LabVIEW视觉检测系统:灵活配置相机,精准抓边找圆
通过LabVIEW与HALCON的结合,我们可以轻松实现一个功能强大的视觉检测系统。这个系统不仅能够支持单相机和双相机两种模式,还能够实现边缘检测、圆检测和模板匹配等核心功能。整个系统的实现过程相对简单,但由于HALCON的强大功能,系统的稳定性和准确性都非常不错。未来,我可能会继续探索如何利用HALCON的更多高级功能,比如多模板匹配、基于AI的改进算法等,进一步提升系统的性能和适应性。
labview视觉检测,一个相机,两个相机,抓边,找圆,一套代码任意切换!采用halcon模板匹配
在工业视觉检测领域,LabVIEW搭配HALCON是一个非常强大的组合。我最近在做一个项目,主要需求是用一台或两台相机进行视觉检测,实现边缘抓取、圆形检测以及模板匹配等功能。这个系统需要支持灵活切换相机数量,并且能够在不同模式下运行不同的检测任务。
系统总体架构
首先,整个检测系统包括以下几部分:
- 相机配置与切换:系统支持单相机检测和双相机检测两种模式,并且可以在运行时动态切换。
- 图像采集与预处理:根据不同的检测需求,采集相应的图像,并进行初步的预处理。
- 边缘检测与圆检测:使用HALCON的强大算子实现边缘定位和圆形检测。
- 模板匹配:利用HALCON的模板匹配功能,快速准确地定位目标物体。
下面,我来详细讲解一下这个系统的核心部分,尤其是HALCON的功能实现。
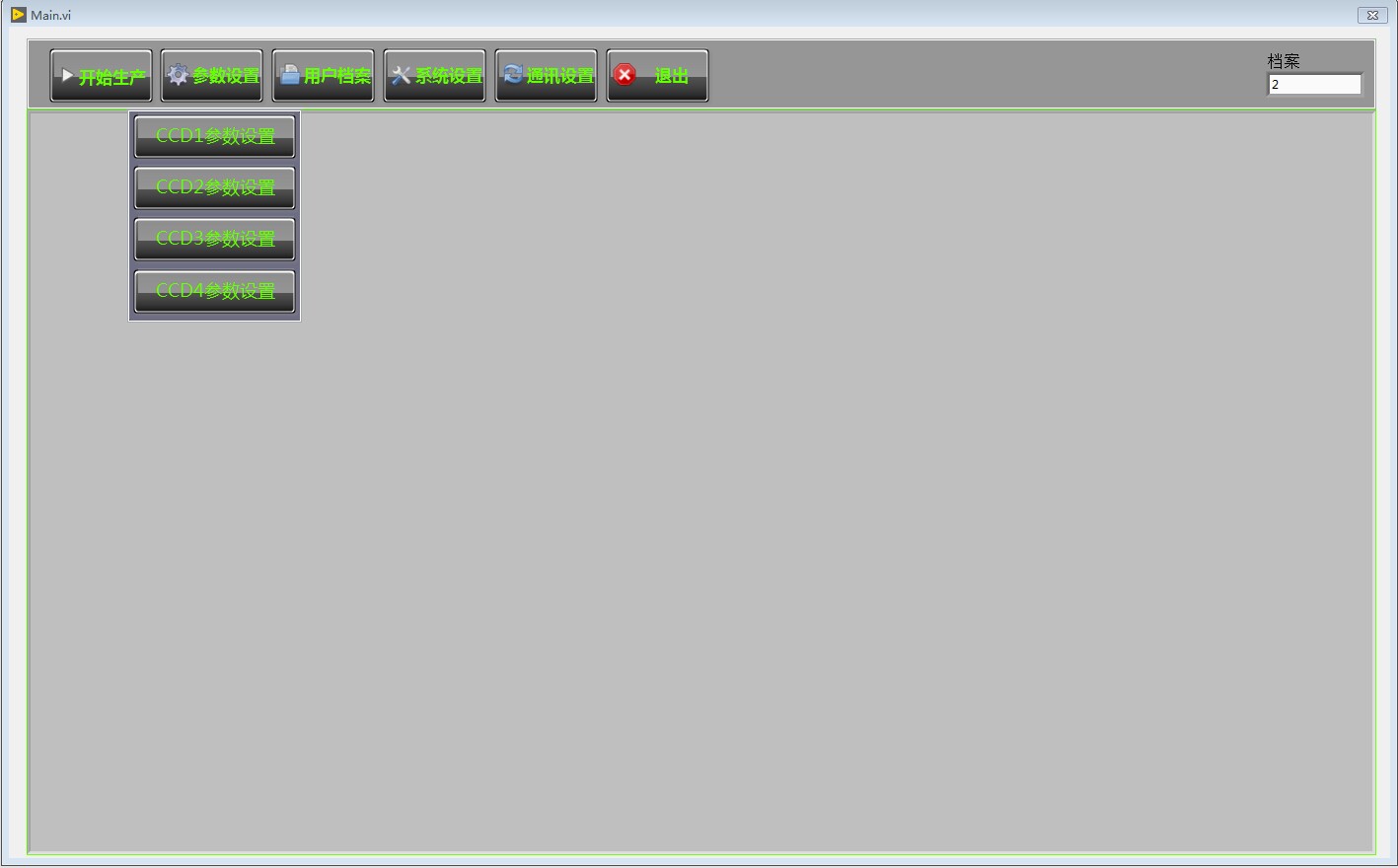
一、相机配置与切换
相机的配置是整个视觉检测系统的基础。我的项目中用到了一个相机和两个相机两种模式,因此相机的配置和切换功能是必不可少的。LabVIEW与HALCON配合可以轻松实现。
