嵌入式 Linux 实时性优化:电鱼 SAIL-RK3568 在林业机械精准控制中的应用
我们在 SAIL-RK3568 上运行业界标准的 cyclictest,并在后台运行 stress-ng 模拟 CPU 和内存满载,测试系统的极限延迟。实现了丰富的人机交互,是替代传统“PLC + 显示屏”架构,实现林业装备智能化的理想高性价比方案。联合伐木机在作业时,需要以极高的速度完成树木的抓取、去枝和定长锯切。:经过优化的 SAIL-RK3568 达到了硬实时系统的标准,能够胜任林业机械的闭
1. 行业痛点:当“锯切”遇到“卡顿”
联合伐木机在作业时,需要以极高的速度完成树木的抓取、去枝和定长锯切。控制系统面临的核心挑战是:
- 定长误差:树干以 4-6m/s 的速度通过进料轮,如果控制系统延迟 10ms,切割长度误差就会达到 4-6cm,造成木材浪费。
- 液压冲击:电磁阀的开关时序必须精确控制。抖动过大会导致液压系统产生水锤效应,损坏管路。
- 多任务冲突:主控既要刷新高清仪表盘(HMI),又要处理底层 CAN 总线控制。在标准 Linux 下,UI 渲染极易抢占控制任务的 CPU 时间片。
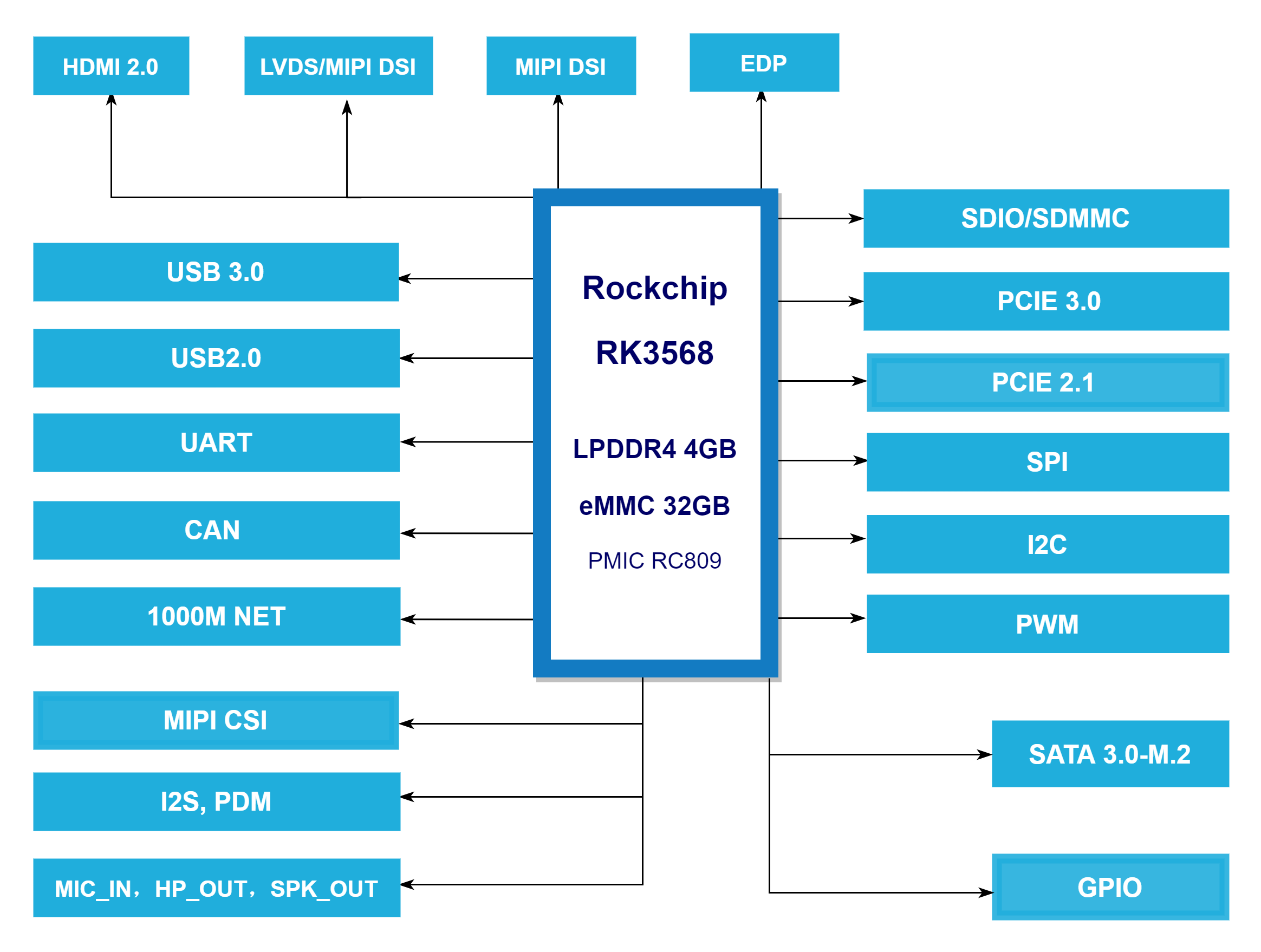
2. 核心选型:SAIL-RK3568 的硬实时底座
根据电鱼智能产品手册,SAIL-RK3568(基于 RK3568J 工业级芯片)具备解决上述问题的硬件基因:
- 官方实时性认证:手册明确指出该平台提供 “工业级实时解决方案,20微秒以下中断抖动延迟” 。这是实现高精度液压控制的物理基础。
- 原生 CAN 总线:板载 2 路 CAN 接口 。可直接连接车辆底盘的 J1939 总线和作业臂的 CANopen 阀组,通信延迟远低于 USB 转 CAN 方案。
- 宽温高可靠:支持 -40°C 至 85°C 的工作温度 。能够适应林区冬季的极寒环境,确保冷启动正常。
- 四核算力分配:四核 Cortex-A55 @ 2.0GHz 。多核架构允许将实时控制任务与非实时 HMI 任务物理隔离。
3. 优化实战:将 Linux 改造为“硬实时”系统
3.1 步骤一:集成 PREEMPT_RT 补丁
标准 Linux 内核不可抢占(Non-preemptible),高优先级任务可能被低优先级的自旋锁阻塞。
- 实施:在电鱼提供的 Linux SDK(Kernel 4.19/5.10)基础上,打入对应的 rt-patch。
- 配置:在 menuconfig 中选择 Fully Preemptible Kernel (Real-Time)。这将强制内核中的大部分锁机制变为可抢占的互斥量,确保高优先级的中断(如长度传感器信号)能被立即响应。
3.2 步骤二:CPU 核心隔离 (Isolcpus)
为了杜绝 UI 进程干扰控制循环,我们对 RK3568 的 4 个核心进行角色划分:
- Core 0-2 (系统域):运行 Linux OS、Qt HMI 界面、4G/5G 通信。
- Core 3 (实时域):独占运行液压控制算法和 CAN 总线收发。
