Modeling and Analysis of OFDM-Based 5G/6G Localization Under Hardware Impairments
摘要——定位被设想为满足第五代 / 第六代( 5G/6G5\text{G}/6\text{G}5G/6G )通信系统中通信和情境感知服务需求的关键使能技术。用户定位可以通过利用上行 / 下行导频信号进行时延和角度估计来实现。然而,硬件损伤( HWIs\text{HWIs}HWIs )(如相位噪声和互耦)会使得发射机和接收机两端的信号发生畸变,从而影响定位性能。虽然在硬件损伤较轻且定位要求较宽松的较
摘要——定位被设想为满足第五代 / 第六代( 5 G / 6 G 5\text{G}/6\text{G} 5G/6G )通信系统中通信和情境感知服务需求的关键使能技术。用户定位可以通过利用上行 / 下行导频信号进行时延和角度估计来实现。然而,硬件损伤( HWIs \text{HWIs} HWIs )(如相位噪声和互耦)会使得发射机和接收机两端的信号发生畸变,从而影响定位性能。
虽然在硬件损伤较轻且定位要求较宽松的较低频段下,这种影响可以忽略不计,但在高频段,需要进行建模和分析工作,以评估硬件损伤导致的定位精度下降。在这项工作中,我们为毫米波多输入多输出通信系统中的各种类型的损伤建模,并进行了失配克拉美-罗界分析,以评估硬件损伤在角度 / 时延估计以及由此产生的 3 D 3\text{D} 3D 位置 / 方向估计误差方面导致的性能损失。
我们还从符号错误率( SER \text{SER} SER )的角度研究了单个和整体硬件损伤对通信的影响。我们大量的仿真结果表明,每种类型的硬件损伤都会导致不同程度的角度和时延估计性能下降,且那些对时延估计造成最显著损害的硬件损伤因素,也将是对误符号率(SER)产生主导性负面影响的因素。
索引词——定位, 5 G / 6 G 5\text{G}/6\text{G} 5G/6G ,硬件损伤,毫米波 MIMO \text{MIMO} MIMO , CRB \text{CRB} CRB , MCRB \text{MCRB} MCRB 。
文章目录
I. INTRODUCTION
定位是指估计用户设备( UE \text{UE} UE )的位置(可能还包括方向)的过程,预计在未来的无线系统中,该过程将与通信产生紧密的交互 [1]。更具体地说,定位可以受益于通信基础设施提供的高频信号(例如,毫米波和亚太赫兹)的大阵列维度和宽带宽 [2]。反过来,位置和方向信息可以提高空间效率,并优化通信的资源分配 [3]。因此,未来的无线网络将支持高精度的情境感知应用,如触觉互联网、增强现实和智慧城市 [4], [5]。
在全球导航卫星系统( GNSSs \text{GNSSs} GNSSs )和传统蜂窝网络中,基于测距的算法(例如三边测量)通常被用于位置估计。当转向更高的载波频率时,由于波长更短,单个阵列中可以集成更多的天线。因此,除了时延估计之外,还可以利用到达角( AOA \text{AOA} AOA )和离开角( AOD \text{AOD} AOD )信息进行定位;并且最近在第五 / 六代( 5 G / 6 G 5\text{G}/6\text{G} 5G/6G )系统中涌现出了多种新的定位技术,例如 [6], [7], [8] 和 [9],这些技术考虑了以最小的基础设施需求进行定位。当 UE \text{UE} UE 配备天线阵列时,方向估计也是可能的 [8]。
在多普勒辅助定位(Doppler-assisted localization)中,尽管引入了新的未知量(例如速度),但由于移动性形成了一个相较于静止场景具有更大孔径的虚拟阵列,定位性能得以提升 [9]。大多数定位工作依赖于接收信号的理想化模型,这些模型基于高频系统中信道是确定性且稀疏的假设,将接收信号表示为由传播环境引起的信道参数(角度、时延、多普勒)的函数 [1], [6], [8], [10], [11], [12]。
然而在现实中,导频信号可能会由于硬件损伤( HWIs \text{HWIs} HWIs )的存在而发生畸变,例如相位噪声( PN \text{PN} PN )、载波频率偏移( CFO \text{CFO} CFO )、互耦( MC \text{MC} MC )、功率放大器非线性( PAN \text{PAN} PAN )、阵列增益误差( AGE \text{AGE} AGE )、天线位移误差( ADE \text{ADE} ADE )、同相和正交不平衡( IQI \text{IQI} IQI )等 [13]。因此,当算法推导基于失配模型(即信道模型中未考虑 HWIs \text{HWIs} HWIs )时,定位性能将不可避免地受到影响。
文献中已经广泛研究了 HWIs \text{HWIs} HWIs 对通信的影响 [13], [14], [15], [16]。
-
在 [13] 中,对不同类型的损伤进行了精确建模,并讨论了其对多输入多输出( MIMO \text{MIMO} MIMO )正交频分复用( OFDM \text{OFDM} OFDM )系统的影响。
-
在 [14] 中,推导了一个考虑 PAN \text{PAN} PAN 、带有 PN \text{PN} PN 的本地振荡器以及有限分辨率模数转换器( ADCs \text{ADCs} ADCs )的聚合统计 HWI \text{HWI} HWI 模型,并通过数值仿真进行了验证。
-
文献 [15] 讨论了由直流偏置、 MC \text{MC} MC 、 IQI \text{IQI} IQI 和量化噪声引起的残余加性收发机硬件损伤,并推导了频谱效率以量化 HWIs \text{HWIs} HWIs 造成的性能下降。除了对 HWIs \text{HWIs} HWIs 进行建模和分析之外,针对损伤抑制算法的研究也在进行中。通过将硬件损伤引起的信号畸变纳入考虑,
-
文献 [16] 执行了波束成形优化,以最大化目的地的接收信噪比( SNR \text{SNR} SNR )。
-
文献 [17] 设计了一种考虑收发机损伤的信道估计算法,该算法在误比特率和归一化均方误差方面表现出优于传统算法的性能。
-
与基于模型的解决方案相反, HWI \text{HWI} HWI 下的信道估计也可以被建模为一个深度学习问题 [18]。
尽管如此,这些工作仅关注通信性能。
考虑到硬件损伤( HWIs \text{HWIs} HWIs )的定位与感知(此处感知包括检测、角度和时延估计,以及被动目标的跟踪)研究近期受到了关注。
- PN \text{PN} PN 对单基地感知的影响 [19], [20]、 MC \text{MC} MC 对 AOA \text{AOA} AOA 估计的影响 [21]、 IQI \text{IQI} IQI 对毫米波定位的影响 [22] 以及 PAN \text{PAN} PAN 对雷达通信一体化系统的影响 [23] 均已被研究。
然而,这些工作仅考虑了一或两种类型的损伤,无法提供真实场景下的全面分析。
-
在 [24] 和 [25] 中,损伤被建模为附加的高斯噪声,其方差由一个特定的 HWI \text{HWI} HWI 因子决定,并据此讨论了 3 D 3\text{D} 3D 定位的误差界。
-
文献 [26] 讨论了考虑时钟同步误差的 HWIs \text{HWIs} HWIs 影响。
然而, [24], [25] 和 [26] 中的方法未能捕捉到每种单独 HWI \text{HWI} HWI 的贡献。
- 在 [27] 中(该文构成了本文的基础),考虑了一个用于 2 D 2\text{D} 2D 定位的简化同步单输入多输出( SIMO \text{SIMO} SIMO )上行链路系统,结果表明不同类型的损伤以不同方式影响角度和时延估计。
尽管如此,完美同步的假设是不切实际的,且未考虑诸如阵列校准误差和 IQI \text{IQI} IQI 等损伤。除了单独分析 HWIs \text{HWIs} HWIs 对定位或通信的影响外,最近的工作还考虑了联合定位与通信系统中的 HWIs \text{HWIs} HWIs ,并使用基于学习的方法来减轻性能下降 [28], [29]。然而,仅讨论了有限数量的损伤类型( [28] 中的 MC \text{MC} MC 和 ADE \text{ADE} ADE , [29] 中的 IQI \text{IQI} IQI 和直流偏置)。此外,这些工作未进行理论分析,且每种 HWI \text{HWI} HWI 对通信与定位的相对重要性尚不清楚。因此,需要进行更系统的研究,以评估不同类型的 HWI \text{HWI} HWI 对通信和定位性能的影响。
在本文中,我们研究了在多种 HWIs \text{HWIs} HWIs 存在的毫米波通信系统中,利用多个多天线基站( BSs \text{BSs} BSs )(典型的上行链路定位场景)估计多天线用户设备( UE \text{UE} UE )的 3 D 3\text{D} 3D 位置和 3 D 3\text{D} 3D 方向的问题。具体而言,我们考虑一个基于 OFDM \text{OFDM} OFDM 的系统,通过严格建模各种 HWIs \text{HWIs} HWIs 对接收观测值的影响,并假设相应的信道估计和定位算法对这些 HWIs \text{HWIs} HWIs 一无所知,从而导致定位和通信性能的下降。
