多智能体协同编队控制:DWA与VO融合避障的实现
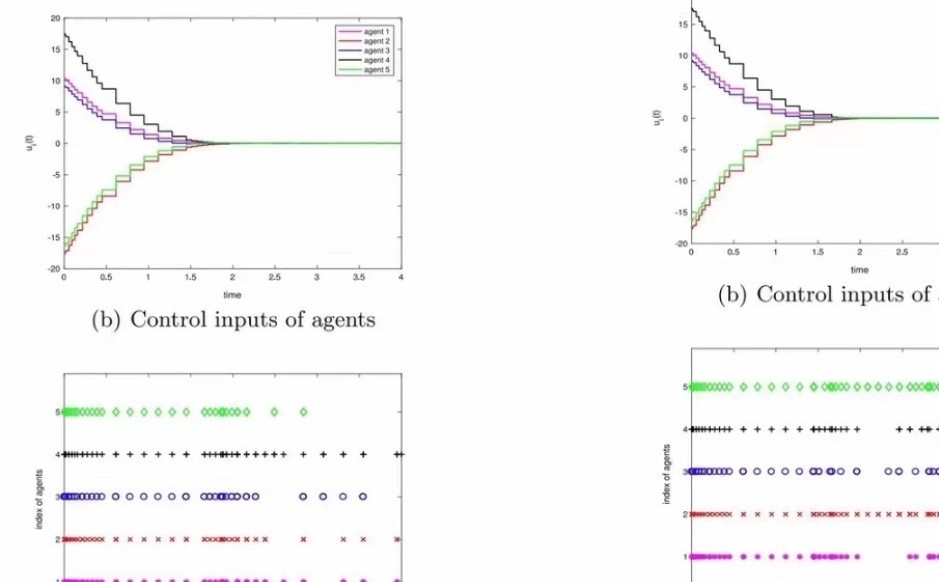
通过改进的DWA和融合VO的方法,我们成功实现了多智能体在动态环境中的协同编队控制。这种方法不仅提升了编队控制的效率,还增强了避障的安全性。未来,我们可以通过调整更多的参数和优化算法,进一步提升编队控制的效果,让机器人的协同工作更加智能和顺畅。
多智能体协同编队控制,分布式模型预测控制方法实现matlab仿真代码,多机器人协同编队控制。 复现的高水平sci文献。 改进动态窗口DWA算法动态避障。 融合速度障碍法躲避动态障碍物 1.增加障碍物搜索角 2.改进评价函数,优先选取角速度小的速度组合以增加轨迹的平滑性 3.融合速度障碍法(VO)增强避开动态障碍物的能力 地图大小,障碍物位置,速度,半径均可自由调节 有参考,代码完全自己编写matlab
智能体协同编队:集体智慧的体现
在机器人的领域中,多智能体协同编队控制一直是研究的热点。当单个机器人面对复杂任务时,往往力不从心。而多个机器人协同工作,就像一支配合默契的乐队,各司其职,奏响优美的乐章。每个智能体都能保持编队形态,同时避开障碍物,完成任务,展现着集体智慧的魔力。
分布式模型预测控制:从全局角度看世界
在多智能体系统中,每个机器人不仅仅是单打独斗的个体,更是团队中的重要一员。分布式模型预测控制(DMPC)就是这样一种全局视角的控制方案。它让每个机器人不仅关注自己,还要关心整个编队的形态与安全,就像是球队中的后卫,既要保护自己,又要防止对方得分。
DMPC的核心思路
- 状态预测:预判未来可能的动作结果。
- 优化选择:在可能的动作中选最优解。
- 局部决策:让每个智能体独立计算,但又全局最优。
DMPC在Matlab中的实现
% 初始化参数
n = 5; % 机器人数量
d_ref = [0 1]; % 各机器人到前车的期望距离
vel_ref = 1; % 参考速度
% 生成初始编队
for i = 1:n
pos_0(i,:) = [0 (i-1)*d_ref(2)];
v_0(i,:) = vel_ref * [cos(0), sin(0)];
end在这里,n代表机器人数量,d_ref是期望的间距。每个机器人的初始位置和速度通过简单的循环生成,形成了一条直线队伍。这种初始化简单直观,为后续的控制打下基础。
动态窗口避障算法:DWA的改进与融合
