常见问题及回答
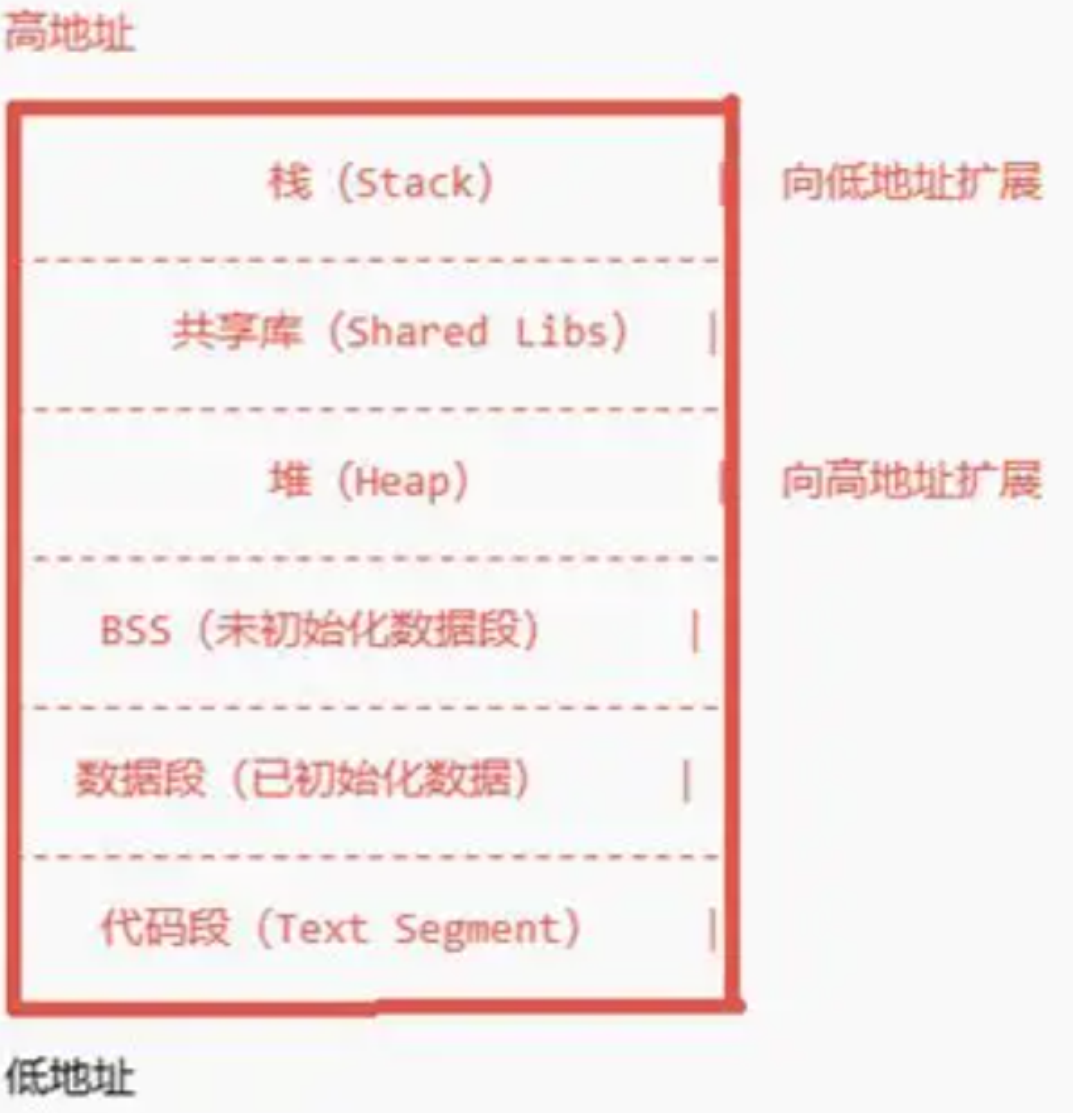
1.1内存布局
1.2 栈和队列的区别
| 特性 | 栈(Stack) | 队列(Queue) |
|---|---|---|
| 操作原则 | 后进先出(LIFO) | 先进先出(FIFO) |
| 插入/删除 | 只在一端(栈顶)操作 | 插入在队尾,删除在队头 |
| 典型应用 | 函数调用、表达式求值、括号匹配 | 任务调度、BFS、缓冲区管理 |
“栈是后进先出(LIFO),只在一端操作,常用于函数调用、括号匹配;队列是先进先出(FIFO),一端入、一端出,用于任务调度、BFS 等场景。两者都是线性结构,但操作规则和应用场景完全不同。”
✅1.3 什么是内存泄漏,如何避免
定义
内存泄漏是指程序在堆上通过 new 或 malloc 分配了内存,但使用完毕后未调用 delete 或 free 释放,导致该内存无法被系统回收。长期积累会耗尽可用内存,引发性能下降甚至程序崩溃。
避免方法
- RAII(Resource Acquisition Is Initialization):将资源管理封装在对象生命周期中。
- 使用智能指针(C++11 起):
std::unique_ptr:独占所有权std::shared_ptr:共享所有权std::weak_ptr:解决循环引用
- 避免裸
new/delete:尽量使用容器(如std::vector)或智能指针管理动态内存。
“内存泄漏是指堆上分配的内存未被释放,长期积累导致内存耗尽。避免方法包括:使用 RAII 原则、优先用智能指针(如
unique_ptr、shared_ptr),避免裸new/delete,并借助工具如 AddressSanitizer 检测。”
✅智能指针, weak_ptr
答:
weak_ptr是一种不控制对象生命周期的智能指针,它不会增加引用计数。主要用途:打破
shared_ptr的循环引用。不能直接解引用,必须通过
lock()转为shared_ptrstd::weak_ptr<int> w = s; // s 是 shared_ptr if (auto sp = w.lock()) { std::cout << *sp; // 安全使用 } else { // 对象已被释放 }典型场景:观察者模式、缓存(如 LRU 中的 weak 引用)。
✅1.4 如何查看对象的内存布局
sizeof(Type):获取对象或类型的总大小(含填充)。offsetof(struct, member):获取结构体成员相对于起始地址的偏移量(仅适用于 POD 类型)。- 编译器扩展(如 GCC 的
-fdump-class-hierarchy)可输出类的内存布局。 - 工具辅助:
pahole(Linux)、Visual Studio 的调试器内存视图等。
“可以用
sizeof和offsetof获取大小与偏移;对于类,GCC 加-fdump-class-hierarchy能输出内存布局;Linux 下也可用pahole工具分析结构体填充和对齐。”
✅1.5 内存对齐
为什么需要对齐?
