三个专家一辆车,ExpertAD:为自动驾驶装上“专家大脑”,效率与安全双提升
ExpertAD 代表了一种正在兴起的新趋势——将Mixture-of-Experts理念引入自动驾驶,让系统具备“模块动态调度”和“注意力重构”的能力。相比一味堆叠参数,它主张用结构来解耦任务、用选择来提升效率。这不仅提升了性能,也为未来将更多知识融入系统提供了接口,比如未来结合世界模型(world models)或语言模型时,ExpertAD可能就是它们之间的调度中枢。在真实上路之前,我们也许
目录
Perception Adapter:自动加权最关键的语义线索
导读
我们为什么还没真正开上“全自动驾驶”的车?
不是因为感知看不清,也不是规划太蠢,而是在关键时刻——模型思路卡住了。
城市道路极为复杂,同一时间需要兼顾识别红绿灯、感知车辆动态、判断能否并线、预判行人意图、保持路线安全……这些任务层层叠叠,如果处理不当,就容易“干扰自己”,最终导致规划发散、决策迟缓甚至误判危险。
更麻烦的是,哪怕你塞进一个大模型,也不一定真能解决这些问题——推理慢、反应迟,可能还不如老司机一秒做出的直觉判断来得靠谱。
那有没有可能,让模型“分工合作”,只激活当下最相关的技能?复旦大学团队提出了一个有趣的方法:ExpertAD,一个基于“专家混合体”(Mixture of Experts, MoE)的自动驾驶新框架。它通过“语义增强+专家调度”双重机制,让每次决策都更专注、更快速、更可靠。
01 多专家分工合作:一个会挑活儿的自动驾驶大脑
当下的自动驾驶系统越来越趋向“端到端”,也就是把摄像头输入直接映射为驾驶轨迹。但这类模型常常面临两难:
● 模块融合后更高效,但容易混乱(多个任务互相干扰);
● 模块分开则更清晰,但速度慢、信息断层。
ExpertAD 选择了一条中间路线:保留原有的整体框架,只改造其中的“感知”和“预测”两个模块。
感知模块:Perception Adapter
这个模块会自动“加权”,突出对当前任务最重要的特征,比如遇到路口时更关注地图语义,遇到人群时更关注动态物体。这就像老司机在高速时自动屏蔽远处广告,只盯着并线车辆。
预测模块:“MoSE”专家调度器
系统内建了8个稀疏专家,分别处理车速、导航、障碍物等任务,每次决策时只挑最合适的几个激活,从而避免互相干扰、加快推理速度——比起让所有专家“群体吵架”,这更像“定向请教三位老司机顾问”。