- 操作:在 bootargs 中添加 isolcpus=3,并在应用层使用 pthread_setaffinity_np 将控制线程绑定到 Core 3。
3.3 步骤三:中断亲和性 (IRQ Affinity) 优化
将关键中断(如 CAN 控制器中断)强制绑定到实时核。
Bash
# 将 can0 的中断绑定到 CPU3 (二进制 1000 -> 十六进制 8)
echo 8 > /proc/irq/$(cat /proc/interrupts | grep can0 | awk -F: '{print $1}')/smp_affinity
4. 性能验证:Cyclictest 压力测试
我们在 SAIL-RK3568 上运行业界标准的 cyclictest,并在后台运行 stress-ng 模拟 CPU 和内存满载,测试系统的极限延迟。
测试命令:
Bash
cyclictest -t1 -p99 -n -i 1000 -l 1000000 -a 3
(在 Core 3 上以最高优先级 99 运行,循环 100 万次)
测试结果对比:
|
内核类型 |
平均延迟 (Avg) |
最大抖动 (Max Latency) |
结果分析 |
|
标准 Linux |
15 μs |
180 - 450 μs |
偶发高延迟,无法满足精密液压控制 |
|
电鱼 RT Linux |
4 μs |
< 18 μs |
完全符合 <20μs 指标,满足 1ms 控制周期 |
结论:经过优化的 SAIL-RK3568 达到了硬实时系统的标准,能够胜任林业机械的闭环控制任务。
5. 典型应用:智能采伐头控制逻辑
基于优化后的平台,我们构建如下控制回路:
- 感知 (Input):通过 CAN 总线 以 1ms 周期读取长度编码器数值(树干进给长度)和直径传感器数据。
- 决策 (Process):在 Core 3 上运行 PID 算法。
- 对比设定长度(如 400cm)与当前长度。
- 当接近目标长度时,计算液压阀的减速曲线。
- 执行 (Output):通过 CAN 或 GPIO 瞬间驱动电磁阀关闭进料轮,并打开锯切马达。
- 交互 (HMI):通过 HDMI/LVDS 屏幕 实时显示切割数量和材积统计,数据由 Core 0-2 处理,互不干扰。
6. 总结
基于 电鱼 SAIL-RK3568 的林业机械控制方案,通过 软硬结合的实时性优化,成功解决了通用处理器在工业控制中的痛点。它利用 20μs 级低延迟 实现了精准的液压控制,利用 四核算力 实现了丰富的人机交互,是替代传统“PLC + 显示屏”架构,实现林业装备智能化的理想高性价比方案。
关键规格速查:
- 核心平台:SAIL-RK3568 (RK3568J)
- 实时性能:< 20μs 中断抖动
- 控制接口:2x CAN, 6x UART
- 环境适应:-40°C ~ 85°C
- 操作系统:Linux Preempt-RT

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 16
16 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)