探索二阶多智能体领导跟随动态静态一致性
二阶多智能体领导跟随动态静态一致性。在多智能体系统的研究领域,二阶多智能体领导跟随动态静态一致性是一个相当有趣且实用的方向。它涉及到多个智能体如何在相互协作的过程中,跟随领导者并达成某种一致性状态,无论是在动态运行还是静态稳定的场景下。想象一下,一群无人机编队飞行,其中有一个领导者无人机,其他无人机要跟随它的轨迹并保持特定的队形。这就需要各个无人机(智能体)之间通过信息交互,不断调整自身的速度和位
二阶多智能体领导跟随动态静态一致性。
在多智能体系统的研究领域,二阶多智能体领导跟随动态静态一致性是一个相当有趣且实用的方向。它涉及到多个智能体如何在相互协作的过程中,跟随领导者并达成某种一致性状态,无论是在动态运行还是静态稳定的场景下。
想象一下,一群无人机编队飞行,其中有一个领导者无人机,其他无人机要跟随它的轨迹并保持特定的队形。这就需要各个无人机(智能体)之间通过信息交互,不断调整自身的速度和位置,以实现整体的一致性。
基本原理简述
从数学模型角度看,对于每个智能体 \(i\),我们可以定义其位置 \(xi\) 和速度 \(vi\)。领导者智能体的位置和速度分别用 \(x0\) 和 \(v0\) 表示。为了让智能体 \(i\) 跟随领导者,我们通常会构建如下的控制律。
假设每个智能体之间的信息交互通过一个图 \(G=(V, E)\) 来描述,其中 \(V\) 是节点集合(对应智能体),\(E\) 是边集合(对应智能体之间的通信连接)。邻居节点集合用 \(N_i\) 表示。
对于位置的更新,我们可以有类似这样的公式:
\[ \dot{x}i = vi + \sum{j \in Ni} a{ij} (xj - xi) + bi (x0 - xi) \]
这里 \(a{ij}\) 是图 \(G\) 的邻接矩阵元素,表示智能体 \(i\) 和 \(j\) 之间的连接权重,\(bi\) 则是智能体 \(i\) 对领导者的跟随权重。
速度的更新公式可以是:
\[ \dot{v}i = \sum{j \in Ni} a{ij} (vj - vi) + bi (v0 - v_i) \]
