Coarray Tensor Train Decomposition for Bistatic MIMO Radar With Uniform Planar Array (II)
然而,所提出的框架是针对具有特定配置的系统开发的,因此,它们不适用于具有任意平面阵列几何结构的双基地 MIMO 雷达系统。注意的是,我们的算法与广泛应用于双基地 MIMO 雷达 [21], [22], [23], [24] 和 MIMO 信道估计 [59], [60], [61] 中的 CPD 方法有着本质的区别。在图 5(a) 中,可以看出,包括所提方法和 TRD 在内的张量网络分解技术,相比于
文章目录
B. Factor Matrices Retrieval Using Type I Method
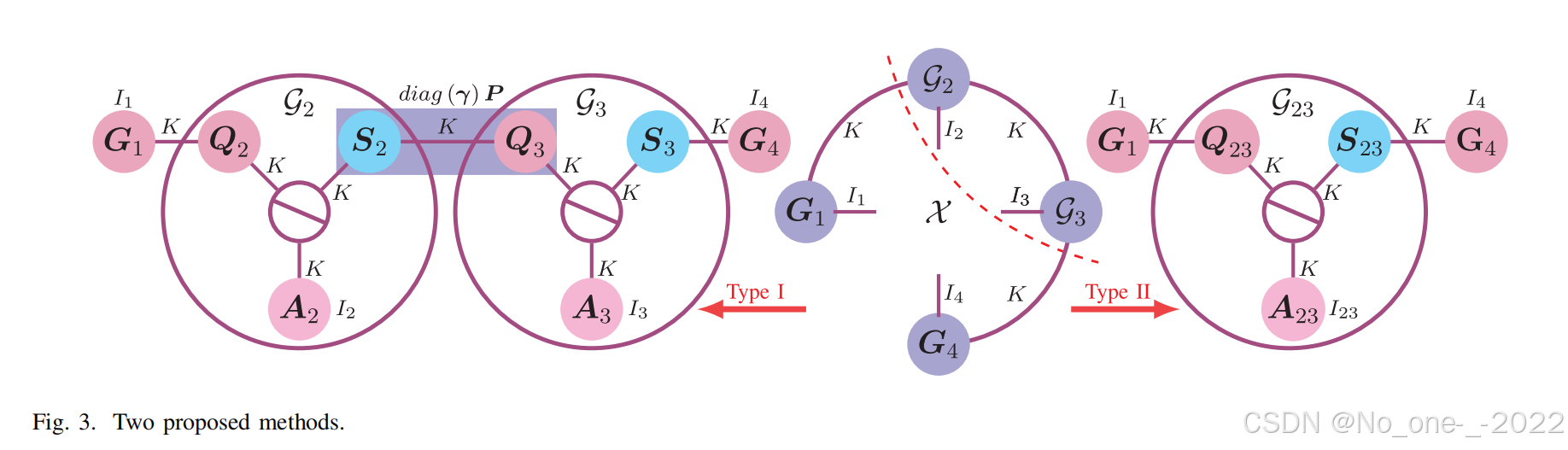
在图 3 所示的所提 Type I 方法中,TALS 算法被分别执行在 TT 核心因子 G 2 \mathcal{G}_2 G2 和 G 3 \mathcal{G}_3 G3 上,以估计范德蒙因子矩阵 A ^ tx \hat{\boldsymbol{A}}_{\text{tx}} A^tx、 A ^ ty \hat{\boldsymbol{A}}_{\text{ty}} A^ty、 A ^ rx \hat{\boldsymbol{A}}_{\text{rx}} A^rx 和 A ^ ry \hat{\boldsymbol{A}}_{\text{ry}} A^ry。这两个 TT 核心因子重构如下: G 2 = I 3 , K × 1 Q 2 × 2 A 2 × 3 S 2 (38a) \mathcal{G}_2 = \mathcal{I}_{3,K} \times_1 \boldsymbol{Q}_2 \times_2 \boldsymbol{A}_2 \times_3 \boldsymbol{S}_2 \tag{38a} G2=I3,K×1Q2×2A2×3S2(38a) G 3 = I 3 , K × 1 Q 3 × 2 A 3 × 3 S 3 (38b) \mathcal{G}_3 = \mathcal{I}_{3,K} \times_1 \boldsymbol{Q}_3 \times_2 \boldsymbol{A}_3 \times_3 \boldsymbol{S}_3 \tag{38b} G3=I3,K×1Q3×2A3×3S3(38b)其中 Q 2 , S 2 , Q 3 \boldsymbol{Q}_2, \boldsymbol{S}_2, \boldsymbol{Q}_3 Q2,S2,Q3 和 S 3 \boldsymbol{S}_3 S3 表示估计的非奇异 K × K K \times K K×K 矩阵; A 2 ∈ C I 2 × K \boldsymbol{A}_2 \in \mathbb{C}^{I_2 \times K} A2∈CI2×K 和 A 3 ∈ C I 3 × K \boldsymbol{A}_3 \in \mathbb{C}^{I_3 \times K} A3∈CI3×K 分别对应于估计的范德蒙因子矩阵 A ^ ty \hat{\boldsymbol{A}}_{\text{ty}} A^ty 和 A ^ rx \hat{\boldsymbol{A}}_{\text{rx}} A^rx。为了估计因子矩阵 Q 2 , S 2 , Q 3 , S 3 , A ^ ty \boldsymbol{Q}_2, \boldsymbol{S}_2, \boldsymbol{Q}_3, \boldsymbol{S}_3, \hat{\boldsymbol{A}}_{\text{ty}} Q2,S2,Q3,S3,A^ty 和 A ^ rx \hat{\boldsymbol{A}}_{\text{rx}} A^rx,优化问题建立如下:
{ Q 2 , A 2 , S 2 } = arg min Q 2 , A 2 , S 2 ∥ G 2 − [ [ Q 2 , A 2 , S 2 ] ] ∥ F 2 (39a) \{\boldsymbol{Q}_2, \boldsymbol{A}_2, \boldsymbol{S}_2\} = \underset{\boldsymbol{Q}_2, \boldsymbol{A}_2, \boldsymbol{S}_2}{\arg \min} \|\mathcal{G}_2 - [[\boldsymbol{Q}_2, \boldsymbol{A}_2, \boldsymbol{S}_2]]\|_F^2 \tag{39a} {Q2,A2,S2}=Q2,A2,S2argmin∥G2−[[Q2,A2,S2]]∥F2(39a) { Q 3 , A 3 , S 3 } = arg min Q 3 , A 3 , S 3 ∥ G 3 − [ [ Q 3 , A 3 , S 3 ] ] ∥ F 2 (39b) \{\boldsymbol{Q}_3, \boldsymbol{A}_3, \boldsymbol{S}_3\} = \underset{\boldsymbol{Q}_3, \boldsymbol{A}_3, \boldsymbol{S}_3}{\arg \min} \|\mathcal{G}_3 - [[\boldsymbol{Q}_3, \boldsymbol{A}_3, \boldsymbol{S}_3]]\|_F^2 \tag{39b} {Q3,A3,S3}=Q3,A3,S3argmin∥G3−[[Q3,A3,S3]]∥F2(39b)
为了简洁起见,本研究仅提供 G 2 \mathcal{G}_2 G2 的推导过程。 G 2 \mathcal{G}_2 G2 的模-1、模-2 和模-3 展开可以分别表示为
G 21 = G 2 ⟨ 1 ⟩ T = Q 2 ( S 2 ⊙ A 2 ) T (40a) \boldsymbol{G}_{21} = \mathcal{G}_{2\langle 1 \rangle}^T = \boldsymbol{Q}_2 (\boldsymbol{S}_2 \odot \boldsymbol{A}_2)^T \tag{40a} G21=G2⟨1⟩T=Q2(S2⊙A2)T(40a) G 22 = G 2 ⟨ 2 ⟩ T = A 2 ( S 2 ⊙ Q 2 ) T (40b) \boldsymbol{G}_{22} = \mathcal{G}_{2\langle 2 \rangle}^T = \boldsymbol{A}_2 (\boldsymbol{S}_2 \odot \boldsymbol{Q}_2)^T \tag{40b} G22=G2⟨2⟩T=A2(S2⊙Q2)T(40b) G 23 = G 2 ⟨ 3 ⟩ T = S 2 ( A 2 ⊙ Q 2 ) T (40c) \boldsymbol{G}_{23} = \mathcal{G}_{2\langle 3 \rangle}^T = \boldsymbol{S}_2 (\boldsymbol{A}_2 \odot \boldsymbol{Q}_2)^T \tag{40c} G23=G2⟨3⟩T=S2(A2⊙Q2)T(40c)
然后,因子矩阵 Q 2 , A 2 \boldsymbol{Q}_2, \boldsymbol{A}_2 Q2,A2 和 S 2 \boldsymbol{S}_2 S2 可以通过以下方式交替更新
Q 2 = arg min Q 2 ∥ G 21 − Q 2 ( S 2 ⊙ A 2 ) T ∥ F 2 (41a) \boldsymbol{Q}_2 = \underset{\boldsymbol{Q}_2}{\arg \min} \|\boldsymbol{G}_{21} - \boldsymbol{Q}_2 (\boldsymbol{S}_2 \odot \boldsymbol{A}_2)^T\|_F^2 \tag{41a} Q2=Q2argmin∥G21−Q2(S2⊙A2)T∥F2(41a) A 2 = arg min A 2 ∥ G 22 − A 2 ( S 2 ⊙ Q 2 ) T ∥ F 2 (41b) \boldsymbol{A}_2 = \underset{\boldsymbol{A}_2}{\arg \min} \|\boldsymbol{G}_{22} - \boldsymbol{A}_2 (\boldsymbol{S}_2 \odot \boldsymbol{Q}_2)^T\|_F^2 \tag{41b} A2=A2argmin∥G22−A2(S2⊙Q2)T∥F2(41b) S 2 = arg min S 2 ∥ G 23 − S 2 ( A 2 ⊙ Q 2 ) T ∥ F 2 (41c) \boldsymbol{S}_2 = \underset{\boldsymbol{S}_2}{\arg \min} \|\boldsymbol{G}_{23} - \boldsymbol{S}_2 (\boldsymbol{A}_2 \odot \boldsymbol{Q}_2)^T\|_F^2 \tag{41c} S2=S2argmin∥G23−S2(A2⊙Q2)T∥F2(41c)
最后, Q 2 , A 2 \boldsymbol{Q}_2, \boldsymbol{A}_2 Q2,A2 和 S 2 \boldsymbol{S}_2 S2 的最小二乘闭式解分别表示为 Q 2 = G 21 ( ( S 2 ⊙ A 2 ) T ) † (42a) \boldsymbol{Q}_2 = \boldsymbol{G}_{21} ((\boldsymbol{S}_2 \odot \boldsymbol{A}_2)^T)^{\dagger} \tag{42a} Q2=G21((S2⊙A2)T)†(42a) A 2 = G 22 ( ( S 2 ⊙ Q 2 ) T ) † (42b) \boldsymbol{A}_2 = \boldsymbol{G}_{22} ((\boldsymbol{S}_2 \odot \boldsymbol{Q}_2)^T)^{\dagger} \tag{42b} A2=G22((S2⊙Q2)T)†(42b) S 2 = G 23 ( ( A 2 ⊙ Q 2 ) T ) † (42c) \boldsymbol{S}_2 = \boldsymbol{G}_{23} ((\boldsymbol{A}_2 \odot \boldsymbol{Q}_2)^T)^{\dagger} \tag{42c} S2=G23((A2⊙Q2)T)†(42c)
此后(Afterward),估计的因子矩阵 Q 2 , A 2 \boldsymbol{Q}_2, \boldsymbol{A}_2 Q2,A2 和 S 2 \boldsymbol{S}_2 S2 是自动对齐的。同样地, G 3 \mathcal{G}_3 G3 中的因子矩阵 Q 3 , A 3 \boldsymbol{Q}_3, \boldsymbol{A}_3 Q3,A3 和 S 3 \boldsymbol{S}_3 S3 可以使用上述过程推导出来。根据 [19],TALS 在温和条件下(under mild conditions)满足本质唯一性约束。这意味着估计的矩阵 Q 2 , A 2 \boldsymbol{Q}_2, \boldsymbol{A}_2 Q2,A2 和 S 2 \boldsymbol{S}_2 S2 共享相同的列置换和缩放模糊性。因此,可以构建以下关系:
Q 2 = M 1 Π 2 Λ 2 , A 2 = A ^ ty Π 2 Λ 2 (43a) \boldsymbol{Q}_2 = \boldsymbol{M}_1 \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2, \quad \boldsymbol{A}_2 = \hat{\boldsymbol{A}}_{\text{ty}} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2 \tag{43a} Q2=M1Π2Λ2,A2=A^tyΠ2Λ2(43a) S 2 = M 2 − T Π 2 Λ 2 , Q 3 = M 2 Π 3 Λ 3 (43b) \boldsymbol{S}_2 = \boldsymbol{M}_2^{-T} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2, \quad \boldsymbol{Q}_3 = \boldsymbol{M}_2 \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3 \tag{43b} S2=M2−TΠ2Λ2,Q3=M2Π3Λ3(43b) A 3 = A ^ rx Π 3 Λ 3 , S 3 = M 3 − T Π 3 Λ 3 (43c) \boldsymbol{A}_3 = \hat{\boldsymbol{A}}_{\text{rx}} \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3, \quad \boldsymbol{S}_3 = \boldsymbol{M}_3^{-T} \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3 \tag{43c} A3=A^rxΠ3Λ3,S3=M3−TΠ3Λ3(43c)
在公式 (43a)-(43c) 中: Q 2 = M 1 Π 2 Λ 2 , A 2 = A ^ ty Π 2 Λ 2 \boldsymbol{Q}_2 = \boldsymbol{M}_1 \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2, \quad \boldsymbol{A}_2 = \hat{\boldsymbol{A}}_{\text{ty}} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2 Q2=M1Π2Λ2,A2=A^tyΠ2Λ2作者这里使用的符号 Λ 2 \boldsymbol{\Lambda}_2 Λ2 可能是一种通用的表示法,意指“某种对角缩放矩阵”,而并不一定代表 Q 2 \boldsymbol{Q}_2 Q2 和 A 2 \boldsymbol{A}_2 A2 乘以的是数值完全相同的对角阵。在严格的数学推导中,通常会写成 Λ Q \boldsymbol{\Lambda}_{\boldsymbol{Q}} ΛQ、 Λ A \boldsymbol{\Lambda}_{\boldsymbol{A}} ΛA、 Λ S \boldsymbol{\Lambda}_{\boldsymbol{S}} ΛS,并满足 Λ Q Λ A Λ S = I \boldsymbol{\Lambda}_{\boldsymbol{Q}}\boldsymbol{\Lambda}_{\boldsymbol{A}}\boldsymbol{\Lambda}_{\boldsymbol{S}} = \mathbf{I} ΛQΛAΛS=I。
其中 Π 2 \boldsymbol{\Pi}_2 Π2 和 Π 3 \boldsymbol{\Pi}_3 Π3 是列置换矩阵, Λ 2 \boldsymbol{\Lambda}_2 Λ2 和 Λ 3 \boldsymbol{\Lambda}_3 Λ3 是对角缩放矩阵。可以看出,在估计的 A 2 \boldsymbol{A}_2 A2 和 A 3 \boldsymbol{A}_3 A3 矩阵中,列元素的顺序和缩放是不同的,这会导致在 (35b) 中配对 G 1 \boldsymbol{G}_1 G1 和 G 4 \boldsymbol{G}_4 G4 时失败。此外, G 1 , A 2 , A 3 \boldsymbol{G}_1, \boldsymbol{A}_2, \boldsymbol{A}_3 G1,A2,A3 和 G 4 \boldsymbol{G}_4 G4 之间固有的模糊性在估计的 2D-DOD 和 2D-DOA 值中引入了任意排序。为了解决这些模糊性,本研究引入了引理 1。
引理 1:存在于估计的因子矩阵 A 2 \boldsymbol{A}_2 A2 和 A 3 \boldsymbol{A}_3 A3 中的列置换模糊性可以使用 S 2 T Q 3 \boldsymbol{S}_2^T \boldsymbol{Q}_3 S2TQ3 的主元素进行修正。
