PX4常用参数设置-调参进阶
在PX4开源飞控使用过程中,网上有很多关于PX4的基本调参资料,但是很少有详细介绍除开PX4基本调参之外的参数设置,这些设置包含:日志记录设置、解锁设置、飞行速度/加速度设置、姿态角度设置等等;接下来我详细介绍下在PX4使用过程中经常会用到的一些参数设置,由于PX4相关参数太多,部分用不上的参数就不在这里讲解了。
一、基础调参
这里我就不详细介绍关于机架选择、遥控器校准、模式选择、执行输出、电池、传感器校准、安全等基本调参了,大家有基本调参的问题可以找之前我写的文章:《PX4基础调参操作-详细介绍》:

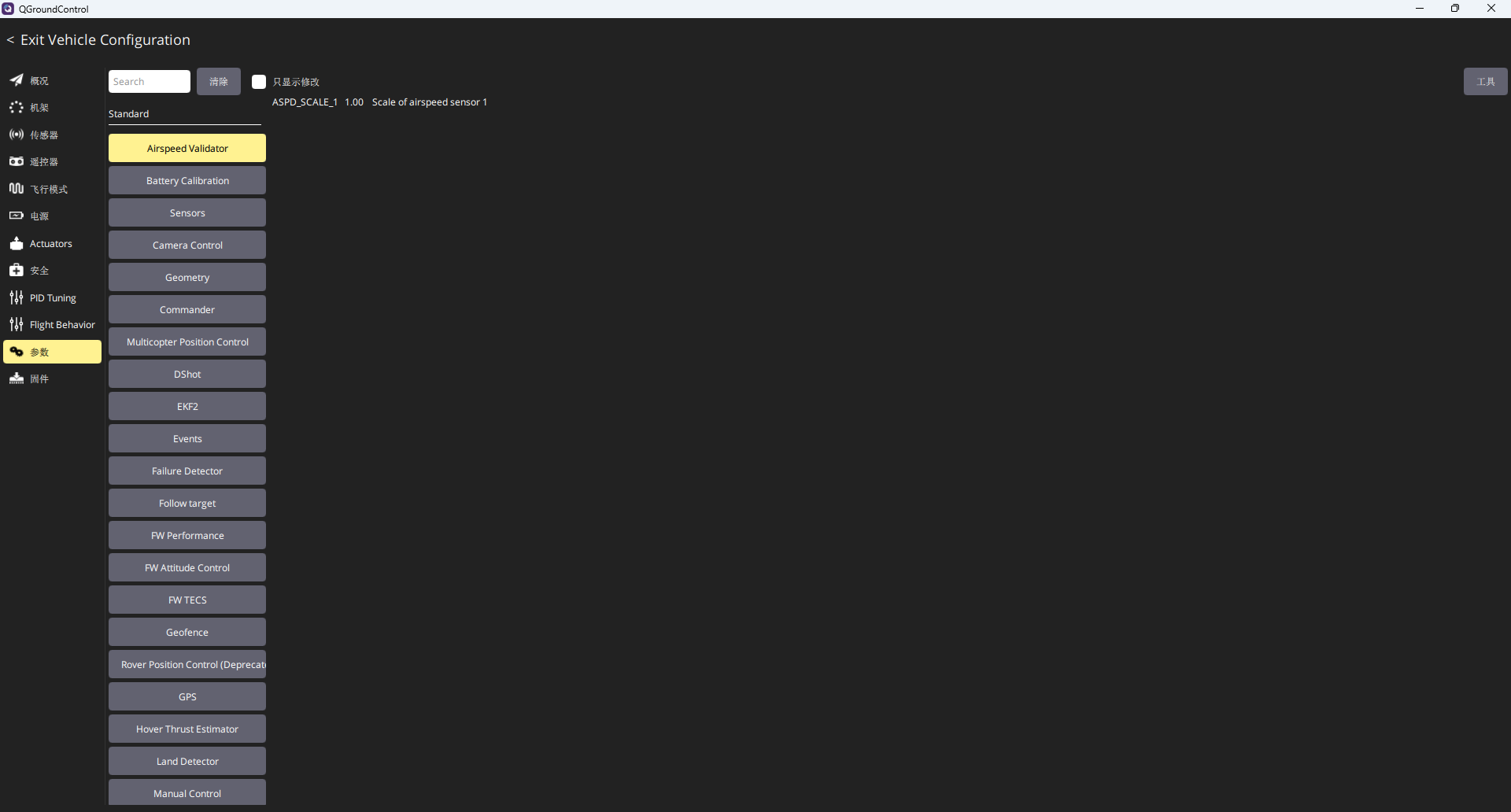
二、参数设置入口
参数设置的入口在整个基础调参功能的最下方,有一个名为“参数”功能,选择后会列出所有参数类型,可寻找需要设置的参数类型里的具体参数进行修改,也可直接搜索寻找需要的参数。
三、日志参数设置(SD Logging)
1.日志记录模式
SD Logging——>SDLOG_MODE
决定日志记录的启动与停止时机。默认情况下,系统解锁(arming)时开始记录日志,上锁(disarming)时停止记录日志。
2.日志记录参数
SD Logging——>SDLOG_PROFILE
该参数用于控制日志主题的集合与记录频率。默认配置可支持常规日志分析,同时将日志文件大小控制在合理范围内。启用多个主题集合会提高带宽需求,并增大日志文件体积。将对应位勾选,即可启用以下主题集合:
0:默认集合(用于常规日志分析)
1:全速率估计器(EKF2)回放主题
2:热校准主题(高速率原始惯性测量单元(IMU)与气压计(Baro)传感器数据)
3:系统辨识主题(高速率执行器控制与惯性测量单元(IMU)数据)
4:快速机动分析全速率主题(遥控器(RC)、姿态、速率与执行器数据)
5:调试主题(debug_*.msg 格式主题,用于自定义代码调试)
6:传感器对比主题(低速率原始惯性测量单元(IMU)、气压计(Baro)与磁力计(Magnetomer)数据)
7:计算机视觉与避障主题
8:原始先进先出(FIFO)高速率惯性测量单元(IMU)(陀螺仪(Gyro))数据
9:原始先进先出(FIFO)高速率惯性测量单元(IMU)(加速度计(Accel))数据
10:MAVLink 隧道消息日志记录(对载荷通信调试有用)
注:如果想要记录低通滤波数据(FFT),需要勾选High rate。
四、解锁参数设置(Commander&Manual Control)
1.解锁激活开关触发方式
Commander——>COM_ARM_SWISBTN
0:解锁激活 / 解除激活在开关状态切换时触发(默认为此状态)
1:如油门操控杆拉到最下方,按住瞬时按钮并保持 COM_RC_ARM_HYST(遥控器解锁激活滞后期)时长后,触发解锁激活 / 解除激活
2.允许无GPS解锁
Commander——>COM_ARM_WO_GPS
默认状态下,载具在无 GPS 信号时仍可激活解锁,特别是有光流定位的场景下,需要将此参数设置为1.
