自动驾驶中的传感器技术85——Sensor Fusion(8)
摘要:PVT(位置、速度、时间)是GNSS系统的最终输出结果,通过与IMU数据进行松耦合或紧耦合融合实现精准定位。松耦合PVT融合采用EKF算法,工程实现简单但抗干扰能力较弱;紧耦合直接处理原始GNSS观测数据,在信号遮挡时仍能保持定位。多传感器融合(GNSS+IMU+视觉/激光雷达)和高精度算法(RTK/PPP)可提升定位精度至厘米级,满足自动驾驶需求。发展趋势包括多频多星座融合、AI驱动的异常
现在是PVT
这里的 PVT 指的是全球卫星导航系统(GNSS)直接输出的最终解算结果:
-
P (Position): 位置(经度、纬度、海拔)
-
V (Velocity): 速度(北向速度、东向速度、天向速度)
-
T (Time): 时间(UTC 时间、接收机钟差)
PVT 融合的核心逻辑是:将 GNSS 芯片已经算好的“位置和速度”,与 IMU(惯性测量单元)的“加速度和角速度”进行融合。
1. 单传感器 GNSS 基础定位算法
|
算法 |
关键原理 |
适用场景 |
备注 |
|---|---|---|---|
|
伪距定位 |
通过测量卫星到接收机的传播时间(伪距)求解三维坐标。 |
开阔环境、对精度要求不高(≈1 m) |
受多路径、离子层、对流层误差影响大。 |
|
载波相位定位 |
利用载波相位的相对测量,可实现亚米甚至厘米级精度。 |
高精度需求的定位(RTK、PPP) |
需要整数模糊度解算,计算复杂。 |
|
PPP(Precise Point Positioning) |
采用精密星历、模型校正,单站即可实现厘米级定位。 |
全球范围、无基准站的高精度定位 |
对卫星可见性要求高,收敛时间相对较长。 |
|
RTK(Real‑Time Kinematic) |
基站提供差分观测,快速消除共模误差,实现厘米级定位。 |
城市道路、车道保持、自动泊车等 |
需要基站或网络RTK服务,基站遮挡时性能下降。 |
这些算法是车载 GNSS 感知的“底层”。在实际系统中往往与后续的多传感器融合一起使用,以提升鲁棒性。
2. 多传感器融合(GNSS + IMU + 其他)
2.1 融合模式
|
融合方式 |
说明 |
常用实现 |
|---|---|---|
|
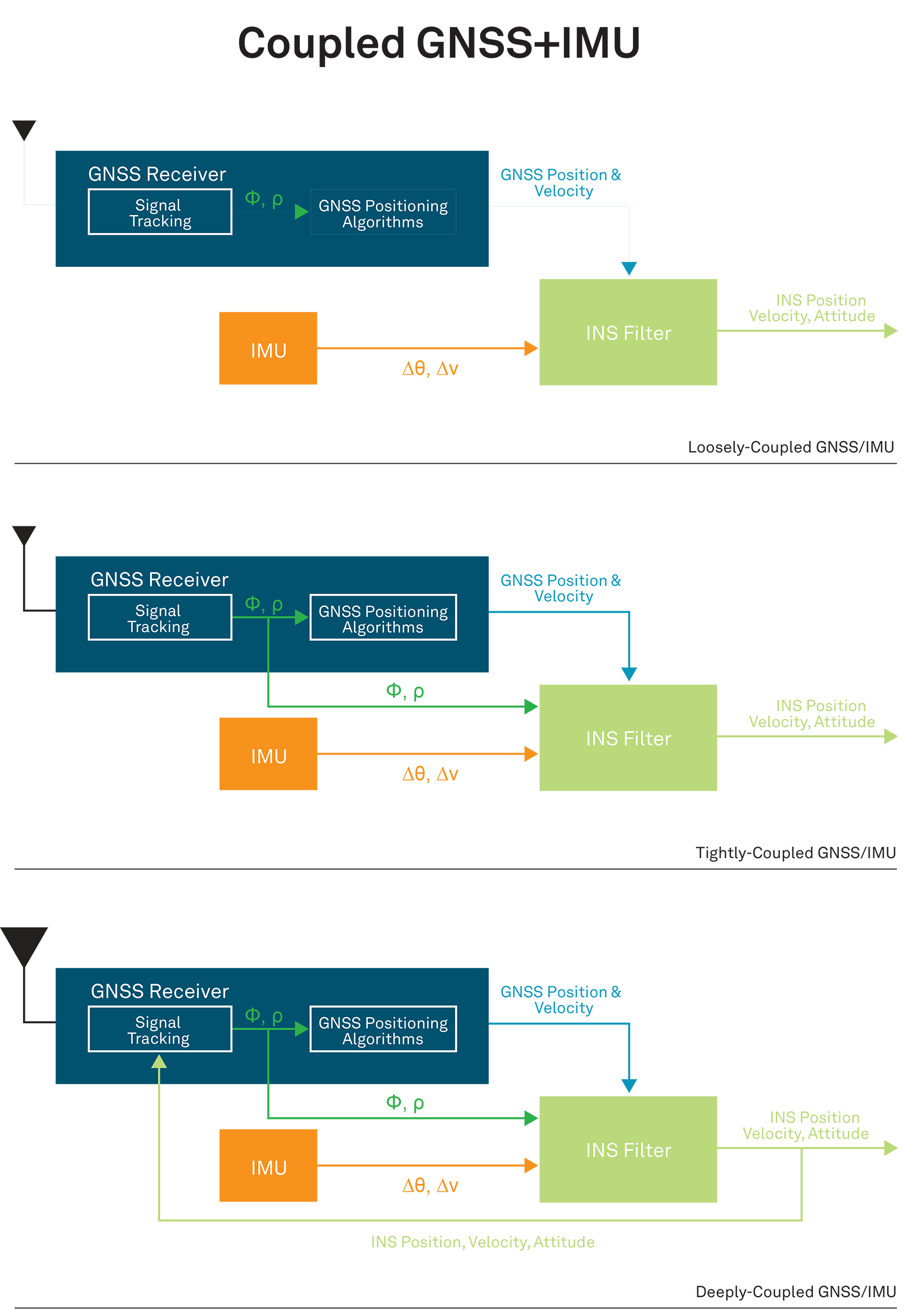
松耦合(Loose Coupling) |
GNSS 先独立解算出位置/速度,再与 IMU 进行卡尔曼滤波融合。 |
适用于 GNSS 信号较好、对实时性要求不高的场景。 |
|
紧耦合(Tight Coupling) |
将原始 GNSS 伪距、载波相位直接与 IMU 观测一起进入滤波器。 |
在 GNSS 信号遮挡或弱视情况下仍能保持定位()。 |
|
深耦合(Deep Coupling) |
GNSS 基带处理(如相位解算)与 IMU 融合在同一芯片内部完成,误差模型更紧密。 |
适用于高端车规级芯片,提升抗干扰能力。 |
2.2 常用滤波框架
-
扩展卡尔曼滤波(EKF)
-
通过线性化雅可比矩阵实现非线性系统状态估计。
-
在车载 GNSS/IMU 融合中最为常见,能够实时提供位置、速度、姿态。。
-
无迹卡尔曼滤波(UKF)
-