CPU 通常以“字”(如 4 字节、8 字节)为单位访问内存。对齐的数据可一次读取;未对齐可能需多次访问,降低性能,某些架构甚至直接报错。
对齐规则(默认)
- 每个成员对齐到
min(自身大小, #pragma pack(n))的整数倍地址。 - 整个结构体大小对齐到最大成员对齐值的整数倍。
控制对齐方式
- 禁用填充(紧凑布局):
#pragma pack(1) // 1 字节对齐 struct Packet { char a; int b; }; #pragma pack() // 恢复默认 - C++11 标准对齐控制:
alignas(N):指定对齐字节数(如alignas(16) int x;)alignof(T):查询类型T的对齐要求std::aligned_alloc(size, alignment):分配对齐内存(C11/C++17)
应用场景:网络协议解析、二进制文件读写需禁用填充以保证数据一致性。
✅全局变量初始化时机 & 类构造函数调用时机
-
全局/静态变量:
- 在
main()函数之前初始化。 - 初始化顺序:
- 零初始化(如
int x;→x = 0) - 常量初始化(如
int y = 42;) - 动态初始化(如调用函数:
int z = getValue();)
- 零初始化(如
- 注意:不同编译单元间的全局变量初始化顺序未定义。
- 在
-
类对象构造函数:
- 仅在对象创建时调用(如定义局部对象、
new、作为成员初始化等)。
- 仅在对象创建时调用(如定义局部对象、
“全局变量在
main()之前初始化,分零初始化、常量初始化和动态初始化三阶段;而类的构造函数只在对象创建时调用,比如定义局部变量、new对象或作为成员初始化时。”
✅崩溃常见原因
| 原因 | 示例 |
|---|---|
| 数组越界 | int a[10]; a[100] = 1; |
| 栈溢出 | 无限递归:void f() { f(); }(默认栈空间几 MB) |
| 野指针/悬空指针 | int* p = new int(42); delete p; *p = 10; |
✅什么是段错误
- 操作系统通过内存保护机制,禁止程序访问非法地址(如空指针、已释放内存、只读区域)。
- 当发生非法访问时,CPU 触发异常,OS 发送
SIGSEGV信号终止进程,防止系统被破坏。
✅排查内存访问越界问题
- AddressSanitizer(ASan):
- 编译时加
-fsanitize=address - 运行时自动检测越界、Use-After-Free 等问题,精准定位代码行。
- 编译时加
- GDB 调试:
- 结合 core dump 分析崩溃现场(
bt查看调用栈)。
- 结合 core dump 分析崩溃现场(
- 静态分析工具:
- Clang Static Analyzer、Cppcheck 等可在编译前发现潜在问题。
✅左值 vs 右值 & 引用类型
基本概念
| 类型 | 特点 | 是否可取地址 | 示例 |
|---|---|---|---|
| 左值(lvalue) | 有名字、持久存在 | ✅ | 变量、数组元素、对象成员 |
| 右值(rvalue) | 临时、无名、将亡 | ❌ | 字面量、函数返回值、表达式结果 |
引用类型
| 引用类型 | 语法 | 可绑定对象 | 用途 |
|---|---|---|---|
| 左值引用 | T& |
仅左值 | 避免拷贝、修改原对象 |
| const 左值引用 | const T& |
左值 + 右值 | 延长临时对象生命周期 |
| 右值引用 | T&& |
仅右值 | 实现移动语义、完美转发 |
示例代码
int x = 10;
int& lref = x; // OK:左值引用绑定左值
// int& lref2 = 20; // ❌ 错误
const int& cref = 20; // OK:const 左值引用可绑定右值
int&& rref = 30; // OK:右值引用绑定右值
int&& rref2 = std::move(x); // OK:std::move 将左值转为右值引用
重载示例
void process(int&); // 处理左值
void process(int&&); // 处理右值
int a = 5;
process(a); // 调用左值版本
process(10); // 调用右值版本
process(a + 1); // 调用右值版本
process(std::move(a)); // 显式转为右值,调用右值版本
private:
char* data_; // 指向堆上分配的字符数组
size_t size_;
public:
// 拷贝构造函数(深拷贝)
MyString(const MyString& other) {
size_ = other.size_;
data_ = new char[size_ + 1];
std::strcpy(data_, other.data_);
}