3.允许解锁最大磁力计角度误差
Commander——>COM_ARM_MAG_ANG
允许解锁的最大磁力计角度误差(单位:度),若磁力计校准偏差超过此值,禁止解锁。默认值:30°(适用于一般环境)。调节场景:在强磁场干扰区域(如室内钢铁结构),可适当增大此值。设置为-1可禁用此项检查。
4.允许解锁的IMU加速度计最大偏差
Commander——>COM_ARM_IMU_ACC
允许解锁的IMU加速度计数据偏差阈值。若IMU数据超限(可能因振动或未校准),禁止解锁。
默认值:0.7m/s2(加速度计)。
5.允许解锁的IMU陀螺仪最大偏差
Commander——>COM_ARM_IMU_GYR
允许解锁的IMU陀螺仪数据偏差阈值。若IMU数据超限(1可能因振动或未校准),禁止解锁。
默认值:0.25rad/s(陀螺仪)。
6.允许解锁的最大高度估计误差
Commander——>COM_ARM_EKF_HGT
允许解锁的最大高度估计误差(单位:米),若EKF高度估计与传感器数据偏差过大,禁止解锁。默认值:1.0m。调节场景:在气压计受气流干扰时,可适当放宽(如2.0m)。
7.未起飞时自动解除解锁的超时时间
Commander——>COM_DISARM_PRFLT
非零正值指定时间(单位:秒),表示解锁后预计载具应在该时间内起飞。若载具未在该时间内起飞,将再次解除解锁;负值将禁用由起飞前超时触发的自动解除解锁功能。
8.着陆后自动解除解锁激活的超时时间
Commander——>COM_DISARM_LAND
非零正值用于指定超时时间(单位:秒);若检测到着陆状态,则超时后载具将自动解除解锁激活;零值或负值表示:禁用由着陆检测触发的自动解除解锁激活功能。
9.启用解锁/上锁摇杆手势
Manual Control——>MAN_ARM_GESTURE
该参数用于决定是否允许通过 “将左手摇杆推至右下象限” 执行飞行器解锁操作,以及通过 “将左手摇杆推至左下象限” 执行飞行器上锁操作。
五、系统安全检查(Circuit Breaker)
1.禁用电源检查
Circuit Breaker——>CBRK_SUPPLY_CHK
这个参数是检查解锁时是否有电池供电,默认是需要插电流计供电才可以解锁。如果想通过其他方式(如ESC供电)给飞控供电进行解锁,则需要设置该参数为894281。
2.禁用USB连接检查
Circuit Breaker——>CBRK_USB_CHK
这个参数是检查起飞时是否有USB连接,默认情况下有USB连接时是无法解锁的,如果需要插USB解锁,需要设置为197848。
3.安全开关检查
Circuit Breaker——>CBRK_IO_SAFETY
默认情况下安全开关是慢闪状态,设置该参数为22027时,上电后安全开关自动切换为双闪,无需操作安全开关即可解锁。
4.禁用蜂鸣器
Circuit Breaker——>CBRK_BUZZER
将此参数设置为 782097 将禁用蜂鸣器的音频通知功能。
5.禁用空速传感器检查
Circuit Breaker——>CBRK_AIRSPD_CHK
禁用空速传感器检查(固定翼模式下若无空速计会触发保护)。将此参数设置为 162128,固定翼无人机未安装空速传感器时解锁。
六、位置/速度环参数设置(Multicopter Position Control)
1.最大水平飞行速度
(1)Multicopter Position Control——>MPC_XY_VEL_MAX
指自动模式(AUTO mode)下的最大水平速度。如果在任务中指令的速度高于该值,实际速度会被限制在该数值范围内。
(2)Multicopter Position Control——>MPC_VEL_MANUAL
在手动控制模式下,若设定的水平速度设定值大于参数 “MPC_XY_VEL_MAX(水平最大速度上限)”,则该速度设定值会被限制在 “MPC_XY_VEL_MAX” 的数值范围内(即实际生效的速度设定值不会超过此上限)。
2.最大上升速度
(1)Multicopter Position Control——>MPC_Z_V_AUTO _UP
指设备在自动模式(Auto modes)下的上升速度标准值。若需了解手动模式和外部控制模式(Offboard)下的上升速度限制,请参考参数 “MPC_Z_VEL_MAX_UP(最大上升速度)”。
(2)Multicopter Position Control——>MPC_Z_VEL_MAX_UP
指设备在手动模式和外部控制模式(Offboard)下的上升速度上限。若需了解自动模式(Auto modes)下的上升速度限制,请参考参数 “MPC_Z_V_AUTO_UP(自动模式最大上升速度)”。
(3)Multicopter Position Control——>MPC_TKO_SPEED
起飞爬升率,设备在起飞阶段(从地面离地到达到目标起始高度的过程中),垂直方向上的上升速度,单位通常为 “米 / 秒(m/s)” ,是控制起飞阶段上升快慢的核心参数。
3.最大下降速度
(1)Multicopter Position Control——>MPC_Z_V_AUTO_DN
