Cyber 复现:线性多智能体的动态事件触发分布式控制探索
动态事件触发机制和分布式控制协议在解决定向通信网络的线性多智能体系统一致性问题上,就像是一对默契的搭档。动态事件触发机制有效地避免了不必要的频繁通信和计算,而分布式控制协议则保证了智能体之间能够合理地交互信息,逐步实现一致性。在未来的研究和应用中,这两者的进一步优化和结合,有望在诸如智能交通、分布式机器人协作等众多领域发挥更大的作用。希望通过今天的分享,大家对这个有趣的领域有了更深入的了解,一起期
Cyber 复现:线性多智能体 动态事件触发 分布式控制 定向通信网络的线性多智能体系统的一致性问题,动态事件触发机制,布式控制协议,动态事件触发机制可以延长任意两个连续触发时刻之间的最小事件间隔时间,并且没有agent表现出Zeno行为
在多智能体系统的研究领域,一致性问题一直是一个核心关注点。特别是在定向通信网络的线性多智能体系统中,如何高效地实现一致性,成为众多研究者不断探索的方向。今天咱们就来聊聊动态事件触发机制在这其中的奇妙作用以及相关的分布式控制协议。
线性多智能体系统一致性问题背景
想象一下,一群智能体在一个定向通信网络中,它们各自有自己的状态信息,就好比一群人,每个人都有自己手头的工作进度。我们希望这群智能体最终能达到一种“一致”的状态,类似于所有人都能同步工作进度,一起完成整个项目。这就是线性多智能体系统一致性问题的通俗解释。
动态事件触发机制的魅力
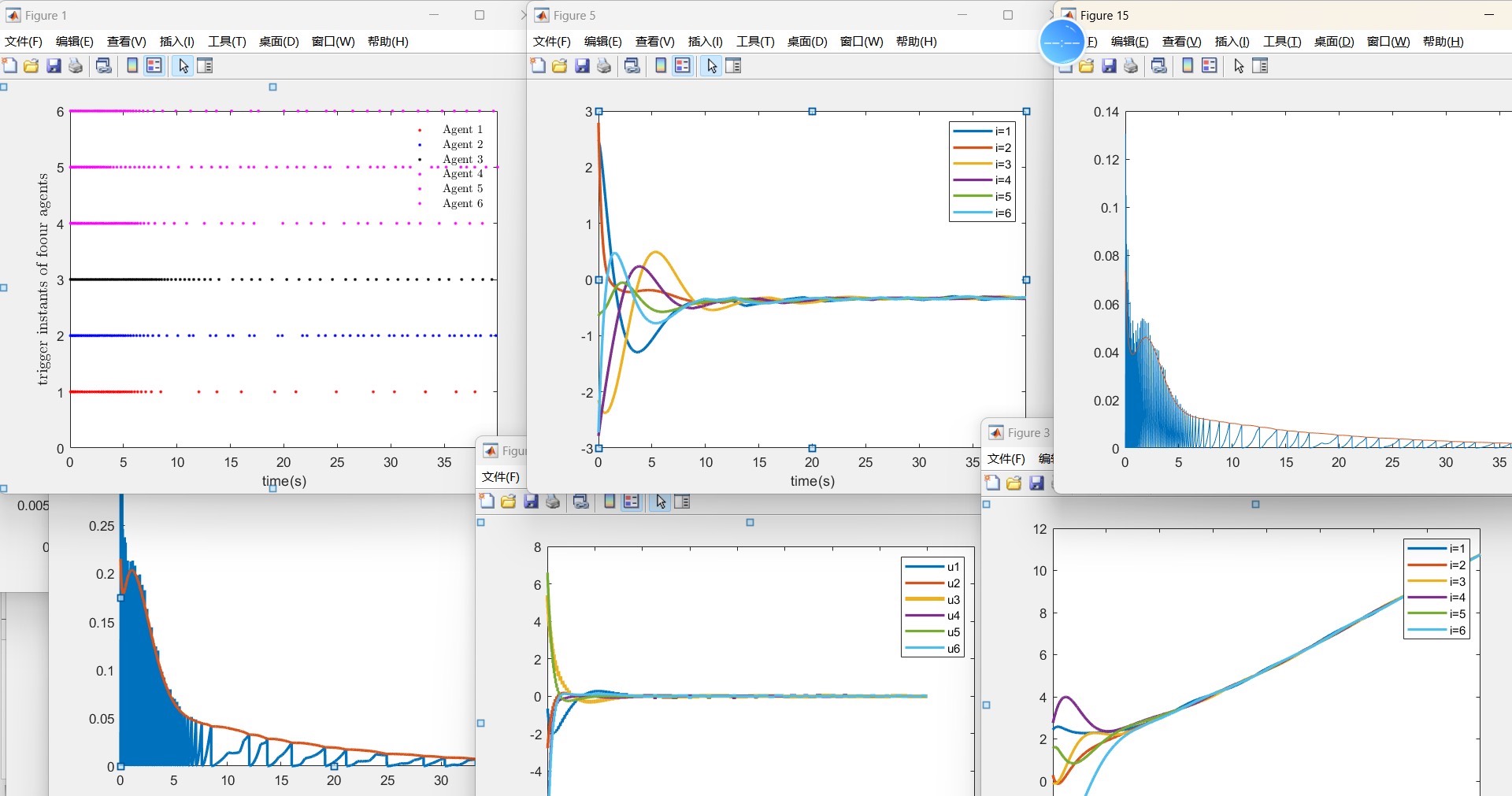
动态事件触发机制的出现,为解决这个问题带来了新的思路。它最大的亮点在于能够延长任意两个连续触发时刻之间的最小事件间隔时间。这意味着什么呢?打个比方,就像我们给智能体设定了一个“偷懒”机制,但这个偷懒是有节制的,它不会让智能体无休止地闲着,也就是不会出现 Zeno 行为(一种理论上触发过于频繁,在有限时间内触发无穷多次的不合理行为)。
下面咱们用一段简单的伪代码来模拟一下动态事件触发机制的大致逻辑:
# 假设我们有一个智能体类
class Agent:
def __init__(self, id):
self.id = id
self.state = 0 # 智能体的初始状态
self.last_trigger_time = 0
self.min_event_interval = 1 # 最小事件间隔时间
def check_event(self, current_time):
# 这里简单假设当状态变化超过一定阈值触发事件
if abs(self.state - self.last_state) > 0.5:
if current_time - self.last_trigger_time >= self.min_event_interval:
self.last_trigger_time = current_time
return True
return False
def update_state(self, new_state):
self.last_state = self.state
self.state = new_state
# 模拟智能体之间的通信和状态更新过程
agents = [Agent(i) for i in range(5)] # 假设有5个智能体
current_time = 0
for _ in range(10):
current_time += 1
for agent in agents:
new_state = agent.state + 0.1 # 简单模拟状态变化
agent.update_state(new_state)