证明:基于 (43c),积 S 2 T Q 3 \boldsymbol{S}_2^T \boldsymbol{Q}_3 S2TQ3 可以表示为 S 2 T Q 3 = 1 ( M 2 − T Π 2 Λ 2 ) T M 2 Π 3 Λ 3 = 2 Λ 2 T Π 2 T M 2 − 1 M 2 Π 3 Λ 3 = 3 Λ 2 Π 2 T Π 3 Λ 3 = 4 Π 2 T Λ 2 Λ 3 Π 2 Π 2 T Π 3 = 5 diag ( γ ) P (44) \begin{aligned} \boldsymbol{S}_2^T \boldsymbol{Q}_3 &\overset{1}{=} (\boldsymbol{M}_2^{-T} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_2)^T \boldsymbol{M}_2 \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3 \\ &\overset{2}{=} \boldsymbol{\Lambda}_2^T \boldsymbol{\Pi}_2^T \boldsymbol{M}_2^{-1} \boldsymbol{M}_2 \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3 \\ &\overset{3}{=} \boldsymbol{\Lambda}_2 \boldsymbol{\Pi}_2^T \boldsymbol{\Pi}_3 \boldsymbol{\Lambda}_3 \overset{4}{=} \boldsymbol{\Pi}_2^T \boldsymbol{\Lambda}_2 \boldsymbol{\Lambda}_3 \boldsymbol{\Pi}_2 \boldsymbol{\Pi}_2^T \boldsymbol{\Pi}_3 \\ &\overset{5}{=} \text{diag}(\boldsymbol{\gamma}) \boldsymbol{P} \end{aligned} \tag{44} S2TQ3=1(M2−TΠ2Λ2)TM2Π3Λ3=2Λ2TΠ2TM2−1M2Π3Λ3=3Λ2Π2TΠ3Λ3=4Π2TΛ2Λ3Π2Π2TΠ3=5diag(γ)P(44)其中 diag ( γ ) = Π 2 T Λ 2 Λ 3 Π 2 ∈ C K × K \text{diag}(\boldsymbol{\gamma}) = \boldsymbol{\Pi}_2^T \boldsymbol{\Lambda}_2 \boldsymbol{\Lambda}_3 \boldsymbol{\Pi}_2 \in \mathbb{C}^{K \times K} diag(γ)=Π2TΛ2Λ3Π2∈CK×K 表示主元素对角矩阵, P = Π 2 T Π 3 ∈ C K × K \boldsymbol{P} = \boldsymbol{\Pi}_2^T \boldsymbol{\Pi}_3 \in \mathbb{C}^{K \times K} P=Π2TΠ3∈CK×K 表示置换矩阵。
在本研究中,使用了两个小技巧来推导 = 2 \overset{2}{=} =2 到 = 3 \overset{3}{=} =3 以及 = 3 \overset{3}{=} =3 到 = 4 \overset{4}{=} =4;即,对角缩放矩阵 Λ 2 \boldsymbol{\Lambda}_2 Λ2 和列置换矩阵 Π 2 \boldsymbol{\Pi}_2 Π2 分别满足 Λ 2 = Λ 2 T \boldsymbol{\Lambda}_2 = \boldsymbol{\Lambda}_2^T Λ2=Λ2T 和 Π 2 Π 2 T = I K \boldsymbol{\Pi}_2\boldsymbol{\Pi}_2^T = \boldsymbol{I}_K Π2Π2T=IK 的条件。通过计算 S 2 T Q 3 \boldsymbol{S}_2^T \boldsymbol{Q}_3 S2TQ3 中的主元素及其索引,可以获得 γ \boldsymbol{\gamma} γ 和 P \boldsymbol{P} P。定义一个新矩阵 Q ^ 3 = Q 3 P T diag ( 1 K ⊘ γ ) \hat{\boldsymbol{Q}}_3 = \boldsymbol{Q}_3\boldsymbol{P}^T \text{diag}(\boldsymbol{1}_K \oslash \boldsymbol{\gamma}) Q^3=Q3PTdiag(1K⊘γ);那么,可以建立以下关系:
S 2 T Q ^ 3 = S 2 T Q 3 P T diag ( 1 K ⊘ γ ) = I K . (45) \boldsymbol{S}_2^T \hat{\boldsymbol{Q}}_3 = \boldsymbol{S}_2^T \boldsymbol{Q}_3 \boldsymbol{P}^T \text{diag}(\boldsymbol{1}_K \oslash \boldsymbol{\gamma}) = \boldsymbol{I}_K. \tag{45} S2TQ^3=S2TQ3PTdiag(1K⊘γ)=IK.(45)
随后,估计的因子矩阵 A 3 \boldsymbol{A}_3 A3 和 S 3 \boldsymbol{S}_3 S3 可以修正如下:
A ^ 3 = A 3 P T diag ( γ ) = A ^ rx Π 2 Λ 3 2 Λ 2 (46a) \hat{\boldsymbol{A}}_3 = \boldsymbol{A}_3 \boldsymbol{P}^T \text{diag}(\boldsymbol{\gamma}) = \hat{\boldsymbol{A}}_{\text{rx}} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_3^2 \boldsymbol{\Lambda}_2 \tag{46a} A^3=A3PTdiag(γ)=A^rxΠ2Λ32Λ2(46a) S ^ 3 = S 3 P T = M 3 − T Π 2 Λ 3 . (46b) \hat{\boldsymbol{S}}_3 = \boldsymbol{S}_3 \boldsymbol{P}^T = \boldsymbol{M}_3^{-T} \boldsymbol{\Pi}_2 \boldsymbol{\Lambda}_3. \tag{46b} S^3=S3PT=M3−TΠ2Λ3.(46b)
这意味着 A ^ 3 \hat{\boldsymbol{A}}_3 A^3 具有与 A 2 \boldsymbol{A}_2 A2 相同的列顺序。在本研究中,缩放模糊性没有被消除,因为这种模糊性不影响 2D-DOD 和 2D-DOA 的估计。至此,引理 1 得证。
此外,为了确保与 G 1 \boldsymbol{G}_1 G1 和 G 4 \boldsymbol{G}_4 G4 相关的列置换矩阵的唯一性,本研究定义 G ^ 1 \hat{\boldsymbol{G}}_1 G^1 和 G ^ 4 \hat{\boldsymbol{G}}_4 G^4 如下:
G ^ 1 = G 1 Q 2 = A ^ tx V Π 2 Λ 2 (47a) \hat{\boldsymbol{G}}_1 = \boldsymbol{G}_1\boldsymbol{Q}_2 = \hat{\boldsymbol{A}}_{\text{tx}}\boldsymbol{V}\boldsymbol{\Pi}_2\boldsymbol{\Lambda}_2 \tag{47a} G^1=G1Q2=A^txVΠ2Λ2(47a) G ^ 4 = P S 3 T G 4 = Λ 3 Π 2 T A ^ ry T . (47b) \hat{\boldsymbol{G}}_4 = \boldsymbol{P}\boldsymbol{S}_3^T\boldsymbol{G}_4 = \boldsymbol{\Lambda}_3\boldsymbol{\Pi}_2^T\hat{\boldsymbol{A}}_{\text{ry}}^T. \tag{47b} G^4=PS3TG4=Λ3Π2TA^ryT.(47b)