指设备在自动模式(Auto modes)下的下降速度标准值。若需了解手动模式和外部控制模式(Offboard)下的下降速度限制,请参考参数 “MPC_Z_VEL_MAX_DN(最大下降速度)”。
(2)Multicopter Position Control——>MPC_Z_VEL_MAX_DN
指设备在手动模式和外部控制模式(Offboard) 下的下降速度上限。若需了解自动模式(Auto modes)下的下降速度限制,请参考参数 “MPC_Z_V_AUTO_DN(自动模式最大下降速度)”。
4.最大加速度设置
(1)Multicopter Position Control——>MPC_ACC_HOR
自动模式与手动模式下的加速度(参数),注:在手动模式下,此参数仅在 MPC_POS_MODE 4(位置控制模式 4)中生效。
(2)Multicopter Position Control——>MPC_ACC_HOR_MAX
自动模式与手动模式下的最大水平加速度。
(3)Multicopter Position Control——>MPC_ACC_UP_MAX
速度控制模式下的最大垂直向上加速度。
(4)Multicopter Position Control——>MPC_ACC_DOWN_MAX
速度控制模式下的最大垂直向下加速度。
5.最大飞行倾角
(1)Multicopter Position Control——>MPC_TILTMAX_AIR
飞行中的最大倾斜角,限制设备在自动模式(AUTO)和位置控制模式(POSCTRL)下飞行时的最大倾斜角度。
(2)Multicopter Position Control——>MPC_TILTMAX_LND
着陆时的最大倾斜角,限制设备在着陆过程中允许的最大倾斜角度。
6.手动-位置控制子模式
Multicopter Position Control——>MPC_POS_MODE
该参数用于选择手动 - 位置控制模式下的具体子模式,支持的子模式及说明如下:
0(简单位置控制):操纵杆直接映射为速度设定值,无平滑处理。该模式适用于速度控制参数的调试。
3(平滑位置控制 - 基于加加速度优化轨迹生成器):具备平滑位置控制功能,可基于加加速度(jerk)优化轨迹生成器,设置最大加速度和最大加加速度限制(其算法与子模式 1 不同)。
4(平滑位置控制 - 操纵杆映射加速度 + 虚拟制动阻力):具备平滑位置控制功能,操纵杆映射为加速度设定值,且系统包含虚拟制动阻力(可模拟类似 “阻力” 的效果,辅助稳定速度与位置)。
注:当最大飞行速度设置较大时,此参数建议选择Direct velocity。
7.位置控制比例增益
(1)Multicopter Position Control——>MPC_XY_P
水平位置误差比例增益,该参数是水平位置控制系统中 “比例控制环节” 的核心系数,用于定义系统对 “水平位置误差” 的响应强度 —— 即根据设备实际水平位置与目标位置的偏差(误差),按比例计算出用于修正偏差的控制量(如调整机身倾斜角以产生水平推力),最终驱动设备向目标位置靠近。
(2)Multicopter Position Control——>MPC_Z_P
垂直位置误差比例增益,该参数是垂直位置控制系统中 “比例控制环节” 的核心系数,用于定义系统对 “垂直位置误差” 的响应强度。其作用逻辑为:根据设备实际高度(垂直位置)与目标高度的偏差(误差),按比例计算出用于修正偏差的控制量(如调整电机总推力),驱动设备向目标高度靠近。
8.水平速度控制PID
(1)Multicopter Position Control——>MPC_XY_VEL_P_ACC
水平速度误差比例增益,该参数的物理意义是:每单位速度误差(单位:m/s)对应的修正加速度(单位:m/s²)。
(2)Multicopter Position Control——>MPC_XY_VEL_I_ACC
水平速度误差积分增益,该参数的物理意义是:每单位速度积分量(单位:m)对应的修正加速度(单位:m/s²)。非零的参数值能够消除因风等干扰因素导致的稳态误差。
(3)Multicopter Position Control——>MPC_XY_VEL_D_ACC
水平速度误差微分增益,该参数用于水平速度控制系统中的 “微分控制环节”,其数值越小,越有助于抑制快速震荡;若数值过大,震荡现象会再次出现。该参数的物理意义是:每单位速度导数(单位:m/s²)对应的修正加速度(单位:m/s²)。
9.垂直速度控制PID
(1)Multicopter Position Control——>MPC_Z_VEL_P_ACC
垂直速度误差比例增益,该参数的物理意义是:每单位速度误差(单位:m/s)对应的修正加速度(单位:m/s²)。
(2)Multicopter Position Control——>MPC_Z_VEL_I_ACC
垂直速度误差积分增益,该参数的物理意义是:每单位速度积分量(单位:m)对应的修正加速度(单位:m/s²)。非零的参数值能够在稳定模式或自主起飞时实现悬停推力估算。
(3)Multicopter Position Control——>MPC_Z_VEL_D_ACC
垂直速度误差微分增益,该参数用于垂直速度控制系统中的 “微分控制环节”,其物理意义是:每单位速度导数(单位:m/s²)对应的修正加速度(单位:m/s²)。