我们采用失配克拉美-罗界( MCRB \text{MCRB} MCRB ) [30], [31], [32] 来量化由于模型失配导致的估计性能损失。此外,基于所建立的在相同 HWI \text{HWI} HWI 水平下的硬件损伤信道模型,通过符号错误率( SER \text{SER} SER )数值评估了 HWI \text{HWI} HWI 对通信的影响,从而可以公平地比较 HWI \text{HWI} HWI 对通信和定位性能的影响。主要贡献总结如下:
- 包含多种硬件损伤的信道模型: 基于具有完美硬件的理想 MIMO \text{MIMO} MIMO 模型(失配模型 mismatched model( MM \text{MM} MM )),我们为所考虑的毫米波系统开发了一个更通用的信道模型(真实模型( TM \text{TM} TM )),该模型可以在 3 D 3\text{D} 3D 环境中容纳多种 HWI \text{HWI} HWI 类型(包括 PN \text{PN} PN 、 CFO \text{CFO} CFO 、 MC \text{MC} MC 、 PAN \text{PAN} PAN 、 AGE \text{AGE} AGE 、 ADE \text{ADE} ADE 和 IQI \text{IQI} IQI )。据作者所知,这是首次为定位和通信推导出全面且现实的信号模型,该模型明确建模了可能影响高频运行的 5 G / 6 G 5\text{G}/6\text{G} 5G/6G 通信系统的主要 HWIs \text{HWIs} HWIs 。
- 硬件损伤下信道参数估计和定位的解析性能预测: 我们利用 MCRB \text{MCRB} MCRB 分析来评估单个和组合 HWIs \text{HWIs} HWIs 对信道参数估计( AOD \text{AOD} AOD 、 AOA \text{AOA} AOA 和时延估计)以及相应定位性能( 3 D 3\text{D} 3D 位置和 3 D 3\text{D} 3D 方向估计 3D orientation estimation)的影响。这种分析量化了不同类型和水平的 HWIs \text{HWIs} HWIs 对定位关键性能指标( KPIs \text{KPIs} KPIs )(例如位置和方向估计误差界)的影响,这可以为支持新兴应用的 5 G / 6 G 5\text{G}/6\text{G} 5G/6G 无线系统中的 HWI \text{HWI} HWI 校准和缓解策略的精度要求提供指导。
- 性能评估以及与通信的比较: 我们进行了广泛的仿真,以验证 HWI \text{HWI} HWI 对定位和通信性能影响的性能分析。面对 HWIs \text{HWIs} HWIs 的定位和通信性能评估主要有两个目的:
- i \text{i} i )依据不同 HWI \text{HWI} HWI 水平下的 SER \text{SER} SER ,确定 HWI \text{HWI} HWI 的合理水平(评估由 HWI \text{HWI} HWI 引入的定位误差对通信的影响超出了本文的研究范围)。
- ii \text{ii} ii )展示特定 HWIs \text{HWIs} HWIs 对通信和定位性能的不同影响,并为考虑各种 KPIs \text{KPIs} KPIs 的系统设计提供有价值的见解(例如,阵列校准误差虽然对通信影响有限,但也不容忽视)。
我们注意到,影响时延估计的主导因素也会影响通信,而仅影响 AOA \text{AOA} AOA 、 AOD \text{AOD} AOD 的损伤对通信的影响有限。
II. SYSTEM MODEL
A. Geometric Model
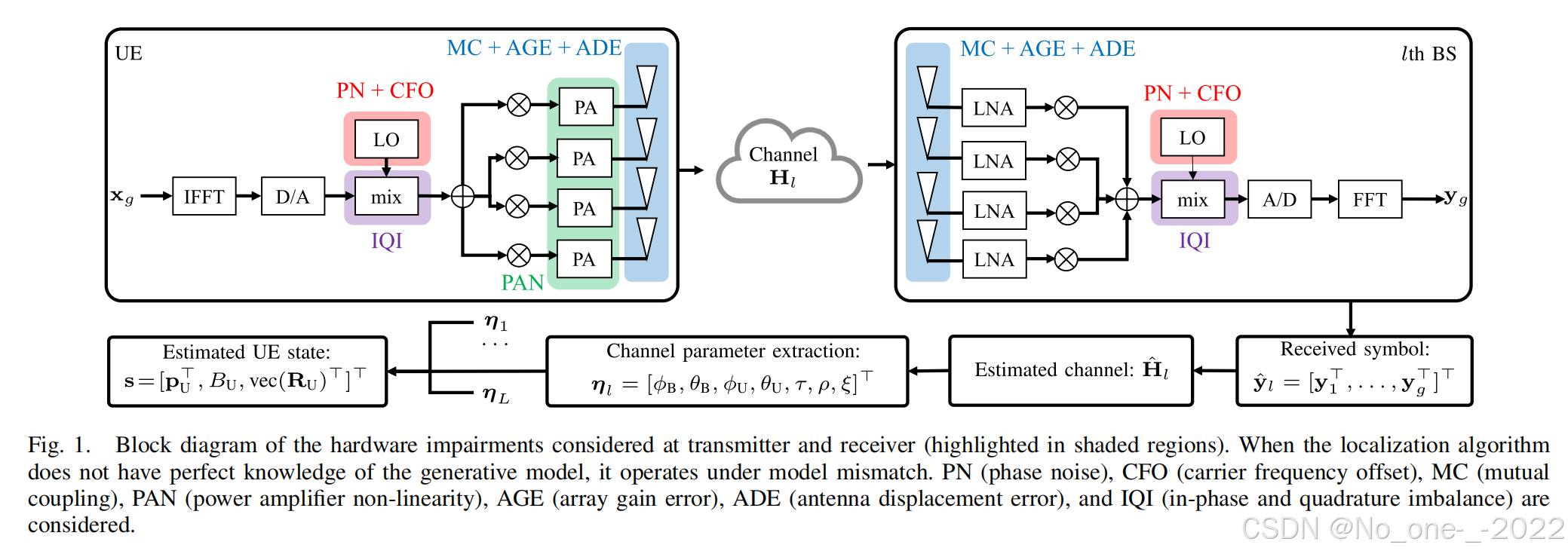
图 1 展示了所考虑的硬件损伤( HWIs \text{HWIs} HWIs )和定位过程的框图。我们考虑一个由一个用户设备( UE \text{UE} UE )和 L L L 个基站( BSs \text{BSs} BSs )组成的上行链路 MIMO \text{MIMO} MIMO 系统。基站和 UE \text{UE} UE 配备了由单射频链( RFC \text{RFC} RFC )驱动的均匀平面阵列( UPA \text{UPA} UPA )(天线位于局部 YZ \text{YZ} YZ 平面上)。第 l l l 个基站和 UE \text{UE} UE 阵列的天线单元数量分别表示为 N B , l = N B , l , z × N B , l , y N_{\text{B},l} = N_{\text{B},l,z} \times N_{\text{B},l,y} NB,l=NB,l,z×NB,l,y 和 N U = N U , z × N U , y N_{\text{U}} = N_{\text{U},z} \times N_{\text{U},y} NU=NU,z×NU,y ,其中 N z N_z Nz 和 N y N_y Ny 分别是 Z \text{Z} Z 轴和 Y \text{Y} Y 轴上的天线数量。基站之间是完美同步的,而 UE \text{UE} UE 和基站之间存在时钟偏差 B U B_{\text{U}} BU 。
我们将全局坐标系中第 l l l 个基站的阵列中心和方向分别表示为 p B , l ∈ R 3 \mathbf{p}_{\text{B},l} \in \mathbb{R}^3 pB,l∈R3 和 o B , l ∈ R 3 \mathbf{o}_{\text{B},l} \in \mathbb{R}^3 oB,l∈R3 。类似地, UE \text{UE} UE 的位置和方向可以表示为 p U , o U \mathbf{p}_{\text{U}}, \mathbf{o}_{\text{U}} pU,oU 。由于由欧拉角向量表示的方向不是唯一的,我们在方向估计中使用旋转矩阵 R B , l ∈ SO ( 3 ) \mathbf{R}_{\text{B},l} \in \text{SO}(3) RB,l∈SO(3) 和 R U ∈ SO ( 3 ) \mathbf{R}_{\text{U}} \in \text{SO}(3) RU∈SO(3) (更多细节参见 [1], [8])。
在定位中,信道估计在每个基站(接收机)处执行,并且组合所有估计值以估计 UE \text{UE} UE (发射机)状态参数向量 s = [ p U ⊤ , B U , vec ( R U ) ⊤ ] ⊤ ∈ R 13 \mathbf{s} = [\mathbf{p}_{\text{U}}^\top, B_{\text{U}}, \text{vec}(\mathbf{R}_{\text{U}})^\top]^\top \in \mathbb{R}^{13} s=[pU⊤,BU,vec(RU)⊤]⊤∈R13 ,其中包含 UE \text{UE} UE 位置 p U \mathbf{p}_{\text{U}} pU 、时钟偏差 B U B_{\text{U}} BU 和旋转矩阵 R U \mathbf{R}_{\text{U}} RU ,如图 1 所示。通过为定位导频信号分配正交的频率和时间资源块,单 UE \text{UE} UE 设置可以扩展到多 UE \text{UE} UE 场景 [33]。
B. Hardware Impairment-Free Model
考虑到第 g g g 次传输和第 k k k 个子载波上的发射 OFDM \text{OFDM} OFDM 符号 2 ^2 2 x g , k x_{g,k} xg,k ,其平均发射功率为 E { ∣ x g , k ∣ 2 } = P / N U \mathbb{E}\{|x_{g,k}|^2\} = P/N_{\text{U}} E{∣xg,k∣2}=P/NU ,它在特定基站(为方便起见省略索引 l l l )处的观测可以公式化为
y g , k = w g ⊤ H k v g x g , k + n g , k , (1) y_{g,k} = \mathbf{w}_g^\top \mathbf{H}_k \mathbf{v}_g x_{g,k} + n_{g,k}, \tag{1} yg,k=wg⊤Hkvgxg,k+ng,k,(1)
其中 w g ∈ C N B \mathbf{w}_g \in \mathbb{C}^{N_\text{B}} wg∈CNB 是基站在第 g g g 次传输时的合并器, v g ∈ C N U \mathbf{v}_g \in \mathbb{C}^{N_\text{U}} vg∈CNU 是 UE \text{UE} UE 处的预编码器,两者都具有单位幅度的元素, n g , k ∈ C N ( 0 , w g H w g σ n 2 ) n_{g,k} \in \mathcal{CN}(0, \mathbf{w}_g^\mathsf{H} \mathbf{w}_g \sigma_n^2) ng,k∈CN(0,wgHwgσn2) 是噪声向量,每个元素服从复正态分布,其中 σ n 2 = N 0 W \sigma_n^2 = N_0 W σn2=N0W ( N 0 N_0 N0 是噪声功率谱密度( PSD \text{PSD} PSD ), W = K Δ f W = K \Delta_f W=KΔf 是总带宽,包含 K K K 个子载波,子载波间隔为 Δ f \Delta_f Δf )。我们假设 H k \mathbf{H}_k Hk 在 G G G 次传输期间保持不变(在相干时间内)。子载波 k k k 处的信道矩阵由下式给出