相应地,由 A ^ tx , A ^ ty , A ^ rx \hat{\boldsymbol{A}}_{\text{tx}}, \hat{\boldsymbol{A}}_{\text{ty}}, \hat{\boldsymbol{A}}_{\text{rx}} A^tx,A^ty,A^rx 和 A ^ ry \hat{\boldsymbol{A}}_{\text{ry}} A^ry 表示的范德蒙因子矩阵可以表示为
A ^ 1 = G ^ 1 = A ^ tx V Π 2 Λ 2 (48a) \hat{\boldsymbol{A}}_1 = \hat{\boldsymbol{G}}_1 = \hat{\boldsymbol{A}}_{\text{tx}}\boldsymbol{V}\boldsymbol{\Pi}_2\boldsymbol{\Lambda}_2 \tag{48a} A^1=G^1=A^txVΠ2Λ2(48a) A ^ 2 = A 2 = A ^ ty Π 2 Λ 2 (48b) \hat{\boldsymbol{A}}_2 = \boldsymbol{A}_2 = \hat{\boldsymbol{A}}_{\text{ty}}\boldsymbol{\Pi}_2\boldsymbol{\Lambda}_2 \tag{48b} A^2=A2=A^tyΠ2Λ2(48b) A ^ 3 = A 3 P T diag ( γ ) = A ^ rx Π 2 Λ 3 2 Λ 2 (48c) \hat{\boldsymbol{A}}_3 = \boldsymbol{A}_3\boldsymbol{P}^T\text{diag}(\boldsymbol{\gamma}) = \hat{\boldsymbol{A}}_{\text{rx}}\boldsymbol{\Pi}_2\boldsymbol{\Lambda}_3^2\boldsymbol{\Lambda}_2 \tag{48c} A^3=A3PTdiag(γ)=A^rxΠ2Λ32Λ2(48c) A ^ 4 = G ^ 4 T = A ^ ry Π 2 Λ 3 . (48d) \hat{\boldsymbol{A}}_4 = \hat{\boldsymbol{G}}_4^T = \hat{\boldsymbol{A}}_{\text{ry}}\boldsymbol{\Pi}_2\boldsymbol{\Lambda}_3. \tag{48d} A^4=G^4T=A^ryΠ2Λ3.(48d)
由于矩阵 A ^ 1 , A ^ 2 , A ^ 3 \hat{\boldsymbol{A}}_1, \hat{\boldsymbol{A}}_2, \hat{\boldsymbol{A}}_3 A^1,A^2,A^3 和 A ^ 4 \hat{\boldsymbol{A}}_4 A^4 共享一个公共的列置换矩阵 Π 2 \boldsymbol{\Pi}_2 Π2,它们的列顺序与原始范德蒙因子矩阵 A ^ tx , A ^ ty , A ^ rx \hat{\boldsymbol{A}}_{\text{tx}}, \hat{\boldsymbol{A}}_{\text{ty}}, \hat{\boldsymbol{A}}_{\text{rx}} A^tx,A^ty,A^rx 和 A ^ ry \hat{\boldsymbol{A}}_{\text{ry}} A^ry 的列顺序对齐。因此,恢复的矩阵 A ^ tx , A ^ ty , A ^ rx \hat{\boldsymbol{A}}_{\text{tx}}, \hat{\boldsymbol{A}}_{\text{ty}}, \hat{\boldsymbol{A}}_{\text{rx}} A^tx,A^ty,A^rx 和 A ^ ry \hat{\boldsymbol{A}}_{\text{ry}} A^ry 中固有的列模糊性被消除。
C. Application Scenarios of Proposed Methods