10.整体最大速度限制
(1)Multicopter Position Control——>MPC_XY_VEL_ALL
整体水平速度限制,若将该参数设为大于0的值,其他相关参数(如MPC_XY_VEL_MAX(水平最大速度)或MPC_VEL_MANUAL(手动模式速度))会被自动设定。若设为负值,则使用已有的各项独立参数。
(2)Multicopter Position Control——>MPC_Z_VEL_ALL
整体垂直速度限制,若将该参数设为大于0的值,其他相关参数(如MPC_Z_VEL_MAX_UP(最大上升速度)或MPC_LAND_SPEED(着陆速度))会被自动设定。若设为负值,则使用已有的各项独立参数。
11.推力设置
(1)Multicopter Position Control——>MPC_THR_CURVE
手动模式下的推力曲线,该参数用于定义在手动模式 / 稳定模式(Manual/Stabilized flight mode)下,油门杆输入信号如何映射为指令推力。
若使用默认选项(“按悬停推力重新缩放”,Rescale to hover thrust),油门杆输入会进行线性重新缩放,使得油门杆居中时对应悬停油门(详见参数 MPC THR HOVER,悬停推力参数)。
选择 “不重新缩放”(No Rescale)时,油门杆输入会直接映射为输出。该选项适用于悬停推力极低的场景 —— 此时默认的重新缩放会导致推力映射严重失真(例如,若悬停推力设为 20%,则 80% 的上限推力范围会被压缩到油门杆上半段的行程中)。
(2)Multicopter Position Control——>MPC_THR_HOVER
悬停推力,指设备维持稳定悬停状态所需的垂直推力。该数值在手动油门控制中映射为油门杆的居中位置。若将此数值设为设备实际悬停所需的推力,那么在悬停状态下从手动模式切换至定高模式(Altitude mode)或位置模式(Position mode)时,油门杆会处于接近居中的位置 —— 此时该杆位会被系统解读为(接近)零垂直速度需求(即维持当前高度,不上升也不下降)。
七、姿态环参数设置(Multicopter Attitude Control)
1.最大俯仰角速率
Multicopter Attitude Control——>MC_PITCHRATE_MAX
该参数用于限制无人机在手动模式和自动模式(特技模式除外)下的俯仰角速度最大值,核心作用是通过约束 “俯仰动作的最大转动速度”,避免因过度激进的俯仰指令导致控制输出超限(如电机动力饱和)或姿态失控。其限制不仅取决于无人机的物理特性(如电机扭矩、机身惯性),还受陀螺仪的最大测量速率制约,是平衡机动性能与飞行安全的关键参数。
2.最大横滚角速率
Multicopter Attitude Control——>MC_ROLLRATE_MAX
该参数用于限制无人机在手动模式和自动模式(特技模式除外)下的横滚角速度最大值,核心作用是通过约束横滚动作的最大转动速度,防止因过度激进的横滚指令导致控制输出超限(如电机动力饱和)或姿态失控。其限制不仅取决于无人机的物理特性(如电机扭矩、机身惯性),还受陀螺仪最大测量速率的制约,是平衡横滚机动性能与飞行安全的关键参数。
3.最大偏航角速率
Multicopter Attitude Control——>MC_YAWRATE_MAX
该参数用于限制无人机在手动模式和自动模式(特技模式除外)下的偏航角速度最大值,核心作用是通过约束偏航动作的最大转动速度,防止因过度激进的偏航指令导致控制输出超限(如电机动力饱和)或姿态失控。其限制不仅取决于无人机的物理特性(如电机布局、扭矩输出),还受陀螺仪最大测量速率的制约,是平衡偏航机动性与飞行安全的关键参数。
4.姿态控制比例增益
(1)Multicopter Attitude Control——>MC_PITCH_P
俯仰比例增益,该参数是俯仰通道姿态控制环中的比例增益,其物理含义为:当俯仰角度偏差为1 弧度(rad) 时,该参数的数值将直接决定飞控输出的 “期望俯仰角速度”(单位:rad/s)。它是连接 “角度偏差” 与 “速率指令” 的核心桥梁,通过将角度误差转化为速率需求,驱动无人机快速修正俯仰姿态偏差。
在俯仰姿态控制的双层闭环结构中(外层角度环→内层速率环),比例增益(P)的作用是将角度偏差线性转化为速率指令,公式如下:
期望俯仰角速度 = 俯仰 P 增益 × 俯仰角度偏差
(2)Multicopter Attitude Control——>MC_ROLL_P
横滚比例增益,该参数是横滚通道姿态控制环中的核心比例增益,其物理定义为:当横滚角度偏差为 1 弧度(rad,约 57.3°) 时,飞控输出的 “期望横滚角速度”(单位:rad/s)。它的核心作用是构建 “横滚角度偏差” 与 “速率修正指令” 的线性关联,直接决定无人机对横滚姿态偏移的响应灵敏度,是横滚姿态快速回正与稳定控制的关键参数。
(3)Multicopter Attitude Control——>MC_YAW_P
