【OpenAI】张量全解析:从数学原理到Python实战,掌握AI核心数据结构!获取OpenAI API KEY的两种方式,开发者必看全方面教程!
/ 目标转速,放大10倍// 实际转速,放大10倍// 当前误差// 上一次误差// 误差积分int32_t kp;// 比例系数,放大1000倍int32_t ki;// 积分系数,放大1000倍int32_t kd;// 微分系数,放大1000倍// PID输出## 第二种方式(国内):获取 能用AI API Key要开始使用 能用AI 的服务,以下是获取 API Key 的详细步骤:###
·
@[TOC]# 基于STM32的PID电机速度控制详解
目录
引言
嵌入式系统中,电机速度控制是最常见的应用之一。本文以STM32为例,结合PID控制算法,详细介绍如何实现高效、稳定的电机速度闭环控制。内容涵盖控制理论、代码实现、调试技巧及常见问题,适合嵌入式开发初学者和工程实践者参考。
一、嵌入式控制基础
嵌入式控制系统通常采用闭环控制结构,核心流程为:
- 采集:通过传感器采集电机转速信号。
- 计算:利用控制算法计算控制量。
- 驱动:通过PWM等方式驱动电机。
- 反馈:实时反馈转速,调整控制策略。
注意:嵌入式系统资源有限,控制算法需兼顾实时性和计算效率。
