多智能体系统中基于事件触发的一致性算法及Matlab仿真探索
多智能体 事件触发 一致性 算法 matlab仿真有附参考文献在多智能体系统的研究领域,一致性问题一直是一个核心的话题。想象一下,一群无人机在执行任务时,需要保持特定的编队飞行,这就涉及到多智能体之间如何达成状态的一致性。而事件触发机制的引入,为解决一致性问题带来了新的思路和优化方向。
多智能体 事件触发 一致性 算法 matlab仿真 有附参考文献
在多智能体系统的研究领域,一致性问题一直是一个核心的话题。想象一下,一群无人机在执行任务时,需要保持特定的编队飞行,这就涉及到多智能体之间如何达成状态的一致性。而事件触发机制的引入,为解决一致性问题带来了新的思路和优化方向。
事件触发机制为何重要
传统的时间触发控制方式,按照固定的时间间隔对系统进行采样和控制,这在很多场景下会造成资源的浪费。比如,对于一些状态变化较为缓慢的智能体,频繁的采样和控制更新可能并没有必要。而事件触发机制则是基于系统状态的变化情况来决定是否进行控制更新,只有当某些特定的“事件”发生时,才会触发控制动作,这样大大减少了不必要的信息传输和计算,提升了系统的效率。
一致性算法解析
以一个简单的多智能体一致性算法为例,假设我们有 \(n\) 个智能体,每个智能体 \(i\) 的状态可以用 \(xi\) 表示。一致性算法的目标就是让所有智能体的状态 \(xi\) 最终趋于一致。
常见的一致性算法公式可以表示为:
\[ \dot{x}i = \sum{j \in Ni} a{ij}(xj - xi) \]
这里 \(Ni\) 表示智能体 \(i\) 的邻居集合,\(a{ij}\) 是连接智能体 \(i\) 和 \(j\) 的边的权重。简单来说,每个智能体根据它与邻居智能体状态的差异来调整自己的状态,最终实现所有智能体状态的一致。
Matlab 代码实现
% 参数设置
n = 10; % 智能体数量
tspan = 0:0.01:10; % 时间范围
x0 = randn(n,1); % 初始状态
% 定义图的邻接矩阵
A = zeros(n,n);
% 这里简单构建一个全连接图的邻接矩阵示例
for i = 1:n
for j = 1:n
if i ~= j
A(i,j) = 1;
end
end
end
% 定义一致性算法的微分方程
odefun = @(t,x) sum(A.*(repmat(x,[n,1]) - repmat(x',[1,n])),2);
% 求解微分方程
[xsol,tsol] = ode45(odefun,tspan,x0);
% 绘图
figure;
for i = 1:n
plot(tsol,xsol(:,i));
hold on;
end
xlabel('时间 t');
ylabel('智能体状态 x');
title('多智能体一致性算法仿真');
legend(strcat('智能体',num2str((1:n)')));代码分析
- 参数设置部分:
- 首先定义了n为智能体的数量,这里设置为10个。tspan定义了仿真的时间范围,从0到10秒,步长为0.01秒。x0使用randn函数随机生成每个智能体的初始状态。 - 邻接矩阵构建部分:
- 邻接矩阵A用于描述智能体之间的连接关系。这里简单构建了一个全连接图的邻接矩阵,即每个智能体都与其他所有智能体相连。在实际应用中,图的结构可能更加复杂,需要根据具体的场景来构建。 - 微分方程定义部分:
-odefun函数定义了一致性算法对应的微分方程。通过sum函数对邻居智能体与自身状态的差异进行求和,从而得到每个智能体状态的变化率。 - 求解与绘图部分:
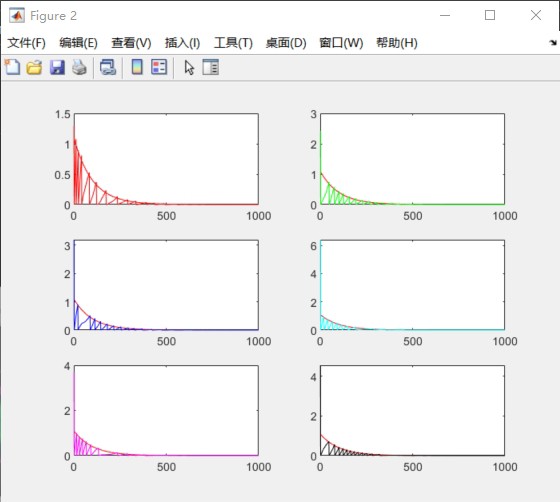