通过 sigma 点传播避免显式求雅可比,适用于高度非线性场景。
-
粒子滤波(PF)
-
采用蒙特卡罗采样处理多模态分布,尤其在 GNSS 信号出现大尺度遮挡时表现更稳健。
-
因子图优化(FGO)
-
将 GNSS、IMU、里程计等观测构建为因子图,使用非线性最小二乘求解,可实现全局一致性和后端优化。
2.3 鲁棒 EKF 及自适应技术
-
抗差 EKF(Robust EKF):在观测残差中加入 Huber、M‑估计等抗差函数,抑制多路径、粗差的影响。。
-
自适应 EKF(Adaptive EKF):根据残差统计动态调节过程噪声 Q 与观测噪声 R,提升在卫星数量不足或几何分布差的环境下的稳定性。。
-
双窗口 Sage‑Husa 抗差 EKF:进一步结合双窗口残差评估,实现更强的异常检测与切换。。
这些鲁棒/自适应方案在城市峡谷、隧道等 GNSS 信号受阻的车载场景中被广泛验证,可将定位误差从分米级压缩至厘米级。
3. 多系统 GNSS 融合(GPS + BDS + Galileo + GLONASS)
-
通过统一的时间、坐标框架,将四大系统的观测一起输入 EKF,实现更高的可见卫星数和几何强度。。
-
在中长基线(>10 km)情况下,结合 EKF 对大气误差进行实时估计,可显著提升 RTK 固定率并缩短收敛时间
4. 环境感知与 NLOS / 多路径抑制
-
机器学习/深度学习检测:利用卷积神经网络或图神经网络对 GNSS 原始观测的信噪比、伪距残差等特征进行分类,自动标记 NLOS(非视线)观测并剔除。
-
多频、多星座协同:不同频段的观测在多路径特性上存在差异,融合后可通过差分方法抑制多路径误差。
虽然上述技术在学术论文中已有初步验证(如 2023‑2024 年的多模态感知研究),在车载产品中正逐步落地。
5. 与高精度地图、SLAM 的闭环感知
-
地图匹配(Map‑Matching):将 GNSS 轨迹投影到高精度道路网络或车道中心线,实现位置纠偏。。
-
视觉/激光 SLAM 融合:在 GNSS 完全失效的隧道或地下场景,使用视觉里程计或激光雷达构建局部地图,并通过因子图与 GNSS/IMU 融合实现“相对定位 + 绝对校正”。。
这种感知闭环在 L4/L5 自动驾驶系统中是实现全场景定位的关键。
6. 在智能驾驶系统中的定位角色
车载 GNSS 感知是智能驾驶感知层的基石,直接支撑以下功能:
-
车道保持与路径规划:提供全局坐标基准,配合高精度地图实现车道级定位。。
-
V2X(车路协同)定位:通过 C‑V2X 与 GNSS 融合,实现车间相对定位与协同决策。。
-
冗余安全定位:在多传感器融合框架下,GNSS 与 IMU、雷达、摄像头形成冗余链路,满足功能安全(ASIL D)要求。。
7. 典型算法实现流程(示例)
-
原始数据预处理
-
GNSS:伪距、载波相位、卫星状态(SNR、Eph)过滤。
-
IMU:零偏校准、噪声模型(Allan 方差)估计。
-
状态模型建立
-
车辆动力学(六自由度)+ IMU 误差状态。
-
观测模型构建
-
紧耦合 GNSS 伪距/相位 → 观测方程。
-
IMU 加速度、角速度 → 预测方程。
-
滤波/优化
-
EKF(或鲁棒 EKF)进行递推预测‑更新。
-