H k = α d k ( τ ) a B ( φ B ) a U ⊤ ( φ U ) ⏟ LOS path + ∑ p = 1 P α p d p , k ( τ p ) a B ( φ B , p ) a U ⊤ ( φ U , p ) ⏟ NLOS paths , (2) \mathbf{H}_k = \underbrace{\alpha d_k(\tau) \mathbf{a}_\text{B}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}_\text{U}^\top(\boldsymbol{\varphi}_\text{U})}_{\text{LOS path}} + \underbrace{\sum_{p=1}^{P} \alpha_p d_{p,k}(\tau_p) \mathbf{a}_\text{B}(\boldsymbol{\varphi}_{\text{B},p}) \mathbf{a}_\text{U}^\top(\boldsymbol{\varphi}_{\text{U},p})}_{\text{NLOS paths}}, \tag{2} Hk=LOS path αdk(τ)aB(φB)aU⊤(φU)+NLOS paths p=1∑Pαpdp,k(τp)aB(φB,p)aU⊤(φU,p),(2)
其中对于视距( LOS \text{LOS} LOS )路径, α = ρ e − j ξ \alpha = \rho e^{-j\xi} α=ρe−jξ ( ρ \rho ρ 和 ξ \xi ξ 分别为幅度和相位)是复信道增益,假设对于不同的子载波是相同的, d k ( τ ) = e − j 2 π k Δ f τ d_k(\tau) = e^{-j2\pi k \Delta_f \tau} dk(τ)=e−j2πkΔfτ ( Δ f \Delta_f Δf 是子载波间隔)是路径时延 τ \tau τ 的函数,而 a B ( φ B ) \mathbf{a}_\text{B}(\boldsymbol{\varphi}_\text{B}) aB(φB) 和 a U ( φ U ) \mathbf{a}_\text{U}(\boldsymbol{\varphi}_\text{U}) aU(φU) 分别是作为 AOA \text{AOA} AOA φ B = [ ϕ B , θ B ] ⊤ \boldsymbol{\varphi}_\text{B} = [\phi_\text{B}, \theta_\text{B}]^\top φB=[ϕB,θB]⊤ (方位角 ϕ B \phi_\text{B} ϕB 和仰角 θ B \theta_\text{B} θB )和 AOD \text{AOD} AOD φ U = [ ϕ U , θ U ] ⊤ \boldsymbol{\varphi}_\text{U} = [\phi_\text{U}, \theta_\text{U}]^\top φU=[ϕU,θU]⊤ 函数的接收机和发射机导向矢量。 N N N 单元阵列的导向矢量 a ( φ ) \mathbf{a}(\boldsymbol{\varphi}) a(φ) 是(入射或出射)信号方向和天线单元位置的函数,可以表示为(which can be expressed as) [1]
a ( φ ) = e j 2 π f c c Z ⊤ t ( φ ) , (3) \mathbf{a}(\boldsymbol{\varphi}) = e^{j\frac{2\pi f_c}{c} \mathbf{Z}^\top \mathbf{t}(\boldsymbol{\varphi})}, \tag{3} a(φ)=ejc2πfcZ⊤t(φ),(3)
其中我们逐元素应用指数运算, Z ∈ R 3 × N \mathbf{Z} \in \mathbb{R}^{3 \times N} Z∈R3×N 是包含局部坐标系中 N N N 个天线位置的矩阵( Z \mathbf{Z} Z 的第一行全为零), t ( φ ) = [ cos ( θ ) cos ( ϕ ) , cos ( θ ) sin ( ϕ ) , sin ( θ ) ] ⊤ \mathbf{t}(\boldsymbol{\varphi}) = [\cos(\theta)\cos(\phi), \cos(\theta)\sin(\phi), \sin(\theta)]^\top t(φ)=[cos(θ)cos(ϕ),cos(θ)sin(ϕ),sin(θ)]⊤ 。对于非视距( NLOS \text{NLOS} NLOS )路径,每条路径可以对应单次或多次反射,或漫散射。
因此,在这项工作中, NLOS \text{NLOS} NLOS 路径将不用于 UE \text{UE} UE 的定位。我们进一步假设 LOS \text{LOS} LOS 路径相对于 NLOS \text{NLOS} NLOS 路径是可分辨的(尽管 NLOS \text{NLOS} NLOS 路径可能彼此无法分辨)。这对于 5 G / 6 G 5\text{G}/6\text{G} 5G/6G 系统是一个合理的假设 3 ^3 3 ,因为带宽大且天线数量多 [10]。
- 例如,带宽为 1 GHz 且有 8 × 8 8 \times 8 8×8 基站阵列时,可实现 30 cm 的时延分辨率和 22 度的角度分辨率。除非 UE 非常靠近反射体,否则多径在联合角度-时延域中是可以分辨的。
在不损失一般性的情况下,第 k k k 个子载波的信道矩阵可以简化为
H k = α d k ( τ ) a B ( φ B ) a U ⊤ ( φ U ) . (4) \mathbf{H}_k = \alpha d_k(\tau) \mathbf{a}_\text{B}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}_\text{U}^\top(\boldsymbol{\varphi}_\text{U}). \tag{4} Hk=αdk(τ)aB(φB)aU⊤(φU).(4)
相应地,基站和 UE \text{UE} UE 之间的 LOS \text{LOS} LOS 路径的信道几何参数向量定义为 η ch = [ η 1 ⊤ , … , η L ⊤ ] ⊤ \boldsymbol{\eta}_\text{ch} = [\boldsymbol{\eta}_1^\top, \dots, \boldsymbol{\eta}_L^\top]^\top ηch=[η1⊤,…,ηL⊤]⊤ ,其中对于第 l l l 个基站, η l = [ φ B , l ⊤ , φ U , l ⊤ , τ l , ρ l , ξ l ] ⊤ ∈ R 7 \boldsymbol{\eta}_l = [\boldsymbol{\varphi}_{\text{B},l}^\top, \boldsymbol{\varphi}_{\text{U},l}^\top, \tau_l, \rho_l, \xi_l]^\top \in \mathbb{R}^7 ηl=[φB,l⊤,φU,l⊤,τl,ρl,ξl]⊤∈R7 。为了后续分析,我们定义一个去除了所有干扰参数(the nuisance parameters,即每条路径的复信道增益,因为我们不利用信号强度进行定位)的向量 c ch = [ c 1 ⊤ , … , c L ⊤ ] ⊤ \mathbf{c}_\text{ch} = [\mathbf{c}_1^\top, \dots, \mathbf{c}_L^\top]^\top cch=[c1⊤,…,cL⊤]⊤ ,其中 c l = [ φ B , l ⊤ , φ U , l ⊤ , τ l ] ⊤ ∈ R 5 \mathbf{c}_l = [\boldsymbol{\varphi}_{\text{B},l}^\top, \boldsymbol{\varphi}_{\text{U},l}^\top, \tau_l]^\top \in \mathbb{R}^5 cl=[φB,l⊤,φU,l⊤,τl]⊤∈R5 。信道参数向量 c \mathbf{c} c 和状态参数(state parameters) s \mathbf{s} s 之间的关系可以表示为
