瑞芯微(EASY EAI)RV1126B GPIO使用
gpiod库:需要使用上表的【Chip对象名】和【Line偏移量】。sysfs访问方式:需要使用上表的【GPIO系统节点路径】。在Linux 4.8开始,加入了libgpiod的支持,而原有基于sysfs的访问方式,将被逐步放弃。因此本文对应的demo主要采用了gpiod方式控制GPIO。gpiod库通过操作chip对象以及line对象,来达到控制GPIO引脚输出电平,或者读取GPIO引脚电平的目
1. GPIO简介
1.1 硬件接线原理图

注意:虽然GPIO可以热插拔,但在没给底板加装外壳保护的情况下,很容易触碰到底板上的器件,甚至板卡附近有金属零件很容易造成板卡短路。因此也建议在插拔外设时,最好确保电源已经完全切断。
GPIO的输入/输出电压为3.3V,注意电平匹配,否则会损坏芯片引脚或接入设备。
1.2 GPIO硬件资源分布介绍

gpiod库:需要使用上表的【Chip对象名】和【Line偏移量】。
sysfs访问方式:需要使用上表的【GPIO系统节点路径】。
1.3 gpiod 简介
在Linux 4.8开始,加入了libgpiod的支持,而原有基于sysfs的访问方式,将被逐步放弃。因此本文对应的demo主要采用了gpiod方式控制GPIO。gpiod库通过操作chip对象以及line对象,来达到控制GPIO引脚输出电平,或者读取GPIO引脚电平的目的。
Chip对象名:在调用gpiod_chip_open_by_name获取chip对象时,作为传入参数使用。
Line偏移量:在调用gpiod_chip_get_line获取line对象时,作为传入参数使用。
以GPIO5_C0为例,【引脚名称】【Chip对象名】【Line偏移量】三者之间的关系如下方公式所示。

1.4 sysfs访问方式简介
sysfs控制gpio的方式主要基于内核提供的gpio控制接口文件。也就是通过读写/sys/class/gpio目录下的文件来控制对应的gpio接口。
pin脚编号:sysfs访问方式均以pin脚编号作为操作依据。
GPIO系统节点路径:具体的GPIO引脚所对应的节点路径。
【引脚名称】【GPIO系统节点路径】两者之间的关系如下方公式所示。

引脚的导出申请:某一引脚在使用前,需要手动向gpio管理器申请导出该引脚资源。
echo 176 > /sys/class/gpio/export ## gpio_request 申请导出相应的gpio设置该引脚的工作模式:输入或者输出。
echo in > /sys/class/gpio/gpio176/direction ## gpio_direction_output 设置相应gpio为输入方向
## 或者
echo out > /sys/class/gpio/gpio176/direction ## gpio_direction_output 设置相应gpio为输出方向
根据引脚的工作模式,做相应的控制:写入电平或读取电平。
cat /sys/class/gpio/gpio176/value ## gpio_get_value 获取gpio当前状态值
## 或者
echo 0 > /sys/class/gpio/gpio176/value ## gpio_set_value 设置输出低电平
echo 1 > /sys/class/gpio/gpio176/value ## gpio_set_value 设置输出高电平
引脚的释放申请:引脚使用完毕后,需要手动向gpio管理器申请释放该引脚资源。
echo 176 > /sys/class/gpio/unexport ## gpio_free 释放申请的gpio2. 快速上手
2.1 开发环境准备
如果您初次阅读此文档,请阅读《入门指南/开发环境准备/Easy-Eai编译环境准备与更新》,并按照其相关的操作,进行编译环境的部署。
在PC端Ubuntu系统中执行run脚本,进入EASY-EAI编译环境,具体如下所示。
cd ~/develop_environment
./run.sh
2.2 源码下载以及例程编译
首先,在虚拟机后台终端,执行以下命令,创建外设单例源码管理目录:
cd /opt
mkdir -p EASY-EAI-Nano-TB/demo首先,到【百度网盘】上下载相关的单例程序:
链接:https://pan.baidu.com/s/1Br608Hiff2Xs65PzWO_qWQ?pwd=1234
提取码:1234
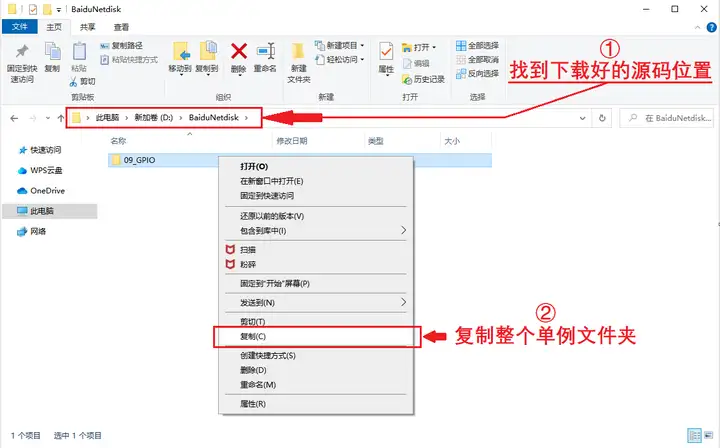
比如把单例程序下载到:此电脑\D:\BaiduNetdisk (无规定,用户可自主选择),如下图所示。