MyString(MyString&& other) noexcept {
// 1. 接管 other 的资源
data_ = other.data_;
size_ = other.size_;
// 2. 将 other 置为空(防止析构时 delete 有效指针)
other.data_ = nullptr;
other.size_ = 0;
移动构造的底层就是指针移交 + 原对象置空。它不分配内存、不复制数据,只是把资源的所有权从一个对象转移到另一个,从而避免昂贵的深拷贝。关键是要把源对象置为安全状态(如 nullptr),防止双重释放。
拷贝构造是初始化一个新对象,它没有旧资源,所以不需要释放;而拷贝赋值是给已有对象赋新值,必须先清理旧资源,否则会内存泄漏。
“左值是有名字、可取地址的对象;右值是临时值。左值引用(
T&)绑定左值用于修改;右值引用(
T&&)绑定右值,用于移动语义。const T&可绑定右值以延长生命周期。”
✅std::move 的作用与原理
- 将左值“转换”为右值引用,使其能参与移动语义(如调用移动构造函数)。
- 不实际移动数据,仅改变表达式的值类别(value category)。
底层实现
template<typename T>
typename std::remove_reference<T>::type&& move(T&& t) {
return static_cast<typename std::remove_reference<T>::type&&>(t);
}
- 本质是
static_cast<T&&>的封装,无运行时开销,纯编译期类型转换。
“
std::move不移动数据,只是将左值转为右值引用,让编译器选择移动构造函数。底层是static_cast<T&&>,无运行时开销,纯类型转换。”
✅std::forward 的使用场景
在模板函数中保持参数的原始值类别(左值/右值),实现完美转发(Perfect Forwarding)。
使用条件
- 仅用于转发引用(forwarding reference):
template<typename T> void f(T&& arg) - 必须显式指定模板参数:
std::forward<T>(arg)
template<typename T>
void wrapper(T&& arg) {
process(std::forward<T>(arg)); // 保持 arg 的原始类型
}
int x = 10;
wrapper(x); // T = int&, 转发为左值
wrapper(20); // T = int, 转发为右值
🎯 面试答法:“用于模板中的完美转发:在转发引用(
T&&)函数里,用std::forward<T>(arg)保持参数原始的左值/右值属性,确保调用正确的重载版本。”
✅虚函数表工作原理
每个包含虚函数的类或派生类都有一个虚函数表。虚函数实际上是一个函数指针数组,里面存放虚函数的地址。每个对象一般情况下有一个指向虚函数表的虚指针。当调用虚函数时,通过对象的虚指针找到虚函数表,再通过索引找到对应函数。
多态
| 类型 | 决策时机 | 实现方式 | 示例 |
|---|---|---|---|
| 静态多态 | 编译期 | 函数重载、模板 | template<typename T> void f(T); |
| 动态多态 | 运行期 | 虚函数 + 基类指针/引用 | virtual void draw(); |
✅动态多态使用频率
- 高频使用:在需要运行时行为扩展的场景(如 GUI 组件、游戏对象、插件系统)。
- 核心机制:通过虚函数表(vtable)实现,有轻微性能开销,但灵活性极高。
“多态是同一接口多种实现。静态多态靠模板(编译期),动态多态靠虚函数(运行期)。动态多态在插件系统、UI 框架、游戏对象中很常用,虽有轻微开销,但灵活性高。”
✅单例模式的场景,实际
STL 常用容器,vector扩容机制,扩容时具体过程?
- 序列式:
vector(动态数组)、deque(双端队列)、list(双向链表) - 关联式:
map/set(红黑树)、unordered_map/unordered_set(哈希表)
当 push_back 导致 size() == capacity() 时,vector 会自动扩容。
- 开辟新空间
- 转移数据
- 使用拷贝构造会一个一个字符的复制过去开销大
- 移动构造则为每个元素调用移动构造函数,转移资源所有权
- 释放旧空间
- 更新指针和容量
⚠️ 关键影响:
-
时间复杂度:单次
push_back平均 O(1)(摊还分析),但扩容那次是 O(n) -
迭代器/指针/引用失效:扩容后所有指向旧内存的指针都变“野指针”
“常用容器:
vector、unordered_map、string。vector扩容时,当容量不足,会分配更大内存(通常 1.5 或 2 倍),用移动或拷贝构造迁移元素,再释放旧内存。扩容后迭代器失效,建议用reserve预分配。”
✅map底层实现,插入复杂度,vector 插入
✅进程线程区别?
