多智能体系统一致性仿真:Matlab 实现探索
多智能体系统一致性仿真Matlab仿真代码主要包括:1.二阶无领导2.二阶一领导四跟随3.一般线性有领导4.一般线性无领导5.一阶有领导6.一阶无领导在多智能体系统的研究领域,一致性问题一直是核心关注点之一。通过 Matlab 进行仿真,可以直观地观察和分析多智能体系统如何达成一致性。接下来,咱们就详细看看不同场景下的多智能体系统一致性仿真代码及其背后的逻辑。
多智能体系统一致性仿真 Matlab仿真代码 主要包括: 1.二阶无领导 2.二阶一领导四跟随 3.一般线性有领导 4.一般线性无领导 5.一阶有领导 6.一阶无领导
在多智能体系统的研究领域,一致性问题一直是核心关注点之一。通过 Matlab 进行仿真,可以直观地观察和分析多智能体系统如何达成一致性。接下来,咱们就详细看看不同场景下的多智能体系统一致性仿真代码及其背后的逻辑。
1. 二阶无领导
% 二阶无领导多智能体系统一致性仿真
n = 5; % 智能体数量
A = [0 1 1 0 0;
1 0 0 1 0;
0 0 0 1 1;
0 1 1 0 1;
0 0 1 1 0]; % 邻接矩阵
L = diag(sum(A, 2)) - A; % 拉普拉斯矩阵
dt = 0.01; % 时间步长
T = 10; % 仿真总时间
t = 0:dt:T; % 时间向量
x = zeros(n, length(t)); % 位置状态初始化
v = zeros(n, length(t)); % 速度状态初始化
x(:, 1) = randn(n, 1); % 初始位置随机化
v(:, 1) = randn(n, 1); % 初始速度随机化
for k = 1:length(t)-1
x(:, k + 1) = x(:, k) + v(:, k) * dt;
v(:, k + 1) = v(:, k) - dt * L * x(:, k);
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
xlabel('时间 t');
ylabel('位置 x');
title('二阶无领导多智能体系统位置一致性');这段代码里,首先定义了智能体的数量 n 以及邻接矩阵 A 来描述智能体之间的连接关系。通过邻接矩阵生成拉普拉斯矩阵 L,这在多智能体系统分析中是关键步骤,拉普拉斯矩阵体现了图的拓扑结构对智能体间相互作用的影响。时间步长 dt 和总仿真时间 T 设定了仿真的时间参数。状态变量 x 和 v 分别表示位置和速度,初始值随机化。在循环中,根据二阶动力学模型更新位置和速度,最后绘制出各智能体位置随时间的变化曲线。
2. 二阶一领导四跟随
% 二阶一领导四跟随多智能体系统一致性仿真
n = 4; % 跟随者数量
m = 1; % 领导者数量
A = [0 1 1 0;
1 0 0 1;
0 0 0 1;
0 1 1 0]; % 跟随者间邻接矩阵
B = [1 0 0 0;
0 1 0 0;
0 0 1 0;
0 0 0 1]; % 领导者与跟随者连接矩阵
L = diag(sum(A, 2)) - A; % 跟随者拉普拉斯矩阵
dt = 0.01;
T = 10;
t = 0:dt:T;
x = zeros(n, length(t));
v = zeros(n, length(t));
x(:, 1) = randn(n, 1);
v(:, 1) = randn(n, 1);
x_leader = zeros(m, length(t));
v_leader = zeros(m, length(t));
x_leader(:, 1) = randn(m, 1);
v_leader(:, 1) = randn(m, 1);
for k = 1:length(t)-1
x(:, k + 1) = x(:, k) + v(:, k) * dt;
v(:, k + 1) = v(:, k) - dt * (L * x(:, k) + B * (x_leader(:, k) - x(:, k)));
x_leader(:, k + 1) = x_leader(:, k) + v_leader(:, k) * dt;
v_leader(:, k + 1) = v_leader(:, k);
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
plot(t, x_leader(1, :), 'r--');
xlabel('时间 t');
ylabel('位置 x');
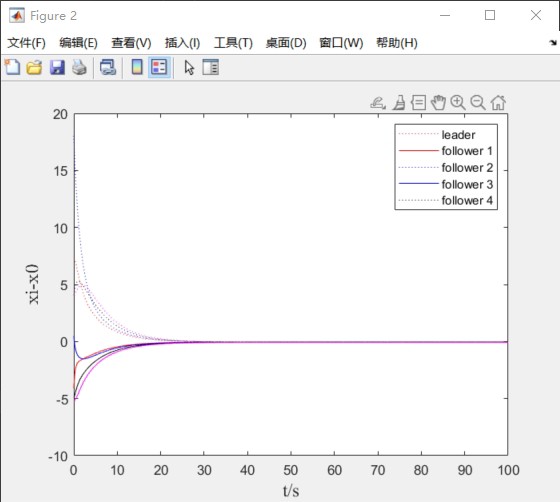
title('二阶一领导四跟随多智能体系统位置一致性');这里与二阶无领导有所不同,区分了领导者和跟随者。定义了跟随者数量 n 和领导者数量 m,分别构建了跟随者间的邻接矩阵 A 以及领导者与跟随者的连接矩阵 B。同样生成跟随者的拉普拉斯矩阵 L。状态变量除了跟随者的位置 x 和速度 v,还增加了领导者的位置 xleader 和速度 vleader。在更新速度时,除了考虑跟随者之间的相互作用(由 L x(:, k) 体现),还加入了领导者的影响 B (x_leader(:, k) - x(:, k)),这样跟随者就会朝着领导者的方向调整自己的状态,最后绘图展示跟随者和领导者的位置变化。
3. 一般线性有领导
% 一般线性有领导多智能体系统一致性仿真
n = 3; % 智能体数量
m = 1; % 领导者数量
A = [0 1 0;
1 0 1;
0 1 0];
B = [1 0 0;
0 1 0;
0 0 1];
C = [1 0 0;
0 1 0;
0 0 1];
D = [0; 0; 0];
E = [1 0 0;
0 1 0;
0 0 1];
F = [0; 0; 0];
G = [1 0 0;
0 1 0;
0 0 1];
H = [0; 0; 0];
dt = 0.01;
T = 10;
t = 0:dt:T;
x = zeros(n, length(t));
u = zeros(n, length(t));
x(:, 1) = randn(n, 1);