偏航比例增益,该参数是偏航通道姿态控制环中的核心比例增益,其物理定义为:当偏航角度偏差为 1 弧度(rad,约 57.3°) 时,飞控输出的 “期望偏航角速度”(单位:rad/s)。它的核心作用是构建 “偏航角度偏差” 与 “速率修正指令” 的线性关联,直接决定无人机对航向偏移的响应灵敏度 —— 既要保证航向快速回正,又需适配偏航轴 “动力响应慢、惯性大” 的独特物理特性,避免引发航向震荡。
八、角速率环参数设置(Multicopter Rate Control)
1.特技模式最大速率
(1)Multicopter Rate Control——>MC_ACRO_P_MAX
特技模式最大俯仰速率,该参数用于设定飞行器在特技模式(Acro mode) 下的最大俯仰角速度,默认值为每秒 2 圈(2 turns per second,即 720°/ 秒)。
(2)Multicopter Rate Control——>MC_ACRO_R_MAX
特技模式最大横滚速率,该参数用于设定飞行器在特技模式(Acro mode) 下的最大横滚角速度,默认值为每秒 2 圈(2 turns per second,即 720°/ 秒)。
(3)Multicopter Rate Control——>MC_ACRO_Y_MAX
特技模式最大偏航速率,该参数用于设定飞行器在特技模式(Acro mode) 下的最大偏航角速度,默认值为每秒 1.5 圈(1.5 turns per second,即 540°/ 秒)。
2.俯仰速率控制PID
(1)Multicopter Rate Control——>MC_PITCHRATE_P
俯仰速率比例增益,该参数是俯仰通道速率控制环中的比例增益(P 增益),核心作用是根据 “实际俯仰角速度与目标俯仰角速度的偏差”,直接输出成比例的控制量 —— 其物理含义为:当俯仰角速度偏差为 1 弧度 / 秒(rad/s) 时,该参数的数值即为控制器输出的基础控制强度。
(2)Multicopter Rate Control——>MC_PITCHRATE_I
俯仰速率积分增益,该参数是俯仰通道速率控制环中的积分增益(I 增益),核心作用是通过累积 “实际俯仰角速度与目标角速度的长期偏差”,输出持续的修正量,从而补偿飞行器硬件层面的静态误差(如静态推力差异、重心偏移),最终实现俯仰速率的无静差控制。
(3)Multicopter Rate Control——>MC_PITCHRATE_D
俯仰速率微分增益,该参数是飞行器俯仰通道速率控制环中的微分增益(D 增益),核心作用是通过 “预判俯仰角速度的变化趋势” 来抑制快速震荡,优化俯仰姿态的稳定性。参数特性为:
较小数值可有效削弱高频、快速的姿态震荡;数值过大则会过度敏感于角速度的微小变化,反而引发新的震荡(如 “抖舵”)。
3.横滚速率控制PID
(1)Multicopter Rate Control——>MC_ROLLRATE_P
横滚速率比例增益,该参数是横滚通道速率控制环中的比例增益(P 增益),核心作用是根据 “实际横滚角速度与目标横滚角速度的偏差”,直接输出成比例的控制量 —— 其物理含义为:当横滚角速度偏差为 1 弧度 / 秒(rad/s) 时,该参数的数值即为控制器输出的基础控制强度。
(2)Multicopter Rate Control——>MC_ROLLRATE_I
横滚速率积分增益,该参数是横滚通道速率控制环中的积分增益(I 增益),核心作用是通过持续累积 “实际横滚角速度与目标角速度的长期偏差”,输出稳定的修正量,从而针对性补偿飞行器硬件层面的静态误差(如横滚轴电机静态推力不平衡、重心沿横滚轴偏移),最终实现横滚速率的 “无静差控制”(即长期运行中无持续偏差)。
(3)Multicopter Rate Control——>MC_ROLLRATE_D
横滚速率微分增益,该参数是飞行器横滚通道速率控制环中的微分增益(D 增益),核心作用是通过 “监测横滚角速度的变化趋势(即加速度)”,提前输出反向修正量,从而抑制横滚方向的快速震荡;其调节特性为:
较小数值可有效削弱高频、小幅的横滚震荡(如电机抖动、阵风引发的姿态波动);数值过大则会过度放大角速度的微小变化(如传感器噪声),反而引发新的高频震荡(如 “抖舵” 或横滚方向的往复摆动)。
4.偏航速率控制PID
(1)Multicopter Rate Control——>MC_YAWRATE_P
偏航速率比例增益,该参数是偏航通道速率控制环中的比例增益(P 增益),核心作用是根据 “实际偏航角速度与目标偏航角速度的偏差”,直接输出成比例的控制量 —— 其物理含义为:当偏航角速度偏差为 1 弧度 / 秒(rad/s) 时,该参数的数值即为控制器输出的基础控制强度,直接决定偏航动作对当前偏差的响应灵敏度。
(2)Multicopter Rate Control——>MC_YAWRATE_I
偏航速率积分增益,该参数是偏航通道速率控制环中的积分增益(I 增益),核心作用是通过持续累积 “实际偏航角速度与目标角速度的长期偏差”,输出稳定的修正量,从而针对性补偿偏航轴的静态误差(如左右电机静态推力不平衡、重心沿垂直轴偏移导致的恒定偏航力矩),最终实现偏航速率的 “无静差控制”—— 即长期运行中,航向不会因静态干扰持续漂移。
(3)Multicopter Rate Control——>MC_YAWRATE_D