φ B = [ ϕ B θ B ] = [ arctan 2 ( t B , 2 , t B , 1 ) arcsin ( t B , 3 ) ] , (5) \boldsymbol{\varphi}_\text{B} = \begin{bmatrix} \phi_\text{B} \\ \theta_\text{B} \end{bmatrix} = \begin{bmatrix} \arctan 2(t_{\text{B},2}, t_{\text{B},1}) \\ \arcsin(t_{\text{B},3}) \end{bmatrix}, \tag{5} φB=[ϕBθB]=[arctan2(tB,2,tB,1)arcsin(tB,3)],(5) φ U = [ ϕ U θ U ] = [ arctan 2 ( t U , 2 , t U , 1 ) arcsin ( t U , 3 ) ] , (6) \boldsymbol{\varphi}_\text{U} = \begin{bmatrix} \phi_\text{U} \\ \theta_\text{U} \end{bmatrix} = \begin{bmatrix} \arctan 2(t_{\text{U},2}, t_{\text{U},1}) \\ \arcsin(t_{\text{U},3}) \end{bmatrix}, \tag{6} φU=[ϕUθU]=[arctan2(tU,2,tU,1)arcsin(tU,3)],(6) τ = ∥ p U − p B ∥ c + B U , (7) \tau = \frac{\|\mathbf{p}_\text{U} - \mathbf{p}_\text{B}\|}{c} + B_\text{U}, \tag{7} τ=c∥pU−pB∥+BU,(7)
其中 c c c 是光速, t B = [ t B , 1 , t B , 2 , t B , 3 ] ⊤ \mathbf{t}_\text{B} = [t_{\text{B},1}, t_{\text{B},2}, t_{\text{B},3}]^\top tB=[tB,1,tB,2,tB,3]⊤ 和 t U = [ t U , 1 , t U , 2 , t U , 3 ] ⊤ \mathbf{t}_\text{U} = [t_{\text{U},1}, t_{\text{U},2}, t_{\text{U},3}]^\top tU=[tU,1,tU,2,tU,3]⊤ 是局部坐标系中的方向向量,可以使用全局方向向量和旋转矩阵表示为
t B = R B − 1 p U − p B ∥ p U − p B ∥ , t U = R U − 1 p B − p U ∥ p B − p U ∥ . (8) \mathbf{t}_\text{B} = \mathbf{R}_\text{B}^{-1} \frac{\mathbf{p}_\text{U} - \mathbf{p}_\text{B}}{\|\mathbf{p}_\text{U} - \mathbf{p}_\text{B}\|}, \quad \mathbf{t}_\text{U} = \mathbf{R}_\text{U}^{-1} \frac{\mathbf{p}_\text{B} - \mathbf{p}_\text{U}}{\|\mathbf{p}_\text{B} - \mathbf{p}_\text{U}\|}. \tag{8} tB=RB−1∥pU−pB∥pU−pB,tU=RU−1∥pB−pU∥pB−pU.(8)
t B = [ t B , 1 , t B , 2 , t B , 3 ] ⊤ \mathbf{t}_\text{B} = [t_{\text{B},1}, t_{\text{B},2}, t_{\text{B},3}]^\top tB=[tB,1,tB,2,tB,3]⊤ 是信号在基站天线面板看来射入的 ( x , y , z ) (x, y, z) (x,y,z) 方向分量。
最后,通过将所有接收到的符号连接成一列,我们获得接收符号块 y ∈ R G K \mathbf{y} \in \mathbb{R}^{GK} y∈RGK 为 y = [ y 1 ⊤ , … , y g ⊤ , … , y G ⊤ ] ⊤ \mathbf{y} = [\mathbf{y}_1^\top, \dots, \mathbf{y}_g^\top, \dots, \mathbf{y}_G^\top]^\top y=[y1⊤,…,yg⊤,…,yG⊤]⊤ ,其中 y g = [ y g , 1 , … , y g , K ] ⊤ \mathbf{y}_g = [y_{g,1}, \dots, y_{g,K}]^\top yg=[yg,1,…,yg,K]⊤ 可以表示为
y g = α ( w g ⊤ a ( φ B ) a ⊤ ( φ U ) v g ) d ( τ ) ⊙ x g + n g , (9) \mathbf{y}_g = \alpha (\mathbf{w}_g^\top \mathbf{a}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}^\top(\boldsymbol{\varphi}_\text{U}) \mathbf{v}_g) \mathbf{d}(\tau) \odot \mathbf{x}_g + \mathbf{n}_g, \tag{9} yg=α(wg⊤a(φB)a⊤(φU)vg)d(τ)⊙xg+ng,(9)
其中 d ( τ ) = [ d 1 ( τ ) , … , d K ( τ ) ] ⊤ \mathbf{d}(\tau) = [d_1(\tau), \dots, d_K(\tau)]^\top d(τ)=[d1(τ),…,dK(τ)]⊤ , x g = [ x g , 1 , … , x g , K ] ⊤ \mathbf{x}_g = [x_{g,1}, \dots, x_{g,K}]^\top xg=[xg,1,…,xg,K]⊤ ,且 n g = [ n g , 1 , … , n g , K ] ⊤ \mathbf{n}_g = [n_{g,1}, \dots, n_{g,K}]^\top ng=[ng,1,…,ng,K]⊤ 。
1. 结合单子载波模型与信道模型
将 LOS \text{LOS} LOS 信道表达式 H k = α d k ( τ ) a B a U ⊤ \mathbf{H}_k = \alpha d_k(\tau) \mathbf{a}_\text{B} \mathbf{a}_\text{U}^\top Hk=αdk(τ)aBaU⊤ (公式 4)代入接收信号方程(公式 1):
y g , k = w g ⊤ ( α d k ( τ ) a B ( φ B ) a U ⊤ ( φ U ) ) v g x g , k + n g , k y_{g,k} = \mathbf{w}_g^\top \left( \alpha d_k(\tau) \mathbf{a}_\text{B}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}_\text{U}^\top(\boldsymbol{\varphi}_\text{U}) \right) \mathbf{v}_g x_{g,k} + n_{g,k} yg,k=wg⊤(αdk(τ)aB(φB)aU⊤(φU))vgxg,k+ng,k
2. 变量分离(空间域 vs 频域)
将与子载波索引 k k k 无关的项(空间波束成形增益)提取为标量系数,将与 k k k 有关的项(时延相位与符号)保留:
y g , k = α ( w g ⊤ a B ( φ B ) a U ⊤ ( φ U ) v g ) ⏟ 空间标量增益 (常数) ⋅ d k ( τ ) x g , k ⏟ 频域变量 (随 k 变化) + n g , k y_{g,k} = \underbrace{\alpha (\mathbf{w}_g^\top \mathbf{a}_\text{B}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}_\text{U}^\top(\boldsymbol{\varphi}_\text{U}) \mathbf{v}_g)}_{\text{空间标量增益 (常数)}} \cdot \underbrace{d_k(\tau) x_{g,k}}_{\text{频域变量 (随 } k \text{ 变化)}} + n_{g,k} yg,k=空间标量增益 (常数) α(wg⊤aB(φB)aU⊤(φU)vg)⋅频域变量 (随 k 变化) dk(τ)xg,k+ng,k
3. 向量化(Vectorization)
将所有 K K K 个子载波堆叠为列向量。此时,时延向量 d ( τ ) \mathbf{d}(\tau) d(τ) 与发送符号向量 x g \mathbf{x}_g xg 的对应元素相乘转化为 Hadamard 积( ⊙ \odot ⊙ ):
[ y g , 1 ⋮ y g , K ] ⏟ y g = α ( w g ⊤ a B a U ⊤ v g ) [ d 1 ( τ ) x g , 1 ⋮ d K ( τ ) x g , K ] ⏟ d ( τ ) ⊙ x g + n g \underbrace{\begin{bmatrix} y_{g,1} \\ \vdots \\ y_{g,K} \end{bmatrix}}_{\mathbf{y}_g} = \alpha (\mathbf{w}_g^\top \mathbf{a}_\text{B} \mathbf{a}_\text{U}^\top \mathbf{v}_g) \underbrace{\begin{bmatrix} d_1(\tau) x_{g,1} \\ \vdots \\ d_K(\tau) x_{g,K} \end{bmatrix}}_{\mathbf{d}(\tau) \odot \mathbf{x}_g} + \mathbf{n}_g yg yg,1⋮yg,K =α(wg⊤aBaU⊤vg)d(τ)⊙xg d1(τ)xg,1⋮dK(τ)xg,K +ng
