探索多智能体分布式模型预测控制:编队与队形变换的奥秘
多智能体分布式模型预测控制在编队和队形变换方面有着丰富的应用和研究价值。通过MATLAB代码示例,我们初步展示了如何实现无人机编队控制以及队形变换。在论文复现过程中,详细的文档记录和对智能体数量变化影响的研究都是非常重要的环节。希望这篇博文能让大家对多智能体分布式模型预测控制有更直观的了解,也鼓励大家进一步探索这个有趣的领域!以上就是今天关于多智能体分布式模型预测控制在编队与队形变换方面的分享啦,
(文献+程序)多智能体分布式模型预测控制 编队 队形变换 论文复现带文档 MATLAB MPC 无人车 无人机编队 无人船无人艇控制 编队控制强化学习 嵌入式应用 simulink仿真验证 PID 智能体数量变化
在智能控制领域,多智能体分布式模型预测控制一直是个热门话题,特别是在编队和队形变换方面有着广泛的应用。今天咱就来聊聊这个有趣的领域,顺便看看如何进行论文复现,还会涉及到MATLAB MPC以及在无人车、无人机编队,甚至无人船无人艇控制中的应用,同时也会探讨一下智能体数量变化对结果的影响。
一、多智能体分布式模型预测控制基础
多智能体系统由多个自主智能体组成,它们通过协作来完成复杂任务。分布式模型预测控制(DMPC)则是一种基于模型预测控制(MPC)的方法,用于协调这些智能体的行为。
简单来说,MPC是一种基于模型的优化控制策略,它通过预测系统未来的行为,并在每个采样时刻求解一个有限时域的优化问题来确定当前的控制输入。而DMPC则将这个优化问题分解到各个智能体上,每个智能体根据本地信息进行优化,同时考虑与其他智能体的交互。
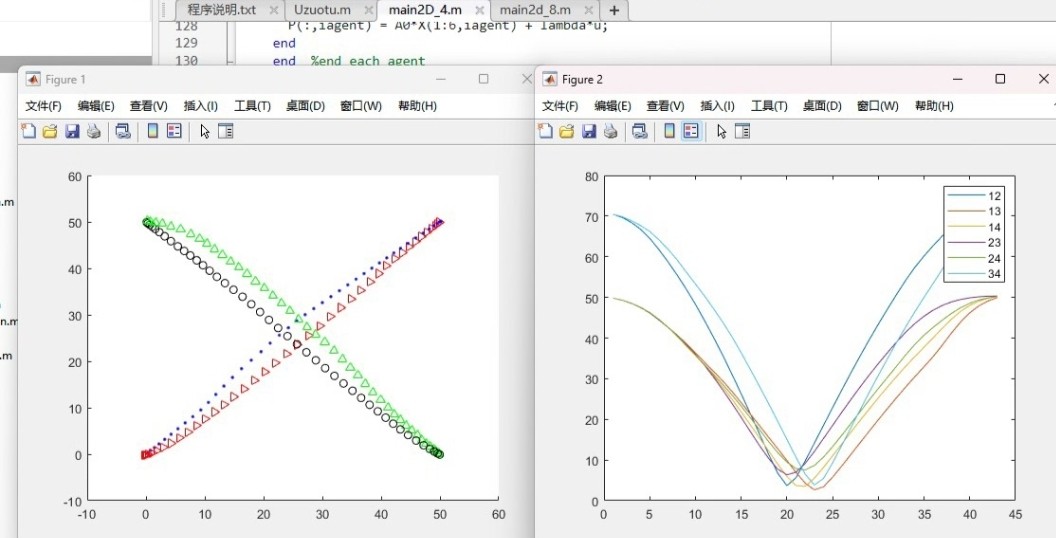
二、编队控制
编队控制是多智能体系统的一个重要应用场景。例如,无人机编队可以执行侦察、搜索救援等任务。下面我们来看一个简单的无人机编队控制的代码示例(假设使用MATLAB):
% 定义智能体数量
numAgents = 3;
% 初始化智能体状态
agentStates = zeros(2, numAgents);
% 目标编队形状(例如直线编队)
targetFormation = [1 0; 2 0; 3 0];
% 控制参数
Q = eye(2); % 状态权重矩阵
R = eye(1); % 控制输入权重矩阵
horizon = 5; % 预测时域
for k = 1:100 % 模拟时间步
for i = 1:numAgents
% 构建预测模型
A = eye(2);
B = [0.1 0; 0 0.1];
% 预测未来状态
predictedStates = zeros(2, horizon);
predictedStates(:,1) = agentStates(:,i);
for j = 1:horizon-1
predictedStates(:,j+1) = A * predictedStates(:,j) + B * u(:,j);
end
% 构建成本函数
cost = 0;
for j = 1:horizon
cost = cost + (predictedStates(:,j) - targetFormation(i,:))' * Q * (predictedStates(:,j) - targetFormation(i,:)) + u(:,j)' * R * u(:,j);
end
% 求解优化问题得到控制输入
[uOpt, ~] = quadprog(Q, zeros(2,1), [], [], A, B, [], [], [], optimoptions('quadprog','Display','off'));
% 更新智能体状态
agentStates(:,i) = agentStates(:,i) + 0.1 * [uOpt(1); uOpt(2)];
end
end代码分析:
- 首先定义了智能体数量
numAgents,并初始化了智能体状态agentStates。 - 设定了目标编队形状