-
开销
- 进程:创建/切换慢(需复制页表、TLB 刷新,内核开销大)
- 线程:创建/切换快(共享地址空间,只切寄存器和栈)
-
通信
- 进程:需 IPC(管道、共享内存等),有内核开销
- 线程:直接读写共享内存,高效但需同步(锁、原子操作)
-
健壮性
- 进程崩溃不影响其他进程;
- 任一线程崩溃会导致整个进程退出。
-
资源与调度
- 进程是资源分配单位(内存、文件句柄等按进程统计);
- 线程是CPU 调度单位(内核调度的是线程)。
- 进程是资源分配单位(内存、文件句柄等按进程统计);
✅线程怎么用的
✅共享资源并发控制方式
小操作用原子变量,复杂逻辑用互斥锁;读多写少考虑读写锁;极致性能才考虑无锁。
✅原子变量和互斥锁区别,为什么更轻量,底层实现
原子变量靠 CPU 指令实现无锁同步,避免了互斥锁的内核态切换开销,但只适用于简单操作。
原子变量 vs 互斥锁:区别、为什么更轻量、底层实现
| 原子变量 | 互斥锁 | |
|---|---|---|
| 粒度 | 单个变量 | 任意临界区 |
| 阻塞 | 无(通常 busy-wait 或硬件指令) | 可能阻塞线程(进内核) |
| 开销 | 极低(CPU 指令级) | 较高(系统调用 + 上下文切换) |
✅ 为什么更轻量
了解动态库和静态库的区别吗,优缺点
- 静态库:服务端热修复。部署简单、启动快、无依赖;但体积大、更新难、浪费内存。
- 动态库:嵌入式/安全场景使用。节省内存、支持热更新、便于插件化;但有依赖问题、加载稍慢。
“静态库在编译时链接进可执行文件,部署简单但体积大、更新难;动态库运行时加载,节省内存、支持热更新,但有依赖问题。服务端倾向动态库便于维护,嵌入式常用静态库避免依赖。”
✅动态库热更新是怎么做的
热更新=即不重启进程,替换正在使用的动态库
“热更新需避免直接覆盖正在使用的
.so。做法是:先加载新库(dlopen),通过函数指针切换逻辑,等旧任务结束后dlclose旧库。关键要保证 ABI 兼容,并处理好正在执行的函数。实际中更常用滚动重启,C++ 层热更新风险高,多用于插件或脚本层。”
shell命令考查,查找文件字符串,统计某个词出现次数?
✅ 查找包含某字符串的文件:
grep "keyword" filename # 查看某文件
grep -r "keyword" /path/ # 递归查找目录
✅ 统计某个词出现次数(精确单词):
grep -o -w "word" file.txt | wc -l
-o:只输出匹配部分(每行一个)-w:匹配完整单词(避免 “word” 匹配到 “keyword”)wc -l:统计行数 = 出现次数
✅gdb断点有几种方式,显示栈帧,切换栈帧,多线程怎么用
| 设断点 | break main(函数) break file.cpp:20(行号) break *0x400526(地址) |
| 显示栈帧 | bt(backtrace,完整调用栈) info frame(当前帧详情) |
| 切换栈帧 | frame 2(跳到第 2 层) up/down(上下移动) |
| 多线程调试 | info threads(列出线程) thread 2(切换到线程 2) thread apply all bt(所有线程栈) |
“断点可用函数名、行号或地址;用
bt看栈,frame N切帧;多线程用info threads和thread N切换,thread apply all bt查所有线程状态。”
✅gdb?
答:了解。
gdb是 GNU 调试器,用于调试 C/C++ 程序。常用功能包括:
- 启动/附加进程:
gdb ./a.out或gdb -p <pid>- 设置断点:
break func/b 25- 单步执行:
step(进函数)、next(不进函数)- 查看变量:
print x- 查看调用栈:
bt(backtrace)- 调试 core dump:
gdb ./a.out core- 多线程调试:
info threads,thread 2- 条件断点、watch 变量等高级功能。
是排查段错误、死锁、逻辑错误的利器。
✅崩溃gdb调试
-
生成 core 文件(若未开启):
ulimit -c unlimited # 允许生成 core ./program # 崩溃后生成 core.pid -
用 GDB 加载:
gdb ./program core.pid -
关键操作:
bt:看崩溃时的调用栈frame N:定位到具体函数print var:查看变量值info registers:看寄存器(如 rip 指向非法地址)
“先确保生成 core 文件,用
gdb 程序 core加载,然后bt看栈,frame定位,
✅断言原理,为什么用断言,为什么能结束程序?
原理
assert(expr) 是宏,当expr为假时:
- 打印错误信息(文件、行号、表达式)
- 调用
abort()→ 发送SIGABRT信号 → 终止程序
为什么用?
- 调试期快速暴露逻辑错误(如空指针、非法参数)
- 文档作用:表明“此处条件必须成立”
🎯 面试答法:
“断言用于调试期检查程序不变式,失败时调用abort()终止进程。它不是错误处理机制,而是‘早崩早发现’的防御性编程手段。”
✅简单说tcp和udp区别
| 连接 | 面向连接(三次握手) | 无连接 |
| 可靠性 | 可靠(重传、确认、排序) | 不可靠(可能丢包、乱序) |
| 速度 | 慢(开销大) | 快(头部小,无控制) |
| 适用场景 | HTTP、文件传输 | 视频通话、DNS、游戏 |
🎯 面试答法:
“TCP 可靠但慢,适合传文件;UDP 快但不可靠,适合实时音视频。选型看业务对可靠性和延迟的要求。”
tcp粘包,实际有在应用层解决过吗
✅ 什么是粘包?
- TCP 是字节流协议,无消息边界,发送多个包可能被合并(粘包),或一个包被拆开(拆包)。
-
固定长度:每条消息定长(如 1024 字节),不足补零
-
分隔符:用
\n或特殊字符分隔(如 Redis 协议) -
长度头:最常用!前 4 字节表示 body 长度
[4-byte len][data...]- 读取 4 字节 → 得到 len → 再读 len 字节 → 完整消息
🎯 面试答法:
“在 Web 服务器中,我用‘长度头 + JSON’协议解决粘包:先读 4 字节长度,再读对应字节数的 JSON,确保消息完整解析。”
TCP三次握手,四次挥手过程?
