无人船编队 无人车编队 MPC 模型预测控制 多智能体协同控制 一致性 MATLAB 无人车 USV
理论严谨:严格遵循“路径跟踪+多智能体协同”双层架构,确保稳定性与收敛性;工程实用:显式处理输入约束、通信延迟,事件触发机制适用于低带宽场景;可视化完善:提供3D动画与专业结果图,方便算法验证与论文撰写;扩展性强:支持多种智能体类型、编队形式与通信拓扑,可快速适配不同应用场景。代码可直接用于无人船、无人车等多智能体编队控制的仿真验证,也可作为实际系统开发的基础框架。
·
无人船编队 无人车编队 MPC 模型预测控制 多智能体协同控制 一致性 MATLAB 无人车 USV 带原文献
一、代码整体架构与核心目标
1. 核心目标
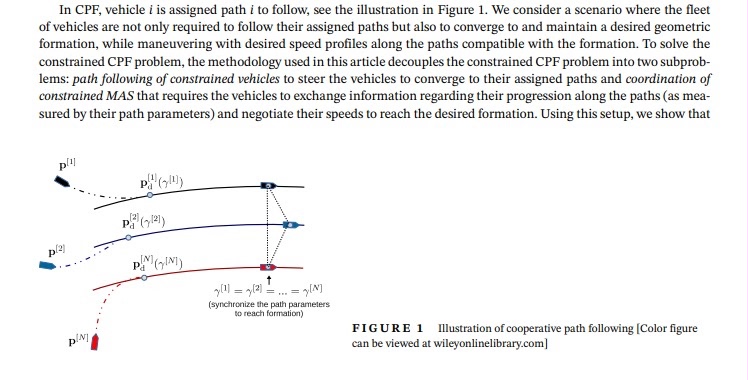
本套MATLAB源码针对多智能体协同路径跟踪(Cooperative Path Following, CPF) 问题,实现了受输入约束(如速度、航向率限制)的无人船(USV)、无人车等智能体编队控制。核心目标是让多智能体沿预设空间路径行驶,同时保持指定几何编队(三角形、圆形等),并通过事件触发通信(Event-Triggered Communication, ETC)机制减少数据传输量,提升通信效率。
2. 整体架构
代码采用双层控制结构,完全遵循参考文献中“路径跟踪解耦+多智能体协同”的设计思路,架构如下:
上层:多智能体协同层(协调路径参数,维持编队)
- 核心功能:通过分布式一致性控制同步各智能体路径参数,基于事件触发机制实现按需通信
- 关键模块:一致性控制器、事件触发判断、通信延迟补偿
下层:单智能体路径跟踪层(跟踪个体路径,满足约束)
- 核心功能:基于模型预测控制(MPC)实现输入约束下的精准路径跟踪
- 关键模块:MPC优化器、路径跟踪误差计算、Lyapunov稳定性约束
支撑模块:
- 可视化模块:智能体3D建模、轨迹动画、数据绘图
- 工具模块:RK4数值积分、变量存储、通信拓扑定义二、核心文件功能解析
代码包包含7个核心文件,按功能可分为“主控制文件”“可视化文件”“工具文件”三类,具体功能如下:
(一)主控制文件(核心逻辑实现)
1. `MPC_CPF_5V_Circular.m`:圆形编队主控制程序
- 功能定位:实现5个智能体的圆形编队协同路径跟踪,对应参考文献中“嵌套圆周路径”场景。
- 核心流程:
1. 初始化配置: - 智能体状态:初始位置(如车辆1初始位置[20;0])、航向角(如psi1_0=pi/4);
- 路径参数:5个同心圆路径半径(30m、33m、36m、39m、42m),路径参数γ初始值;
- 约束条件:速度范围[0.2, 2]m/s,航向率范围[-0.2, 0.2]rad/s;
- 通信参数:事件触发阈值η=0.1e^(-0.2t)+5e-3,通信延迟Δ=2s。
2. 协同层计算: - 路径跟踪误差:通过