偏航速率微分增益,该参数是飞行器偏航通道速率控制环中的微分增益(D 增益),核心作用是通过 “监测偏航角速度的变化趋势(即角加速度)”,提前输出反向修正量,从而抑制偏航方向的快速震荡;其调节特性与横滚 / 俯仰通道类似,但需适配偏航轴的独特物理特性:
较小数值可有效削弱偏航方向的高频、小幅震荡(如电机转速差引发的机身扭转波动、阵风导致的航向抖动);数值过大则会过度放大偏航角速度的微小变化(如传感器噪声、电机微小转速波动),反而引发新的高频震荡(如 “航向抖舵” 或偏航方向的往复摆动)。
九、降落控制参数(Land Detector)
1.多旋翼地效影响高度
Land Detector——>LNDMC_ALT_GND
指地面以上的高度值,当飞行器低于此高度时,地面效应会导致气压高度出现误差。若设为负值,则表示不考虑地面效应。
2.最大飞行高度
Land Detector——>LNDMC_ALT_MAX
系统会将此参数作为硬性高度限制严格遵守。该设置会与 “GF_MAX_VER_DIST”(地理围栏最大垂直距离)参数的限制进行整合(取两者中更严格的限制生效)。若设为负值,则表示无高度限制。
3.降落最大旋转角速度
Land Detector——>LNDMC_ROT_MAX
该参数定义了多旋翼飞行器在着地状态下,绕各个轴(滚转、俯仰、偏航轴)允许的最大角速度。
4.降落着地检测触发时间
Land Detector——>LNDMC_TRIG_TIME
该参数定义了多旋翼完成全部三个着地检测阶段所需的总时间。这三个阶段依次为:地面接触(ground contact)、可能着地(maybe landed)、着地确认(landed),且每个阶段均需持续满足对应必要条件。
(补充说明:多旋翼的着地检测并非单次判定,而是通过分阶段验证确保准确性,避免因短暂触地(如颠簸)或传感器误判导致 “误触发着地模式”(例如空中误判为着地而关闭动力)。
5.降落最大水平速度
Land Detector——>LNDMC_XY_VEL_MAX
该参数定义了多旋翼飞行器在着地状态下允许的最大水平速度。
6.降落最大爬升率
Land Detector——>LNDMC_Z_VEL_MAX
该参数定义了多旋翼飞行器在着地状态下允许的最大垂直速度。
十、自动返航设置(Return Mode)
1.返航模式高度椎体半角
Return Mode——>RTL_CONE_ANG
该参数用于定义以返航目标点(通常为起飞点)为中心的 “高度锥体” 的半角角度,通过控制锥体的陡峭程度,决定无人机在返航过程中何时开始从安全高度下降至着陆高度。它是优化返航路径安全性与效率的关键参数,直接影响无人机在接近目标点时的高度调整策略。
2.返航模式盘旋高度
Return Mode——>RTL_DESCEND_ALT
返航后下降至该高度(高于目标位置),并等待 “返航着陆延迟(RTL_LAND_DELAY)” 中设定的时间。若允许自动着陆,则从该高度开始着陆(即缓慢下降)。
3.返航航向模式
Return Mode——>RTL_HDG_MD
定义返航(RTL)过程中的航向行为。机头朝向如何控制(例如保持朝向起飞点、保持当前航向或按其他预设逻辑调整),直接影响返航过程中的飞行路径和姿态控制。
4.返航下降阶段盘旋半径
Return Mode——>RTL_LOITER_RAD
设置盘旋半径,以确保飞行器在(垂直起降)VTOL 过渡阶段能处于安全高度。
5.距返航点的水平半径
Return Mode——>RTL_MIN_DIST
返航高度将根据 RTL 锥角参数(RTL CONE_ANG)计算。偏航设定值将切换为对应航点所定义的值。
6.返航精准着陆模式
Return Mode——>RTL_PLD_MD
在执行返航(RTL)着陆阶段时,启用精准着陆功能。该模式是对返航(RTL)流程中 “着陆环节” 的优化设置。普通返航着陆可能仅依赖基础定位(如常规 GPS),而 “精准着陆” 通常结合更高级的定位技术(如视觉定位、RTK 差分定位等),能大幅提升着陆点的准确性,减少着陆偏差。
7.返航模式返航高度
Return Mode——>RTL_RETURN_ALT
返航飞行时,相对于目标点(如起飞点、安全点、着陆航线)的默认最低高度。该高度会受 “返航最小距离(RTL_MIN_DIST)” 和 “返航锥角(RTL_CONE_ANG)” 参数影响。
8.返航类型
Return Mode——>RTL_TYPE
返航模式的目标点及飞行路径(包括:起飞点、集结点、任务着陆航线、反向执行任务)。
十一、控制保护参数(Commander)
1.机载电脑保护
(1)Commander——>COM_OBC_LOSS_T
机载计算机连接丢失后,发出连接丢失警告前的等待超时时间。
(2)Commander——>COM_OBL_ACT
遥控器不可用时,设置板外丢失故障保护模式,板外丢失故障保护模式仅会在超时后进入,超时时间由参数 COM_OF_Loss_T(板外丢失超时参数)设定,单位为秒。
(3)Commander——>COM_OBL_RC_ACT
当遥控器(RC)可用时,设置板外丢失故障保护模式,板外丢失故障保护模式仅会在超时后进入,超时时间由参数 COM_OF_Loss_T(板外丢失超时参数)设定,单位为秒。
