基于蛇优化器(SO)的无人机路径规划探索
基于蛇优化器(Snake Optimizer,SO)的无人机路径规划该优化算法是一篇SCI一区论文 具有良好的实际应用和改进意义。一键运行main函数自动保存高质量图片!1、蛇优化器摘要:近年来,一些元启发式算法被引入工程和科学领域,用于解决现实生活中的优化问题。提出了一种新的基于自然启发的元启发式算法——蛇优化器(Snake Optimizer, SO),以模拟蛇的特殊交配行为来解决一系列优化任
基于蛇优化器(Snake Optimizer,SO)的无人机路径规划 该优化算法是一篇SCI一区论文 具有良好的实际应用和改进意义。 一键运行main函数自动保存高质量图片! 1、蛇优化器 摘要:近年来,一些元启发式算法被引入工程和科学领域,用于解决现实生活中的优化问题。 提出了一种新的基于自然启发的元启发式算法——蛇优化器(Snake Optimizer, SO),以模拟蛇的特殊交配行为来解决一系列优化任务。 如果食物充足且温度较低,每条蛇(雄性/雌性)都会为找到最佳伴侣而战斗。 该研究从数学上模拟和建模这种觅食和繁殖的行为和模式,提出一种简单有效的优化算法。 为了验证所提方法的有效性和优越性,在29个无约束进化计算国会(Congress on Evolutionary Computation, CEC) 2017基准测试函数和4个有约束的实际工程问题上进行了测试。 与线性种群规模减少-成功-历史自适应差分进化(L-SHADE)、集成正弦与L-SHADE相结合(LSHADE-EpSin)、协方差矩阵自适应进化策略(CMAES)、Coyote优化算法(COA)、飞蛾火焰优化、哈里斯鹰优化、热交换优化、蝗虫优化算法和鲸鱼优化算法等9种著名的新开发算法进行了比较。 实验结果和统计对比验证了SO在不同景观上探索-利用平衡度和收敛曲线速度方面的有效性和高效性。 参考文献:Snake Optimizer: A novel meta-heuristic optimization algorithm Doi: 10.1016/j.knosys.2022.108320 2、无人机路径规划 一般无人机路径规划的目标是找到一条满足特定约束条件的路径,例如考虑避障、最短路径、最优路径等。 而优化算法的应用可以帮助无人机在考虑这些约束条件的情况下,寻找到最优或者接近最优的路径。 实验结果如下
在工程和科学领域,元启发式算法近年来逐渐崭露头角,成为解决现实优化问题的得力工具。今天咱就来聊聊基于蛇优化器(Snake Optimizer, SO)的无人机路径规划,这可是源自一篇 SCI 一区论文的算法,实际应用潜力巨大且具备改进意义,文末还会告诉你一键运行 main 函数就能自动保存高质量图片的小惊喜哦!