一个相机的情况
在单相机模式下,图像采集相对简单。使用如下代码配置相机:
// 配置相机参数
set_camera_parameter(
'acquisition_mode', 'single帧模式',
'exposure_time', 1000, // 暴露时间:1 ms
'gain', 1.0);两个相机的情况
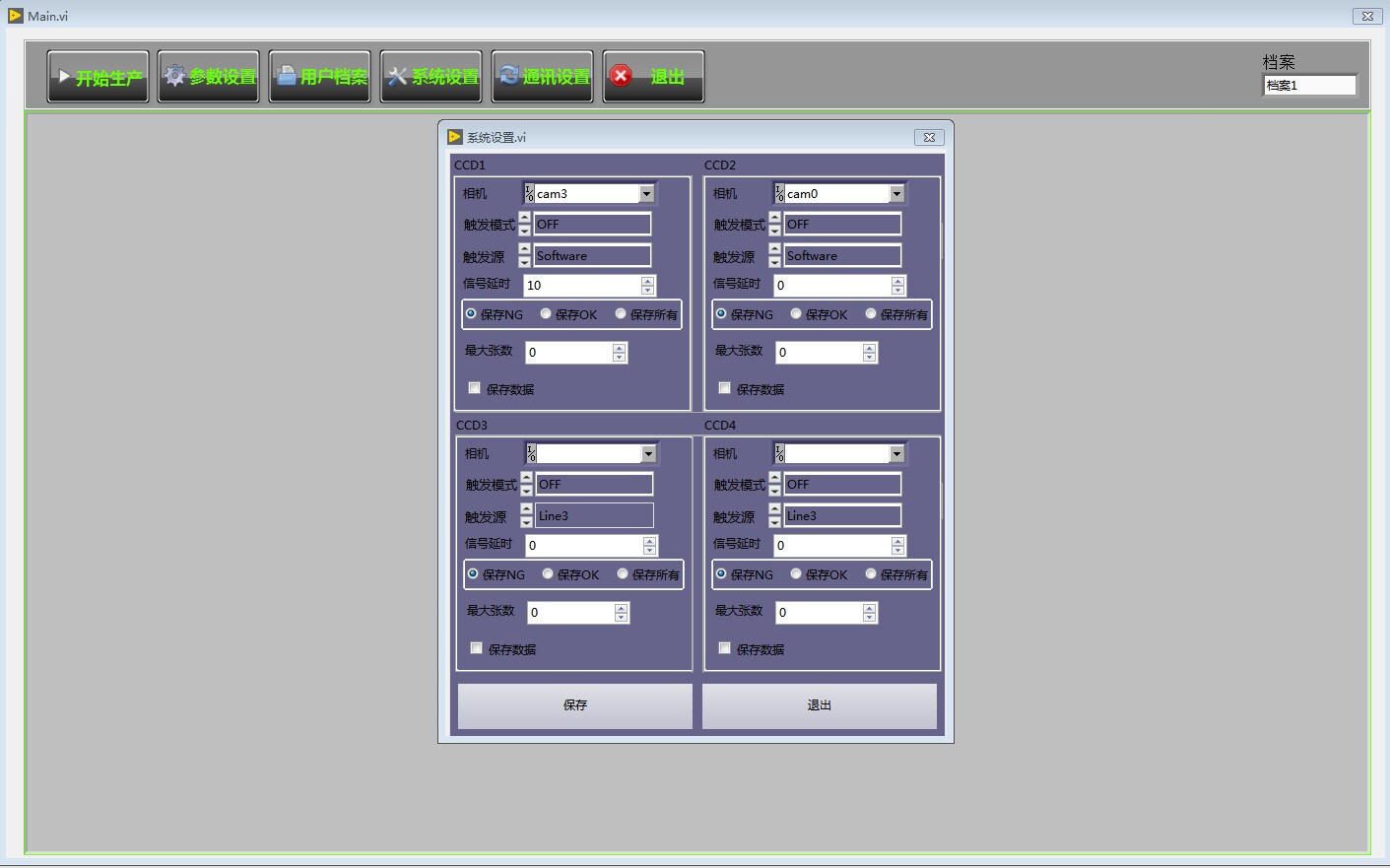
当需要使用双相机时,首先需要确保两台相机已经正确连接,并且在系统中已经被正确识别。然后,我们可以通过配置相机的设备号来调用不同的相机。

代码示例:
// 切换相机设备号
if (camera_mode == '1') {
camera_serial = 'Cam1_Serial';
} else if (camera_mode == '2') {
camera_serial = 'Cam2_Serial';
}
// 设置当前相机
set_camera_parameter(
'camera_serial_number', camera_serial,
'acquisition_mode', 'single帧模式',
'exposure_time', 1000);通过这种方式,我们可以在运行时动态切换相机,而不需要重新编译代码。
二、边缘检测与圆检测
检测物体的边缘和圆的准确性非常关键,尤其是在需要精确测量的工业场景中。边缘检测用于定位物体的轮廓,而圆检测则可以定位圆形目标的位置。
边缘检测
HALCON提供了强大的边缘检测算子。以下是实现边缘检测的核心代码:
// 读取图像
read_image(&ImageHandle, 'input_image', 'png');