二、PID控制理论简述
PID控制器由比例(P)、积分(I)、微分(D)三部分组成:
u ( k ) = K p e ( k ) + K i ∑ i = 0 k e ( i ) + K d ( e ( k ) − e ( k − 1 ) ) u(k) = K_p e(k) + K_i \sum_{i=0}^k e(i) + K_d (e(k) - e(k-1)) u(k)=Kpe(k)+Kii=0∑ke(i)+Kd(e(k)−e(k−1))
- e ( k ) e(k) e(k):当前误差,目标转速与实际转速之差。
- K p K_p Kp:比例系数,调节响应速度。
- K i K_i Ki:积分系数,消除稳态误差。
- K d K_d Kd:微分系数,抑制震荡。
三、工程实现关键点
- 固定采样周期:保证控制算法稳定运行。
- 信号滤波:减少传感器噪声影响。
- 定点运算:避免浮点运算带来的性能瓶颈。
- 输出限幅:防止积分饱和和执行器过载。
四、STM32 PID控制代码解析
PID结构体定义
typedef struct {
int32_t target; // 目标转速,放大10倍
int32_t actual; // 实际转速,放大10倍
int32_t err; // 当前误差
int32_t err_last; // 上一次误差
int32_t err_sum; // 误差积分
int32_t kp; // 比例系数,放大1000倍
int32_t ki; // 积分系数,放大1000倍
int32_t kd; // 微分系数,放大1000倍
int32_t output; // PID输出
} PID_TypeDef;
## 第二种方式(国内):获取 能用AI API Key
要开始使用 能用AI 的服务,以下是获取 API Key 的详细步骤:
### 1. 点击 [能用AI 工具]
在浏览器中打开 [能用AI 工具](https://ai.nengyongai.cn/register?aff=PEeJ)。

### 2. . 进入 API 管理界面
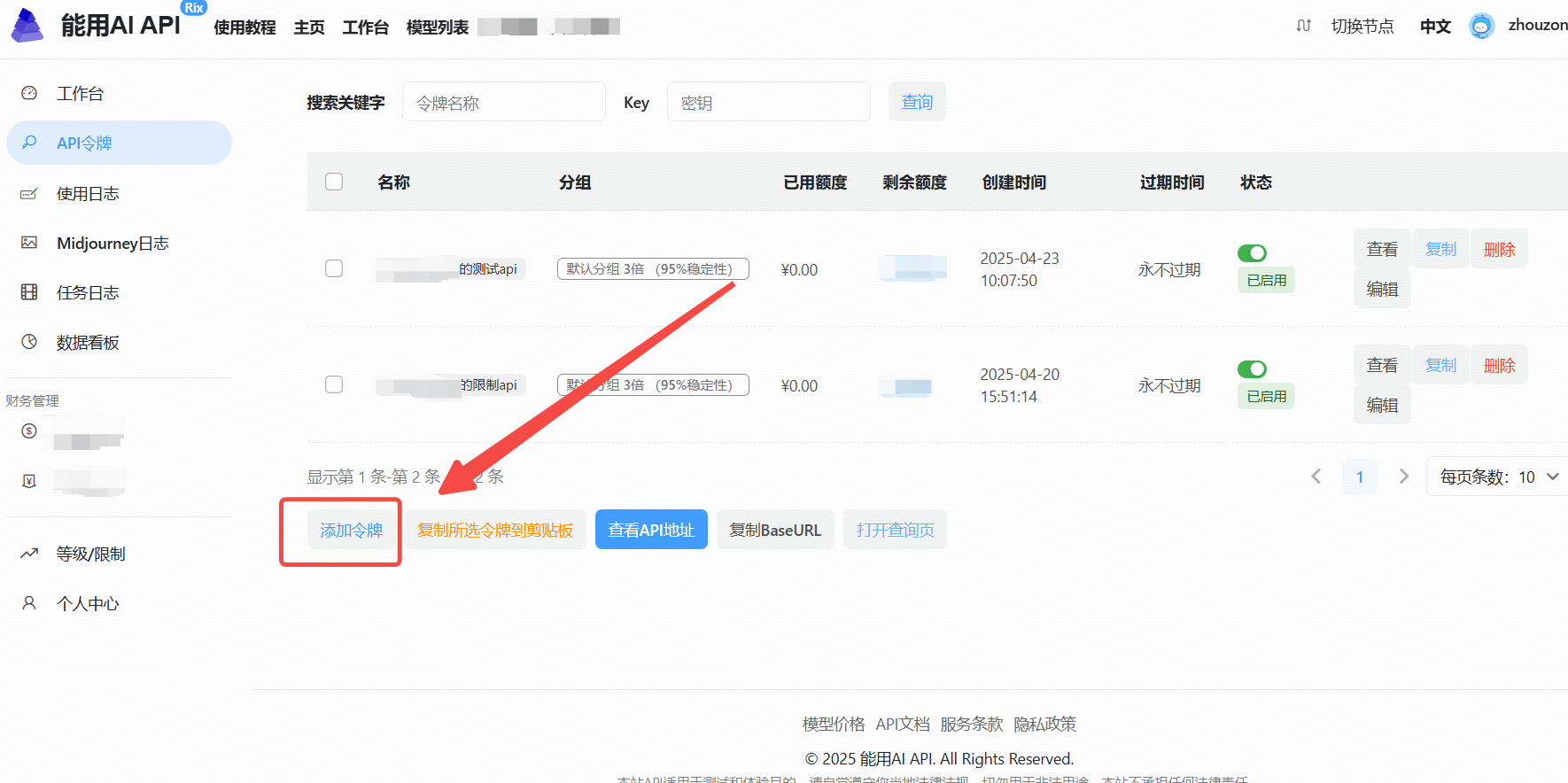
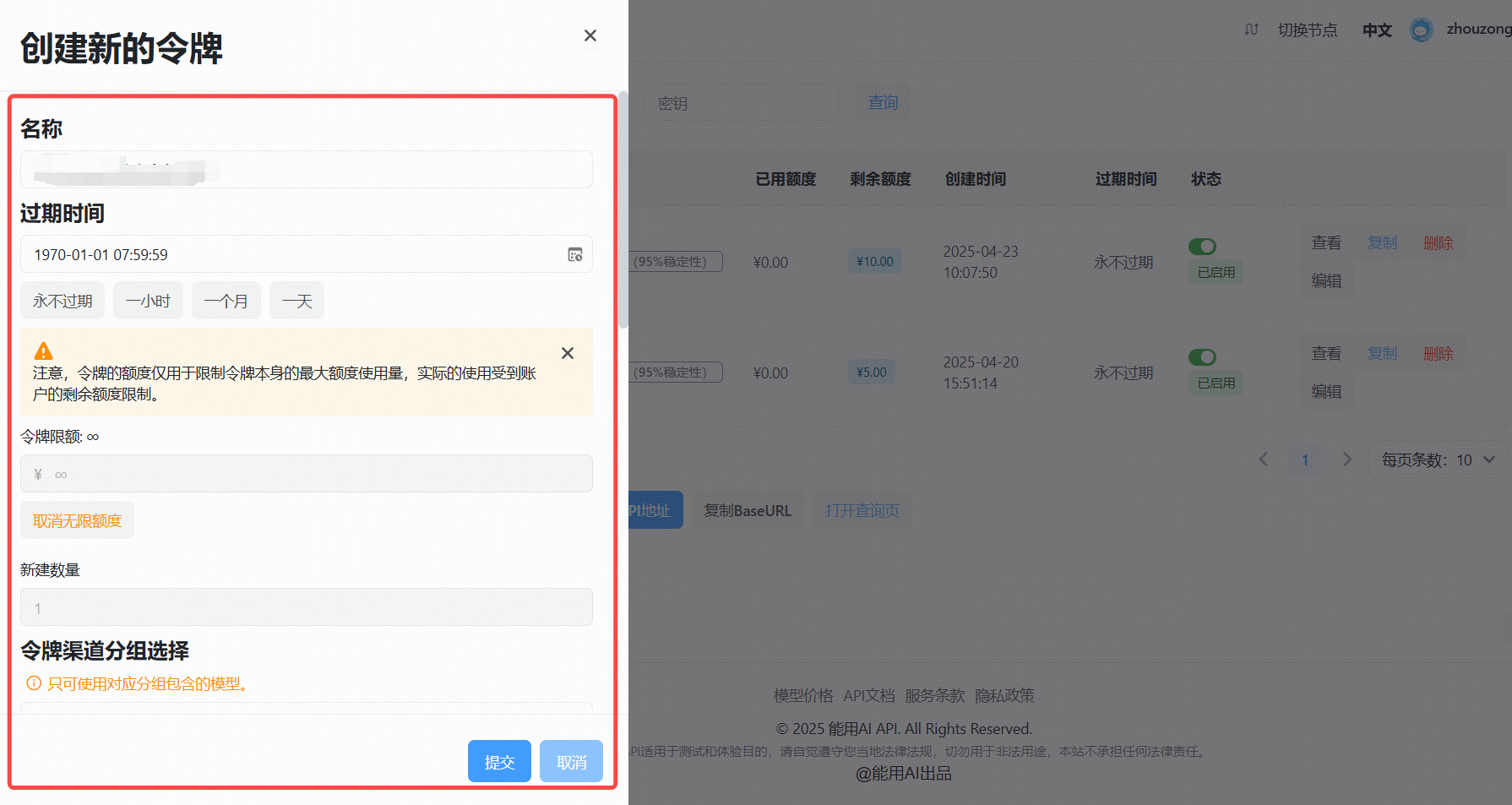
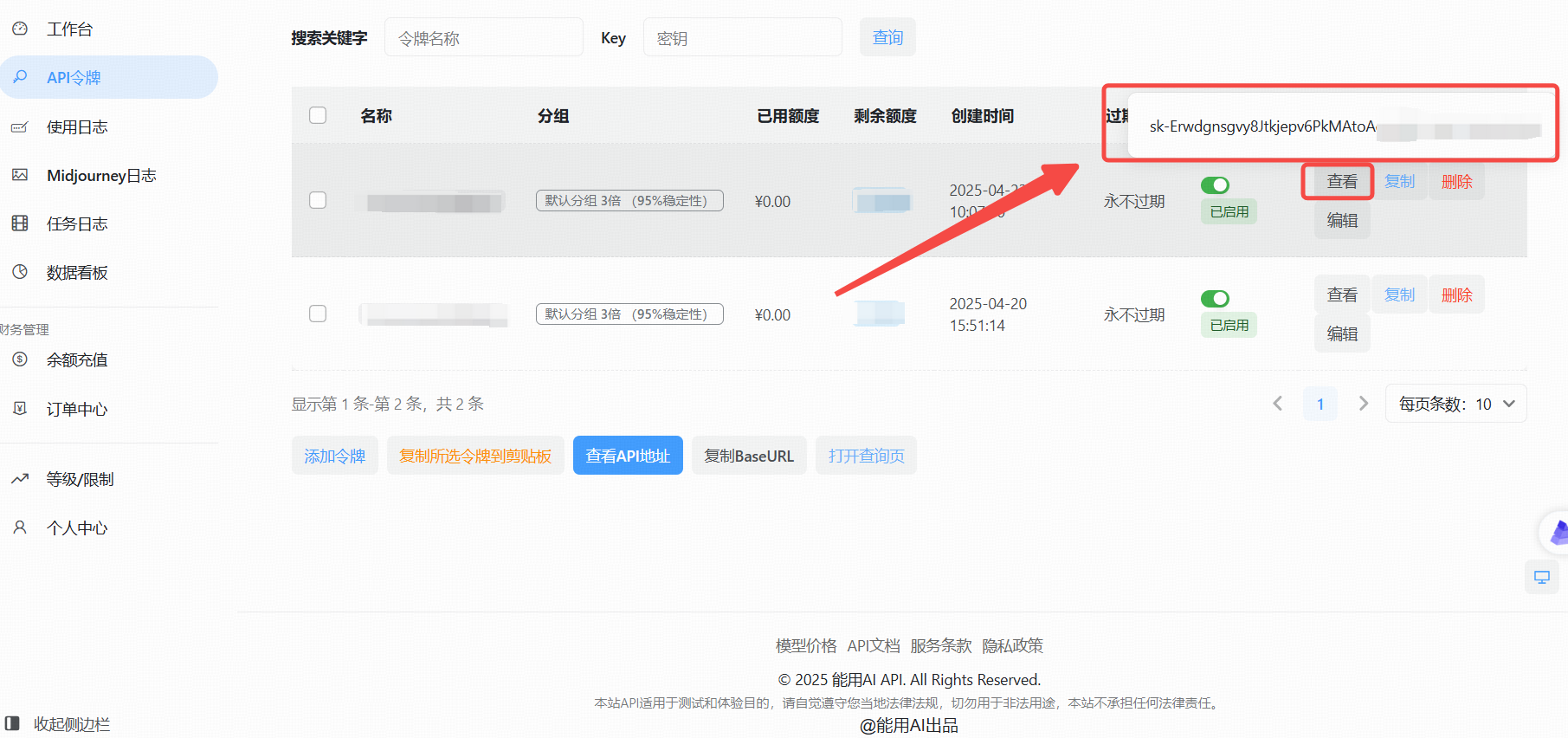
### 3. 生成新的 API Key
创建成功后点击“查看KEY”
### 4. 调用代码使用 能用AI API
```bash
# [调用API:具体模型大全](https://flowus.cn/codemoss/share/42cfc0d9-b571-465d-8fe2-18eb4b6bc852)
from openai import OpenAI
client = OpenAI(
api_key="这里是能用AI的api_key",
base_url="https://ai.nengyongai.cn/v1"
)
response = client.chat.completions.create(
messages=[
{'role': 'user', 'content': "鲁迅为什么打周树人?"},
],
model='gpt-4',
stream=True
)
for chunk in response:
print(chunk.choices[0].delta.content, end="", flush=True)
总结
通过以上步骤,你已经掌握了如何获取和使用 OpenAI API Key 的基本流程。无论你是开发者还是技术爱好者,掌握这些技能都将为你的项目增添无限可能!🌟

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 15
15 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)