4. 最终结果(公式 9)
y g = α ( w g ⊤ a ( φ B ) a ⊤ ( φ U ) v g ) d ( τ ) ⊙ x g + n g \mathbf{y}_g = \alpha (\mathbf{w}_g^\top \mathbf{a}(\boldsymbol{\varphi}_\text{B}) \mathbf{a}^\top(\boldsymbol{\varphi}_\text{U}) \mathbf{v}_g) \mathbf{d}(\tau) \odot \mathbf{x}_g + \mathbf{n}_g yg=α(wg⊤a(φB)a⊤(φU)vg)d(τ)⊙xg+ng
脚注
2. 对于通信,可以采用不同的调制(例如 16-QAM)。而对于定位,通常使用恒模导频 [1], [6], [7], [8] 和 [10]。
C. Hardware Impairments
在这项工作中,如图 1 所示,我们考虑了几种类型的硬件损伤( HWIs \text{HWIs} HWIs )。我们研究了 PN \text{PN} PN 、 CFO \text{CFO} CFO 、 MC \text{MC} MC 、 PAN \text{PAN} PAN 、 AGE \text{AGE} AGE 、 ADE \text{ADE} ADE 和 IQI \text{IQI} IQI 的影响。需要注意的是,诸如 PN \text{PN} PN 、 CFO \text{CFO} CFO 、 MC \text{MC} MC 、 AGE \text{AGE} AGE 、 ADE \text{ADE} ADE 和 IQI \text{IQI} IQI 等损伤在发射机和接收机处均存在,而 PAN \text{PAN} PAN 仅出现在发射机处。 HWIs \text{HWIs} HWIs 通常在离线校准期间或在线使用专用信号和程序进行补偿,具体取决于损伤是静态的还是时变的。
在这项工作中,我们将除 PAN \text{PAN} PAN 以外的所有 HWIs \text{HWIs} HWIs 建模为围绕标称值的随机扰动,这些扰动对应于校准后的时变损伤(即 PN \text{PN} PN 和 CFO \text{CFO} CFO )的残余误差 [34], [35], [36],以及静态损伤(即 MC \text{MC} MC [37]、 AGE \text{AGE} AGE [38]、 ADE \text{ADE} ADE [18] 和 IQI \text{IQI} IQI [22])的设备集合对应的误差。为了评估不同类型的导频信号的影响, PAN \text{PAN} PAN 被设定为固定的。未考虑 ADC \text{ADC} ADC 、数模转换器( DAC \text{DAC} DAC )、低噪声放大器和混频器的缺陷。
1) 相位噪声和载波频率偏移: 上变频和下变频过程中不完美的本地振荡器( LOs \text{LOs} LOs )会将 PN \text{PN} PN 添加到载波相位中。此外,当接收机中的下变频 LO \text{LO} LO 未能与接收信号的载波完美同步时 [39],就会发生 CFO \text{CFO} CFO。通常, PN \text{PN} PN 和 CFO \text{CFO} CFO 都会由接收机进行估计和补偿 [40],因此我们只考虑接收机处的残余 PN \text{PN} PN 和残余 CFO \text{CFO} CFO 。存在 PN \text{PN} PN 和 CFO \text{CFO} CFO 时,观测值 y g , k y_{g,k} yg,k 被修改为 [36]
y g , k → f k ⊤ E g Ξ g F H y g , (10) y_{g,k} \rightarrow \mathbf{f}_k^\top \mathbf{E}_g \mathbf{\Xi}_g \mathbf{F}^\mathsf{H} \mathbf{y}_g, \tag{10} yg,k→fk⊤EgΞgFHyg,(10)
E g = e j 2 π ϵ g K tot K diag ( [ 1 , e j 2 π ϵ K , … , e j 2 π ( K − 1 ) ϵ K ] ) , (11) \mathbf{E}_g = e^{j\frac{2\pi \epsilon g K_{\text{tot}}}{K}} \text{diag}([1, e^{j\frac{2\pi \epsilon}{K}}, \dots, e^{j\frac{2\pi (K-1)\epsilon}{K}}]), \tag{11} Eg=ejK2πϵgKtotdiag([1,ejK2πϵ,…,ejK2π(K−1)ϵ]),(11)
Ξ g = diag ( [ e j ν g , 1 , … , e j ν g , K ] ) , (12) \mathbf{\Xi}_g = \text{diag}([e^{j\nu_{g,1}}, \dots, e^{j\nu_{g,K}}]), \tag{12} Ξg=diag([ejνg,1,…,ejνg,K]),(12)
其中
- y g \mathbf{y}_g yg 是没有 PN \text{PN} PN 或 CFO \text{CFO} CFO 时的理想模型接收信号(即来自 (1) ),
- F = [ f 1 , f 2 , … , f K ] \mathbf{F} = [\mathbf{f}_1, \mathbf{f}_2, \dots, \mathbf{f}_K] F=[f1,f2,…,fK] 是 FFT \text{FFT} FFT 矩阵。
- CFO \text{CFO} CFO 矩阵 E g \mathbf{E}_g Eg 既考虑了 OFDM \text{OFDM} OFDM 符号间的相位变化,也考虑了载波间干扰 [36], [41]。更具体地说, K tot = K + K cp K_{\text{tot}} = K + K_{\text{cp}} Ktot=K+Kcp ,其中 K cp K_{\text{cp}} Kcp 是循环前缀的长度, ϵ \epsilon ϵ 是残余 CFO \text{CFO} CFO ,且 ϵ ∼ N ( 0 , σ CFO 2 ) \epsilon \sim \mathcal{N}(0, \sigma_{\text{CFO}}^2) ϵ∼N(0,σCFO2)。
- Ξ g \mathbf{\Xi}_g Ξg 是残余 PN \text{PN} PN 矩阵 4 ^4 4 ,其中 ν g , k ∼ N ( 0 , σ PN 2 ) \nu_{g,k} \sim \mathcal{N}(0, \sigma_{\text{PN}}^2) νg,k∼N(0,σPN2)。
在 (10) 中,向量 y g \mathbf{y}_g yg 通过 F H y g \mathbf{F}^\mathsf{H} \mathbf{y}_g FHyg 转换为时域,在此处施加连续的 PN \text{PN} PN 样本以及 CFO \text{CFO} CFO。最后, f k ⊤ \mathbf{f}_k^\top fk⊤ 在对 E g Ξ g F H y g \mathbf{E}_g \mathbf{\Xi}_g \mathbf{F}^\mathsf{H} \mathbf{y}_g EgΞgFHyg 应用 FFT \text{FFT} FFT 后提取第 k k k 个子载波。注意,对于每次实现(例如,一次包含 G G G 次传输的定位测量),残余 CFO \text{CFO} CFO ϵ \epsilon ϵ 是固定的,而 PN \text{PN} PN ν g , k \nu_{g,k} νg,k 对于所有子载波和 OFDM \text{OFDM} OFDM 符号都是不同的。
4 ^4 4 注意 ν g , k \nu_{g,k} νg,k 和 ϵ \epsilon ϵ 表示在载波同步过程处理(例如 [42], [43])之后残留的 PN \text{PN} PN 和 CFO \text{CFO} CFO。因此,假设 ν g , k \nu_{g,k} νg,k 在时间上是独立的。 Ξ g = diag ( [ e j ν g , 1 , … , e j ν g , K ] ) \mathbf{\Xi}_g = \text{diag}([e^{j\nu_{g,1}}, \dots, e^{j\nu_{g,K}}]) Ξg=diag([ejνg,1,…,ejνg,K])
它也是一个对角矩阵,意味着它对时域的每一个采样点施加一个随机的相位旋转,在经过接收机锁相环(PLL)或估计算法补偿后,剩下的“残余 PN”通常被建模为零均值的高斯白噪声 ν ∼ N ( 0 , σ PN 2 ) \nu \sim \mathcal{N}(0, \sigma_{\text{PN}}^2) ν∼N(0,σPN2)。
1. 归一化频率偏差定义
