无人化AI应用本质是场景化具身智能-基于AIBOX的AI服务:边缘AI框架、云端AI数据集及标注
另外,和传统简单的BBOX不同,行业AI应用往往需要对检测目标实现轮廓检测以及量化、甚至是高精度的3D建模的需求。AIBOX基于现有的软件框架架构体系,提出边缘AI框架的服务,AIBOX完成取流、视频解码以及Scale或定义ROI,并且逐帧输出到共享内存,第三方独立的AI进程基于完成推理后输出结果,AIBOX框架负责OSD画框及标注,实现视频编码并格式上传。无人化应用除了人、车的识别以外还强调人、
无人化AI应用本质是场景化具身智能-基于AIBOX的AI服务:边缘AI框架、云端AI数据集及标注
-
无人化AI应用本质是场景化具身智能
涉及到无人机、机器狗、无人车的无人化应用AI和传统的固定相机的AI有很大不同:
-
无人化AI应用都是非固定背景,背景环境复杂且变化大
-
无人机属于高空拍摄,无人车和机械狗属于低高度拍摄。角度和固定相机有很大不同,无人机很多都是远距离拍摄,无人车和机械狗一般近距离拍摄
-
传统安防摄像机一般多是人、车目标的识别。无人化应用除了人、车的识别以外还强调人、车目标的跟踪
-
包括电力、桥梁、轨道等行业无人化应用,更专注设施的缺陷检测。检测目标以及目标的背景环境非常复杂,也根本没有通用的数据集。另外,和传统简单的BBOX不同,行业AI应用往往需要对检测目标实现轮廓检测以及量化、甚至是高精度的3D建模的需求。需要图像预处理模型、YOLOV5-V8边侧模型以及U-net等分割模型混合使用。
-
和固定相机不同,无人化AI检测除了判定事件以外,同时需要提供目标的位置信息。需要在无人化执行体实时位置数据基础上,通过执行体和目标建立局部相对3D空间坐标系,实现获取目标实时位置。涉及到局部空间的3D感知和坐标系映射。
-
最后实现完整的具身智能,需要在感知、识别、定位后完成设定或者高级认知的执行动作。涉及调整无人化执行体的驾驶,以及拍照、建模、事件上传、操控机械臂等等动作
所以真正有价值的无人化AI应用是一个完整具身智能闭环逻辑的实现,而非单纯的AI。需要多种技术和知识点的融合:
-
无线通信技术-多执行体协同以及集群应用
-
执行体在GNSS和GNSS拒止环境的高精度位姿
-
3D空间感知-执行体和目标的位姿空间感知
-
目标识别及跟踪-复杂背景环境下小目标的识别、跟踪和去重
-
基于语义认知的避障和局部路径动态规划
-
轻量化边缘AI模型以及高实时性要求
-
无人化场景的AI数据集是宝贵的数字资产
无人化场景AI数据集要求:
1、专业性-行业应用的无人化AI场景数据集需要专门的数据采集生成,没有公开的数据集
2、完整性-除了图片,还需要和图片相关的位姿等信息
3、泛化性-目标出现在不同时段以及不同环境背景,不同的拍摄距离和角度
4、去重-减少重复的样本的标定
-
无人机视觉AI数据管理与标注云平台
UAV Vision AI Data Management and Annotation Cloud
“面向无人机视频与空间视觉的AI训练数据云平台”
主打:实时采集、规则抽帧、多格式导出、标注协作
围绕无人机(UAV)视频采集 → 云端数据管理 → AI训练数据生成与管理的完整闭环平台
整体流程逻辑:
AIBOX(边缘侧) → 云端数据仓 → AI数据管理服务 → Web端标注与导出
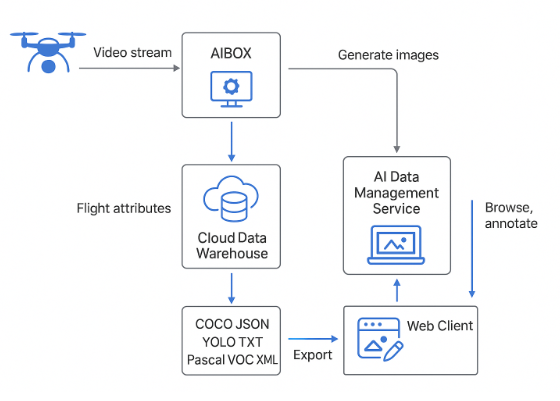
AIBOX支持实时获取无人机、机器狗以及无人车挂载的视频流,支持二次编码以及实时推送云端流媒体服务器(自主),同时同步MQTT推送位置、点云等关联数据。
基于AIBOX的云端AI数据集自动生成和归类,同时提供标注、审核及格式输出。
系统结构:
|
模块 |
功能 |
|---|---|
| Edge Agent(AIBOX 系列) |
统一接入无人机、无人车、机械狗、机械臂的视频与传感数据 |
| Cloud Data Lake(云端数据仓) |