✅心跳检测
检测链接是否存活,防止中间设备(NAT)长时间无数据断开连接。
应用层:定期发送PING/PONG消息
传输层:启用 TCP Keep-Alive(SO_KEEPALIVE),但默认间隔长(2 小时)
✅操作系统内核态
操作系统内核运行态,权限高,可访问所有资源。但是存在上下文切换+TLB刷新+安全检查,开销较大。
✅死锁条件 怎么避免
- 破坏“持有并等待”:一次性申请所有资源
- 破坏“循环等待”:资源编号,按序申请
- 银行家算法:动态检测安全状态(理论可行,工程少用)
- 超时机制:加锁失败则回退重试
✅C++如果要设计一个string库,要考虑哪些内容
- 内存管理:实现构造、析构、拷贝构造和赋值运算符,确保正确的内存分配释放
- 基本接口:实现
length(),reserve(),operator[]等常用方法 - 常用功能:提供
append(),find(),substr()等字符串操作 - 异常安全:保证基本的内存分配异常处理”
✅C++ vector特性
- 连续内存、随机访问 O(1)
- 尾插摊还 O(1),中间插入 O(n)
- 扩容时迭代器失效
- 支持移动语义(C++11)
✅面对对象三大特性
- 封装:隐藏内部实现
- 继承:
- 多态:
✅多态,虚函数,函数指针
- 多态:同一接口多种实现(运行时通过虚函数表)
- 虚函数:用
virtual声明,派生类可重写,调用时动态绑定 - 函数指针:指向普通函数或静态成员函数,无多态能力
✅C++回调函数
本质是将函数作为参数传递给了另外一个函数,并在特定时期进行调用的机制。
void callback(int x) {
std::cout << "Callback called with: " << x << std::endl;
}
void doWork(void (*cb)(int)) {
cb(42);
}
// 使用
doWork(callback);
-----------------------------------------------------------------
#include <functional>
typedef std::function<void(int)> Callback;
void doWork(Callback cb) {
cb(42);
}
// 使用 lambda(可捕获上下文)
int val = 100;
doWork([val](int x) {
std::cout << x + val << std::endl;
});
void doWork(std::function<void(int)> cb) {
cb(42);
}
// 使用 lambda(可捕获上下文)
int val = 100;
doWork([val](int x) {
std::cout << x + val << std::endl;
});
✅用过哪些容器,为什么不用 map,而用 unordered_map
常用容器:
vector,list,deque,set,map,unordered_map,unordered_setmap vs unordered_map:
底层 红黑树(有序) 哈希表(无序) 查找复杂度 O(log n) 平均 O(1),最坏 O(n) 是否有序 是 否 内存开销 较小 较大(哈希桶 + 负载因子) 选择 unordered_map 的原因:
- 需要高性能查找/插入(如缓存、ID 映射)
- 不需要元素有序
- 键类型支持哈希(或自定义 hash)
✅ 你对上下文的理解
答:上下文(Context)指程序执行时的环境状态,不同场景含义不同:
- CPU 上下文:寄存器、程序计数器、栈指针等,线程切换时需保存/恢复。
- 函数调用上下文:局部变量、参数、返回地址(即栈帧)。
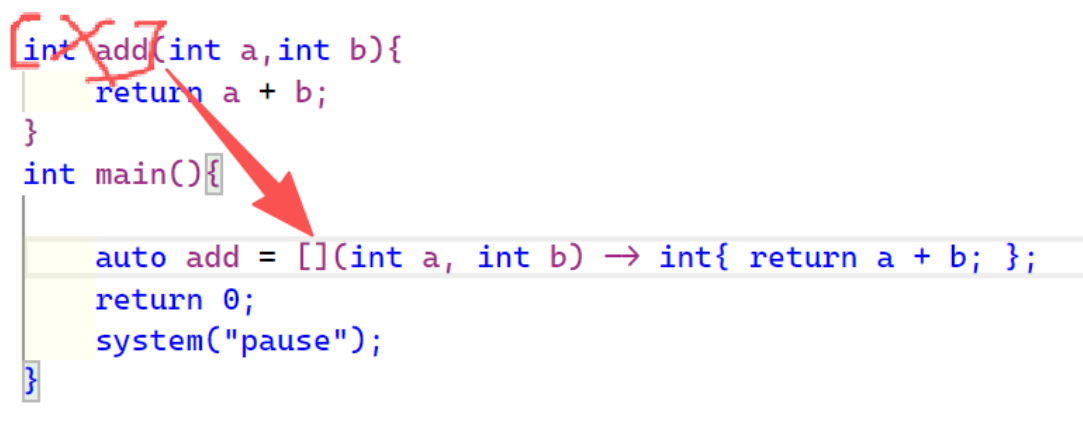
✅lambda表达式
作为匿名函数,可以作为参数直接传给函数,作用域限定和编译器内联优化。
✅std::move 在 lambda 捕获中的作用
[变量名 = std::move(外部变量)]
背景:std::unique_ptr 的特性
std::unique_ptr是独占所有权的智能指针。- 不能拷贝(copy),只能移动(move)。
- 一旦被
move,原变量变为nullptr。
auto b = std::make_unique<int>(5);
auto b2 = b; // 编译错误!不能拷贝 unique_ptr
auto b2 = std::move(b); // 可以移动,b 现在是 nullptr
如何把 unique_ptr 传进 lambda?
如果直接按值捕获 [b]:
auto f = [b](int a) { ... }; // 编译错误!
