【必学收藏】大模型训练新范式:RLHF为何被DPO取代?
文章详细介绍了大模型训练中从RLHF到DPO的演进过程。RLHF通过监督微调、奖励学习和强化学习三步实现模型对齐,但存在训练不稳定、成本高等问题。DPO作为改进方法,消除了奖励模型和强化学习环节,直接利用二元偏好数据对模型进行参数更新,简化了训练流程,降低了计算成本,提高了训练稳定性,成为更高效的大模型对齐方法。
文章详细介绍了大模型训练中从RLHF到DPO的演进过程。RLHF通过监督微调、奖励学习和强化学习三步实现模型对齐,但存在训练不稳定、成本高等问题。DPO作为改进方法,消除了奖励模型和强化学习环节,直接利用二元偏好数据对模型进行参数更新,简化了训练流程,降低了计算成本,提高了训练稳定性,成为更高效的大模型对齐方法。
概要
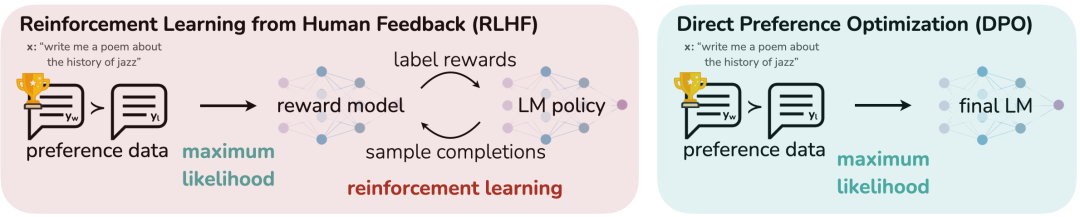
虽然大规模无监督语言模型能够学习广泛的世界知识,并拥有一些推理能力,但由于其训练的完全无监督性质,精确控制其行为是相对来说还是很困难的。而要想去实现这种精准控制,可以使用人类反馈强化学习,其简称为RLHF:是通过收集高质量的人工打标签的数据,并使用无监督微调训练来进行偏好一致对齐。然而强化学习是一个复杂且不稳定的训练过程,其过程表现为:首先我们要先拟合一个反映人类偏好的奖励模型,然后使用强化学习对大规模无监督LM进行微调,以最大化这个估计的奖励,同时又不偏离原始模型太远(RLHF原理),具体第二张下图所示,展示了RLHF的训练步骤 或者说是阶段吧。
既然有了PPO,为啥还要有DPO呢?(既生瑜何生亮)可以看下图,答案不着急,后面也会讲解PPO以及其劣势,从而引出DPO的存在。
强化学习(RLHF)
openai在InstructGPT的技术报告指出:ChatGPT使用RLHF的 "三步走"策略,即:监督微调(SFT)、偏好采样和奖励学习(RM)、强化学习(PPO),对应了上图中三个训练阶段,现在我们来对这三个简单讲解下。
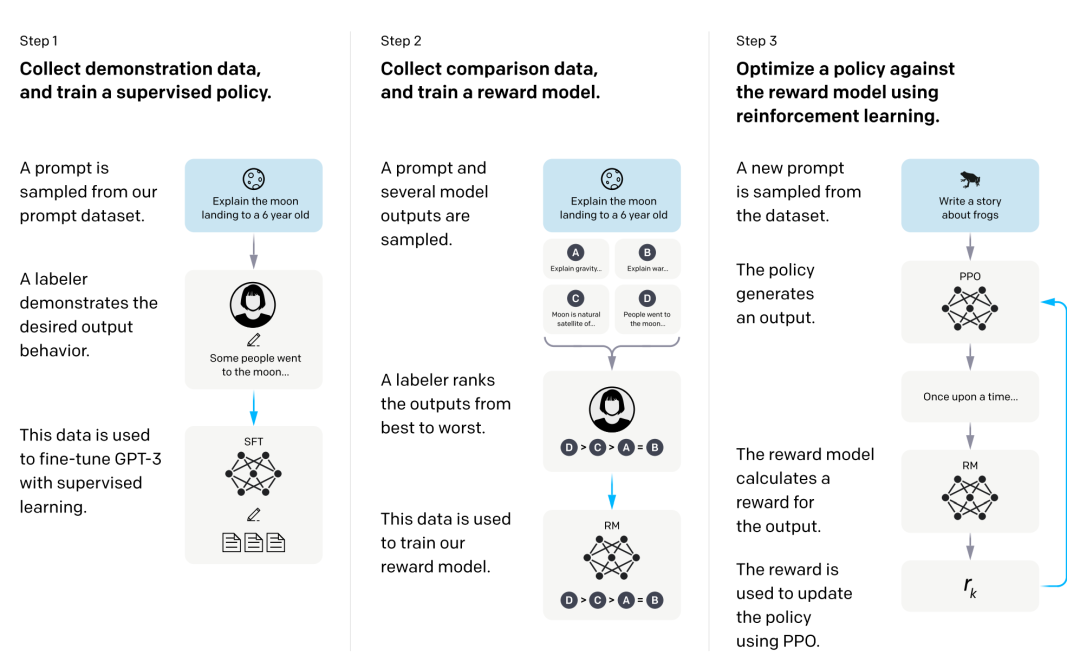
监督微调(SFT): 首先在下游感兴趣的任务使用高质量数据(对话、摘要等)和监督学习对预训练的 LM 进行微调,以获得一个模型(sft模型) 。
偏好采样和奖励学习(RM): 使用提示词方法,来生成偏好数据对(注意:第一阶段微调后的sft模型),那什么是偏好数据对呢?
{
"conversations": [
{
"from": "human", #人类指令
"value": "老虎会吃哪一个,草还是树叶?"
}
],
"chosen": {
"from": "gpt", #优质回答
