机器人学会举一反三!
华盛顿大学与博世AI中心联合推出STRAP框架,突破机器人少样本学习瓶颈。该方案通过子轨迹分割技术将复杂任务拆解为原子动作,利用预训练视觉模型提取鲁棒特征,并创新性提出S-DTW算法实现细粒度跨任务检索。实验表明,STRAP能有效解决传统方法在多任务负迁移、检索粒度不合理和视觉差异敏感等方面的痛点,使机器人仅需少量演示即可快速掌握新技能。这一突破为家庭服务机器人的实际应用提供了更高效的模仿学习方案
当家庭服务机器人面对“把马克杯放进抽屉并关紧”“将西兰花放入冰箱保鲜层”这类多样化任务时,我们总希望它能像人类一样“举一反三”。
传统多任务模型为了兼顾通用性,往往陷入“样样通却样样松”的负迁移困境;现有检索式学习要么困于领域特定编码器的局限性,要么受限于全轨迹检索的粗粒度,无法挖掘不同任务间共享的底层动作规律。
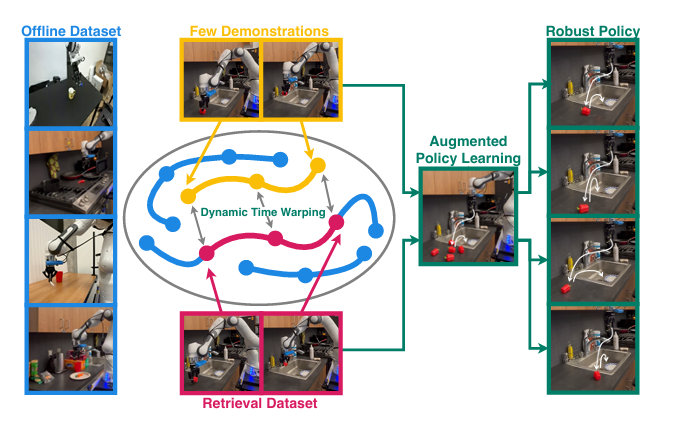
就在这样的技术困局中,华盛顿大学与博世人工智能中心联合提出的STRAP(Sub-sequence Trajectory Retrieval for Augmented Policy Learning)框架横空出世,以“子轨迹检索”为核心创新点,构建了一套从数据利用到政策训练的完整解决方案。
项目链接:https://weirdlabuw.github.io/strap/static/documents/strap_2025.pdf
一、STRAP有什么用?
在STRAP出现之前,机器人少样本模仿学习始终被三重枷锁牢牢束缚,这些痛点也直接催生了STRAP方法体系的设计逻辑。
1. 多任务学习的“负迁移陷阱”
多任务策略训练的初衷本是“集百家之长”——通过整合大量不同任务的数据,让模型习得通用技能以适应新场景。但现实往往事与愿违:不同任务的语义逻辑存在天然冲突,模型为了覆盖更多任务,不得不牺牲单任务的优化精度,最终陷入“平均主义陷阱”。
比如训练一个同时包含“拾取易碎花瓶”和“搬运沉重铁块”的模型时,前者需要轻柔缓慢的动作,后者需要果断有力的发力,模型很难同时兼顾两种动作的核心特征,导致在单独执行任一任务时都表现拉胯。
2. 传统检索方法的“粒度困境”
检索式学习本是少样本场景的“救星”——利用少量目标任务数据,从大规模离线数据集中检索相关样本辅助训练。
但现有方法存在两大致命缺陷:
一是“特征鲁棒性不足”,依赖在特定数据集上训练的领域特定编码器,一旦环境光照、物体纹理发生变化,特征提取就会“失效”;