因为 lambda 默认会拷贝捕获的变量,但 unique_ptr 禁止拷贝 → 编译失败!
解决方案:C++14 的“初始化捕获”(广义 lambda 捕获)
语法:[新变量名 = 表达式]
[c = std::move(b)]
含义:
- 在 lambda 内部创建一个名为
c的成员变量 - 它的值由
std::move(b)初始化 - 结果:
b的所有权被 move 到 lambda 内部的c
三、move 的作用总结
std::move(b) |
将b转为右值引用(unique_ptr<int>&&) |
[c = std::move(b)] |
用这个右值初始化 lambda 内部的成员c,触发move 构造 |
| 捕获后 | b变为nullptr,c拥有原内存的所有权 |
| lambda 销毁时 | c自动析构,释放内存(RAII) |
#include <iostream>
#include <memory>
#include <typeinfo>
int main() {
auto b = std::make_unique<int>(5);
auto f = [c = std::move(b)](int a) { // 广义捕获 + move
std::cout << a << std::endl;
// 注意:这里其实没用到 c,但 c 已被移动进 lambda
};
f(5);
// 输出 lambda 类型(用于调试,实际无意义)
std::cout << typeid(f).name() << std::endl;
}
✅有哪些强制类型转换?dynamic_cast 的用途
答:C++ 有四种类型转换:
static_cast:静态转换(编译期),用于相关类型(如 int↔float,基类↔派生类向上)dynamic_cast:动态转换(运行时),用于带多态的类继承体系const_cast:移除/添加const(慎用)reinterpret_cast:底层 reinterpret(如指针↔整数),极不安全
dynamic_cast用途:
- 安全地向下转型(基类指针 → 派生类指针)
- 需要基类有虚函数(RTTI 支持)
- 失败时:指针返回
nullptr,引用抛std::bad_castBase* b = new Derived(); Derived* d = dynamic_cast<Derived*>(b); // 安全 if (d) { /* 转换成功 */ }
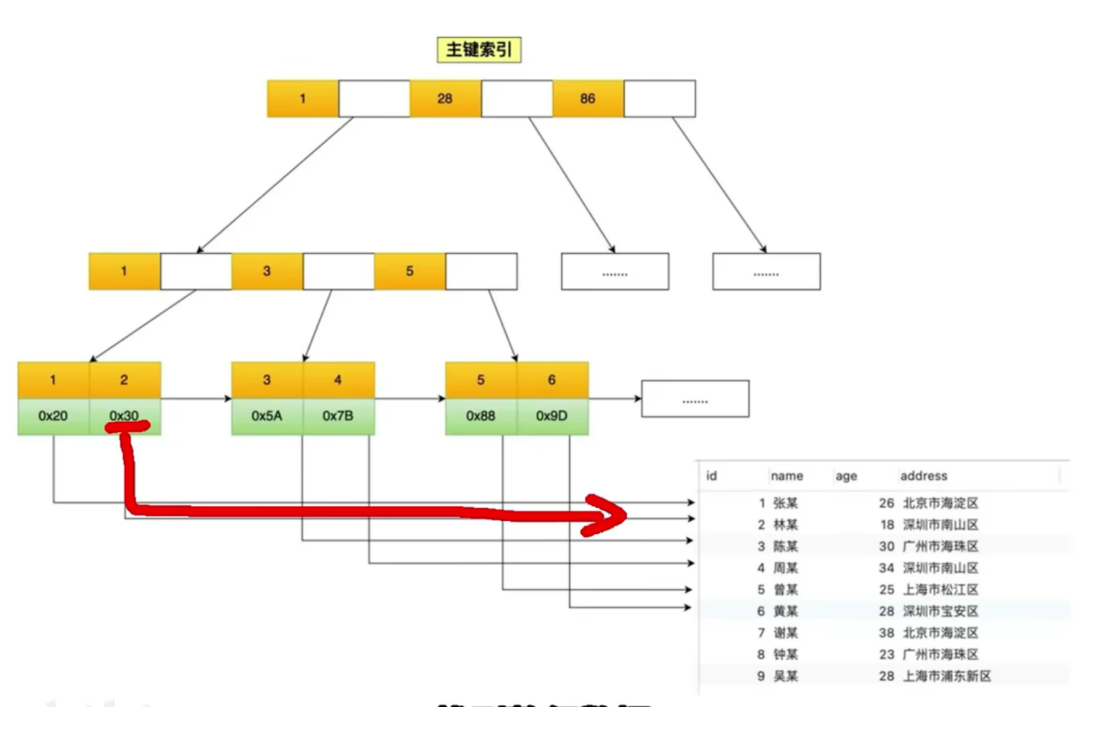
✅MySQL 索引底层实现
-
默认存储引擎 InnoDB 使用 B+ 树作为索引结构。
-
为什么是 B+ 树?
