【计算机图形学】多视几何005:单目测量 mearning height without a ruler
auditor 23:26:08https://blog.csdn.net/qq_29710939/article/details/117770982auditor 23:26:26https://mi.mbd.baidu.com/r/upEsNkfKne?f=cp&u=0217dc949140d2adauditor 23:26:45https://blog.csdn.net/u01058
单目测量利用投影变换的两个性质: 1. 不保持 l ∞ ( 用于在图中通过平行线找出一条无穷远线,一般为视平线 ) 2. 保持交比(引入一无穷远点,通过图上的交比推断世界的交比) 单目测量利用投影变换的两个性质:\\ 1.不保持l_\infty (用于在图中通过平行线找出一条无穷远线,一般为视平线)\\ 2.保持交比(引入一无穷远点,通过图上的交比推断世界的交比) 单目测量利用投影变换的两个性质:1.不保持l∞(用于在图中通过平行线找出一条无穷远线,一般为视平线)2.保持交比(引入一无穷远点,通过图上的交比推断世界的交比)
投影变换中有8个自由度的(Dof最大)的投影变换,只保持交叉比不变。(如果在三维空间中的一条直线上有四个点,那么它们映射到图片上的四个点后,这四个点的交比不变。)


通过图中的平行线获得“无穷远”点 o ,连接无穷远点与第一个柱子顶点 p , 各个柱子顶点正好落在线 o p 上 , 每个柱子长都为地面与点 p 的距离高度。 通过图中的平行线获得“无穷远”点o,连接无穷远点与第一个柱子顶点p,\\ 各个柱子顶点正好落在线op上,每个柱子长都为地面与点p的距离高度。\ \ \ \\ 通过图中的平行线获得“无穷远”点o,连接无穷远点与第一个柱子顶点p,各个柱子顶点正好落在线op上,每个柱子长都为地面与点p的距离高度。
画出地平线 , 图中的紫色线 画出地平线,图中的紫色线 画出地平线,图中的紫色线, 延长 a b ,交地平线于点 c 延长ab,交地平线于点c 延长ab,交地平线于点c

到此,获得平行线 a b , c e , 所以现实世界中蓝线与 a e 等长 引入标号 f ,红线长为 a f 为了体现交叉比的关系,还需引入第四个点 g , 其为红蓝两线的无穷远点 到此,获得平行线ab,ce,所以现实世界中蓝线与ae等长\\ 引入标号f,红线长为af\\ 为了体现交叉比的关系,还需引入第四个点g,其为红蓝两线的无穷远点 到此,获得平行线ab,ce,所以现实世界中蓝线与ae等长引入标号f,红线长为af为了体现交叉比的关系,还需引入第四个点g,其为红蓝两线的无穷远点
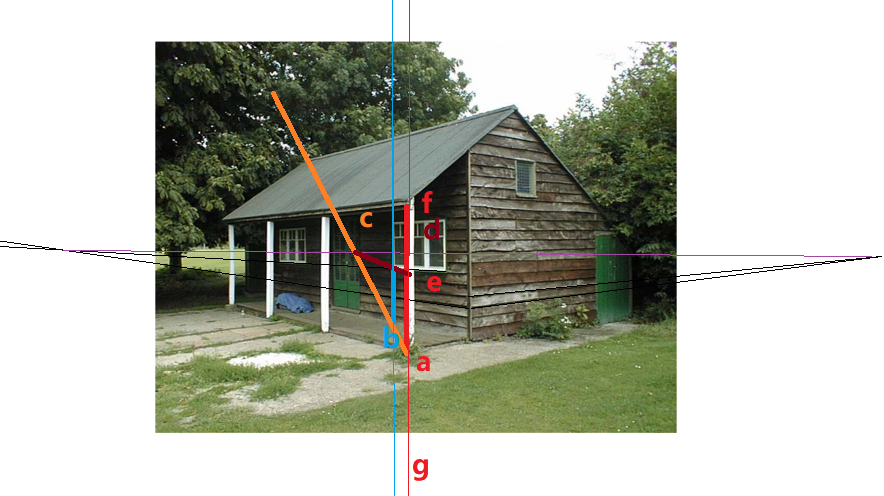
A E / A F G E / G F ( 3 D 现实世界的交叉比) = a e / a f g e / g f ( 2 D 图像,可用尺测量的) G E / G F = 1 , 且在图像中,红蓝两线仍较为平行, g e / g f = 1 测得 a e 长为( 370 − 290 = 80 ) p x , a f 长为( 370 − 210 = 160 ) p x , 则柱长为 2 米 \frac{AE/AF}{GE/GF}(3D现实世界的交叉比)=\frac{ae/af}{ge/gf}(2D图像,可用尺测量的)\\ GE/GF=1,且在图像中,红蓝两线仍较为平行,ge/gf=1\\ 测得ae长为(370-290=80)px,af长为(370-210=160)px,\\ 则柱长为2米 GE/GFAE/AF(3D现实世界的交叉比)=ge/gfae/af(2D图像,可用尺测量的)GE/GF=1,且在图像中,红蓝两线仍较为平行,ge/gf=1测得ae长为(370−290=80)px,af长为(370−210=160)px,则柱长为2米
相关拓展
一张图像无法测出具体长度,只能测出相对比例。
[1] Criminisi A, Reid I, Zisserman A. Single view metrology[J]. International Journal of Computer Vision, 2000, 40(2): 123-148.
单目视觉测距

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 0
0 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)