epf()函数计算惯性系到平行传输帧的位置误差(ex, ey)和航向误差(e_psi); - 事件触发判断:当路径参数估计误差|γ̃|>η时,触发通信并广播当前γ值;
- 一致性控制:通过分布式控制律
uci = -kctanh(l(γi - 邻居γ估计值))计算速度修正量,实现路径参数同步。
3. MPC路径跟踪: - 构建MPC优化问题:预测时域Np=10,采样时间Ts=0.2s,目标函数包含误差项和控制输入惩罚;
- 约束处理:显式考虑速度、航向率输入约束,通过Lyapunov稳定性约束保证闭环稳定性;
- 求解优化:调用CasADi工具包求解有限时域最优控制问题,输出控制量(航向率r、路径参数更新率u_gamma)。
4. 状态更新: - 智能体状态:通过
update_vehicle()函数更新位置和航向; - 路径状态:通过
update_gamma()函数更新路径参数γ; - 估计器更新:通过
update_gammahat()函数更新邻居路径参数估计值。
2. `MPC_CPF_5V_Triangular.m`:三角形编队主控制程序
- 功能定位:实现5个智能体的三角形编队协同路径跟踪,对应参考文献中“平行直线路径”场景。
- 核心差异:
- 路径参数:平行直线路径定义为
pd = [a*(γ-c); d],其中a=50m(路径长度系数),c为路径偏移系数(如c1=0, c2=-0.1),d为横向距离(如d1=-10m, d2=-5m); - 仿真参数:仿真时长T=81s(短于圆形编队的201s),初始位置分布在不同横向距离上,确保形成三角形编队。
3. `mpcController.m`:MPC控制器构建函数
- 功能定位:为每个智能体生成独立的MPC控制器,是下层路径跟踪的核心模块。
- 关键实现:
1. 状态与输入定义: - 状态向量x = [s1, y1, psie, gamma, uc](s1/y1为路径跟踪误差,psie为航向误差,gamma为路径参数,uc为协同层速度修正量);
- 控制输入u = [r, ugamma](r为航向率,ugamma为路径参数更新率)。
2. 动力学模型:基于参考文献中的路径跟踪误差动力学方程,考虑路径曲率κ和速度耦合项,公式如下:matlab
xdot = [(vd+uc)hgicos(psie)-hgiug(1-cgiy1); % 沿路径误差动力学
(vd+uc)hgisin(psie)-cgis1hgiug; % 横向误差动力学
r-cgihgiug; % 航向误差动力学
ug; % 路径参数更新
0]; % 速度修正量不变
其中hgi为路径长度系数,cgi为路径曲率相关系数,vd为期望速度。
3. 优化目标:二次型目标函数,权衡误差最小化和控制输入平滑性:matlab
Q=diag([1 1 2 2 20]); % 误差权重(航向误差权重最高)
L = [s1, y1, psie, (vd+uc)cos(psie)-ug, r-cgihgiug]Q*[...]