"value": "我很高兴能帮助你解答问题!不过,我必须指出,这个问题本身可能没有意义。老虎是食肉动物,通常不吃草或树叶。它们的饮食主要包括大型有蹄动物、小型哺乳动物和鸟类。\n\n如果你提出这个问题是出于好奇或有特定原因,我很乐意帮助你找到更多关于老虎饮食习惯的信息,或者建议资源让你更多了解这些壮丽的生物。请告诉我如何进一步协助你!"
},
"rejected": {
"from": "gpt", # 劣质回答
"value": "一只老虎是食肉动物,这意味着它的饮食主要是肉类。老虎主要猎捕和吃其他动物,如鹿和野猪。它们不会选择吃草或树叶,因为这些不是它们自然饮食的一部分。"
}
}
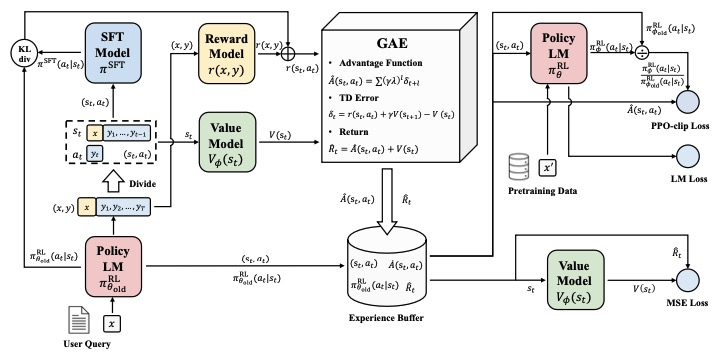
强化学习(PPO):RLHF训练过程主要有四个模型参与,分别是Actor Model 、Reference Model、Reward Model、Critic Model,他们在整个过程的角色如下:
Actor Model(动作模型):需要优化的语言模型,负责生成实际的文本回答,参数会在训练过程中不断更新。
Reference Model(参考模型):Actor Model 的初始副本,参数固定不变,用于计算 KL 散度,防止 Actor 与初始模型偏离太远。
Reward Model(奖励模型):经过人类偏好训练的评分模型,为 Actor 生成的文本提供奖励信号,指导 Actor 向更好的方向优化。
Critic Model(评论模型):估计价值函数,预测动作的长期收益,帮助 PPO 算法更好地优化 Actor。
四个模型之前具体的协作,这里就不做详细介绍,毕竟写的是DPO详解啊。
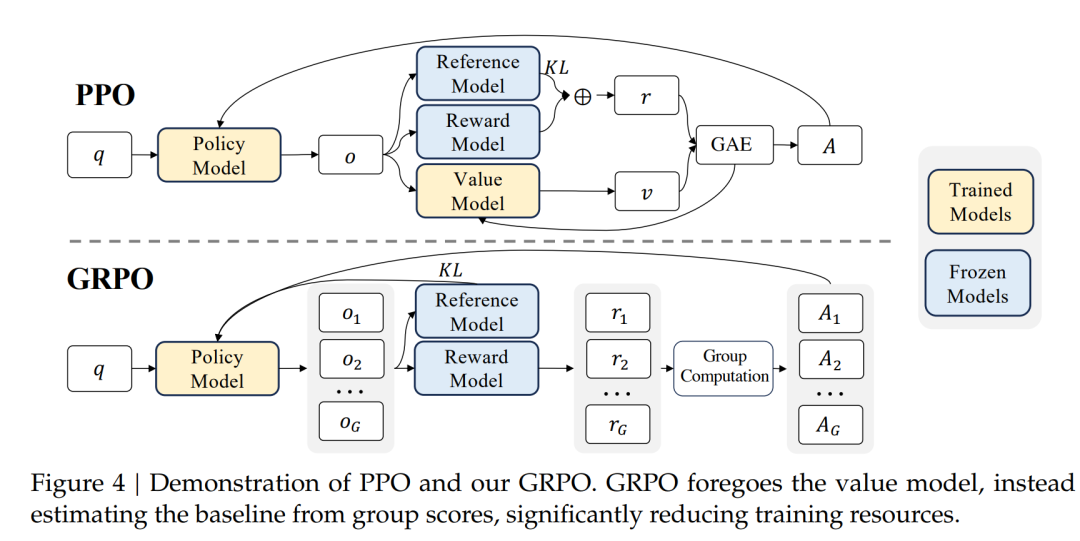
都知道PPO很好,为啥还要出来DPO呢?这是因为很多工程人员发现PPO很难训练,总结具体如下:
(1)奖励模型RM的准确率较低,在现有的偏好数据上只能训到70%~80%。这一方面是因为人类偏好较难拟合,另一方面是因为奖励模型一般较小,过大的奖励模型会引起PPO阶段训练的崩溃;
(2)PPO训练不稳定,相同的参数和数据也有可能出现不一样的结果;
(3)PPO阶段训练成本大。这是因为策略模型的更新依赖于奖励模型的显式反馈,所以每个训练step耗时长、GPU消耗大。
说白了就是PPO很难训练,并且消耗很大,看看上面的图就知道,四个模型都要参与,这谁顶得住啊?
正因为这些原因,斯坦福大学研究者提出了DPO,从理论上消除了奖励模型RM和与之相关的RL环节,直接采用二元偏好数据对LLMs进行参数更新。
DPO理论理解
之前我们说使用sft模型来生成偏好数据对,然后RM模型来进行评分并给出对应的奖励,让actor model来自适应调整。而DPO就是从理论来消除RM模型的存在,咱们就从Bradley-Terry模型开始(因为论文也是从这个模型开始的,哈哈),BT模型规定了人类偏好分布可以表示为:

看着是不是好像也挺简单的,其实这个式子还可以简化。针对静态数据集D,上面的奖励模型通过对数极大似然估计可以表示为:
数据集:
对数似然估计损失表示:

是的,通用损失函数数学表达式其实已经出来了,但是DPO其实是PPO的一个简化版,所以需要从PPO的损失来简化(DPO其实就是PPO的钙化版、或者说是简化版),直到推导出DPO的损失函数表达式
所以针对用于PPO的损失,上式可以优化为:

针对PPO而言,KL散度很重要,这是为啥?因为KL散度就表示Reference Model(参考模型) 和自己训练的Actor Model 有没有跑偏。大白话就是:这个训练就是让actor model训练,但是我也要拽着你,不然你偏离 reference model太远,如果太远,就训飞了。
因此针对KL散度优化,上面的式子可以进行推导为:
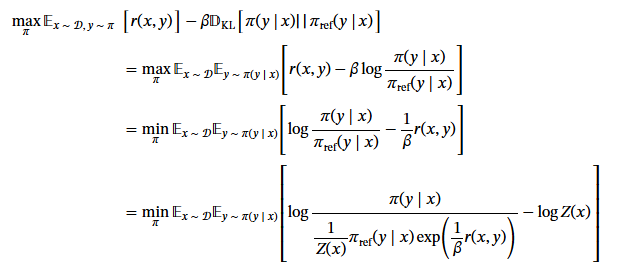
进一步简化:

其中Z(x)表示为:

然后经过一顿数学操作和优化:


得到了最后的loss:

其中 ,πθ 是正在训练的模型 ;πref 是参考模型(通常是 SFT 模型);yw 是首选(获胜)的答案;yl 是被拒绝(输掉)的反应;β 是控制优化强度的温度参数;σ 是 sigmoid函数。
一开始看这些式子是不是挺容易的,但是后面的数学变换和优化操作下来,看懵了,但是不要紧,你就记住最后这个式子就行,因为DPO的损失优化就是通过这个式子来的。
DPO代码片段
损失函数代码:
def preference_loss(policy_chosen_logps: torch.FloatTensor,
policy_rejected_logps: torch.FloatTensor,
reference_chosen_logps: torch.FloatTensor,
reference_rejected_logps: torch.FloatTensor,
beta: float,
label_smoothing: float = 0.0,
ipo: bool = False,
reference_free: bool = False) -> Tuple[torch.FloatTensor, torch.FloatTensor, torch.FloatTensor]:
"""Compute the DPO loss for a batch of policy and reference model log probabilities.
Args:
policy_chosen_logps: Log probabilities of the policy model for the chosen responses. Shape: (batch_size,)
policy_rejected_logps: Log probabilities of the policy model for the rejected responses. Shape: (batch_size,)
reference_chosen_logps: Log probabilities of the reference model for the chosen responses. Shape: (batch_size,)
reference_rejected_logps: Log probabilities of the reference model for the rejected responses. Shape: (batch_size,)
beta: Temperature parameter for the DPO loss, typically something in the range of 0.1 to 0.5. We ignore the reference model as beta -> 0.
label_smoothing: conservativeness for DPO loss, which assumes that preferences are noisy (flipped with probability label_smoothing)
ipo: If True, use the IPO loss instead of the DPO loss.
reference_free: If True, we ignore the _provided_ reference model and implicitly use a reference model that assigns equal probability to all responses.
Returns:
A tuple of three tensors: (losses, chosen_rewards, rejected_rewards).
The losses tensor contains the DPO loss for each example in the batch.
The chosen_rewards and rejected_rewards tensors contain the rewards for the chosen and rejected responses, respectively.
"""
pi_logratios = policy_chosen_logps - policy_rejected_logps
ref_logratios = reference_chosen_logps - reference_rejected_logps
if reference_free:
ref_logratios = 0
logits = pi_logratios - ref_logratios # also known as h_{\pi_\theta}^{y_w,y_l}
if ipo:
losses = (logits - 1/(2 * beta)) ** 2 # Eq. 17 of https://arxiv.org/pdf/2310.12036v2.pdf
else:
# Eq. 3 https://ericmitchell.ai/cdpo.pdf; label_smoothing=0 gives original DPO (Eq. 7 of https://arxiv.org/pdf/2305.18290.pdf)
losses = -F.logsigmoid(beta * logits) * (1 - label_smoothing) - F.logsigmoid(-beta * logits) * label_smoothing
chosen_rewards = beta * (policy_chosen_logps - reference_chosen_logps).detach()
rejected_rewards = beta * (policy_rejected_logps - reference_rejected_logps).detach()
return losses, chosen_rewards, rejected_rewards
可以看看第26、27、32、35行,这几行都是DPO核心,也完全按照这篇DPO论文来实现的。为了方便整合在一起看就是:
losses = (((policy_chosen_logps - policy_rejected_logps) - (reference_chosen_logps - reference_rejected_logps)) - 1/(2 * beta)) ** 2
DPO训练案例
下列代码使用了TRL库来进行微调训练,方式也比较简单,目的就是打造人人可学大模型,哈哈。
from trl import DPOConfig, DPOTrainer
from transformers import AutoModelForCausalLM, AutoTokenizer
from datasets import load_dataset
# 加载 model and tokenizer
model = AutoModelForCausalLM.from_pretrained("HuggingFaceTB/SmolLM3-3B")
tokenizer = AutoTokenizer.from_pretrained("HuggingFaceTB/SmolLM3-3B")
# 配置 DPO training
training_args = DPOConfig(
beta=0.1, # Temperature parameter
learning_rate=5e-7, # Lower LR for stability
max_prompt_length=512, # Maximum prompt length
max_length=1024, # Maximum total length
per_device_train_batch_size=4,
gradient_accumulation_steps=4,
num_train_epochs=1,
)
# 加载数据集
preference_dataset = load_dataset("argilla/ultrafeedback-binarized", split="train_prefs")
# 初始化DPO
trainer = DPOTrainer(
model=model,
args=training_args,
train_dataset=preference_dataset,
processing_class=tokenizer,
)
# 训练
trainer.train()
这一套是完全可以使用的,如果你有自己的数据集,只需要将数据集改成自己的数据集即可。
当然DPO现在也有很多扩展算法,这些算法都是去优化或改进loss目标函数:
IPO (Identity Preference Optimization)
KTO:Kahneman-Tversky Optimization
RSO:Rejection Sampling Optimization
SamPO:Down-Sampled DPO
如何学习大模型 AI ?
由于新岗位的生产效率,要优于被取代岗位的生产效率,所以实际上整个社会的生产效率是提升的。
但是具体到个人,只能说是:
“最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。
这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。
我在一线科技企业深耕十二载,见证过太多因技术卡位而跃迁的案例。那些率先拥抱 AI 的同事,早已在效率与薪资上形成代际优势,我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在大模型的学习中的很多困惑。我们整理出这套 AI 大模型突围资料包:
- ✅ 从零到一的 AI 学习路径图
- ✅ 大模型调优实战手册(附医疗/金融等大厂真实案例)
- ✅ 百度/阿里专家闭门录播课
- ✅ 大模型当下最新行业报告
- ✅ 真实大厂面试真题
- ✅ 2025 最新岗位需求图谱
所有资料 ⚡️ ,朋友们如果有需要 《AI大模型入门+进阶学习资源包》,下方扫码获取~
① 全套AI大模型应用开发视频教程
(包含提示工程、RAG、LangChain、Agent、模型微调与部署、DeepSeek等技术点)
② 大模型系统化学习路线
作为学习AI大模型技术的新手,方向至关重要。 正确的学习路线可以为你节省时间,少走弯路;方向不对,努力白费。这里我给大家准备了一份最科学最系统的学习成长路线图和学习规划,带你从零基础入门到精通!
③ 大模型学习书籍&文档
学习AI大模型离不开书籍文档,我精选了一系列大模型技术的书籍和学习文档(电子版),它们由领域内的顶尖专家撰写,内容全面、深入、详尽,为你学习大模型提供坚实的理论基础。
④ AI大模型最新行业报告
2025最新行业报告,针对不同行业的现状、趋势、问题、机会等进行系统地调研和评估,以了解哪些行业更适合引入大模型的技术和应用,以及在哪些方面可以发挥大模型的优势。
⑤ 大模型项目实战&配套源码
学以致用,在项目实战中检验和巩固你所学到的知识,同时为你找工作就业和职业发展打下坚实的基础。
⑥ 大模型大厂面试真题
面试不仅是技术的较量,更需要充分的准备。在你已经掌握了大模型技术之后,就需要开始准备面试,我精心整理了一份大模型面试题库,涵盖当前面试中可能遇到的各种技术问题,让你在面试中游刃有余。