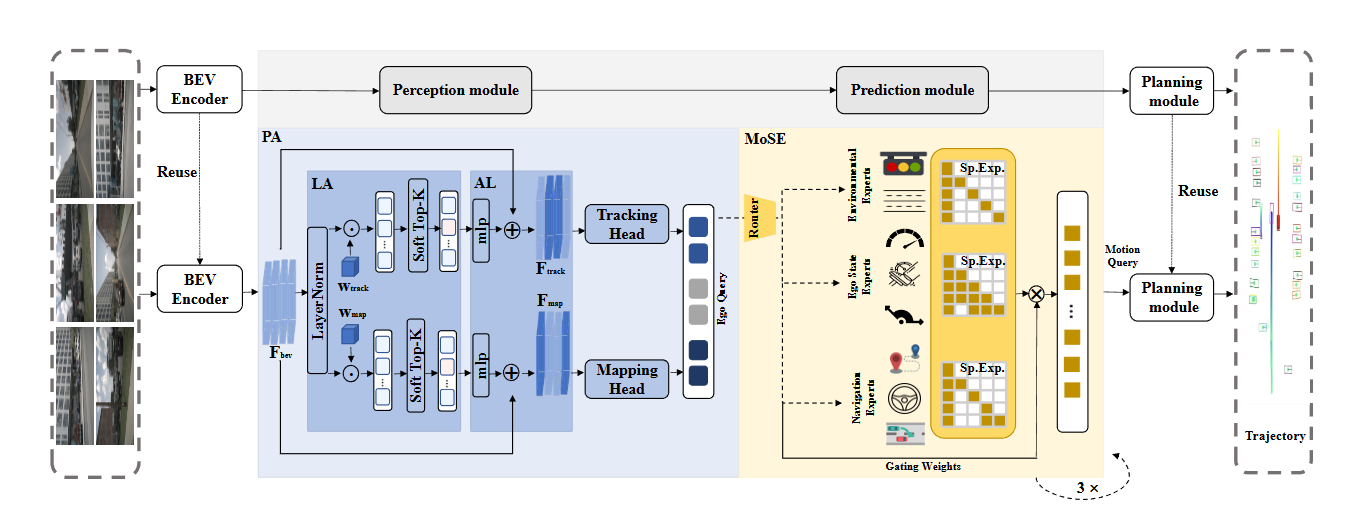
图1|ExpertAD 系统架构概览:ExpertAD 在保留原有自动驾驶系统主体结构的基础上,重构感知与预测模块。感知部分引入“任务适配器 PA”,聚焦关键语义;预测部分采用“稀疏专家混合体 MoSE”,智能调度子任务,减少干扰并提升规划质量
02 技术亮点
Perception Adapter:自动加权最关键的语义线索
每个任务(如 tracking、mapping)关注点不同,感知模块需要“动态调整注意力”;PA 模块使用 Learnable Adapter 学习每个任务下应重点关注的语义维度,并通过 Alignment Layer 对特征进行非线性增强;实验表明,调整后的感知特征能显著提升下游预测与规划的准确性,尤其在多目标追踪中提升明显。
MoSE 稀疏专家机制:让专家各司其职
专家被划分为三类:环境感知专家、车辆状态专家、导航规划专家;每个专家都采用定制化的稀疏注意力机制,更高效、更稳定;路由器模块根据当前 ego query 自动决定激活哪几个专家,不再一股脑调所有模块,避免推理冲突。
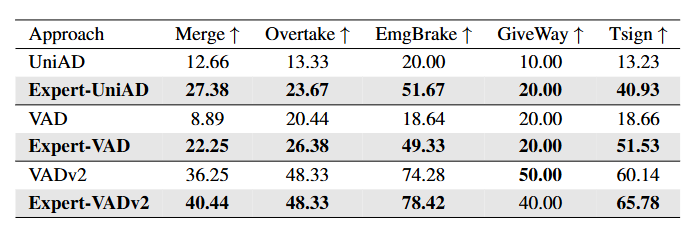
图2|MoSEs带来的在特殊驾驶技能场景下的表现:在并线、超车、识别交通标志等复杂场景中,ExpertAD 显著提升了成功率;而在紧急制动和避让等安全性场景中,也保持了稳定表现,展现出强大的多任务适应能力
超低延迟 + 多任务表现更强
与原始 UniAD/VAD/VADv2 相比,ExpertAD 在不大幅增加模型参数的前提下,实现:
● 碰撞率降低
● 轨迹误差下降
● 推理延迟减少
在 Bench2Drive 稀有场景(如并线、红绿灯识别、事故避让)中表现明显提升,是应对复杂真实场景的关键能力。
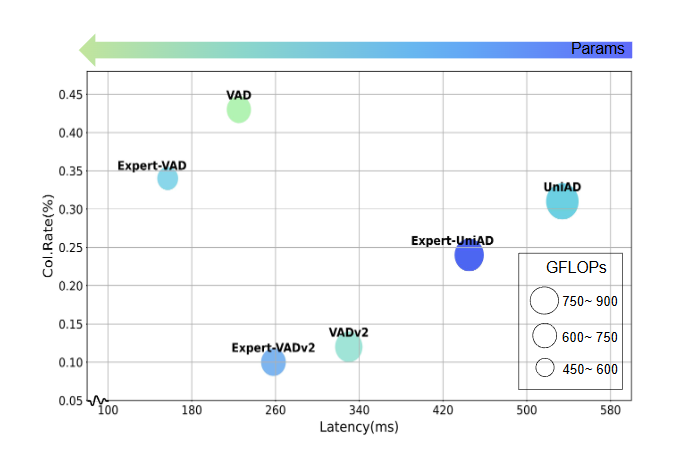
图3|不同模型的碰撞率与推理延迟对比:在不牺牲速度的前提下,ExpertAD 显著提升了规划效果:不仅碰撞率最低,还将推理延迟控制在更优水平。横轴为平均推理时间,纵轴为碰撞率,越靠左下越优秀
03 实验与表现
论文进行了包括 open-loop、closed-loop、跨城市泛化等多项评估,最终实验表现如下:
● 综合性能提升:在保证速度的同时提升规划效果,并降低推理延迟;