本文提出的两种方法侧重于利用 UPA 几何结构的双基地 MIMO 雷达系统中的 2D-DOD 和 2D-DOA 估计。近年来,在阵列信号处理领域,各种稀疏平面阵列 (SPA) 配置已被开发用于角度参数估计。与 UPA 相比,SPA 提供了增强的自由度 (DOF) 并减少了互耦 (MC) [52], [53], [54]。两种最显著的 SPA 配置——嵌套平面阵列 (NPAs) [55], [56] 和互质平面阵列 (CPAs) [57], [58]——在文献中受到了广泛关注。
值得注意的是,所提出的方法也可以适配于采用 SPA 几何结构的双基地 MIMO 雷达系统。然而,为了保持简洁,此处省略了对该扩展的详细分析,并将在我们正在进行的调查中作为未来研究的一部分进行探讨。此外,这两种提出的方法在先进的天线配置原理与电磁波传播机制之间展现出了强大的协同作用。另外,这两个开发的框架为解决现代天线系统设计领域的关键挑战提供了可扩展性,包括与大规模 MIMO 阵列、共形天线结构以及多频段和超宽带 (UWB) 辐射单元相关的挑战。然而,所提出的框架是针对具有特定配置的系统开发的,因此,它们不适用于具有任意平面阵列几何结构的双基地 MIMO 雷达系统。
D. Analysis of the Proposed Methods
本文提出的两种方法在两个关键方面有所不同。
首先,在计算复杂度方面,
- Type I 方法由于依赖双重 TALS 迭代,表现出显著更高的复杂度。
- 相比之下,Type II 方法通过单次迭代实现达到了更高的效率。这种差异主要源于 Type I 中额外的迭代过程。
其次,关于参数估计精度,
- 仿真结果表明 Type II 算法在较小的高阶张量上实现了更高的精度,
- 而 Type I 算法在处理大规模、高维张量时表现更好。值得
注意的是,我们的算法与广泛应用于双基地 MIMO 雷达 [21], [22], [23], [24] 和 MIMO 信道估计 [59], [60], [61] 中的 CPD 方法有着本质的区别。传统的 CPD 及其变体方法主要解决三阶张量模型,而我们基于 TTD 的框架为高阶张量分解提供了优化解决方案。理论分析和实验验证均表明,TTD 算法在高维区域表现出优越的收敛特性和估计精度。因此,对于三阶张量应用,我们推荐使用 CPD,而 TTD 更适用于高阶张量参数估计(四阶或以上)。
V. REMARKS
实验 2:在该实验中,检查了所提的两种方法在不同 SNR 值下的性能。如图 5 所示,与其他张量分解方法(包括 CPD、TD 和 TRD 方法)相比,所提的 Type I 和 Type II 方法表现出更低的 RMSE 值。
在图 5(a) 中,可以看出,包括所提方法和 TRD 在内的张量网络分解技术,相比于 CPD 和 TD 方法能够实现更优越的误差性能。这种改进可归因于张量网络分解在表征高维张量结构中内在相关性方面的增强能力。
This improvement could be attributed to the enhanced capability of the tensor network decomposition in characterizing intrinsic correlations in high-dimensional tensor structures.
此外,所提方法相对于 TRD 方法的性能优势源于基本的算法差异(fundamental algorithmic differences);即,
-
TRD 方法在角度参数估计过程中依赖于旋转不变特性,
-
而所提方法则通过因子矩阵分析直接提取角度信息。
成功检测概率 (PSD) 对 SNR 的关系展示在图 5(b) 中,PSD 值通过 PSD = D / 200 × 100 % \text{PSD} = D/200 \times 100\% PSD=D/200×100% 计算,其中 D D D 是绝对角度估计误差低于 0. 5 ∘ 0.5^{\circ} 0.5∘ 的试验次数。值得注意的是,所提方法能够在低 SNR 条件下保持鲁棒的检测性能,展示了与现有方法相比更优越的抗噪能力。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)