二是“检索粒度不合理”,要么检索单个状态-动作对,丢失了动作的时序动态信息;要么检索完整轨迹,而完整轨迹中往往包含大量与目标任务无关的片段,同时无法捕捉不同任务间共享的局部行为。
举个具体的例子:当目标任务是“将碗放入橱柜抽屉并关闭”时,现有全轨迹检索方法可能因为找不到“完全一致的完整轨迹”而束手无策,却忽略了“拾取碗”“推动抽屉关闭”这些核心子动作,在“将杯子放在抽屉上”“打开顶柜并关闭底柜”等其他任务中其实普遍存在。
这种“捡了芝麻丢西瓜”的检索方式,让大量有价值的跨任务数据被浪费,直接限制了模型的泛化能力。
3. 视觉差异与数据效率的“矛盾死结”
现实世界的机器人操作场景,天生具有“多样性”特质:同样是“拾取苹果”,在厨房的暖光环境下、书房的冷光环境下,甚至苹果表面是否带水珠,都会导致视觉观测的巨大差异。现有方法大多依赖“场景专属”的特征提取器,环境一变,特征表示的鲁棒性就急剧下降,检索和训练效果自然大打折扣。
同时,机器人学习对“数据效率”的要求极高。在家庭服务场景中,不可能为每个新任务收集几十上百次专家演示——不仅耗时耗力,还可能因场景限制(如操作易碎品、危险品)无法重复收集。
正是这三重枷锁的叠加,让研究团队意识到:必须跳出“全轨迹检索”和“多任务蛮力训练”的固有思维,从“子轨迹”这一更精细的粒度切入,构建一套全新的方法体系——STRAP由此诞生。
二、STRAP的核心方法
如果把STRAP比作一台精密运转的“智能检索-训练引擎”,那么子轨迹分割、视觉特征编码、子序列动态时间规整检索(S-DTW)、语言条件政策训练这四大模块,
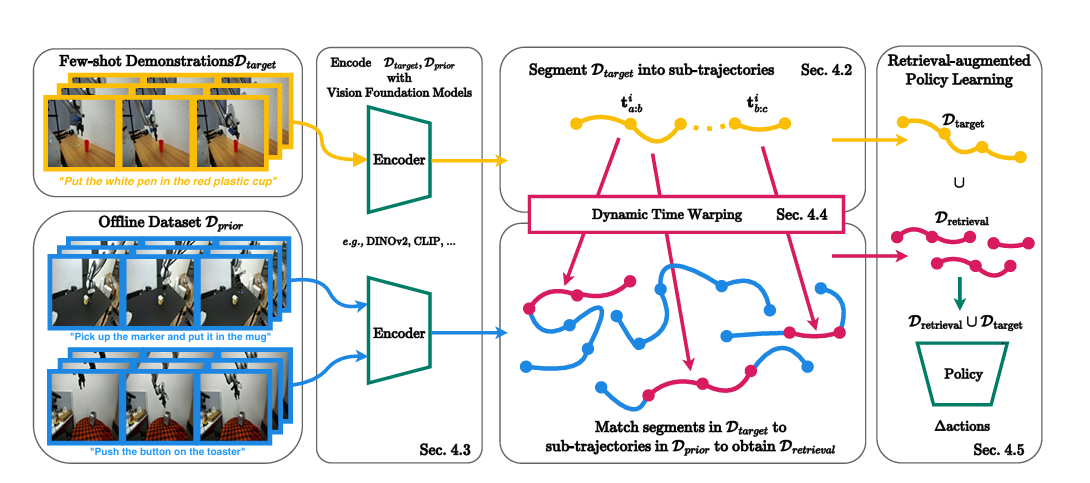
1. 子轨迹分割:
其核心逻辑很简单:机器人执行原子动作时,末端执行器的速度会呈现“启动-稳定-停止”的规律;而在两个原子动作之间的过渡阶段,末端执行器的速度会趋近于零。基于这一特性,STRAP设定了一个速度阈值,当机器人末端执行器的速度绝对值持续低于该阈值时,就判定为“动作过渡点”,以此为界分割子轨迹。
比如在“拾取碗-放入抽屉-关闭抽屉”的完整轨迹中,机器人拾取碗后会有短暂的停顿(速度趋近于零),这个停顿点就会被识别为“拾取碗”和“移动碗到抽屉”两个子轨迹的分界点;而在将碗放入抽屉后,又会有一个停顿点,分割出“移动碗到抽屉”和“关闭抽屉”两个子轨迹。为了避免分割出过短的“无效片段”,STRAP还会对长度小于20个时间步的子轨迹进行合并,确保每个子轨迹都能完整反映一个原子动作的动态过程。