- 使用ode45函数求解微分方程,得到每个智能体在不同时间点的状态。最后通过绘图函数,将每个智能体的状态随时间的变化绘制出来,可以直观地看到多智能体系统逐渐达成一致性的过程。
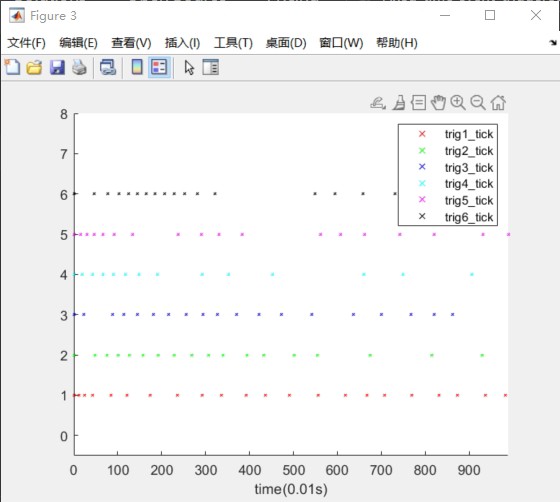
加入事件触发机制的扩展
在上述基础上加入事件触发机制会稍微复杂一些。我们需要定义一个事件触发条件,例如:
\[ ei^2 = \| xi - \hat{x}_i \|^2 > \theta \]
这里 \(ei\) 是智能体 \(i\) 的触发误差,\(\hat{x}i\) 是智能体 \(i\) 上一次触发时的状态,\(\theta\) 是一个预先设定的阈值。只有当触发误差大于阈值时,才会触发更新。
Matlab 代码实现这部分会需要更多的逻辑来跟踪每个智能体的触发时刻和触发状态,大致框架如下:
% 参数设置
n = 10;
tspan = 0:0.01:10;
x0 = randn(n,1);
A = zeros(n,n);
% 构建全连接图邻接矩阵
for i = 1:n
for j = 1:n
if i ~= j
A(i,j) = 1;
end
end
end
theta = 0.01; % 触发阈值
last_trigger_time = zeros(n,1); % 记录每个智能体上次触发时间
last_trigger_state = x0; % 记录每个智能体上次触发状态
odefun_event = @(t,x) [sum(A.*(repmat(last_trigger_state,[n,1]) - repmat(x',[1,n])),2);...
(sqrt(sum((x - last_trigger_state).^2,2)) - theta)];
options = odeset('Events',odefun_event);
[xsol_event,tsol_event,te,ye,ie] = ode45(odefun_event,tspan,x0,options);
% 绘图
figure;
for i = 1:n
plot(tsol_event,xsol_event(:,i));
hold on;
end
xlabel('时间 t');
ylabel('智能体状态 x');
title('基于事件触发的多智能体一致性算法仿真');
legend(strcat('智能体',num2str((1:n)')));代码分析
- 新增参数部分:
- 定义了theta作为触发阈值,同时初始化lasttriggertime和lasttriggerstate分别用于记录每个智能体上次触发的时间和状态。 - 微分方程与事件函数合并部分:
-odefunevent函数不仅包含了一致性算法的微分方程部分,还添加了事件触发条件的判断。当sqrt(sum((x - lasttrigger_state).^2,2)) - theta大于0时,就表示事件触发条件满足。 - 求解与绘图部分:
- 使用odeset函数设置事件函数,并通过ode45求解包含事件触发机制的微分方程。最后同样通过绘图展示基于事件触发的多智能体一致性过程。
通过上述对多智能体系统中基于事件触发的一致性算法的探讨以及Matlab仿真实现,我们可以看到事件触发机制在提升多智能体系统效率方面的潜力,同时也感受到Matlab在多智能体系统仿真研究中的强大工具作用。当然,实际应用中的多智能体系统可能会更加复杂,需要进一步深入研究和优化算法及仿真模型。
参考文献:[具体参考文献内容,可根据实际参考文献详细罗列]

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 32
32 0
0- 0



 已为社区贡献36条内容
已为社区贡献36条内容

所有评论(0)