- 相比二叉树/红黑树:减少磁盘 I/O 次数(树高度低,适合磁盘块读取)。
- 相比 B 树:非叶子节点不存数据,只存索引 → 单页可存更多键 → 树更矮 → 查询更快。
- 叶子节点用双向链表连接 → 范围查询高效(如
WHERE id BETWEEN 10 AND 100)。
-
聚簇索引 vs 非聚簇索引:
- InnoDB 中,主键索引 = 聚簇索引,数据行与索引存储在一起。
- 二级索引(非主键)的叶子节点存的是主键值,需回表查询。
下述回表。
makefile更新条件是 a.exe:xx.cpp...;后者比前面时间戳新就更新
- 安全地向下转型(基类指针 → 派生类指针)
- 需要基类有虚函数(RTTI 支持)
- 失败时:指针返回
nullptr,引用抛std::bad_castBase* b = new Derived(); Derived* d = dynamic_cast<Derived*>(b); // 安全 if (d) { /* 转换成功 */ }
C++的覆盖和重载,重写有什么区别
这是关于C++多态性两个核心概念的区分。
- 重载 (Overload):发生在同一个作用域内(如一个类内部或同一个命名空间)。它允许定义多个同名函数,但它们的参数列表(类型、个数、顺序)必须不同。返回值类型可以相同也可以不同。重载是编译时多态,编译器根据调用时的实参来决定具体调用哪个函数。
- 重写/覆盖 (Override):发生在继承体系中。派生类重新定义基类中已有的虚函数(virtual function)。要求函数签名(函数名、参数列表、常量性)必须完全相同,返回值类型通常也要相同(协变返回类型除外)。覆盖是实现运行时多态的关键,通过基类指针或引用调用虚函数时,实际执行的是对象类型(派生类)所定义的版本。
一句话总结:重载是“水平方向”的同名不同参,编译时决定;覆盖是“垂直方向”的重新实现,运行时决定。
脚本:
“,这个问题主要从发生场景、要求和多态类型来区分。重载主要在一个类内部,通过参数列表区分同名函数,是编译时绑定。而覆盖特指在继承关系里,子类对父类
virtual函数的重新实现,要求函数签名严格一致,并通过虚函数表实现运行时动态绑定。例如,一个Calculator类可以有多个add函数重载处理整型和浮点型,而Shape基类的virtual draw()函数可以被Circle、Rectangle等派生类覆盖,实现不同的绘制逻辑。”
如果父类和子类有一个函数签名相同的函数,加virtual和不加的区别
这个区别是C++多态性的核心。
- 加
virtual(构成覆盖):- 当通过基类指针或引用调用该函数时,行为取决于指针/引用所指向的实际对象类型。
- 如果指向派生类对象,则调用派生类的版本。这就是运行时多态(动态绑定)。
- 实现机制是每个有虚函数的类都有一个虚函数表(vtable),通过它间接调用。
- 不加
virtual(不构成覆盖,是隐藏):- 通过基类指针或引用调用时,无论实际对象是什么类型,都只会调用基类的版本。这是编译时绑定(静态绑定)。
- 派生类中的同名函数会“隐藏”基类的版本。如果直接通过派生类对象调用,会调用派生类的版本,但这与多态无关。
脚本:
“区别在于是否启用动态绑定,这直接决定了程序的运行行为。加上
virtual关键字,就建立了覆盖关系,通过基类指针调用时会根据对象真实类型跳转到子类的实现。如果不加virtual,即使子类有同名函数,通过基类指针调用也永远执行基类的代码,子类函数实际上隐藏了父类的。举个例子,如果Base和Derived都有void func(),用Base* p = new Derived(); p->func();,有virtual则调用Derived::func,没有则调用Base::func。”
想在派生类中调用父类同名同函数签名的方法,可以怎么做
有两种常见方式:
- 使用作用域解析运算符
:::在派生类成员函数中,直接通过基类名限定调用。这是最常用、最清晰的方式。void Derived::someFunction() { Base::sameNameFunction(); // 明确调用基类版本 // ... 其他派生类逻辑 } - 在覆盖函数中直接调用:当派生类覆盖了基类的虚函数,但又想复用基类的实现时。
void Derived::sameNameFunction() override { Base::sameNameFunction(); // 先执行基类逻辑 // ... 然后执行派生类特有的逻辑 }
脚本:
“通常使用作用域解析运算符
::来显式指定。比如在派生类Derived的成员函数里,写Base::methodName()就能调用到父类被隐藏或覆盖的那个方法。这在实现子类函数,需要先完成父类公共逻辑时非常有用。例如,在子类的onInit()覆盖函数中,先调用Parent::onInit()完成基础初始化,再添加子类的特定初始化代码。”
如何在派生类中定义一个父类的指针
在派生类内部,可以直接使用基类的类型名来定义指向基类的指针,因为派生类继承了基类的所有接口。
class Base { /* ... */ };
class Derived : public Base {
public:
void someMethod() {
Base* basePtr = this; // 常用:将`this`(派生类对象地址)赋给基类指针
Base* anotherPtr = new Base(); // 也可以指向一个独立的基类对象
// 使用 basePtr...
