基于 电鱼 RK3588 的无人机机载计算机设计:算力、功耗与重量的平衡艺术
的组合,成功打破了机载计算的“不可能三角”。它为无人机提供了处理复杂 AI 和 SLAM 任务的能力,同时保持了轻盈的身躯和长久的续航,是构建新一代行业级智能无人机的理想核心。传统的 Jetson 系列或 NUC 方案往往在功耗或体积上难以妥协,而。的无人机机载计算机方案,通过。无人机需要“眼观六路”。提供了新的解题思路。根据电鱼智能产品手册,
·
1. 行业痛点:无人机计算的“不可能三角”
设计一款优秀的机载计算机,必须在三个相互制约的维度中寻找平衡:
- 算力(Performance):运行 VSLAM(视觉定位与建图)、YOLO 目标检测需要高算力,通常指向 x86 架构或高功耗 GPU。
- 功耗(Power):无人机电池珍贵,高功耗不仅缩短续航,还带来严重的散热难题(密闭机舱难散热)。
- 重量/体积(Weight/Size):每一克多余的重量都会减少飞行时间,庞大的散热片是不能接受的。
传统的 Jetson 系列或 NUC 方案往往在功耗或体积上难以妥协,而 RK3588 提供了新的解题思路。
2. 核心选型:RK3588 —— 高能效的空中大脑
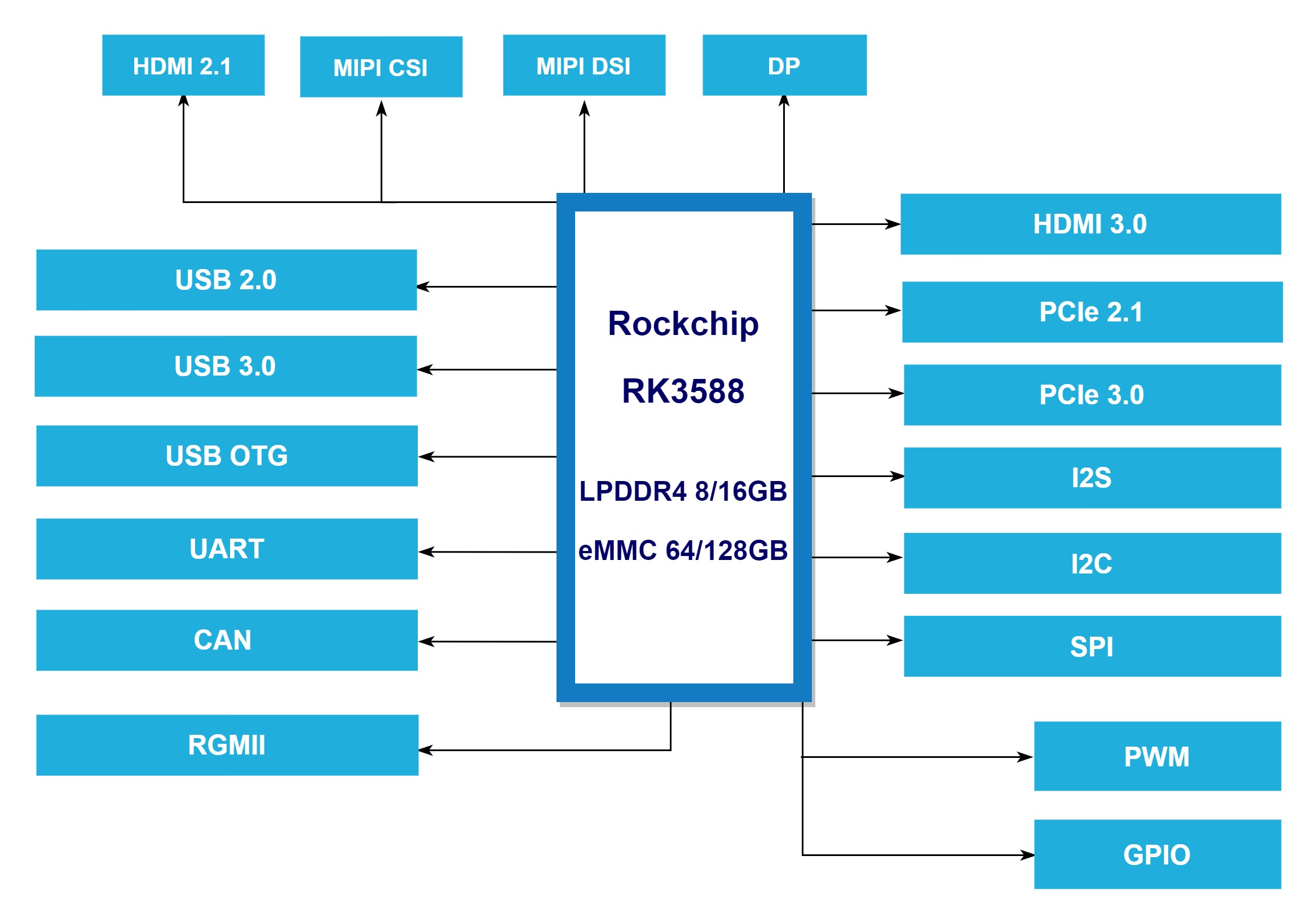
根据电鱼智能产品手册,EFISH-CORE-RK3588 的硬件规格在嵌入式领域处于顶尖水平,且对移动平台极其友好:
- 旗舰级算力:搭载 Rockchip RK3588 八核 64 位处理器(4x Cortex-A76 @ 2.4GHz + 4x Cortex-A55 @ 1.8GHz)。
- 优势:4 个 A76 大核可流畅运行 ROS2 导航栈和 SLAM 算法,4 个 A55 小核处理传感器驱动和通信,实现任务分流。
- 极致能效比:手册数据显示,该核心板的 TDP(热设计功耗)仅为 6W 。相比同等算力的 x86 平台(通常 >15W),它大幅降低了对电池的消耗,且只需被动散热片即可稳定运行。
- 微型化尺寸:核心板尺寸仅为 85mm x 55mm x 6mm 。卡片大小的体积极易集成进紧凑的无人机机身内,配合轻量化底板,整机重量可控制在极低水平。
3. 架构设计:感知、决策与控制的全链路
3.1 感知层:多源数据高速吞吐
无人机需要“眼观六路”。
- 视觉避障:利用 MIPI CSI 接口 连接双目或多目环视摄像头。MIPI 接口延迟低、重量轻(无需 USB 线缆),数据直通 ISP 处理。