从直观上理解,位置更新公式中,\(vi\) 是自身速度,\(\sum{j \in Ni} a{ij} (xj - xi)\) 是与邻居智能体位置差异的调整项,\(bi (x0 - x_i)\) 是向领导者位置靠拢的项。速度更新公式同理。
代码示例(以Python为例)
import numpy as np
import matplotlib.pyplot as plt
# 定义智能体数量和时间步长
num_agents = 5
dt = 0.01
T = 10
time_steps = int(T / dt)
# 初始化位置和速度
x = np.random.rand(num_agents, 2)
v = np.random.rand(num_agents, 2)
# 定义邻接矩阵和跟随权重
A = np.array([[0, 1, 1, 0, 0],
[1, 0, 0, 1, 0],
[1, 0, 0, 0, 1],
[0, 1, 0, 0, 1],
[0, 0, 1, 1, 0]])
b = np.array([0.1, 0.1, 0.1, 0.1, 0.1])
# 领导者位置和速度
x0 = np.array([5, 5])
v0 = np.array([0, 0])
# 记录位置轨迹
x_trajectory = np.zeros((time_steps, num_agents, 2))
for t in range(time_steps):
# 位置更新
x_dot = v + np.dot(A, x - x[:, np.newaxis]) + b[:, np.newaxis] * (x0 - x)
# 速度更新
v_dot = np.dot(A, v - v[:, np.newaxis]) + b[:, np.newaxis] * (v0 - v)
x = x + x_dot * dt
v = v + v_dot * dt
x_trajectory[t] = x
# 绘制轨迹
for i in range(num_agents):
plt.plot(x_trajectory[:, i, 0], x_trajectory[:, i, 1], label=f'Agent {i}')
plt.scatter(x0[0], x0[1], color='red', label='Leader')
plt.legend()