4. 稳定性约束:引入Lyapunov函数导数约束dVmpc ≤ dVnon,确保闭环系统全局渐近稳定(GAS),避免终端集设计,扩大吸引域。
(二)可视化文件(结果展示与动画)
1. `GTF_Simulink_PlotAUV.m`:智能体3D建模与绘制
- 功能定位:生成鱼雷型智能体(AUV/USV/无人车)的3D模型,支持位置、姿态、缩放比例配置。
- 核心组件:
- 机身:通过球体(nose/tailcap)和圆柱体(cyl1)组合,支持自定义颜色;
- 尾翼与螺旋桨: fins(水平尾翼)、rudders(垂直尾翼)、prop(螺旋桨,支持旋转动画);
- 坐标变换:先旋转(X/Y/Z轴)、再缩放、最后平移,确保姿态与运动一致。
2. `animation_5vehicles_LMH.m`:编队动画生成
- 功能定位:基于
GTFSimulinkPlotAUV.m绘制5个智能体的实时运动动画,支持视频录制。 - 关键特性:
- 颜色区分:5个智能体分别使用黑、蓝、红、青、紫5种颜色,与路径颜色一一对应;
- 姿态同步:实时更新智能体航向角(yaw1_1=90-yaw1),确保动画与实际运动一致;
- 播放控制:支持暂停、帧间隔调整,可通过
vid=1启用视频录制。
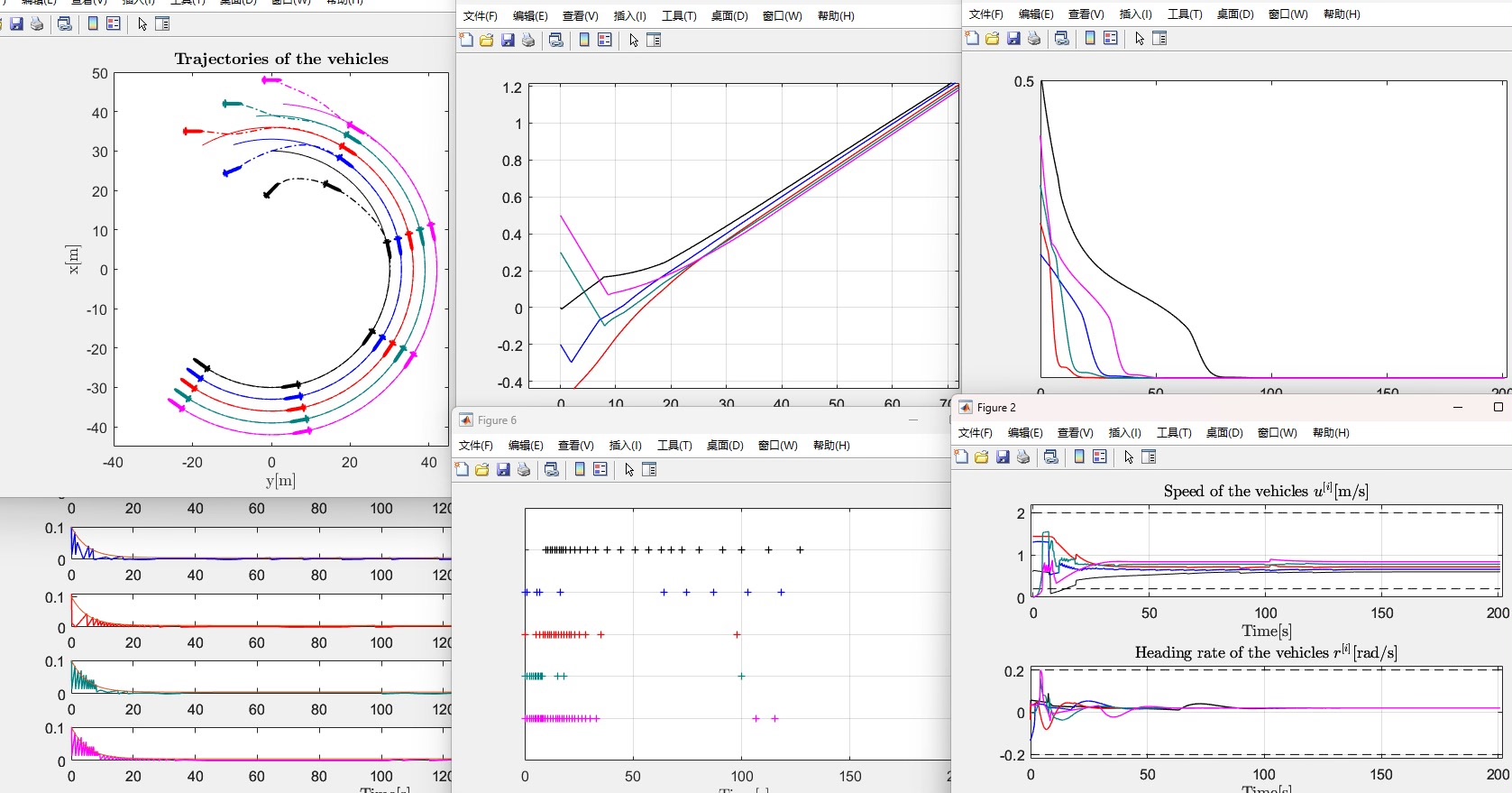
3. `plotjournal_5vehicle.m`:仿真结果绘图
- 功能定位:生成参考文献风格的仿真结果图,用于验证算法性能。
- 绘图类型:
- 轨迹图:对比智能体实际轨迹(虚线)与期望路径(实线);
- 输入约束图:绘制速度、航向率随时间变化,标注约束边界(黑色虚线);
- 路径参数同步图:展示5个智能体γ参数收敛过程(一致性验证);
- 事件触发图:标记各智能体通信触发时刻(+号);
- 估计误差图:对比路径参数估计误差与触发阈值η;
- Lyapunov函数图:展示V_mpc单调递减,验证稳定性。
(三)工具文件(辅助功能支持)
1. `RK4_integrator.m`:RK4数值积分工具
- 功能定位:为智能体动力学模型提供四阶龙格-库塔(RK4)数值积分,确保状态更新精度。
- 核心接口:输入微分方程函数
ode_fun、初始状态x0、控制输入u0、采样时间Ts,输出积分后的状态xEnd,支持灵敏度计算(可选)。
2. `save_to_base.m`:变量存储工具
- 功能定位:将主程序中的内部变量(如轨迹、误差、控制输入)保存到MATLAB基础工作区,方便后续分析。
- 特性:支持选择是否覆盖已有变量,自动排除
ans等临时变量。
三、关键技术细节解析
1. 事件触发通信(ETC)机制
- 核心思想:仅当“路径参数估计误差超过阈值”时才进行通信,避免连续通信造成的带宽浪费。
- 触发条件:
|γ̃i(t)| = |γ̂i(t) - γi(t)| > ηi(t),其中η_i(t)=c1e^(-αt)+ε0(指数衰减阈值,兼顾收敛性与通信频率)。 - 延迟补偿:考虑2s通信延迟,接收端通过
Gammahat21(end) = Data1D(2,idx1)+vd*Delta补偿延迟造成的估计偏差。 - 优势:仿真初期误差大时通信频繁,编队稳定后误差趋近于零,通信次数显著减少(参考文献图9B验证)。
2. 多智能体一致性控制
- 通信拓扑:采用无向连通图, Laplacian矩阵定义如下(5个智能体链式拓扑):
matlab
L = [1 -1 0 0 0;
-1 2 -1 0 0;
0 -1 2 -1 0;
0 0 -1 2 -1;
0 0 0 -1 1]; - 一致性控制律:基于双曲正切函数(tanh)设计饱和控制输入,避免速度修正量超出约束:
matlab
uci = -kctanh(l(γi - sum(邻居γ估计值)))
其中l为增益系数,kc满足0u/gmax(cu为速度调整余量,gmax为路径长度系数最大值)。
3. MPC约束处理
- 输入约束:明确限制速度
u∈[0.2,2]m/s、航向率r∈[-0.2,0.2]rad/s、路径参数更新率u_gamma∈[-0.05,0.05]; - 稳定性约束:通过
dVmpc ≤ dVnon确保MPC控制律的稳定性,其中dV_non为Lyapunov函数的负定导数(由非线性控制器推导); - 递归可行性:将非线性稳定控制器的输出作为MPC的可行解,确保优化问题始终有解。
4. 路径跟踪误差模型
- 坐标系转换:采用平行传输帧(Parallel Transport Frame),将惯性系位置误差转换为沿路径(ex)和横向(ey)误差,简化动力学建模;
- 误差动力学:考虑路径曲率κ(γ)对误差的影响,适用于任意平滑路径(直线、圆、椭圆等),突破弧长参数化限制。
四、仿真复现步骤
1. 环境准备
- 软件要求:MATLAB R2018b及以上;
- 依赖工具包:CasADi(非线性优化求解)、Robotics Toolbox(可选,用于坐标系转换验证);
- 安装步骤:
1. 下载CasADi工具包(https://web.casadi.org/),添加路径到MATLAB:addpath('casadiinstalldir');
2. 将所有代码文件放在同一目录,运行savetobase.m初始化变量存储功能。
2. 复现步骤
步骤1:选择编队类型
- 圆形编队:运行
MPCCPF5V_Circular.m; - 三角形编队:运行
MPCCPF5V_Triangular.m。
步骤2:参数调整(可选)
- 编队参数:修改路径参数(如圆形编队半径、三角形编队横向距离);
- 控制参数:调整MPC预测时域Np、权重矩阵Q、事件触发阈值η;
- 约束参数:修改速度/航向率约束(
vehicle.rmax、vehicle.rmin)。
步骤3:查看结果
- 动画展示:运行