动态窗口避障算法(DWA)是经典避障算法之一,它基于速度选择,在允许的范围内寻找最优速度组合。然而,DWA也有其不足之处,比如在面对动态障碍物时不够灵活。因此,我们决定对DWA进行改进,增强其避障能力。
DWA的改进方向
- 增加障碍物搜索角:让机器人更全面地感知周围环境。
- 改进评价函数:增加轨迹平滑性的考量,减少急转弯。
- 融合速度障碍法(VO):增强动态避障效果。
速度障碍法(VO)的原理
VO的核心思想是通过预测障碍物的轨迹,计算出机器人速度的不可行区域,从而选择避开这些区域的速度。这种方法不仅考虑了静态障碍物,还能实时应对动态障碍物的变化。
VO在Matlab中的实现
% 计算速度障碍
function [vx, vy] = vo(pose, obstacle, robot_radius)
[x, y, theta] = deal(pose(1), pose(2), pose(3));
obs_x = obstacle(:,1);
obs_y = obstacle(:,2);
obs_vx = obstacle(:,3);
obs_vy = obstacle(:,4);
obs_radius = obstacle(:,5);
% 预测障碍物的轨迹
for i = 1:length(obs_x)
rel_x = obs_x(i) - x;
rel_y = obs_y(i) - y;
rel_vx = obs_vx(i);
rel_vy = obs_vy(i);
dist = hypot(rel_x, rel_y);
if dist < 2 * (robot_radius + obs_radius(i))
% 计算速度障碍
max_speed = 1;
min_speed = -1;
angle = atan2(rel_y, rel_x);
...
end
end
end在代码中,首先预测障碍物的轨迹,然后根据相对位置和速度计算可允许的速度区域。VO通过动态规划,确保机器人不会与障碍物发生碰撞。
融合DWA与VO:取长补短
融合DWA与VO的思路是:用DWA的实时速度选择能力,结合VO的安全速度区域,实现更高效的避障。这种结合不仅保留了DWA的实时性,还增强了避障的安全性。
融合方法
- 速度区域限制:先使用VO计算出安全速度区域。
- 速度组合选择:在DWA中选择满足VO条件的速度组合。
- 评价函数优化:综合距离目标、速度平滑性和路径安全性,选择最优速度。
融合后评价函数的改进
改进后的评价函数不仅仅是寻找最近的路径,还考虑了路径的平滑性和安全性:
% 改进的评价函数