将物理频偏 Δ f \Delta f Δf 归一化为相对于子载波间隔 Δ f sc \Delta f_{\text{sc}} Δfsc 的无量纲参数 ϵ \epsilon ϵ:
ϵ = Δ f Δ f sc ⇒ Δ f = ϵ ⋅ Δ f sc = ϵ ⋅ 1 K T s \epsilon = \frac{\Delta f}{\Delta f_{\text{sc}}} \quad \Rightarrow \quad \Delta f = \epsilon \cdot \Delta f_{\text{sc}} = \epsilon \cdot \frac{1}{K T_s} ϵ=ΔfscΔf⇒Δf=ϵ⋅Δfsc=ϵ⋅KTs1
其中 T s T_s Ts 为采样周期, K K K 为 FFT 点数(有效数据长度)。
2. 物理时间累积
相位积累取决于真实的物理时间流逝。到达第 g g g 个 OFDM 符号时,必须计入每个符号的循环前缀 ( K cp K_{\text{cp}} Kcp)。总采样点数为:
N total = g × ( K + K cp ) = g K tot N_{\text{total}} = g \times (K + K_{\text{cp}}) = g K_{\text{tot}} Ntotal=g×(K+Kcp)=gKtot
对应的物理时间 t t t 为:
t = N total ⋅ T s = g K tot T s t = N_{\text{total}} \cdot T_s = g K_{\text{tot}} T_s t=Ntotal⋅Ts=gKtotTs
3. 相位计算
将 Δ f \Delta f Δf 和 t t t 代入线性相位公式 ϕ ( t ) = 2 π Δ f t \phi(t) = 2\pi \Delta f t ϕ(t)=2πΔft:
ϕ g = 2 π ⋅ ( ϵ K T s ) ⏟ Δ f ⋅ ( g K tot T s ) ⏟ t = 2 π ⋅ ϵ K T s ⋅ g K tot T s = 2 π ϵ g K tot K \begin{aligned} \phi_g &= 2\pi \cdot \underbrace{\left( \frac{\epsilon}{K T_s} \right)}_{\Delta f} \cdot \underbrace{\left( g K_{\text{tot}} T_s \right)}_{t} \\ &= 2\pi \cdot \frac{\epsilon}{K \bcancel{T_s}} \cdot g K_{\text{tot}} \bcancel{T_s} \\ &= \frac{2\pi \epsilon g K_{\text{tot}}}{K} \end{aligned} ϕg=2π⋅Δf (KTsϵ)⋅t (gKtotTs)=2π⋅KTs ϵ⋅gKtotTs =K2πϵgKtot
这就是公式 (11) 中指数项的来源:分子体现了物理时间的真实流逝(含 CP),分母体现了归一化的频率定义基准。
2) 互耦: MC \text{MC} MC 指的是阵列中天线单元之间的电磁相互作用 [21]。对于 UPA \text{UPA} UPA ,我们采用如 [37] 中的 MC \text{MC} MC 模型,假设天线仅受周围单元耦合的影响。因此, MC \text{MC} MC 矩阵可以表示为
C = [ C 1 C 2 0 ⋯ 0 C 2 C 1 0 ⋯ 0 ⋮ ⋱ ⋱ ⋱ ⋮ 0 ⋯ C 2 C 1 C 2 0 ⋯ 0 C 2 C 1 ] . (13) \mathbf{C} = \begin{bmatrix} \mathbf{C}_1 & \mathbf{C}_2 & \mathbf{0} & \cdots & \mathbf{0} \\ \mathbf{C}_2 & \mathbf{C}_1 & \mathbf{0} & \cdots & \mathbf{0} \\ \vdots & \ddots & \ddots & \ddots & \vdots \\ \mathbf{0} & \cdots & \mathbf{C}_2 & \mathbf{C}_1 & \mathbf{C}_2 \\ \mathbf{0} & \cdots & \mathbf{0} & \mathbf{C}_2 & \mathbf{C}_1 \end{bmatrix}. \tag{13} C= C1C2⋮00C2C1⋱⋯⋯00⋱C20⋯⋯⋱C1C200⋮C2C1 .(13)
此处, C ∈ C N z N y × N z N y \mathbf{C} \in \mathbb{C}^{N_z N_y \times N_z N_y} C∈CNzNy×NzNy 是具有子矩阵 C 1 = Toeplitz ( [ 1 , c x , 0 … , 0 ] ) ∈ C N y × N y \mathbf{C}_1 = \text{Toeplitz}([1, c_x, 0 \dots, 0]) \in \mathbb{C}^{N_y \times N_y} C1=Toeplitz([1,cx,0…,0])∈CNy×Ny 和 C 2 = Toeplitz ( [ c x , c x y , 0 , … , 0 ] ) ∈ C N y × N y \mathbf{C}_2 = \text{Toeplitz}([c_x, c_{xy}, 0, \dots, 0]) \in \mathbb{C}^{N_y \times N_y} C2=Toeplitz([cx,cxy,0,…,0])∈CNy×Ny 的 MC \text{MC} MC 矩阵,其中 c x c_x cx 和 c x y c_{xy} cxy 分别是特定天线与其周围距离为 0.5 0.5 0.5 和 2 / 2 \sqrt{2}/2 2/2 波长的天线之间的耦合系数 [37]。
C 1 = [ 1 c x 0 0 ⋯ 0 c x 1 c x 0 ⋯ 0 0 c x 1 c x ⋯ 0 ⋮ ⋱ ⋱ ⋱ ⋱ ⋮ 0 ⋯ 0 c x 1 c x 0 ⋯ 0 0 c x 1 ] N y × N y \mathbf{C}_1 = \begin{bmatrix} 1 & c_x & 0 & 0 & \cdots & 0 \\ c_x & 1 & c_x & 0 & \cdots & 0 \\ 0 & c_x & 1 & c_x & \cdots & 0 \\ \vdots & \ddots & \ddots & \ddots & \ddots & \vdots \\ 0 & \cdots & 0 & c_x & 1 & c_x \\ 0 & \cdots & 0 & 0 & c_x & 1 \end{bmatrix}_{N_y \times N_y} C1= 1cx0⋮00cx1cx⋱⋯⋯0cx1⋱0000cx⋱cx0⋯⋯⋯⋱1cx000⋮cx1 Ny×Ny
c x c_x cx 出现在 ( i , i + 1 ) (i, i+1) (i,i+1) 和 ( i + 1 , i ) (i+1, i) (i+1,i) 位置,代表第 i i i 个天线和第 i + 1 i+1 i+1 个天线之间的相互影响。C 2 = [ c x c x y 0 0 ⋯ 0 c x y c x c x y 0 ⋯ 0 0 c x y c x c x y ⋯ 0 ⋮ ⋱ ⋱ ⋱ ⋱ ⋮ 0 ⋯ 0 c x y c x c x y 0 ⋯ 0 0 c x y c x ] N y × N y \mathbf{C}_2 = \begin{bmatrix} c_x & c_{xy} & 0 & 0 & \cdots & 0 \\ c_{xy} & c_x & c_{xy} & 0 & \cdots & 0 \\ 0 & c_{xy} & c_x & c_{xy} & \cdots & 0 \\ \vdots & \ddots & \ddots & \ddots & \ddots & \vdots \\ 0 & \cdots & 0 & c_{xy} & c_x & c_{xy} \\ 0 & \cdots & 0 & 0 & c_{xy} & c_x \end{bmatrix}_{N_y \times N_y} C2= cxcxy0⋮00cxycxcxy⋱⋯⋯0cxycx⋱0000cxy⋱cxy0⋯⋯⋯⋱cxcxy000⋮cxycx Ny×Ny
这个矩阵描述的是上面一行的天线如何干扰下面一行的天线。主对角线元素 ( c x c_x cx),描述第 1 行的第 i i i 个天线与第 2 行的第 i i i 个天线之间的耦合;第一副对角线元素 ( c x y c_{xy} cxy),描述第 1 行的第 i i i 个天线与第 2 行的第 i ± 1 i \pm 1 i±1 个天线之间的耦合。
为方便起见,我们使用一个变量 σ MC \sigma_{\text{MC}} σMC 来表示 MC \text{MC} MC 的严重程度,使得 c x ∼ C N ( 0 , σ MC 2 ) c_x \sim \mathcal{CN}(0, \sigma_{\text{MC}}^2) cx∼CN(0,σMC2) 且 c x y ∼ C N ( 0 , σ MC 2 / 4 ) c_{xy} \sim \mathcal{CN}(0, \sigma_{\text{MC}}^2/4) cxy∼CN(0,σMC2/4)。 MC \text{MC} MC 导致信道矩阵进行如下替换