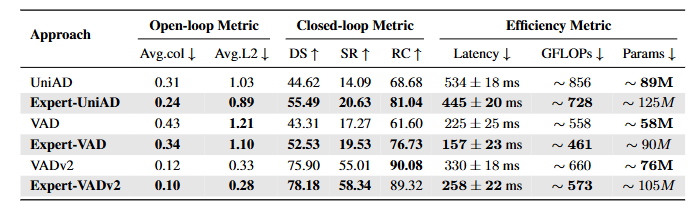
图4|不同模型的碰撞率与推理延迟对比:在不牺牲速度的前提下,ExpertAD 显著提升了规划效果:不仅碰撞率最低,还将推理延迟控制在更优水平。横轴为平均推理时间,纵轴为碰撞率,越靠左下越优秀
● 碰撞率下降:在新加坡和波士顿的泛化测试中,ExpertAD 都比原模型碰撞率更低;
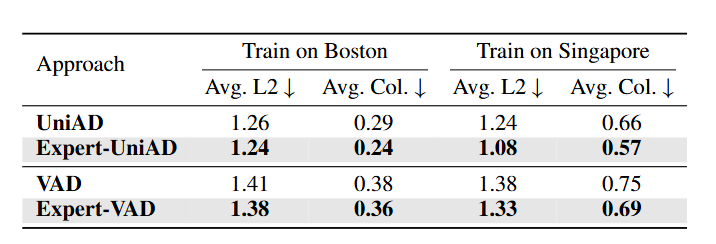
图5|ExpertAD在不同城市下的泛化结果
● 复杂场景恢复能力强:下图展示了一例 UniAD 决策失误(未识别交警)导致偏航,而 ExpertAD 成功调整路径,避开了潜在危险。
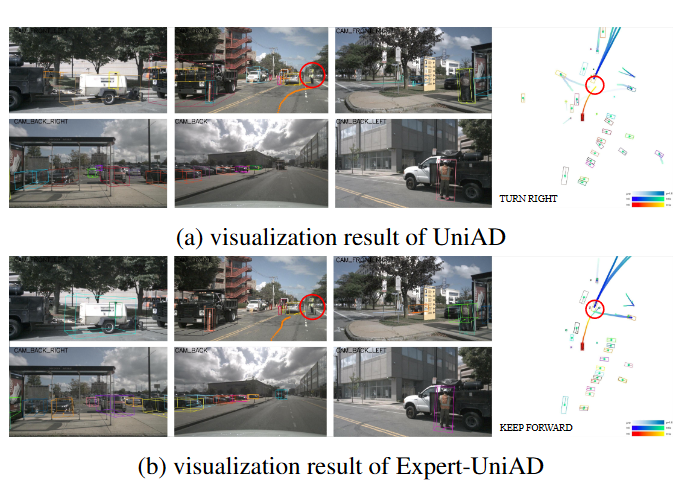
图6|左图:原始 UniAD 未能识别交警,车辆偏航进入危险区域;右图:ExpertAD 成功识别并及时调整轨迹,安全完成变道。该案例展示了 ExpertAD 在高风险场景中的感知敏锐度与快速响应能力
04 总结
ExpertAD 代表了一种正在兴起的新趋势——将Mixture-of-Experts理念引入自动驾驶,让系统具备“模块动态调度”和“注意力重构”的能力。
相比一味堆叠参数,它主张用结构来解耦任务、用选择来提升效率。这不仅提升了性能,也为未来将更多知识融入系统提供了接口,比如未来结合世界模型(world models)或语言模型时,ExpertAD可能就是它们之间的调度中枢。
在真实上路之前,我们也许更需要一套“会挑活、会协调”的决策大脑,而不是盲目相信“越大越好”。
论文出处:AAAI2025
论文标题:ExpertAD: Enhancing Autonomous Driving Systems with Mixture of Experts
论文作者:Haowen Jiang, Xinyu Huang, You Lu, Dingji Wang, Yuheng Cao, Chaofeng Sha, Bihuan Chen,Keyu Chen, Xin Peng
论文链接:https://arxiv.org/pdf/2511.11740

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 22
22 0
0- 0



 已为社区贡献68条内容
已为社区贡献68条内容

所有评论(0)