animation5vehiclesLMH.m,查看智能体编队运动过程; - 数据绘图:运行
plotjournal_5vehicle.m,生成轨迹、误差、通信触发等结果图; - 变量分析:基础工作区中可查看
xvehicle1~5(智能体状态)、epf1~5(路径跟踪误差)、uc(一致性控制输入)等变量。
3. 预期结果
- 轨迹收敛:智能体在50~100s内收敛到期望路径,保持指定编队;
- 约束满足:速度、航向率始终在设定范围内;
- 通信优化:编队稳定后,通信触发次数趋近于零;
- 稳定性验证:Lyapunov函数V_mpc单调递减至零。
五、代码扩展性说明
1. 智能体类型扩展
- 无人车:修改
vehicle.m中的动力学模型,替换为无人车运动学模型(如差速驱动); - 无人机(UAV):添加高度维度(z轴),修改
GTFSimulinkPlotAUV.m中的3D模型,适配无人机外形。
2. 编队类型扩展
- 自定义编队:修改路径参数生成函数
path.m,定义新的期望路径(如矩形、菱形); - 时变编队:在
uc计算中引入时间依赖项,实现编队形状动态变化。
3. 通信拓扑扩展
- 切换拓扑:修改Laplacian矩阵
L,支持星形、全连通等拓扑; - 时变拓扑:在主程序中动态更新
L,模拟通信链路切换。
六、关键问题排查
1. 仿真报错:CasADi未找到
- 解决方案:确认CasADi路径添加正确,或重新下载对应MATLAB版本的CasADi。
2. 优化问题无解
- 原因:输入约束过紧或MPC权重设置不合理;
- 解决方案:放宽速度/航向率约束,调整Q矩阵中误差权重,或增大预测时域Np。
3. 编队无法收敛
- 原因:一致性增益kc过小,或事件触发阈值η过大;
- 解决方案:增大kc(不超过
cu/gmax),减小η的初始值c1。
4. 动画无法显示
- 原因:MATLAB图形渲染设置问题;
- 解决方案:运行
opengl info检查渲染支持,或修改GTFSimulinkPlotAUV.m中的renderpatch函数为renderwire(线框模式)。
七、总结
本套代码完整复现了参考文献中“基于MPC与事件触发通信的约束多智能体协同路径跟踪”算法,具有以下特点:
- 理论严谨:严格遵循“路径跟踪+多智能体协同”双层架构,确保稳定性与收敛性;
- 工程实用:显式处理输入约束、通信延迟,事件触发机制适用于低带宽场景;
- 可视化完善:提供3D动画与专业结果图,方便算法验证与论文撰写;
- 扩展性强:支持多种智能体类型、编队形式与通信拓扑,可快速适配不同应用场景。
代码可直接用于无人船、无人车等多智能体编队控制的仿真验证,也可作为实际系统开发的基础框架。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 22
22 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)