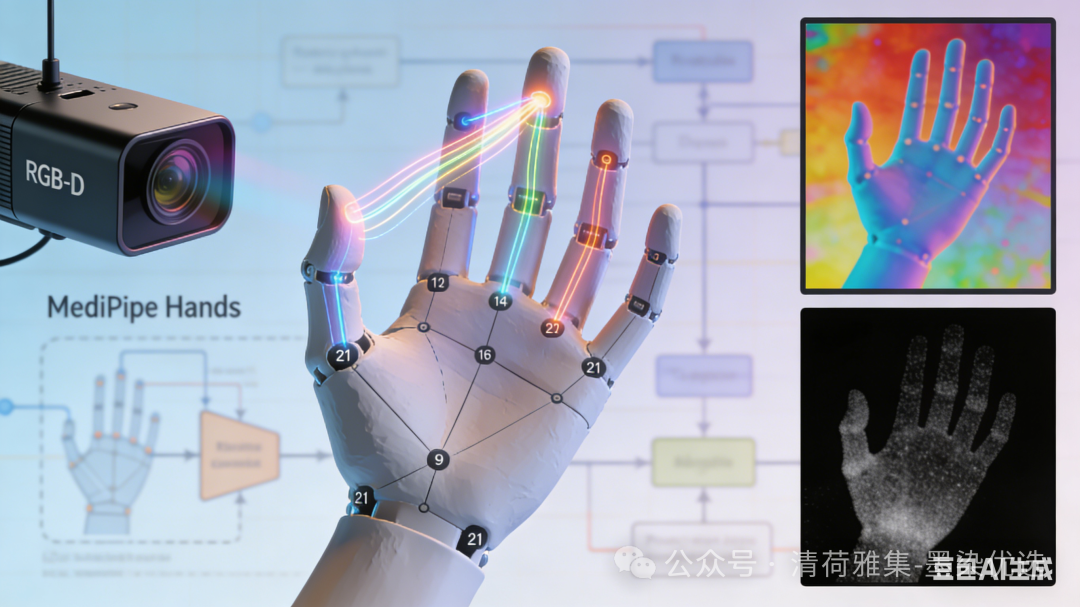
1. 基于深度相机的视觉方案(主流)
原理:
利用 RGB-D 深度相机(如 Intel RealSense、Microsoft Kinect、Orbbec)同时获取彩色图像(RGB)和深度图(Depth),通过计算机视觉算法实时重建手部三维模型,追踪指尖位置与手势姿态。
关键技术栈:
- 手部关键点检测
:使用深度学习模型(如 MediaPipe Hands、OpenPose)识别21个手部关节3D坐标;
- 手势识别
:将关键点序列输入 LSTM 或 Transformer,分类为“点击”“滑动”“握拳”等语义手势;
- 交互映射
:将空中坐标系映射到屏幕坐标系(需标定)。
优势:
-
支持复杂手势(如捏合、旋转);
-
可识别多指、双手操作;
-
成本逐渐降低(消费级深度相机 <$100)。
局限:
-
受强光、反光干扰;
-
隐私顾虑(采集图像);
-
功耗较高,难用于移动设备。
✅ 典型应用:宝马 iDrive 8 空中手势控制、手术室无菌操作终端。
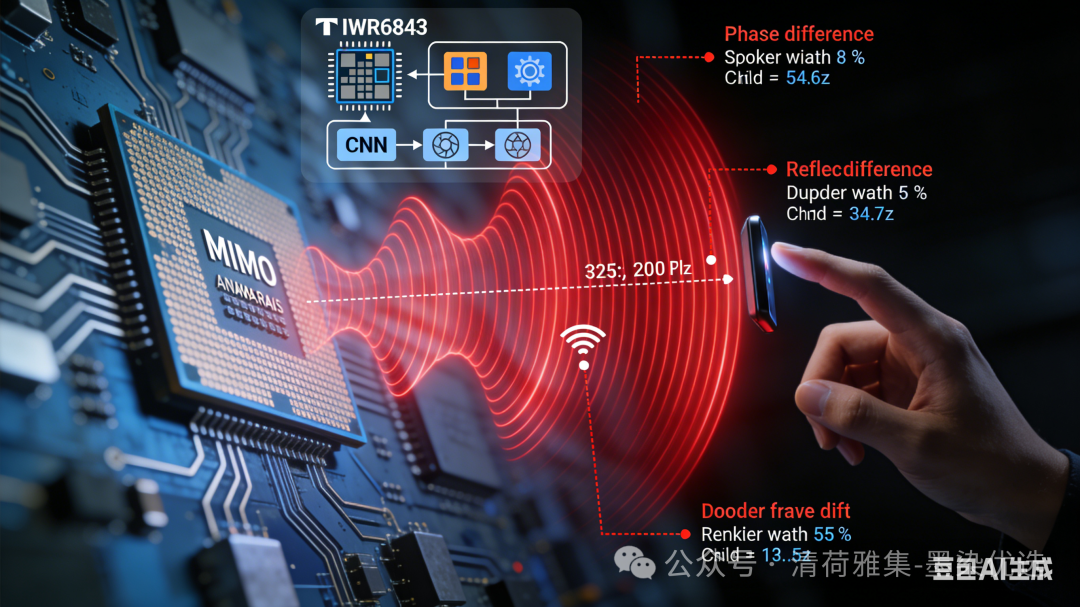
2. 基于毫米波雷达(mmWave Radar)的射频方案
原理:
发射 60–80 GHz 毫米波信号,通过接收反射波的相位差、多普勒频移、飞行时间(ToF),计算出手部微动(毫米级精度)与速度,进而识别手势。
关键技术:
- FMCW(调频连续波)雷达
:测量距离与速度;
- MIMO 天线阵列
:提升角度分辨率;
- AI 信号处理
:将雷达点云转化为手势指令(如 TI IWR6843 + CNN)。
优势:
-
不受光线影响(黑夜/强光均可工作);
-
隐私友好(不采集图像,仅点云数据);
-
低功耗、小体积(芯片级集成);
-
可穿透非金属材料(如嵌入仪表盘)。
局限:
-
手势复杂度有限(适合简单指令:左/右/上/下/点击);
-
对快速动作易丢失;
-
开发门槛高(需射频+算法 expertise)。
✅ 典型应用:Google Pixel 4 Motion Sense、华为智能座舱隔空切歌、智能家居开关。
3. 基于超声波/ToF 传感器的近距离方案
原理:
- 超声波
:发射超声脉冲,通过回波时间计算距离(类似蝙蝠);
- 光学 ToF
:发射红外光,测量光飞行时间得深度。
通常部署多个传感器形成“感应场”,当手进入区域时,通过三角定位确定位置。
特点:
-
成本极低(< $5);
-
功耗低;
-