- 激光雷达接入:利用板载的 1 路 2500Mbps (2.5G) 以太网口 。该接口带宽充裕,可连接高线束轻量化激光雷达,传输海量点云数据用于实时建图。
3.2 计算层:AI 识别与视频流处理
- 目标追踪:利用内置的 Mali-G610 MP4 GPU 和 NPU,运行轻量级追踪算法(如 KCF 或 NanoTrack),实时锁定地面车辆或人员,并控制云台跟踪。
- 高清图传:利用 RK3588 的 8K 视频编解码能力 。将 4K 机载相机的画面进行 H.265 实时压缩,通过图传链路回传地面站,降低带宽占用。
3.3 控制层:与飞控的实时交互
- 通讯链路:通过 UART 或 CAN 接口 与开源飞控(如 PX4/ArduPilot)连接。
- 指令下发:机载计算机计算出规划路径(Waypoints)或速度矢量(Velocity),通过 MAVLink 协议发送给飞控执行。
4. 工业级可靠性:适应高空环境
- 宽温运行:核心板支持 -40°C 至 70°C 的工作温度 。无论是高空低温还是夏季地表高温起飞,系统都能稳定工作,不会因热保护导致“空中停机”。
- 抗震连接:采用 板对板连接器 (4x100pin) 。这种刚性连接比排线更能抵抗旋翼带来的高频震动,确保接触可靠。
- 宽压供电:支持 DC 9~26V 电源输入 。可直接从无人机的 3S-6S 动力电池取电(需简单的稳压滤波),简化电源模块设计。
5. 总结
基于 电鱼 EFISH-CORE-RK3588 的无人机机载计算机方案,通过 “八核算力 + 6W 低功耗” 的组合,成功打破了机载计算的“不可能三角”。它为无人机提供了处理复杂 AI 和 SLAM 任务的能力,同时保持了轻盈的身躯和长久的续航,是构建新一代行业级智能无人机的理想核心。
关键规格速查:
- 核心平台:EFISH-CORE-RK3588
- 处理器:8核 (4x A76 + 4x A55)
- 功耗:TDP 6W
- 接口:1x 2.5Gbps Ethernet, MIPI CSI, CAN, UART
- 尺寸:85mm x 55mm

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 16
16 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)