这种自动分割方法的优势显而易见:
一是完全脱离对外部标注的依赖,适配任意任务场景;
二是分割精度高,能精准捕捉原子动作的边界;
三是效率极高,可实时处理机器人的轨迹数据。正是这一模块,为STRAP后续的精准检索打下了“零件级”的基础。
2. 视觉特征编码:
子轨迹分割完成后,下一步就是提取特征——这是检索的“核心依据”。传统方法的痛点在于,特征提取器是“场景专属”的,换个环境就“失灵”。STRAP的解决方案是:直接采用预训练的视觉基础模型作为特征提取器,利用其在海量数据上习得的“通用视觉认知能力”,抵御场景变化的干扰。
具体的编码过程非常简洁:STRAP将机器人的相机观测(包括手部特写相机和全局场景相机的图像)输入视觉基础模型,直接输出768维的特征向量。与传统方法不同的是,STRAP不会对一个子轨迹中的连续观测特征进行“时序平均”,而是完整保留每个时间步的特征向量——因为原子动作的动态性恰恰体现在“特征随时间的变化规律”中,平均化会丢失关键的时序信息。
为了验证这种编码方式的鲁棒性,研究团队做了一组对比实验:分别用DINOv2、CLIP和传统的领域特定编码器提取特征,在不同光照、不同物体姿态的场景下进行检索。
更重要的是,这种编码方式完全“开箱即用”——不需要在机器人数据集上进行任何微调,极大降低了部署门槛。对于机器人开发者而言,只需将相机图像输入预训练模型,就能得到鲁棒的特征向量,无需再花费大量精力训练专属编码器。
3. S-DTW检索:
有了“零件”(子轨迹)和“语言”(特征向量),接下来就是最关键的一步:如何从大规模离线数据集中,精准找到与目标子轨迹最相似的子轨迹?这就需要解决两个核心问题:一是目标子轨迹与候选子轨迹的“长度可能不同”;二是两者的“时序节奏可能存在差异”(比如一个动作快,一个动作慢)。
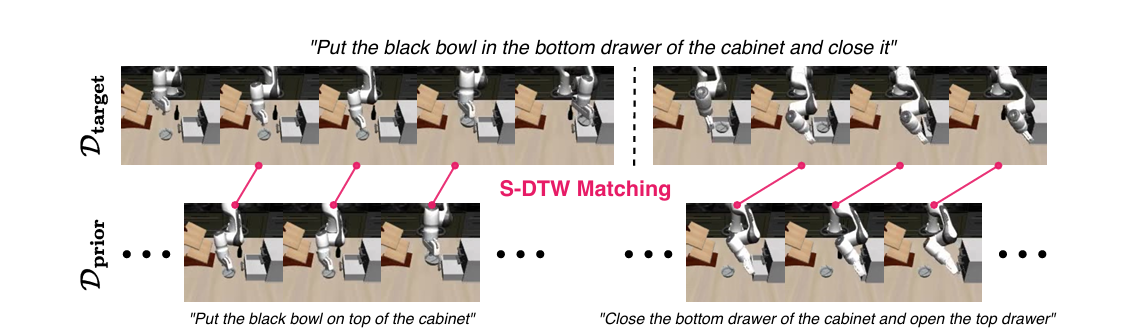
S-DTW的运作过程可以分为“三步走”,我们用一个具体例子来理解:假设目标子轨迹是“拾取碗”(包含50个时间步,特征序列为Q),候选轨迹是“拾取杯子-移动到桌面-关闭抽屉”(包含200个时间步,特征序列为C),我们需要从C中找到与Q最相似的子片段。
点击链接机器人学会举一反三!阅读原文

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 7
7 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)