再将下载好的单例复制进入虚拟机的文件系统,过程如下图所示。


最后,进入到对应的例程目录执行编译操作,具体命令如下所示:
cd EASY-EAI-Nano-TB/demo/09_GPIO
./build.sh注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持/mnt挂载。

编译成功后,相关的demo会生成在Release目录下,并会自动部署到开发板的/userdata/目录中。
2.3 例程运行
通过串口调试或ssh调试,进入板卡后台,定位到例程部署的位置,如下所示:
cd /userdata
执行例程命令,如下所示。
sudo ./test-gpio执行效果如下所示。

再把【GPIO5_C0】和【GPIO5_C1】用导线短接起来,就能从【GPIO5_C1】引脚读到从【GPIO5_C0】输出的【高电平】,如下所示。

3. C语言使用案例
GPIO的C语言使用案例,代码地址为09_GPIO/test-gpio/main.c,供用户编码参考。以下代码展示了对GPIO操作流程:
#define ARRAY_SIZE(x) (sizeof(x) / sizeof((x)[0]))
static const GPIOCfg_t gpioCfg_tab[] = {
{
.pinName = "GPIO5_C0",
.direction = DIR_OUTPUT,
.val = 0,
}, {
.pinName = "GPIO5_C1",
.direction = DIR_INPUT,
.val = 0,
/*
}, {
.pinName = "GPIO5_C2",
.direction = DIR_OUTPUT,
.val = 0,
}, {
.pinName = "GPIO5_C6",
.direction = DIR_INPUT,
.val = 0,
*/
}
};
int main(int argc, char **argv)
{
gpio_init(gpioCfg_tab, ARRAY_SIZE(gpioCfg_tab));
pin_out_val("GPIO5_C0", 1);
// pin_out_val("GPIO5_C2", 0);
int val = read_pin_val("GPIO5_C1");
printf("GPIO5_C1 val : %d\n", val);
// val = read_pin_val("GPIO5_C6");
// printf("GPIO5_C6 val : %d\n", val);
return 0;
}其中gpio_init(),pin_out_val(),read_pin_val()是基于libgpiod的易用化封装。具体实现于09_GPIO/commonApi/gpio.c
若用户需要如demo一样地引用libgpiod,需要注意以下两点。
* 需要包含头文件:#include <gpiod.h>。
* 编译时,需要加上-lgpiod作为编译参数。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 30
30 0
0- 0



 已为社区贡献14条内容
已为社区贡献14条内容

所有评论(0)