以上资料如何领取?

为什么大家都在学大模型?
最近科技巨头英特尔宣布裁员2万人,传统岗位不断缩减,但AI相关技术岗疯狂扩招,有3-5年经验,大厂薪资就能给到50K*20薪!

不出1年,“有AI项目经验”将成为投递简历的门槛。
风口之下,与其像“温水煮青蛙”一样坐等被行业淘汰,不如先人一步,掌握AI大模型原理+应用技术+项目实操经验,“顺风”翻盘!

这些资料真的有用吗?
这份资料由我和鲁为民博士(北京清华大学学士和美国加州理工学院博士)共同整理,现任上海殷泊信息科技CEO,其创立的MoPaaS云平台获Forrester全球’强劲表现者’认证,服务航天科工、国家电网等1000+企业,以第一作者在IEEE Transactions发表论文50+篇,获NASA JPL火星探测系统强化学习专利等35项中美专利。本套AI大模型课程由清华大学-加州理工双料博士、吴文俊人工智能奖得主鲁为民教授领衔研发。
资料内容涵盖了从入门到进阶的各类视频教程和实战项目,无论你是小白还是有些技术基础的技术人员,这份资料都绝对能帮助你提升薪资待遇,转行大模型岗位。

以上全套大模型资料如何领取?


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 15
15 0
0- 0



 已为社区贡献397条内容
已为社区贡献397条内容

所有评论(0)