H k → C B H k C U ⊤ . (14) \mathbf{H}_k \rightarrow \mathbf{C}_\text{B} \mathbf{H}_k \mathbf{C}_\text{U}^\top. \tag{14} Hk→CBHkCU⊤.(14)
3) 功率放大器非线性: 对于 PA \text{PA} PA (power amplifier nonlinearity)非线性,我们考虑一个 Q Q Q 阶无记忆多项式非线性模型 [13],其截断点 x clip ∈ R x_{\text{clip}} \in \mathbb{R} xclip∈R 为
h PA ( x ˇ t ) = { ∑ q = 0 Q − 1 β q + 1 x ˇ t ∣ x ˇ t ∣ q ∣ x ˇ t ∣ ≤ x clip , ∑ q = 0 Q − 1 β q + 1 x ˇ t ∣ x ˇ t ∣ ∣ x clip ∣ q + 1 ∣ x ˇ t ∣ > x clip , (15) h_{\text{PA}}(\check{x}_t) = \begin{cases} \sum_{q=0}^{Q-1} \beta_{q+1} \check{x}_t |\check{x}_t|^q & |\check{x}_t| \leq x_{\text{clip}}, \\ \sum_{q=0}^{Q-1} \beta_{q+1} \frac{\check{x}_t}{|\check{x}_t|} |x_{\text{clip}}|^{q+1} & |\check{x}_t| > x_{\text{clip}}, \end{cases} \tag{15} hPA(xˇt)={∑q=0Q−1βq+1xˇt∣xˇt∣q∑q=0Q−1βq+1∣xˇt∣xˇt∣xclip∣q+1∣xˇt∣≤xclip,∣xˇt∣>xclip,(15)
其中 x ˇ t = x t / R \check{x}_t = x_t/R xˇt=xt/R 表示时域发射信号的电压( R R R 是以欧姆为单位的负载阻抗), β 1 , … , β Q \beta_1, \dots, \beta_Q β1,…,βQ 是复数值参数。我们假设 (15) 模拟了数字预失真和功率放大器的共同影响,并且为了进行可处理的定位性能分析,我们使用非过采样信号作为 PA \text{PA} PA 的输入 5 ^5 5。注意, PA \text{PA} PA 影响时域信号,且发射机处的每个天线都有单独的 PA \text{PA} PA , (15) 中的 PA \text{PA} PA 模型不考虑带外发射(仅考虑带内失真)。为简单起见,不同 PAs \text{PAs} PAs 的模型是相同的, h PA ( x ˇ t ) \mathbf{h}_{\text{PA}}(\check{\mathbf{x}}_t) hPA(xˇt) 返回引入了 PA \text{PA} PA 非线性的时域信号向量(通过对每个元素进行逐点运算)。
5.为了全面表征功率放大器非线性( PAN \text{PAN} PAN )的影响,需要使用过采样模型。除了符号失真之外,该模型还能捕捉到由非线性引入的符号间干扰( ISI \text{ISI} ISI )(参见 [44] 中的公式 (25))。
该公式描述了一个带硬截断的无记忆多项式模型,用于模拟发射机功率放大器(PA)在不同输入幅度下的非线性失真特性。
h PA ( x ˇ t ) = { ∑ q = 0 Q − 1 β q + 1 x ˇ t ∣ x ˇ t ∣ q ∣ x ˇ t ∣ ≤ x clip , ∑ q = 0 Q − 1 β q + 1 x ˇ t ∣ x ˇ t ∣ ∣ x clip ∣ q + 1 ∣ x ˇ t ∣ > x clip , (15) h_{\text{PA}}(\check{x}_t) = \begin{cases} \sum_{q=0}^{Q-1} \beta_{q+1} \check{x}_t |\check{x}_t|^q & |\check{x}_t| \leq x_{\text{clip}}, \\ \sum_{q=0}^{Q-1} \beta_{q+1} \frac{\check{x}_t}{|\check{x}_t|} |x_{\text{clip}}|^{q+1} & |\check{x}_t| > x_{\text{clip}}, \end{cases} \tag{15} hPA(xˇt)={∑q=0Q−1βq+1xˇt∣xˇt∣q∑q=0Q−1βq+1∣xˇt∣xˇt∣xclip∣q+1∣xˇt∣≤xclip,∣xˇt∣>xclip,(15)
核心变量定义:
- x ˇ t \check{x}_t xˇt:归一化的时域输入信号电压。
- x clip x_{\text{clip}} xclip:放大器的截断阈值(即 PA 能输出的最大电压幅度)。
- β q + 1 \beta_{q+1} βq+1:复数拟合参数,决定了非线性失真的程度和相位旋转方向。
- 非饱和区(Soft Distortion Region)
条件: ∣ x ˇ t ∣ ≤ x clip |\check{x}_t| \leq x_{\text{clip}} ∣xˇt∣≤xclip (信号幅度未超过物理极限)
输出 = ∑ q = 0 Q − 1 β q + 1 x ˇ t ∣ x ˇ t ∣ q \text{输出} = \sum_{q=0}^{Q-1} \beta_{q+1} \check{x}_t |\check{x}_t|^q 输出=q=0∑Q−1βq+1xˇt∣xˇt∣q
- 物理含义: 放大器处于工作区,使用多项式级数来拟合其输入输出特性。
- 主要效应:
- 线性放大 ( q = 0 q=0 q=0): β 1 x ˇ t \beta_1 \check{x}_t β1xˇt 提供主要增益。
- 非线性失真 ( q > 0 q>0 q>0): 高阶项(如 x ˇ t ∣ x ˇ t ∣ 2 \check{x}_t |\check{x}_t|^2 xˇt∣xˇt∣2)引入干扰。由于 β \beta β 是复数,这不仅导致幅度上的增益压缩 (AM-AM),还会导致相位上的非线性旋转 (AM-PM),使星座图发生畸变。
- 饱和截断区(Hard Clipping Region)
条件: ∣ x ˇ t ∣ > x clip |\check{x}_t| > x_{\text{clip}} ∣xˇt∣>xclip (信号幅度超过物理极限)
输出 = x ˇ t ∣ x ˇ t ∣ ⏟ 相位方向 ⋅ ∑ q = 0 Q − 1 β q + 1 ∣ x clip ∣ q + 1 ⏟ 幅度钳位 \text{输出} = \underbrace{\frac{\check{x}_t}{|\check{x}_t|}}_{\text{相位方向}} \cdot \underbrace{\sum_{q=0}^{Q-1} \beta_{q+1} |x_{\text{clip}}|^{q+1}}_{\text{幅度钳位}} 输出=相位方向 ∣xˇt∣xˇt⋅幅度钳位 q=0∑Q−1βq+1∣xclip∣q+1
- 物理含义: 放大器进入饱和状态,无法输出更大的电压。
- 主要效应:
- 幅度钳位: 无论输入多大,计算公式中的幅度项强制替换为最大值 x clip x_{\text{clip}} xclip,即波形顶端被“削平”。
- 相位保持: 保留输入信号的原始相位方向 x ˇ t ∣ x ˇ t ∣ \frac{\check{x}_t}{|\check{x}_t|} ∣xˇt∣xˇt,假设截断操作本身不引入额外的随机相位跳变。
4) 阵列校准误差(array gain error ,AGE; antenna displacement error, ADE): 阵列校准误差是由阵列增益和天线位移的变化引起的。为了对 AGE \text{AGE} AGE 进行建模,我们将第 n n n 个天线在方向 φ \boldsymbol{\varphi} φ 上的复激励系数定义为 [38]
b n ( φ ) = ( 1 + δ a ) e j δ p , (16) b_n(\boldsymbol{\varphi}) = (1 + \delta_a)e^{j\delta_p}, \tag{16} bn(φ)=(1+δa)ejδp,(16)
其中 δ a ∈ N ( 0 , σ AA 2 ) \delta_a \in \mathcal{N}(0, \sigma^2_{\text{AA}}) δa∈N(0,σAA2) 和 δ p ∈ N ( 0 , σ AP 2 ) \delta_p \in \mathcal{N}(0, \sigma^2_{\text{AP}}) δp∈N(0,σAP2) 分别是相对幅度误差和相位误差。关于 ADE \text{ADE} ADE ,我们假设第 n n n 个天线的位置在局部坐标系的 2 D 2\text{D} 2D 平面上存在位移,即