// 转换为灰度图像
gen_image(&GrayHandle, 'byte', 1, GrayHandle);
// 检测边缘
gen_empty_region(&EdgeRegionHandle);
find_edges(
&EdgeRegionHandle,
GrayHandle,
'iso',
'light Dark',
0.1,
4);上述代码实现了一个基本的边缘检测流程。通过参数可以控制边缘检测的灵敏度和方法。比如,find_edges中的'iso'参数表示使用等值线算法。
圆检测
圆检测是另一种常见的检测任务,尤其是在需要检测圆形工件的场景中。以下是圆检测的代码:
// 创建圆形模板
gen_circle(&CircleTemplateHandle, 100, 100, 50, 1);
// 检测圆
find_circle(
&CircleHandle,
EdgeRegionHandle,
'full',
20);这里使用find_circle函数来检测图像中的圆形。通过设置半径范围和边缘信息,可以提高检测的准确性。
三、模板匹配
模板匹配是HALCON的强项之一,尤其适用于快速定位已知目标物体的位置。通过模板匹配,我们可以快速定位目标物体,而不需要复杂的图像处理算法。
创建匹配模板
首先,需要创建一个模板:
// 创建模板
create_template_matching_model(
'shape',
'auto',
'ignore',
0,
0,
'no',
'none',
1,
0.5,
0.5,
'auto',
'auto',
0.01,
0.01,
&TemplateHandle);匹配过程
然后,进行模板匹配:
// 匹配
apply_template_matching_model(
&MatchHandle,
TemplateHandle,
GrayHandle,
'auto',
0,
0,
'auto',
'auto',
1.0,
0.0,
10000,
1);通过调整参数,可以控制匹配的灵敏度和准确性。比如,可以通过设置'auto'模式让系统自动调整匹配参数。
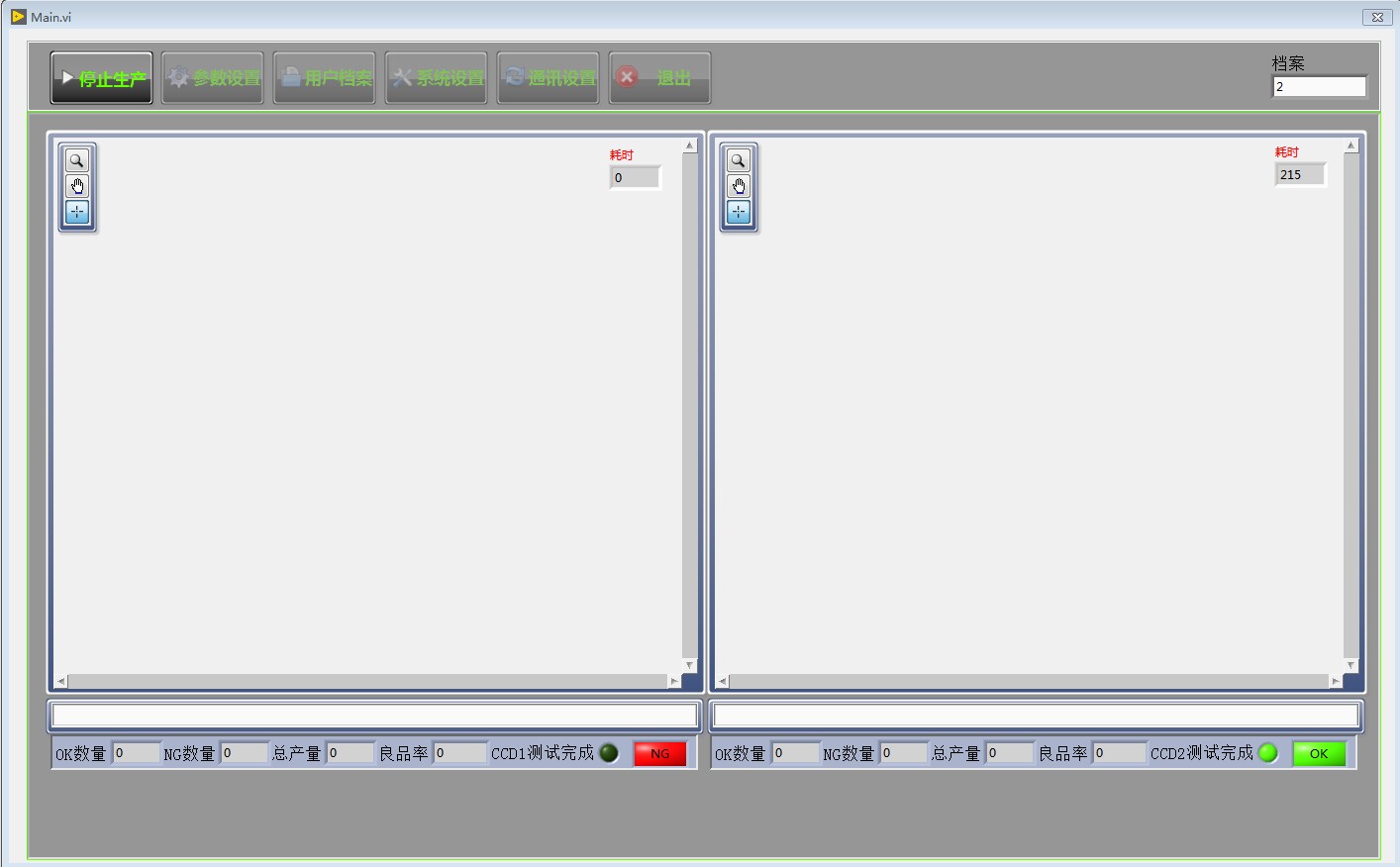
四、系统运行结果
通过上述功能模块的整合,整个系统能够实现灵活的相机切换、准确的边缘和圆检测、以及快速的模板匹配。以下是实际运行中的检测结果:
- 边缘检测结果:系统能够清晰检测出物体的边缘,提供准确的轮廓信息。
- 圆检测结果:系统能够准确识别并定位图像中的圆形目标。
- 模板匹配结果:匹配算法能够快速定位目标物体的位置,并输出匹配结果。
通过将检测结果与原图像对比,可以直观地看到系统的准确性和效率。
五、总结
通过LabVIEW与HALCON的结合,我们可以轻松实现一个功能强大的视觉检测系统。这个系统不仅能够支持单相机和双相机两种模式,还能够实现边缘检测、圆检测和模板匹配等核心功能。整个系统的实现过程相对简单,但由于HALCON的强大功能,系统的稳定性和准确性都非常不错。

未来,我可能会继续探索如何利用HALCON的更多高级功能,比如多模板匹配、基于AI的改进算法等,进一步提升系统的性能和适应性。


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 40
40 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)