x_leader = zeros(m, length(t));
u_leader = zeros(m, length(t));
x_leader(:, 1) = randn(m, 1);
for k = 1:length(t)-1
u(:, k) = -C * x(:, k) + E * x_leader(:, k);
x(:, k + 1) = A * x(:, k) + B * u(:, k) + D;
u_leader(:, k) = 0;
x_leader(:, k + 1) = G * x_leader(:, k) + H;
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
plot(t, x_leader(1, :), 'r--');
xlabel('时间 t');
ylabel('状态 x');
title('一般线性有领导多智能体系统状态一致性');在一般线性有领导的场景中,定义了更多的系统矩阵 A、B、C、D、E、F、G、H 来描述系统的线性动力学特性。状态变量 x 表示智能体状态,u 为控制输入。同样区分了领导者和智能体,通过计算控制输入 u 来更新智能体状态 x 和领导者状态 xleader。这里的控制输入不仅依赖于智能体自身状态 C x(:, k),还与领导者状态有关 E xleader(:, k),体现了领导者对智能体的引导作用,最终绘图展示状态一致性。
4. 一般线性无领导
% 一般线性无领导多智能体系统一致性仿真
n = 4;
A = [0 1 1 0;
1 0 0 1;
0 0 0 1;
0 1 1 0];
L = diag(sum(A, 2)) - A;
C = [1 0 0 0;
0 1 0 0;
0 0 1 0;
0 0 0 1];
dt = 0.01;
T = 10;
t = 0:dt:T;
x = zeros(n, length(t));
u = zeros(n, length(t));
x(:, 1) = randn(n, 1);
for k = 1:length(t)-1
u(:, k) = -C * L * x(:, k);
x(:, k + 1) = A * x(:, k) + B * u(:, k);
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
xlabel('时间 t');
ylabel('状态 x');
title('一般线性无领导多智能体系统状态一致性');无领导情况下,重点通过邻接矩阵生成拉普拉斯矩阵 L。控制输入 u 的计算主要基于拉普拉斯矩阵和智能体状态 x,u(:, k) = -C L x(:, k),这使得智能体之间基于它们的连接关系和状态来调整自己的状态,从而试图达成一致性,最后绘制各智能体状态随时间的变化图。
5. 一阶有领导
% 一阶有领导多智能体系统一致性仿真
n = 4;
m = 1;
A = [0 1 1 0;
1 0 0 1;
0 0 0 1;
0 1 1 0];
B = [1 0 0 0;
0 1 0 0;
0 0 1 0;
0 0 0 1];
dt = 0.01;
T = 10;
t = 0:dt:T;
x = zeros(n, length(t));
x(:, 1) = randn(n, 1);
x_leader = zeros(m, length(t));
x_leader(:, 1) = randn(m, 1);
for k = 1:length(t)-1
x(:, k + 1) = x(:, k) + dt * (-A * x(:, k) + B * (x_leader(:, k) - x(:, k)));
x_leader(:, k + 1) = x_leader(:, k);
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
plot(t, x_leader(1, :), 'r--');
xlabel('时间 t');
ylabel('位置 x');
title('一阶有领导多智能体系统位置一致性');一阶有领导的仿真相对简洁,仅考虑位置状态 x。通过邻接矩阵 A 和连接矩阵 B,在每次迭代中更新智能体位置,更新公式 x(:, k + 1) = x(:, k) + dt (-A x(:, k) + B * (x_leader(:, k) - x(:, k))) 体现了智能体之间的相互作用以及对领导者的跟随,最终绘图展示智能体和领导者位置随时间的变化。
6. 一阶无领导
% 一阶无领导多智能体系统一致性仿真
n = 5;
A = [0 1 1 0 0;
1 0 0 1 0;
0 0 0 1 1;
0 1 1 0 1;
0 0 1 1 0];
L = diag(sum(A, 2)) - A;
dt = 0.01;
T = 10;
t = 0:dt:T;
x = zeros(n, length(t));
x(:, 1) = randn(n, 1);
for k = 1:length(t)-1
x(:, k + 1) = x(:, k) - dt * L * x(:, k);
end
figure;
for i = 1:n
plot(t, x(i, :));
hold on;
end
xlabel('时间 t');
ylabel('位置 x');
title('一阶无领导多智能体系统位置一致性');一阶无领导场景下,利用拉普拉斯矩阵 L 来更新智能体位置 x,x(:, k + 1) = x(:, k) - dt L x(:, k),智能体依据它们之间的连接结构(由拉普拉斯矩阵反映)来调整位置,逐渐趋向一致性,绘图展示位置随时间的变化过程。
通过这些不同场景的 Matlab 仿真代码,我们可以深入理解多智能体系统在不同条件下达成一致性的过程和原理,为进一步研究和应用多智能体系统提供了有力的支持。


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 18
18 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)