z ~ n = z n + [ 0 , δ n , y , δ n , z ] ⊤ , (17) \tilde{\mathbf{z}}_n = \mathbf{z}_n + [0, \delta_{n,y}, \delta_{n,z}]^\top, \tag{17} z~n=zn+[0,δn,y,δn,z]⊤,(17)
其中 z n ∈ R 3 \mathbf{z}_n \in \mathbb{R}^3 zn∈R3 是局部坐标系中第 n n n 个天线的理想位置, δ n , y , δ n , z ∈ N ( 0 , σ ADE 2 ) \delta_{n,y}, \delta_{n,z} \in \mathcal{N}(0, \sigma^2_{\text{ADE}}) δn,y,δn,z∈N(0,σADE2) 是位移误差。导向矢量随之修改为
a ( φ ) → b ( φ ) ⊙ e j 2 π λ Z ~ ⊤ t , (18) \mathbf{a}(\boldsymbol{\varphi}) \rightarrow \mathbf{b}(\boldsymbol{\varphi}) \odot e^{j \frac{2\pi}{\lambda} \tilde{\mathbf{Z}}^\top \mathbf{t}}, \tag{18} a(φ)→b(φ)⊙ejλ2πZ~⊤t,(18)
其中 Z ~ = [ z ~ 1 , … , z ~ N ] \tilde{\mathbf{Z}} = [\tilde{\mathbf{z}}_1, \dots, \tilde{\mathbf{z}}_N] Z~=[z~1,…,z~N] 包含所有天线的几何信息。阵列校准误差对于特定阵列是固定的,但在不同设备之间会有所变化。
5) 同相和正交不平衡: in-phase and quadrature imbalance, IQI \text{IQI} IQI 作用于时域信号,发射符号向量被修改为 [22]
x g → F ( α U F H x g + β U F H x g ∗ ) = α U x g + β U x g ∗ , (19) \mathbf{x}_g \rightarrow \mathbf{F}(\alpha_\text{U} \mathbf{F}^\mathsf{H} \mathbf{x}_g + \beta_\text{U} \mathbf{F}^\mathsf{H} \mathbf{x}_g^*) = \alpha_\text{U} \mathbf{x}_g + \beta_\text{U} \mathbf{x}_g^*, \tag{19} xg→F(αUFHxg+βUFHxg∗)=αUxg+βUxg∗,(19)
公式描述了信号从 频域 转到 时域,遭受损伤,再转回 频域 的全过程
其中 FFT \text{FFT} FFT 矩阵 F \mathbf{F} F 和 IFFT \text{IFFT} IFFT 矩阵 F H \mathbf{F}^\mathsf{H} FH 用于在时域和频域之间切换, α U = 1 2 + 1 2 m U e j ψ U \alpha_\text{U} = \frac{1}{2} + \frac{1}{2} m_\text{U} e^{j\psi_\text{U}} αU=21+21mUejψU , β U = 1 2 − 1 2 m U e − j ψ U \beta_\text{U} = \frac{1}{2} - \frac{1}{2} m_\text{U} e^{-j\psi_\text{U}} βU=21−21mUe−jψU , m U m_\text{U} mU 和 ψ U \psi_\text{U} ψU 分别是 UE \text{UE} UE 端的幅度和相位不平衡参数。我们假设系统中的 IQI \text{IQI} IQI 已被补偿,从而产生残余损伤,不平衡参数可以建模为 m U ∼ N ( 1 , σ IA 2 ) m_\text{U} \sim \mathcal{N}(1, \sigma^2_\text{IA}) mU∼N(1,σIA2) 和 ϕ U ∼ N ( 0 , σ IP 2 ) \phi_\text{U} \sim \mathcal{N}(0, \sigma^2_\text{IP}) ϕU∼N(0,σIP2)。类似地,接收基站处的 IQI \text{IQI} IQI 可以表示为
y g → α B y g + β B y g ∗ . (20) \mathbf{y}_g \rightarrow \alpha_\text{B} \mathbf{y}_g + \beta_\text{B} \mathbf{y}_g^*. \tag{20} yg→αByg+βByg∗.(20)
更精确的频率相关 IQI \text{IQI} IQI 模型可以在 [45] 和 [46] 中找到,这超出了本文的范围(which is beyond the scope of this work)。
1. 物理模型构建
理想的单频复信号为 x ( t ) = e j ω t x(t) = e^{j\omega t} x(t)=ejωt。
在存在 IQ 不平衡(IQI)的发射机中,I 路保持理想,Q 路存在幅度增益 m m m 和相位偏差 ψ \psi ψ。实际生成的物理信号 x ~ ( t ) \tilde{x}(t) x~(t) 为:
x ~ ( t ) = cos ( ω t ) + j ⋅ m ⋅ sin ( ω t + ψ ) \tilde{x}(t) = \cos(\omega t) + j \cdot m \cdot \sin(\omega t + \psi) x~(t)=cos(ωt)+j⋅m⋅sin(ωt+ψ)2. 欧拉公式展开
利用 cos ( θ ) = e j θ + e − j θ 2 \cos(\theta) = \frac{e^{j\theta} + e^{-j\theta}}{2} cos(θ)=2ejθ+e−jθ 和 sin ( θ ) = e j θ − e − j θ 2 j \sin(\theta) = \frac{e^{j\theta} - e^{-j\theta}}{2j} sin(θ)=2jejθ−e−jθ 将三角函数展开为指数形式:
x ~ ( t ) = [ e j ω t + e − j ω t 2 ] + j ⋅ m ⋅ [ e j ( ω t + ψ ) − e − j ( ω t + ψ ) 2 j ] = 1 2 ( e j ω t + e − j ω t ) + m 2 ( e j ψ e j ω t − e − j ψ e − j ω t ) \begin{aligned} \tilde{x}(t) &= \left[ \frac{e^{j\omega t} + e^{-j\omega t}}{2} \right] + j \cdot m \cdot \left[ \frac{e^{j(\omega t + \psi)} - e^{-j(\omega t + \psi)}}{2j} \right] \\ &= \frac{1}{2}(e^{j\omega t} + e^{-j\omega t}) + \frac{m}{2}(e^{j\psi} e^{j\omega t} - e^{-j\psi} e^{-j\omega t}) \end{aligned} x~(t)=[2ejωt+e−jωt]+j⋅m⋅[2jej(ωt+ψ)−e−j(ωt+ψ)]=21(ejωt+e−jωt)+2m(ejψejωt−e−jψe−jωt)3. 分离主信号与镜像信号
将代表原始信号的 e j ω t e^{j\omega t} ejωt 和代表共轭镜像的 e − j ω t e^{-j\omega t} e−jωt 进行分组整理:
- e j ω t e^{j\omega t} ejωt 项系数 (定义为 α \alpha α):
来自 cos \cos cos 的部分加上来自 sin \sin sin 的部分(正频率相长干涉):
α = 1 2 + 1 2 m e j ψ \alpha = \frac{1}{2} + \frac{1}{2} m e^{j\psi} α=21+21mejψ- e − j ω t e^{-j\omega t} e−jωt 项系数 (定义为 β \beta β):
来自 cos \cos cos 的部分减去来自 sin \sin sin 的部分(负频率相消干涉不彻底):
β = 1 2 − 1 2 m e − j ψ \beta = \frac{1}{2} - \frac{1}{2} m e^{-j\psi} β=21−21me−jψ4. 最终结果
由于 x ( t ) = e j ω t x(t) = e^{j\omega t} x(t)=ejωt,且 x ∗ ( t ) = e − j ω t x^*(t) = e^{-j\omega t} x∗(t)=e−jωt,因此时域信号模型可写为:x ~ ( t ) = α x ( t ) + β x ∗ ( t ) \tilde{x}(t) = \alpha x(t) + \beta x^*(t) x~(t)=αx(t)+βx∗(t)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 16
16 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)