targetFormation。 - 接着定义了控制参数
Q、R和预测时域horizon。 - 在每个时间步
k中,对于每个智能体i: - 构建预测模型
A和B,用于预测未来状态predictedStates。 - 通过预测状态构建成本函数
cost,目标是使智能体状态接近目标编队。 - 使用
quadprog函数求解优化问题得到控制输入uOpt。 - 最后更新智能体状态
agentStates。
三、队形变换
队形变换是多智能体编队控制的另一个关键特性。比如从直线编队变换为圆形编队。这就需要智能体之间更加灵活地调整相对位置。
% 从直线编队变换为圆形编队
for k = 1:100 % 模拟时间步
targetRadius = 2;
for i = 1:numAgents
angle = 2 * pi * (i - 1) / numAgents;
targetFormation(i,:) = [targetRadius * cos(angle); targetRadius * sin(angle)];
% 后续控制步骤与编队控制类似,重新计算成本函数和控制输入,更新状态
end
end代码分析:
- 这里通过改变
targetFormation的计算方式来实现队形从直线到圆形的变换。 - 对于每个智能体
i,根据其序号计算在圆形编队中的角度angle,从而确定其在圆形编队中的位置targetFormation(i,:)。 - 之后的控制步骤(如计算成本函数、求解控制输入和更新状态)与之前的编队控制类似,只是使用新的目标编队形状。
四、论文复现与文档
在进行论文复现的过程中,详细的文档记录非常重要。它不仅有助于我们自己理解代码和实验过程,也方便后续与他人分享和交流。
我们可以创建一个文档,记录每个参数的含义、实验步骤、不同智能体数量下的实验结果等等。例如,在文档中可以这样描述:
“在本次论文复现中,我们研究了智能体数量变化对编队控制和队形变换的影响。当智能体数量增加时,系统的复杂性也相应增加,但通过合理调整控制参数,仍然能够实现稳定的编队和灵活的队形变换。具体来说,在[具体实验条件]下,智能体数量从[初始值]增加到[最终值],我们观察到编队的收敛速度和队形变换的平滑度都有一定变化……”
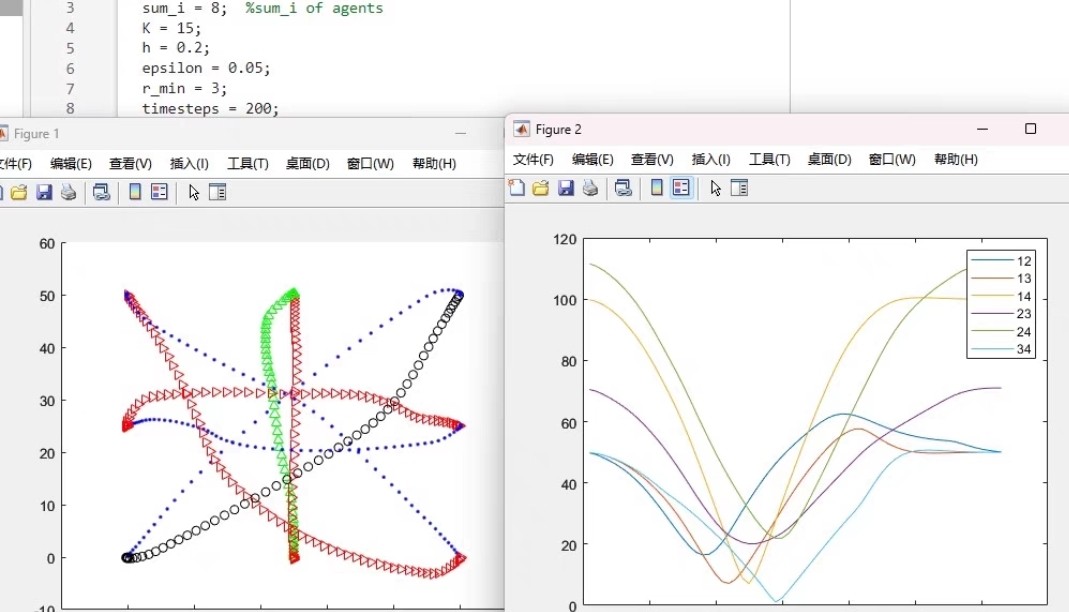
五、智能体数量变化的影响
智能体数量的变化会显著影响多智能体系统的性能。随着智能体数量的增加,信息交互和协调的难度也会增大。
% 测试不同智能体数量
numAgentsList = [3, 5, 7];
for numAgents = numAgentsList
% 初始化智能体状态等操作与之前类似
% 进行编队控制和队形变换实验
% 记录实验结果,例如编队收敛时间、队形变换误差等
end代码分析:
- 通过一个循环遍历不同的智能体数量
numAgentsList。 - 在每次循环中,重新初始化智能体状态等相关参数,并进行编队控制和队形变换实验。
- 记录每次实验的结果,以便后续分析智能体数量对系统性能的影响。
当智能体数量增加时,我们可能会发现编队收敛时间变长,因为每个智能体都需要更多时间来获取其他智能体的信息并调整自己的行为。而在队形变换方面,可能会出现变换过程不够平滑,误差增大等情况。
六、总结
多智能体分布式模型预测控制在编队和队形变换方面有着丰富的应用和研究价值。通过MATLAB代码示例,我们初步展示了如何实现无人机编队控制以及队形变换。在论文复现过程中,详细的文档记录和对智能体数量变化影响的研究都是非常重要的环节。希望这篇博文能让大家对多智能体分布式模型预测控制有更直观的了解,也鼓励大家进一步探索这个有趣的领域!
以上就是今天关于多智能体分布式模型预测控制在编队与队形变换方面的分享啦,大家如果有什么问题或者想法,欢迎留言讨论!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)