(4)Commander——>COM_OF_LOSS_T
板外连接丢失后,触发板外丢失应对动作前的等待超时时间,参数COM_OBL_ACT(板外丢失应对动作)和COM_OBL_RC_ACT(板外丢失遥控器应对动作)来配置应对动作。
2.RC保护
(1)Commander——>COM_RC_LOSS_T
遥控器(RC)丢失时间阈值,当遥控器连接中断持续时长达到该参数设定的秒数后,系统将判定遥控器已丢失,且不再使用该遥控器。
(2)Commander——>COM_RC_OVERRIDE
启用遥控器(RC)操纵杆对自动模式/或板外模式的超控功能,当遥控器操纵杆超控功能启用时,若遥控器操纵杆的移动幅度超过参数COM_RC_STICK_OV(遥控器操纵杆超控阈值)的设定值,系统会立即将控制权交还给飞行员,具体方式为切换至位置模式;若位置信息不可用,则切换至高度模式。
(3)Commander——>COM_RC_STICK_OV
遥控器(RC)操纵杆超控阈值,若参数 COM_RC_OVERRIDE(遥控器操纵杆超控使能参数)已启用,且操纵杆输入的移动幅度超过此阈值,则飞行员将接管控制权,自动驾驶系统(autopilot)停止控制。
(4)Commander——>NAV_RCL_ACT
设置遥控器(RC)丢失故障保护模式,遥控器丢失故障保护模式仅在超时后才会启动,超时时间由参数 COM_RC_LOSS_T(遥控器丢失超时参数)以秒为单位设定,若通过设置参数 COM_RC_IN_MODE(遥控器控制输入模式参数)禁用了遥控器输入检查功能,则该(遥控器丢失故障保护)模式不会被触发。
3.启用电机测试
Commander——>COM_MOT_TEST_EN
启用电机测试,若设为启用状态,将通过 MAVLink(无人机通信协议)启用电机测试接口(对应指令:DO_MOTOR_TEST),该接口可使电机转动以进行测试。
十二、IMU传感器滤波信号(Sensor)
关于低通滤波如何设置合适的参数,可以查看我的另一篇文章,《PX4日志分析详细教程-带常用日志数据内容》的第四章节,4、FFT数据分析:https://blog.csdn.net/weixin_44048031/article/details/154562469?fromshare=blogdetail&sharetype=blogdetail&sharerId=154562469&sharerefer=PC&sharesource=weixin_44048031&sharefrom=from_link
1.加速度计滤波
Sensor——>IMU_ACCEL_CUTOFF
该参数为主要加速度计所使用的二阶巴特沃斯滤波器的截止频率,用于滤除高频噪声。此频率仅影响发送至控制器的信号延时情况,不影响估算器(的信号)。数值设为 0 时,滤波器将禁用。
2.陀螺仪滤波
Sensor——>IMU_GYRO_CUTOFF
该参数为主要陀螺仪所使用的二阶巴特沃斯滤波器的截止频率,用于滤除高频噪声,平滑角速度数据。此频率仅影响发送至控制器的角速度的信号延时,不影响估算器(的信号)。它也适用于角加速度(D 项滤波器),参见 IMU DGYRO CUTOFF 参数。数值设为 0 时,滤波器将禁用。
3.陀螺仪微分信号
Sensor——>IMU_DGYRO_CUTOFF
该参数是用于测量角加速度时间导数的二阶巴特沃斯滤波器的截止频率,在速率控制器中也被称为 D 项滤波器。D 项基于速率的导数(进行计算),因此对噪声最为敏感。
因此,使用 D 项滤波器可提高 IMU(惯性测量单元)陀螺仪截止频率(IMU GYRO CUTOFF),进而降低控制延迟,并允许提高比例增益(P gains)。数值设为 0 时,滤波器将禁用。
十三、MAVLink接口配置(MAVLink)
1.MAVLink实例0的通讯接口
MAVLink——>MAV_0_CONFIG
配置用于运行 MAVLink(微型自动驾驶仪通信协议)的串口,此处特指实例 0(即第一个 MAVLink 通信实例)对应的硬件串口,默认TELEM1。
注:实例 0(instance 0):飞控通常支持多个 MAVLink 实例(如 instance 0、instance 1),每个实例对应独立的串口和通信任务,实例 0 是默认的主通信实例,优先用于飞控与地面站的核心数据传输。
2.MAVLink实例0的模式
MAVLink——>MAV_0_MODE
MAVLink 模式定义了 MAVLink 实例 0(主通信实例)的流式消息集合(例如飞行器的姿态数据、位置数据等)及其发送速率(例如每秒发送 10 次姿态消息)。
3.MAVLink实例0的最大发送速率
MAVLink——>MAV_0_RATE
该参数用于配置 MAVLink 实例 0(主通信实例)的流式消息最大发送速率,单位为字节 / 秒(Bytes/sec)。若配置的消息流总速率超过此最大值,系统会自动降低各消息流的发送速率。若将此值设为 0,则默认使用理论最大带宽的一半,相当于波特率 / 20 Bytes/s(在 8N1 配置的链路上,波特率 / 10 为最大数据速率)。
4.MAVLink实例0的消息转发
MAVLink——>MAV_0_FORWARD