适合短距离(< 30 cm)、简单交互(如 hover、接近唤醒)。
局限:
-
精度低、易受环境噪声干扰;
-
无法识别复杂手势;
-
视场角窄。
✅ 典型应用:手机 proximity sensor(通话灭屏)、智能手表抬腕亮屏。
三、核心挑战:从“能用”到“好用”的鸿沟
即使技术可行,空气屏要替代触控仍面临四大难题:
1. 戈勒姆效应(Golem Effect)——缺乏触觉反馈
用户无法感知“是否点击成功”,导致操作焦虑与重复动作。
解决方案:
-
视觉反馈:高亮按钮、动画确认;
-
听觉反馈:点击音效;
-
微震动(若设备支持)。
2. 疲劳问题(Gorilla Arm)
长时间抬手操作导致肌肉酸痛。
对策:
-
限定交互区域(如仅需小幅移动);
-
支持语音+手势混合交互;
-
自动休眠(无操作 2 秒后退出)。
3. 误触发与精度平衡
过于灵敏 → 误触;过于迟钝 → 体验卡顿。
优化方向:
-
引入手势置信度阈值;
-
使用动态时间规整(DTW) 匹配手势模板;
-
结合上下文(如当前界面元素)过滤无效手势。
4. 标准化缺失
各厂商手势定义不一(如“握拳”在 A 品牌是返回,B 品牌是静音),用户需重新学习。
行业趋势:IEEE 正推动《无接触交互手势标准》制定。
四、未来演进:多模态融合与 AI 增强
单一技术难以满足全场景需求,多传感器融合 + 大模型理解是未来方向:
- 视觉 + 雷达融合
:深度相机提供手势细节,毫米波提供鲁棒性;
- AI 上下文感知
:结合用户习惯、环境状态(如驾驶中 vs 家中)动态调整交互逻辑;
- 神经辐射场(NeRF)重建
:实现厘米级精度的全身姿态估计,支持全身交互。
🌐 终极愿景:“意图交互” ——系统理解用户意图,无需固定手势。例如,用户看向空调并皱眉,系统自动调高温度。

结语:交互的终极目标是“无形”
空气屏操作并非要取代触控,而是在特定场景下提供更优解:无菌环境、湿手操作、远距离控制、沉浸式体验。其真正价值不在于“隔空点按”的炫技,而在于消除人与数字世界之间的物理摩擦。
随着传感器微型化、AI 算法轻量化、人因研究深入,空气屏将从“新奇功能”变为“隐形基础设施”。未来的理想交互,或许正如《Minority Report》所预言:你看向它,它就懂你——无需触摸,亦无延迟。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 27
27 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)