一、蛇优化器(SO)
1.1 算法灵感与原理
最近几年,各种元启发式算法不断涌现。这里要讲的蛇优化器,是模拟蛇特殊的交配行为来解决一系列优化任务的。想象一下,当食物充足且温度较低时,每条蛇(不管是雄性还是雌性)都会为了找到最佳伴侣而“大打出手”。研究人员从数学角度模拟和建模这种觅食与繁殖行为模式,进而提出了这么一个简单有效的优化算法。
从代码角度来理解,假设我们用 Python 来实现这个算法的简单框架(当然实际完整实现要复杂得多):
# 简单模拟蛇个体类
class Snake:
def __init__(self, position):
self.position = position
self.fitness = None
def evaluate_fitness(self, problem):
# 这里根据具体问题评估蛇个体的适应度
self.fitness = problem.evaluate(self.position)
# 假设的问题类
class Problem:
def __init__(self):
pass
def evaluate(self, position):
# 实际问题评估逻辑,这里简单返回位置的某个指标
return sum(position)
# 初始化蛇群
def initialize_snake_population(population_size, problem_dimension):
snakes = []
for _ in range(population_size):
position = [0] * problem_dimension
snake = Snake(position)
snakes.append(snake)
return snakes
这里 Snake 类代表蛇个体,每个个体有自己的位置和适应度,evaluatefitness 方法用来评估适应度。Problem 类模拟实际要解决的问题,evaluate 方法根据蛇的位置给出适应度值。initializesnake_population 函数则是初始化蛇群。
1.2 算法验证
为了验证蛇优化器(SO)的有效性和优越性,研究人员在 29 个无约束进化计算国会(CEC 2017)基准测试函数以及 4 个有约束的实际工程问题上进行了测试。并且与线性种群规模减少 - 成功 - 历史自适应差分进化(L - SHADE)、集成正弦与 L - SHADE 相结合(LSHADE - EpSin)、协方差矩阵自适应进化策略(CMAES)、Coyote 优化算法(COA)、飞蛾火焰优化、哈里斯鹰优化、热交换优化、蝗虫优化算法和鲸鱼优化算法等 9 种著名的新开发算法进行了比较。
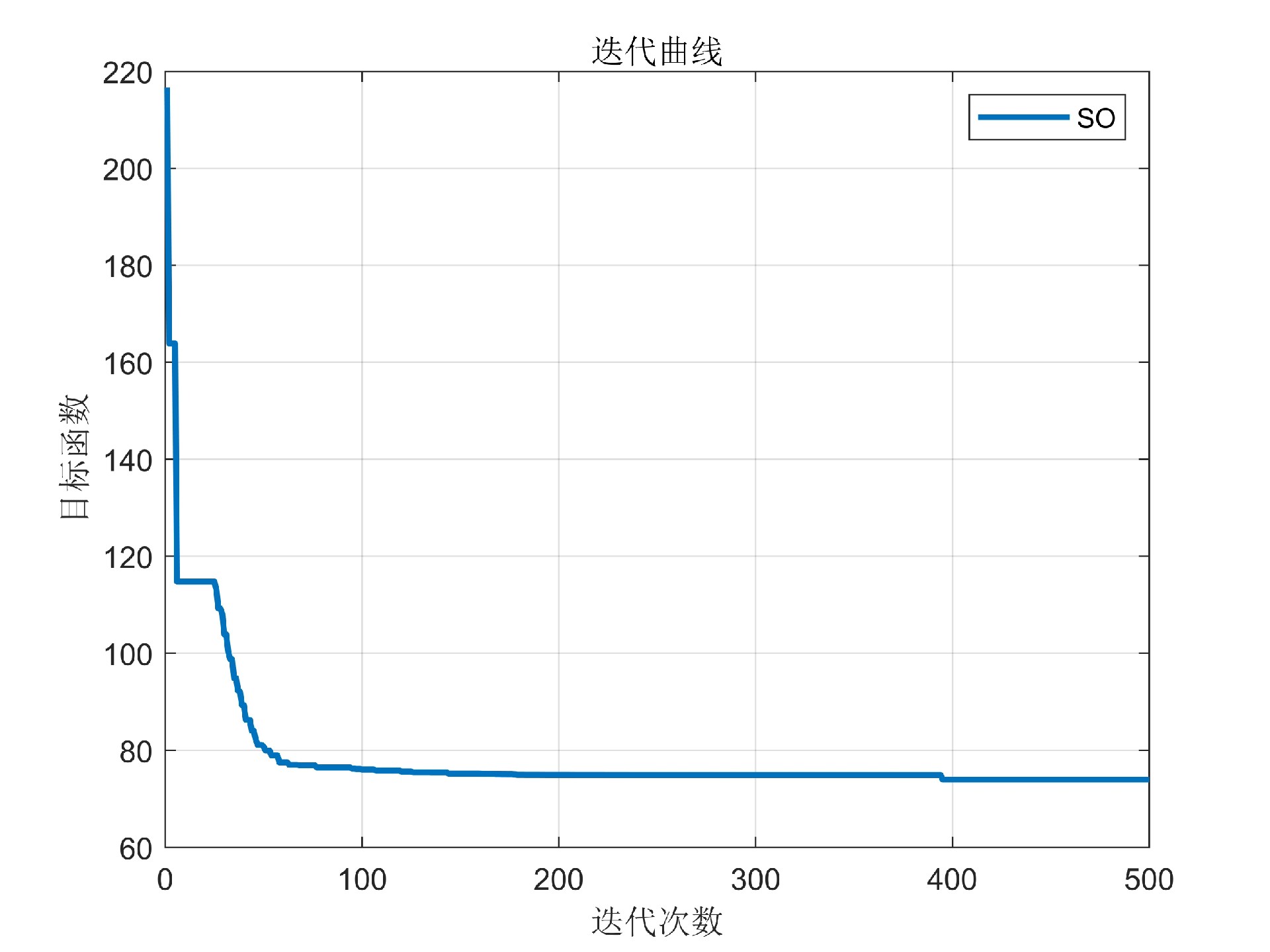