function cost = improved_cost(pos, target, obstacles, robot_radius, vel, dt)
% 计算到目标点的距离
dist_to_target = norm(pos(1:2) - target(1:2));
% 预测下一步位置
next_pos = pos + vel * dt;
% 计算与障碍物的碰撞风险
collision_risk = collision_risk_eval(next_pos, obstacles, robot_radius, dt);
% 综合评价
cost = dist_to_target + collision_risk + (vel(1)^2 + vel(2)^2)/10;
end新的评价函数不仅考虑了距离目标的距离,还加入了碰撞风险评估和速度平滑性的惩罚项,使得路径选择更加全面。
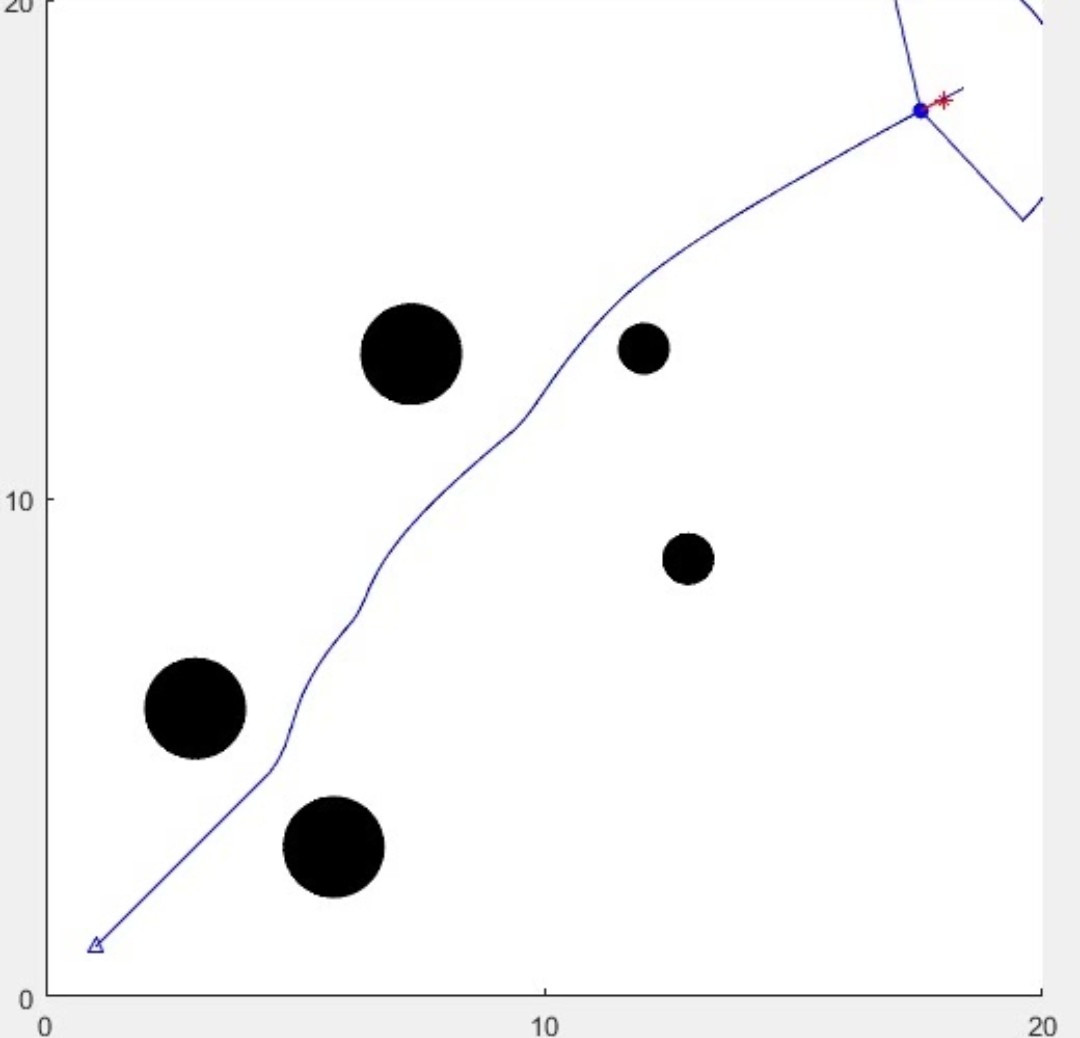
动态参数调节:让场景更灵活
在实际应用中,地图参数的可调节性非常重要。通过调整地图大小、障碍物位置、速度和半径,可以更好地适应不同的研究需求。
参数调节的实现
% 地图大小
map_size = [100 100];
% 障碍物参数
obstacle_num = 5;
obstacle_radius = 1;
obstacle_speed = 0.5;
% 设置障碍物位置和速度
for i = 1:obstacle_num
obstacles(i, :) = [map_size(1)*rand(), map_size(2)*rand(), (randn()*obstacle_speed), (randn()*obstacle_speed), obstacle_radius];
end通过随机生成障碍物的位置和速度,我们可以模拟复杂动态环境中的避障问题。这使得仿真实验更加真实,也为算法的验证提供了丰富的场景。
结语
通过改进的DWA和融合VO的方法,我们成功实现了多智能体在动态环境中的协同编队控制。这种方法不仅提升了编队控制的效率,还增强了避障的安全性。未来,我们可以通过调整更多的参数和优化算法,进一步提升编队控制的效果,让机器人的协同工作更加智能和顺畅。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 17
17 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)