存储多模态数据:视频流、IMU、GPS、雷达点云、姿态参数等 |
| AI Data Service |
规则抽帧、同步属性、生成AI训练集 |
| Web AI Studio |
浏览、标注、格式导出、协作 |
| API / SDK |
提供开发者接口,支持机器人算法训练接入 |
|
模块 |
核心功能 |
技术要点 |
|---|---|---|
| AIBOX边缘端 |
接收无人机视频流,采集飞行属性(速度、高度、焦距、姿态等)并编码打包上传 |
支持 RTSP / RTMP / WebRTC 推流,使用 MQTT / WebSocket 上传元数据;支持同步时间戳;支持在边缘做帧过滤、轻量分析 |
| 云端接入层 |
负责接收视频流和属性数据,进行解码与存储 |
使用RabbitMQ 进行数据流接入;对象存储(如 S3 / OSS)保存视频帧;关系型数据库存属性 |
| 数据仓与规则引擎 |
根据规则生成关键帧/图片,例如按飞行速度、高度、焦距、场景变化等策略抽帧 |
可配置规则引擎(如每变化一定像素差或时间差生成一张图);可自动打标签(如时间、GPS、焦距元信息) |
| AI数据服务层 |
管理图片数据、标注、版本及导出格式 |
提供标注任务管理、多用户协作、版本控制、格式导出(COCO JSON、YOLO TXT、Pascal VOC XML) |
| Web端 |
浏览、标注、管理与打包下载 |
Vue/React + RESTful API;支持图片筛选(高度/速度/焦距/地理位置维度) |
核心竞争力:
|
维度 |
传统标注平台 |
本方案的差异化优势 |
|---|---|---|
| 数据采集来源 |
通常为静态上传图片 |
实时获取无人机视频流和飞行属性,动态生成训练样本 |
| 数据质量控制 |
仅人工判断 |
可根据飞行参数规则筛选关键帧,提高样本代表性 |
| 自动化程度 |
上传-标注-导出流程割裂 |
自动化从视频流→关键帧→标注任务→格式导出 |
| 多维数据融合 |
缺乏属性信息 |
可附带地理、飞行、焦距等多维属性用于后续AI训练 |
| 行业适配性 |
通用图像标注 |
专为无人机及空间感知类AI任务定制(巡检、测绘、监控等) |

AIBOX → 云端视频流 → 自动标注与AI训练数据管理平台支持企业级私有化部署
客户类型与价值逻辑
|
客户类型 |
核心痛点 |
提供的价值 |
|---|---|---|
|
无人机制造商 / 系统集成商 |
缺乏训练数据闭环、不同平台难统一 |
统一AIBOX→云→标注→训练闭环 |
|
机器人 / 机械狗公司 |
新场景频繁、标注成本高 |
自动标注 + 云端协作 |
|
智能安防/巡检公司 |
视频量巨大、人工标注成本过高 |
规则抽帧 + 自动标注节省90%人力 |
|
研究院 / 实验室 |
需要私有化 + 可控安全环境 |
私有化部署 + GPU可控 |
|
政府或军工项目 |
数据不出本地、合规要求 |
离线版 + 私有云许可 |
-
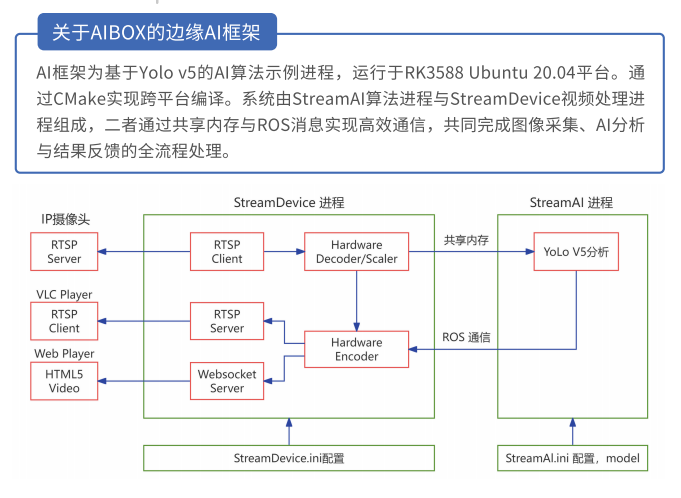
边缘AI框架服务
边缘AI是实现场景化具身中从自主驾驶到智慧驾驶的必然。场景化具身的边缘AI涉及两个方面:一是通过边缘AI提升环境的空间认识实现语义避障和自主路径规划;二是通过边缘AI实现目标的识别及跟踪。
AIBOX基于现有的软件框架架构体系,提出边缘AI框架的服务,AIBOX完成取流、视频解码以及Scale或定义ROI,并且逐帧输出到共享内存,第三方独立的AI进程基于完成推理后输出结果,AIBOX框架负责OSD画框及标注,实现视频编码并格式上传。
AIBOX的边缘AI框架服务完成嵌入式涉及视频编解码等处理工作,合作伙伴仅需实现AI推理即可。快速帮助合作伙伴实现场景具身的边缘AI工作。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)