从实验结果和统计对比来看,SO 在不同景观上探索 - 利用平衡度和收敛曲线速度方面都展现出了有效性和高效性。这就好比在一场长跑比赛中,SO 既能保持稳定的探索“步伐”,又能在合适的时候加速“收敛”到最优解。
二、无人机路径规划
2.1 目标与约束
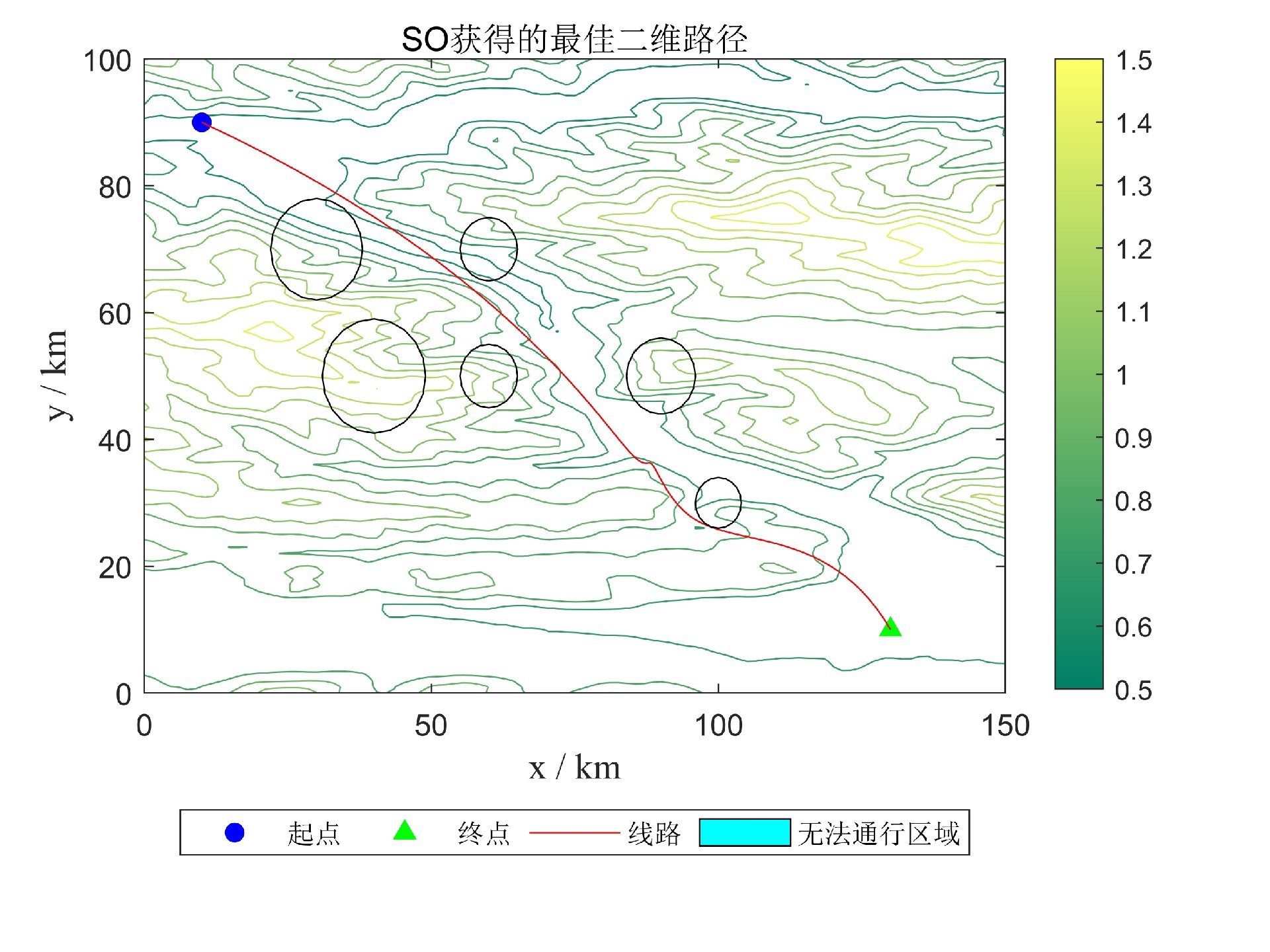
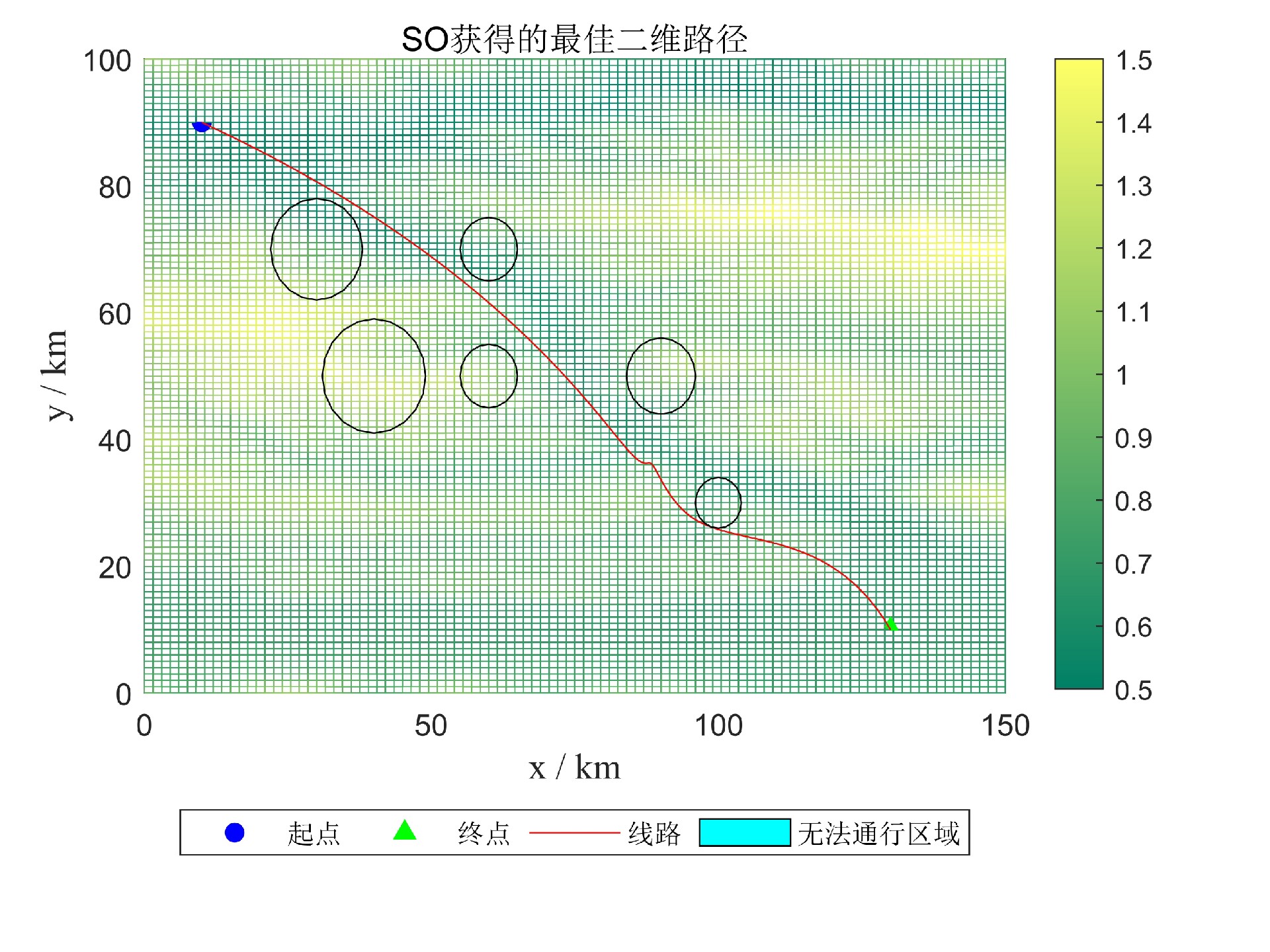
一般来说,无人机路径规划的目标是要找到一条满足特定约束条件的路径。比如说,要考虑如何避开障碍物,找到最短路径或者最优路径等。就像我们开车出门,既要避免撞到障碍物,又想走最近的路一样。
2.2 蛇优化器的应用
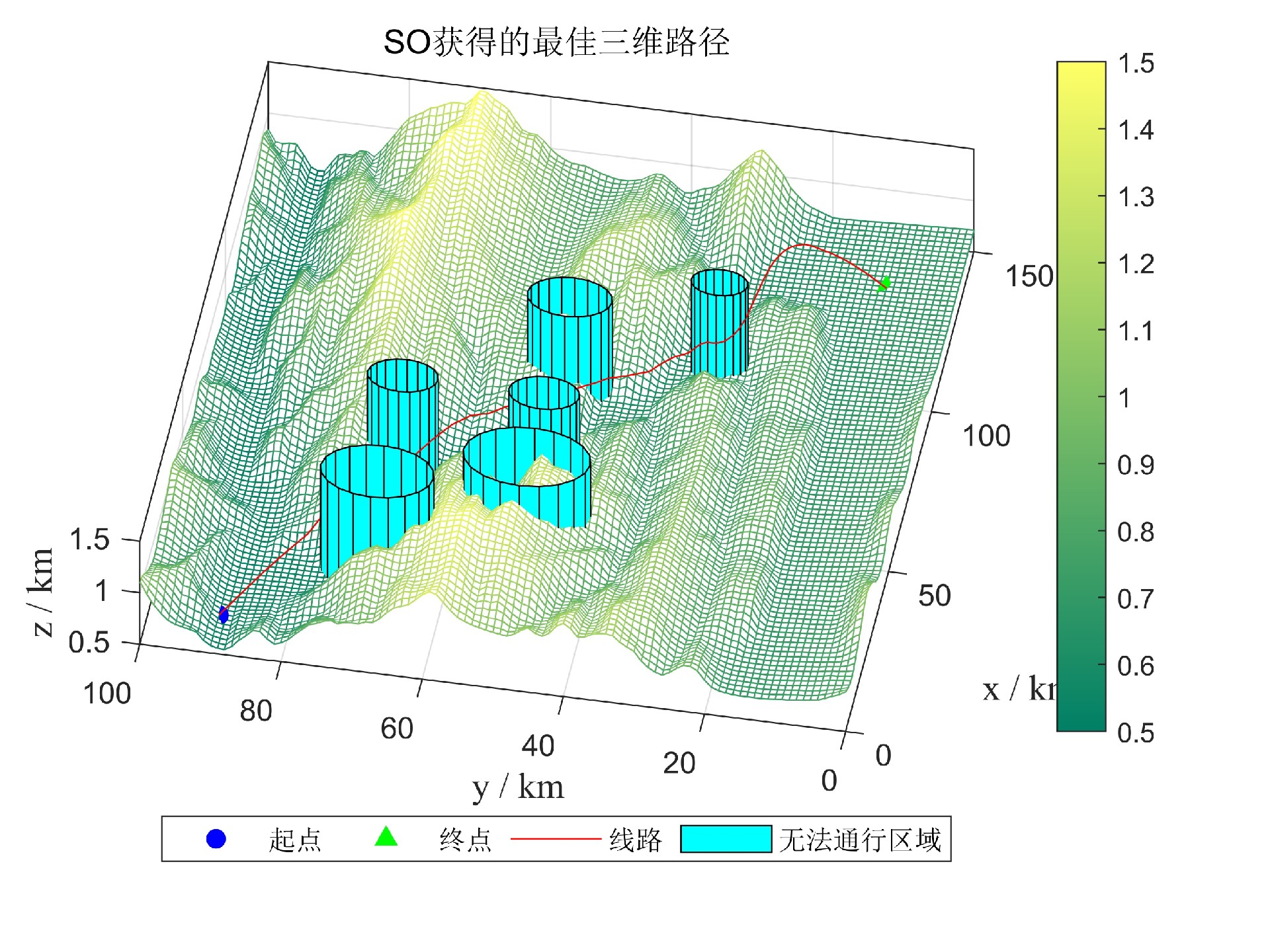
蛇优化器在无人机路径规划中就派上用场了。优化算法能够帮助无人机在考虑这些复杂约束条件的情况下,寻找到最优或者接近最优的路径。我们可以把无人机可能的路径想象成蛇的“位置”,通过蛇优化器不断调整这些“位置”,找到最佳路径。
假设在代码层面,我们要把蛇优化器应用到无人机路径规划,可能会有这样的逻辑(简化示例):
# 假设的无人机路径问题类,继承自前面的Problem类
class UAVPathProblem(Problem):
def __init__(self, obstacles):