若需要全局一致性,可在后端使用因子图优化(FGO)进行滑动窗口平滑。
-
异常检测与剔除
-
基于残差的 χ² 检验、Huber 损失或机器学习分类。
-
输出融合定位
-
位置(经纬度/ENU)、速度、姿态、置信度。
-
同时输出 GNSS 质量指示(PDOP、卫星数)供上层决策使用。
8. 发展趋势与挑战
|
趋势 |
说明 |
|---|---|
|
多频、多星座、全局导航 |
5G/6G 与 GNSS 网络协同,提供更高的可用性。 |
|
因子图与图优化的实时化 |
结合 GPU/FPGA 加速,实现毫秒级全局优化。 |
|
深度学习驱动的 NLOS 检测 |
端侧模型轻量化,实时剔除异常观测。 |
|
车路协同定位(V2X‑GNSS 融合) |
利用路侧基站、RSU 提供短时差分或伪距校正。 |
|
安全可靠性验证 |
通过仿真+实车闭环测试,满足 ISO 26262 / 功能安全等级。 |
结语 车载 GNSS 感知算法已经从单一的伪距定位演进为多传感器、鲁棒、实时优化的综合体系。核心技术包括 RTK/PPP 高精度解算、紧耦合 GNSS‑IMU 融合(EKF、UKF、PF、因子图)、抗差/自适应滤波以及与高精度地图/SLAM 的闭环结合。随着多频多星座 GNSS、车路协同和 AI 驱动的异常检测进一步成熟,车载 GNSS 感知将在 L4/L5 自动驾驶的全场景定位中发挥决定性作用。
1. 基础原理与数据模型
-
传感器组成:三轴加速度计 + 三轴陀螺仪(部分型号还包括三轴磁力计),提供线性加速度、角速度(以及磁场)信息。
-
姿态表示:常用四元数、方向余弦矩阵(DCM)或欧拉角(Yaw‑Pitch‑Roll)来描述车辆姿态,避免奇异点并便于数值积分。
-
误差模型:IMU 零偏、比例因子、噪声等误差通常采用一阶高斯马尔可夫(Gauss‑Markov)模型描述,便于在滤波器中进行状态预测。
2. 单体惯性导航(INS)算法
|
步骤 |
说明 |
|---|---|
|
时间更新(预测) |
根据 IMU 的加速度和角速度,利用刚体动力学方程对位置、速度、姿态进行积分(惯性导航机械化)。 |
|
误差状态传播 |
将误差模型(零偏、比例因子)加入状态向量,使用线性化的误差动力学方程进行传播。 |
|
姿态更新 |
采用四元数或 DCM 的递推公式,保持数值稳定性。 |
|
漂移校正 |
纯惯性导航在数十秒后会出现显著漂移,需要外部约束(如 GNSS、车轮里程计)进行校正。 |
3. 传感器融合框架
3.1 扩展卡尔曼滤波(EKF)
-
核心思路:将 IMU 误差状态与外部观测(GNSS 伪距、速度、车轮里程计)放入同一状态向量,利用 EKF 的线性化预测‑更新步骤实现紧耦合融合。
-
常见约束:
-
零速度更新(ZUPT):车辆停稳时强制速度为零,抑制漂移。
-
非完整约束(Non‑holonomic):车辆侧向和垂直速度近似为零,提升横向定位精度。
-
零积分航向率(ZIHR):在直线行驶段约束航向变化率。
3.2 无迹卡尔曼滤波(UKF)
-
对高度非线性系统(如四元数姿态)提供更精确的统计线性化,适用于高动态驾驶场景。
3.3 粒子滤波(PF)
-
在多模态误差分布或 GNSS 完全失效(隧道)时,可通过大量粒子保持姿态/位置的概率分布,提升鲁棒性。