if agent.check_event(current_time):
print(f"Agent {agent.id} triggered at time {current_time}")在这段代码里,Agent 类代表一个智能体,每个智能体有自己的 id、状态 state、上次触发时间 lasttriggertime 以及最小事件间隔时间 mineventinterval。checkevent 方法就是用来判断当前时间是否满足触发事件的条件,既要状态变化超过阈值,又要满足最小事件间隔时间。updatestate 方法用于更新智能体的状态。通过这个简单的模拟,我们能大概理解动态事件触发机制的运行方式。
分布式控制协议
有了动态事件触发机制,还需要分布式控制协议来协调各个智能体之间的协作。分布式控制协议就像是一套规则,告诉每个智能体在不同情况下该如何行动,如何与其他智能体进行信息交互,以达到最终的一致性。
虽然具体的分布式控制协议代码会因不同的系统模型和要求而有所差异,但大致思路是每个智能体根据自己接收到的其他智能体的信息(通过事件触发机制来决定何时接收),结合自身状态,按照预定的规则来更新自己的状态。
例如,一种简单的分布式控制协议可能是这样的:
# 继续上面的智能体类,添加分布式控制协议相关方法
class Agent:
# 省略前面定义过的 __init__ 等方法
def receive_info(self, neighbor_states):
# 简单的平均法来更新自己的状态
total = self.state
count = 1
for state in neighbor_states:
total += state
count += 1
self.update_state(total / count)
# 模拟智能体之间的通信和分布式控制
agents = [Agent(i) for i in range(5)]
# 假设每个智能体都能获取到邻居智能体的状态(实际实现更复杂)
neighbor_info = {
0: [agents[1].state],
1: [agents[0].state, agents[2].state],
2: [agents[1].state, agents[3].state],
3: [agents[2].state, agents[4].state],
4: [agents[3].state]
}
for agent in agents:
agent.receive_info(neighbor_info[agent.id])
print(f"Agent {agent.id} state after update: {agent.state}")在这段代码中,receive_info 方法实现了一种简单的分布式控制协议,智能体通过获取邻居的状态信息,然后取平均值来更新自己的状态。当然,实际应用中的协议会更加复杂和智能,需要考虑网络拓扑、信息传输延迟等多种因素。
总结
动态事件触发机制和分布式控制协议在解决定向通信网络的线性多智能体系统一致性问题上,就像是一对默契的搭档。动态事件触发机制有效地避免了不必要的频繁通信和计算,而分布式控制协议则保证了智能体之间能够合理地交互信息,逐步实现一致性。在未来的研究和应用中,这两者的进一步优化和结合,有望在诸如智能交通、分布式机器人协作等众多领域发挥更大的作用。希望通过今天的分享,大家对这个有趣的领域有了更深入的了解,一起期待更多精彩的探索!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)