self.obstacles = obstacles
super().__init__()
def evaluate(self, position):
# 这里position代表无人机路径,评估路径是否避开障碍物等逻辑
for obstacle in self.obstacles:
if is_collision(position, obstacle):
return float('inf')
# 如果没有碰撞,返回路径长度作为适应度
return calculate_path_length(position)
def is_collision(path, obstacle):
# 判断路径和障碍物是否碰撞的逻辑
pass
def calculate_path_length(path):
# 计算路径长度的逻辑
pass
这里 UAVPathProblem 类继承自 Problem 类,针对无人机路径规划的特点,在 evaluate 方法中增加了判断路径是否与障碍物碰撞以及计算路径长度等逻辑。
一键运行 main 函数自动保存高质量图片
最后要说的就是这个超方便的功能啦!只要一键运行 main 函数,就能自动保存高质量图片。在实际实现中,可能会用到如 matplotlib 等绘图库。
import matplotlib.pyplot as plt
def main():
# 执行蛇优化器相关计算得到结果
result_path = run_snake_optimizer_for_uav()
# 绘制路径图片
plt.plot([point[0] for point in result_path], [point[1] for point in result_path])
plt.xlabel('X - coordinate')
plt.ylabel('Y - coordinate')
plt.title('UAV Path Planned by Snake Optimizer')
# 保存图片
plt.savefig('uav_path_so.png', dpi = 300)
def run_snake_optimizer_for_uav():
# 实际运行蛇优化器解决无人机路径规划问题的逻辑
pass
if __name__ == '__main__':
main()
在 main 函数里,先运行蛇优化器得到无人机路径,然后用 matplotlib 绘制路径并保存为高质量图片。这样一来,我们就能直观地看到无人机规划出的路径啦。
总的来说,基于蛇优化器的无人机路径规划为无人机的高效飞行提供了一种新的思路和方法,感兴趣的小伙伴不妨深入研究研究。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)