3.4 互补滤波(Complementary Filter)
-
轻量级实现,利用低频 GNSS/里程计信息校正高频 IMU 积分误差,常用于嵌入式平台。
4. 紧耦合 GNSS‑IMU 融合(车载定位)
-
紧耦合结构:在滤波器内部直接使用原始 GNSS 伪距、伪距速率(Doppler)以及时间差分载波相位(TDCP)作为观测,结合 IMU 状态进行联合估计。
-
优势:
-
在 GNSS 信号遮挡(城市峡谷、隧道)期间仍能保持连续定位,误差在 5‑6 m 量级。
-
通过 TDCP 计算航向角,可在无 GNSS 时提供可靠的航向约束。
-
实现要点:
-
状态向量 包含位置、速度、姿态误差、IMU 零偏、比例因子、GNSS 时钟误差。
-
观测方程 对伪距、Doppler、TDCP 进行线性化,加入噪声模型(SNR‑dependent)。
-
滤波步骤:初始化 → 时间更新 → 多源观测更新(GNSS、ZUPT、非完整约束) → 重置/再初始化。
5. 多传感器融合的高级应用
|
融合方案 |
关键算法 |
适用场景 |
|---|---|---|
|
视觉‑惯性里程计(VIO) |
EKF‑VIO、MSCKF、OpenVINS |
高精度定位、SLAM、低速城市道路 |
|
激光雷达‑惯性融合(LIO) |
LIO‑SAM、FAST‑LIO |
高速公路、复杂城市环境、夜间/雨雾 |
|
车轮里程计‑IMU 融合 |
卡尔曼滤波 + 轮速约束 |
低速泊车、短时 GNSS 失效 |
|
深度学习校正 |
RNN/LSTM 对 IMU 零偏进行预测、端到端姿态估计 |
高动态运动、传感器退化检测 |
近年来,随着 高精度 MEMS 与 AI‑驱动的自适应滤波 技术成熟,车载 IMU 感知正向 端到端学习‑融合 方向发展,能够在极端噪声环境下自动调节滤波参数,实现更稳健的定位与姿态估计。
6. 实际工程实现要点
-
标定:在出厂前完成加速度计、陀螺仪的温度补偿与轴间对准;现场可通过静态/动态标定进一步降低零偏漂移。
-
计算平台:实时 EKF/UKF 计算量约 10‑20 µs(单核 DSP),适合车规级 MCU;深度学习模型需在车载 GPU/AI 加速器上运行。
-
容错设计:在 GNSS 完全失效时切换至 纯惯性死算(Dead‑reckoning)或 VIO/LIO;使用 冗余 IMU(双 IMU)提升可靠性。
-
软件架构:推荐采用 ROS 2 或 AUTOSAR Adaptive 中间件,实现模块化的传感器数据流、滤波器节点与状态发布。
1. 核心架构:松耦合 (Loose Coupling)
PVT 融合处于组合导航融合层级中的最上层(也是最简单的一层)。
-
输入 A: GNSS 接收机输出的 PVT 结果。
-
注意:这里不涉及卫星的伪距或载波相位,只用芯片吐出来的最终经纬度。
-
输入 B: IMU 输出的原始数据(比力/加速度 + 角速度)。
-
融合算法: 扩展卡尔曼滤波 (EKF)。
-
预测步骤 (Time Update): 利用 IMU 的高频数据进行积分(航位推算),预测下一时刻的位置和速度。
-
更新步骤 (Measurement Update): 当 GNSS 的 PVT 数据到来时(通常 1Hz - 10Hz),将其作为“观测值”,计算观测残差(Measurement Residual),用来修正 IMU 的推算误差,并估计 IMU 的零偏(Bias)。