若启用此功能,当接收到的 MAVLink 消息为广播消息,或消息目标并非自动驾驶仪时,系统会将这些消息转发至其他 MAVLink 端口。
这一功能的典型应用场景是:地面控制站(GCS)可与通过 MAVLink 连接到自动驾驶仪的相机(连接在与地面控制站不同的链路上)进行通信。
十四、外部定位数据设置(EKF2)
1.定位数据来源设置
(1)EKF2——>EKF2_AID_MASK
控制 EKF(扩展卡尔曼滤波器)的数据融合方式及各类辅助信息的使用逻辑。
设置规则:将以下对应位置的位设为 1(真)即启用该功能,设为 0(假)则禁用。
各 bit 位功能说明:
bit 0:若设为 1,当 GPS 数据可用时,启用 GPS 数据融合(用于位置、速度估计等)。
bit 1:若设为 1,当光流(optical flow)数据可用时,启用光流数据融合(通常用于无 GPS 环境下的低空位置稳定)。
bit 2:若设为 1,禁止 IMU(惯性测量单元)的速度变化量(delta velocity)偏差估计(即暂停对 IMU 加速度计偏差的动态学习)。
bit 3:若设为 1,启用视觉位置融合(将视觉传感器(如摄像头)提供的位置信息融入 EKF 状态估计)。
bit 4:若设为 1,启用视觉偏航融合(将视觉传感器提供的偏航角信息融入 EKF)。
⚠️ 限制:不能与 bit 7 同时设为 1(两者互斥)。
bit 5:若设为 1,启用多旋翼阻力比力融合(针对多旋翼无人机,将空气阻力产生的比力(单位质量受力)模型融入 EKF,提升高风速下的估计精度)。
bit 6:若设为 1,表示外部视觉(EV)观测数据的坐标系不是 NED(北 - 东 - 地)坐标系,需要先进行坐标旋转再用于融合(确保数据与 EKF 内部坐标系一致)。
bit 7:若设为 1,启用 GPS 偏航融合(将 GPS 提供的偏航角信息融入 EKF)。
⚠️ 限制:不能与 bit 4 同时设为 1(两者互斥)。
(2)EKF2——>EKF2_HGT_MODE
EKF 高度数据主要来源选择,该参数用于指定 EKF(扩展卡尔曼滤波器)在估计无人机高度时,优先采用的核心数据源。不同数据源的适用场景与精度特性差异显著,选择需结合飞行环境(如是否在平坦表面)、传感器配置(如有无激光雷达 / 超声测距仪)及高度控制需求,直接影响高度估计的稳定性与准确性。
2.IMU噪声参数
(1)EKF2——>EKF2_ACC_NOISE
加速度计测量噪声(单位:m/s2),值越大表示信任加速度计数据的程度越低。
(2)EKF2——>EKF2_GYR_NOISE
陀螺仪测量噪声(单位:rad/s),值越大表示信任陀螺仪数据的程度越低。
3.GPS噪声参数
(1)EKF2——>EKF2_GPS_P_NOISE
GPS水平位置噪声(单位:m),值越大表示GPS水平定位越不可靠。
(2)EKF2——>EKF2_GPS_V_NOISE
GPS速度噪声(单位:m/s),值越大表示GPS速度数据越不可靠。
4.磁力计噪声参数
EKF2——>EKF2_MAG_E_NOISE
磁场测量噪声(单位:Gauss),值越大表示磁力计数据越不可靠。
5.气压计噪声参数
EKF2——>EKF2_BARO_NOISE
气压计噪声(单位:m),影响高度估计的平滑性。
6.风速测量噪声
EKF2——>EKF2_WIND_NOISE
风速估计过程噪声(单位:m/s2),控制风速估计的响应速度。
7.GPS融合阈值
(1)EKF2——>EKF2_REQ_EPH
GPS水平定位精度阈值(单位:m),超过此值则拒绝使用GPS数据。
(2)EKF2——>EKF2_REQ_EPV
GPS垂直定位精度阈值(单位:m),超过此值则拒绝使用GPS数据。
十五、参数文件导出和导入
完成相关参数配置,可以将配置的参数导出为本地参数配置文件(params),在其他同款机型使用时,可以直接导入。
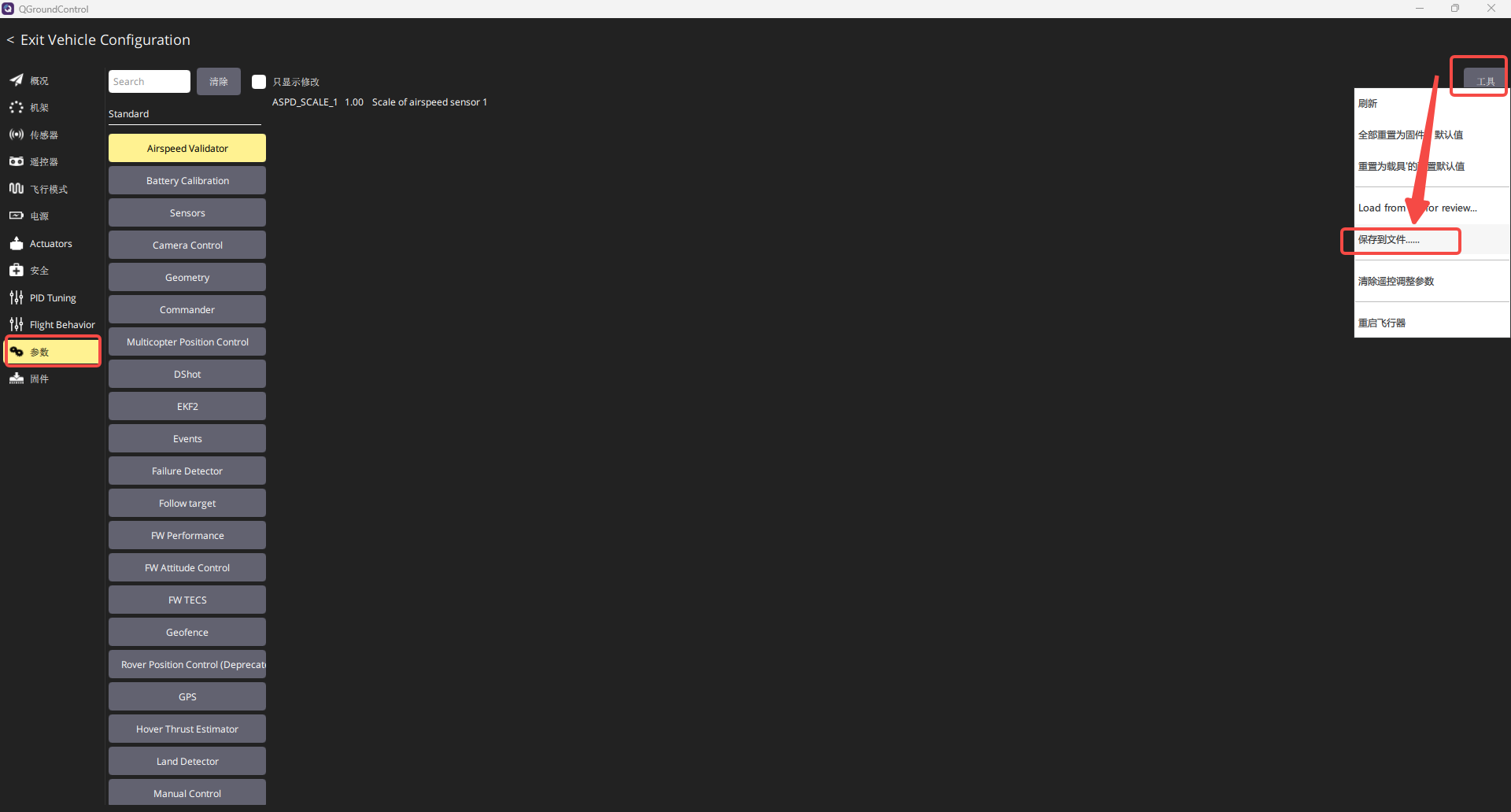
1.参数配置文件导出
QGC地面站连接飞控后,进入参数界面,选择右侧“工具”功能,选择“保存到文件”,然后给文件命名并选择保存地址,即可将参数保存到本地存储。
2.参数配置文件导入
同款机型使用时,可以直接导入之前保存到本地的配置文件,将需要加载参数的无人机连接至QGC地面站,注意需要加载参数的无人机必须和保存的参数的固件版本、机架类型、飞控硬件等信息一致,否则可能炸机。
如果固件版本不一致,就先刷一下相应的固件,再加载参数,固件一致后,进入参数界面,选择右侧“工具”功能,点击重置参数为固件的默认值,然后选择“Load from file for review...”,找到需要加载的文件地址,选中后选择打开,即可完成。
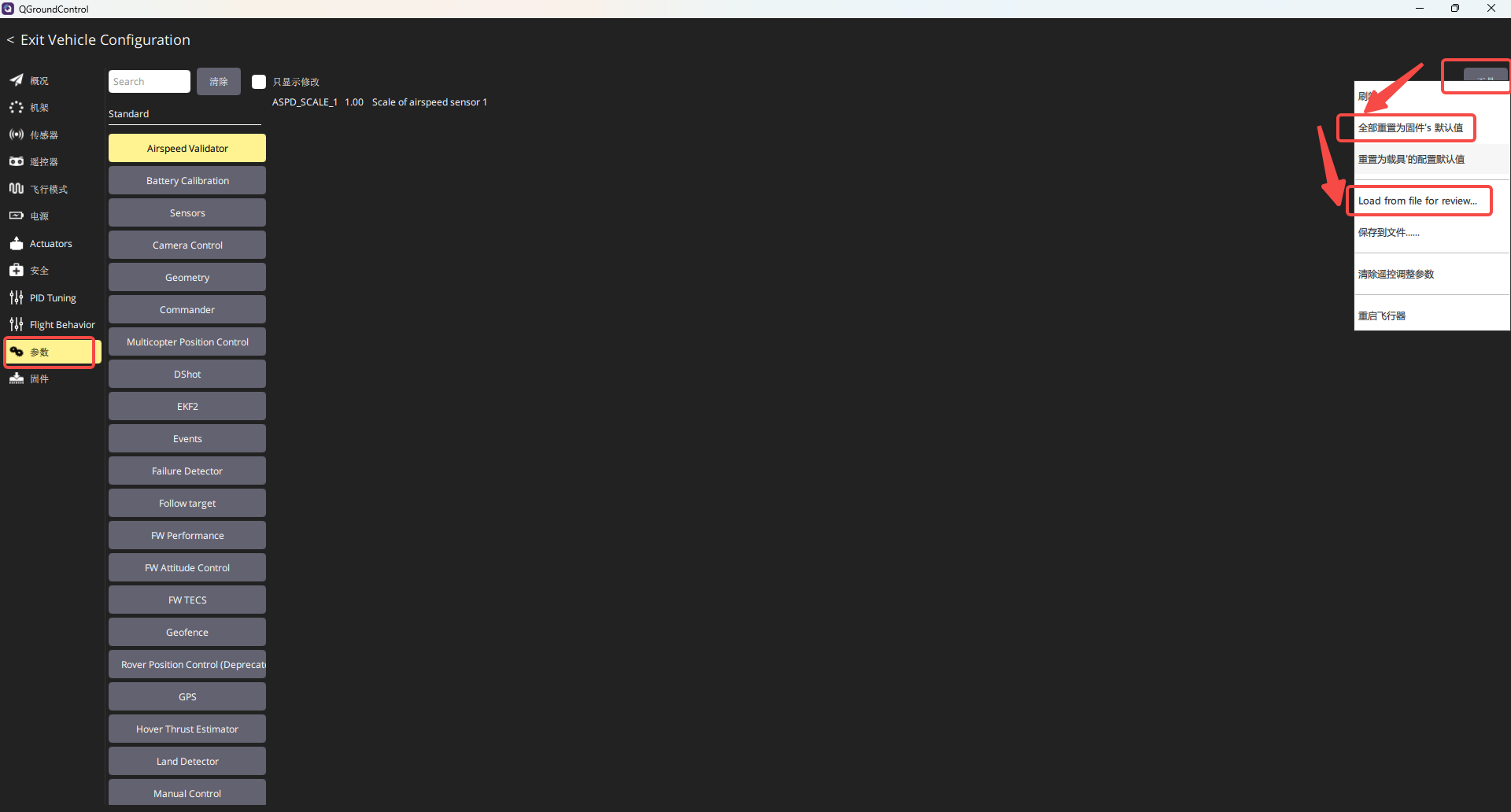
导入正常的话地面站上面所有的参数都是正常的,没有红色的提示。
常用的PX4参数先总结到这,后续发现有其他需要使用的参数,我再更新该文章。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 25
25 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)