plt.xlabel('X position')
plt.ylabel('Y position')
plt.title('Second - order Multi - agent Leader - following Trajectories')
plt.show()代码分析
- 初始化部分:
- 我们首先定义了智能体的数量numagents和时间步长dt,以及总模拟时间T,并根据这些计算出总的时间步数timesteps。
- 然后随机初始化每个智能体的位置x和速度v,它们都是二维数组,因为这里假设智能体在二维平面上运动。
- 接着定义邻接矩阵A,它描述了智能体之间的连接关系。例如A[0, 1] = 1表示智能体0和智能体1之间有连接。跟随权重b定义了每个智能体对领导者的跟随强度。
- 最后设定领导者的位置x0和速度v0。
- 循环更新部分:
- 在每个时间步中,我们根据前面提到的位置和速度更新公式进行计算。xdot和vdot分别是位置和速度的导数,通过矩阵运算实现了与邻居智能体以及领导者的信息交互。
- 然后根据导数和时间步长dt更新智能体的位置x和速度v。
- 每次更新后,将当前位置记录到x_trajectory中,以便后续绘图。
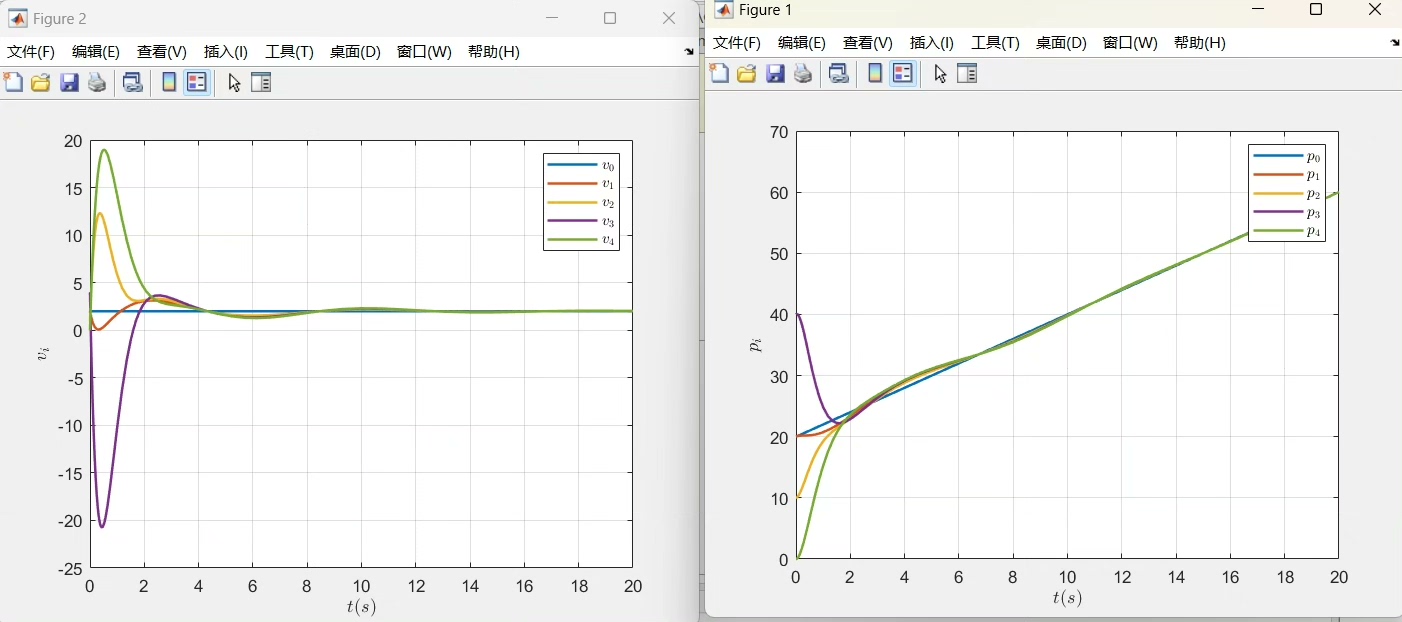
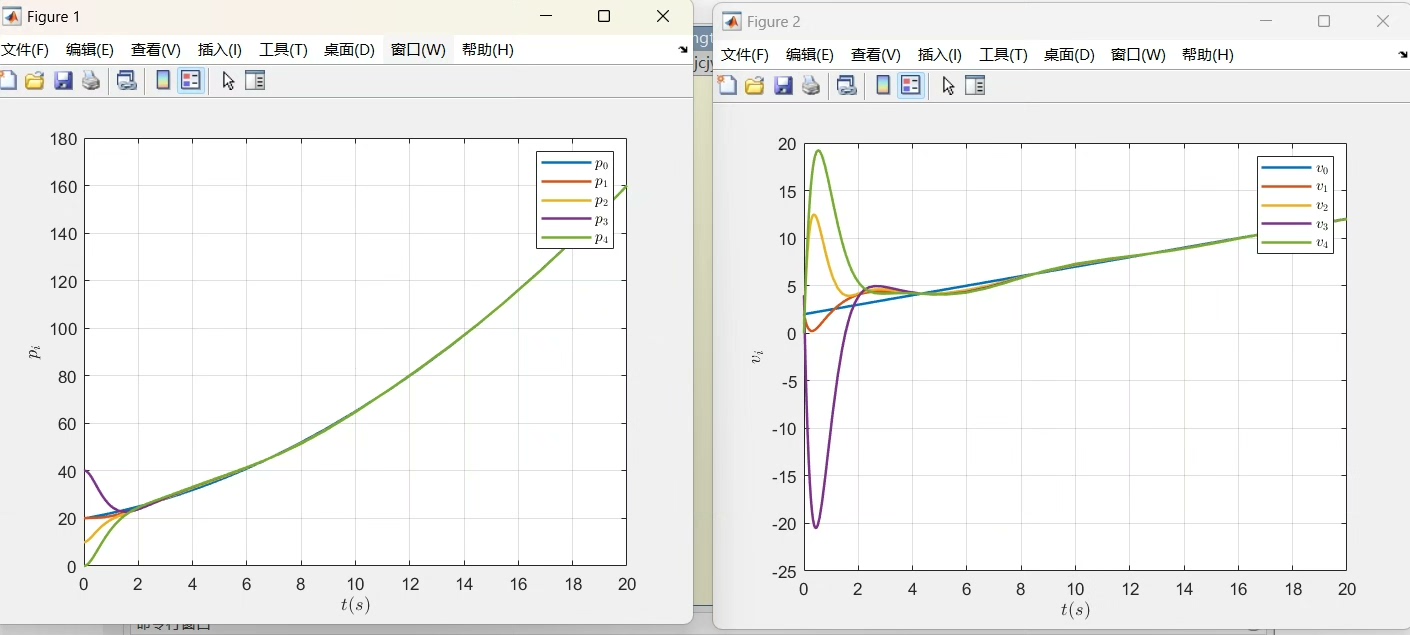
- 绘图部分:
- 最后,通过遍历每个智能体的位置轨迹并使用matplotlib库进行绘图,同时绘制出领导者的位置,直观展示智能体跟随领导者的过程。
通过这样的代码实现,我们可以直观地观察到二阶多智能体系统如何在领导跟随机制下达成动态和静态的一致性。在实际应用中,这种一致性算法在机器人协作、自动驾驶车队等领域都有着巨大的潜力,能够让多个自主个体协同工作,完成复杂任务。
二阶多智能体领导跟随动态静态一致性的研究不断推进,未来有望在更多复杂场景中发挥重要作用,为智能系统的协同运作提供更高效、稳定的解决方案。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 19
19 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)