2. PVT 融合的优缺点
相比于之前提到的“Raw Data 级融合(紧耦合)”,PVT 融合有非常鲜明的特点:
优点:
-
工程实现简单 (Easy Integration):
-
GNSS 模块是一个独立的“黑盒”。你只需要解析标准的 NMEA 协议(如 $GNGGA, $GNRMC)拿到经纬度即可,不需要懂卫星信号处理算法。
-
模块化强 (Modular):
-
你可以随意更换 GNSS 接收机的品牌(如从 u-blox 换到 和芯星通),只要它们都输出 PVT,后端的融合算法几乎不用改。
-
算力消耗小:
-
卡尔曼滤波的状态量较少,对车载 MCU 压力很小。
缺点:
-
抗干扰能力弱 (Less Robust):
-
级联失效问题: GNSS 芯片内部需要至少 4 颗卫星 才能解算出 PVT。如果进入城市峡谷,只能看到 3 颗卫星,GNSS 芯片就会停止输出 PVT(或输出无效值)。此时,整个融合系统就失去了校正源,只能靠 IMU 硬抗(并在几秒后飘飞)。
-
对比:紧耦合(Raw Data 融合)即使只有 2 颗卫星,也能利用这 2 颗卫星的伪距来约束 IMU,不会彻底失效。
-
无法处理多路径效应 (Multipath):
-
在玻璃幕墙附近,GNSS 算出的 PVT 可能会因为信号反射产生几十米的跳变。因为是“松耦合”,融合算法很难判断这个跳变是真是假,容易被带偏。
-
不可逆的精度损失:
-
GNSS 芯片内部解算 PVT 时已经使用了一次卡尔曼滤波,这引入了过程噪声相关性。再在外部做一次融合,理论上不符合卡尔曼滤波关于噪声独立性的假设(Incestuous Data Problem),限制了最终精度的上限。
3. 应用场景
-
车载导航/车机 (IVI): 绝大多数普通的车载导航都使用 PVT 融合。当车辆进入隧道丢失 GPS 时,利用车速脉冲和简易 IMU 维持几分钟的图标移动。
-
低速/低成本机器人: 扫地机、割草机等。
-
入门级 ADAS (L2): 对于车道级定位要求不高的功能,PVT 融合配合高精地图匹配(Map Matching)通常够用。
4. 总结:PVT 融合 vs. SPP/RTK
在实际应用中,PVT 融合中的 "PVT" 来源有两种精度级别:
-
SPP-PVT 融合 (单点定位):
-
普通 GPS 模块,精度 3-5 米。融合 IMU 主要是为了平滑轨迹,填补 1Hz GPS 之间的空隙,让导航光标看起来顺滑。
-
RTK-PVT 融合 (高精度):
-
GNSS 模块内部集成了 RTK 引擎,直接输出厘米级的 PVT。
-
融合算法利用 IMU 主要是为了解决**短时遮挡(如过桥下、树荫)**时的定位连续性问题。
一句话概括:PVT 融合就是把 GNSS 当作一个位置传感器,用它的读数来校准 IMU 的积分漂移,是目前最通用的低成本组合导航方案。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 12
12 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)