}
};
关键点:派生类对象“是一个”基类对象,所以派生类的this可以隐式转换为基类指针。这是实现多态的基础。
脚本:
“在派生类内部定义父类指针是完全合法的,因为公有继承意味着‘is-a’关系。最常见的使用场景就是把
this指针赋值给一个基类指针,比如Base* ptr = this;,这样这个指针就可以用于调用虚函数实现多态,或者作为参数传递给期望接收基类指针的函数。这体现了C++向上类型转换的安全性。”
Static关键字修饰局部变量、全局变量、成员函数、成员变量的作用
static关键字根据上下文有不同的含义,核心思想是改变生命周期和/或作用域。
- 局部变量:将变量的生命周期延长至整个程序运行期,但作用域仍限于该函数内。首次执行时初始化,之后调用函数时保持上次的值。
- 全局变量/函数:将链接性改为内部链接。该变量/函数仅在当前编译单元(.cpp文件)内可见,避免与其他文件中的同名全局符号产生冲突。
- 类成员变量(静态成员变量):属于类本身,而非某个对象。所有类对象共享同一份数据。必须在类外单独定义和初始化(通常放在.cpp文件)。
- 类成员函数(静态成员函数):属于类本身,可通过类名直接调用。它不能访问类的非静态成员(因为没有
this指针),常用于操作静态成员变量或工具函数。
脚本:
“
static是一个多功能关键字。对局部变量,它实现函数状态持久化。对全局变量或函数,它限制作用域到本文件,避免命名污染。在类里,它用于创建属于类本身的成员。静态成员变量是所有实例共享的全局状态,需要在类外单独定义;静态成员函数则像一个工具函数,没有this指针,所以不能直接访问普通成员。比如,可以用静态成员变量count来统计创建了多少个类实例。”
volatile的作用是什么
volatile是一个类型修饰符,主要作用是:
- 阻止编译器优化:告诉编译器,该变量的值可能会被程序之外的代理(如硬件、其他线程、信号处理程序)意外改变。因此,编译器每次访问该变量时都必须从内存中重新读取,而不是使用寄存器中的缓存值;每次修改后也必须立即写回内存。
- 保证访问顺序:在一定程度上防止编译器对
volatile变量访问指令进行重排序(但并非线程同步的完整保障)。
主要应用场景:嵌入式编程中访问内存映射的硬件寄存器;多线程编程中(结合适当的屏障)访问共享标志位;信号处理程序中修改的变量。
脚本:
“
volatile的核心是告诉编译器‘不要假设这个变量的值’。它主要用在两种场景:一是嵌入式里访问硬件寄存器,比如一个映射到IO端口的变量,它的值会由硬件改变,编译器不能做常量传播或缓存优化。二是多线程中,虽然它本身不提供原子性或内存屏障,但可以防止编译器过度优化对共享标志位的读写。不过要注意,volatile不能替代std::atomic或互斥锁来保证线程安全。”
** Inline的作用是什么**
inline是一个建议性关键字,主要作用有两个:
- 建议编译器进行内联展开:在调用处,用函数体的代码直接替换函数调用语句。目的是消除函数调用的开销(如参数压栈、跳转、返回等)。
- 允许在多个编译单元中重复定义:对于非成员函数(全局函数)或静态成员函数,
inline允许其定义(而不仅仅是声明)出现在多个.cpp文件中而不会引发链接错误。这通常用在头文件中。
注意:inline只是对编译器的建议,编译器有权忽略。递归函数、包含循环或复杂控制流的函数通常不会被内联。
脚本:
“
inline主要有两个目的。第一个是性能优化,它建议编译器将函数调用展开成函数体代码,节省了调用开销,适用于短小、频繁调用的函数。第二个是定义规则放宽,它允许将函数的完整定义放在头文件里,方便多个源文件包含而不会导致重定义链接错误。现代编译器非常智能,即使没有inline关键字,也会自动进行内联优化。”
Inline是怎么加快函数运行效率
内联通过消除函数调用的额外开销来加速,具体包括:
- 节省调用指令:无需执行
call和ret指令。 - 减少栈操作:无需压入返回地址、保存/恢复某些寄存器。
- 省略参数传递:直接在展开的代码中使用实参,省去了参数压栈或寄存器传参的过程。
- 启用更多优化:内联后,函数体与调用处代码融为一体,编译器可以对其进行更激进的整体优化,如常量传播、死代码消除等。
代价:可能导致代码膨胀(如果函数体较大且在多处调用,被多次展开),反而可能降低指令缓存命中率,损害性能。
脚本:
“内联加快效率的本质是‘用空间换时间’。它把函数调用这个相对昂贵的操作——包括参数传递、栈帧建立、跳转和返回——给省掉了,直接把函数体像宏一样插入到调用点。这样不仅减少了指令,更重要的是让编译器能看到内联后的完整上下文,从而有机会做跨语句的优化,比如把一些计算在编译期就完成。所以对于
getter、setter或者简单的比较函数,内联效果显著。”
New和delete,malloc和free这两种内存释放和创建的区别
这是C++原生操作符与C库函数的区别。
| 特性 | new / delete |
malloc / free |
|---|---|---|
| 语言 | C++ 操作符 | C 库函数 |
| 内存大小 | 自动计算所需大小 | 需手动计算字节数 |
| 返回值 | 返回确切类型指针(如MyClass*) |
返回void*,需强制转换 |
| 构造函数/析构函数 | new会调用构造函数,delete会调用析构函数 |
不调用,只负责原始内存分配/释放 |
| 失败行为 | 抛出std::bad_alloc异常(可捕获) |
返回NULL,需检查 |
| 重载 | 可以重载类级别的operator new/delete |
不可重载 |
| 内存来源 | 可从自由存储区分配(不一定是堆) | 从堆分配 |
| 数组 | 有new[]和delete[]专门处理数组 |
需手动计算总大小,无特别支持 |
核心区别:new/delete理解并管理对象生命周期(构造/析构),而malloc/free只管理原始内存块。
脚本:
“最大的区别在于
new/delete是‘对象感知’的。new在分配内存后会自动调用构造函数来初始化对象,而malloc只分配一块‘生’内存。同样,delete会先调用析构函数清理资源,再释放内存,free则直接释放。所以对于C++类对象,必须使用new/delete。混用会导致构造/析构不被调用,引发资源泄漏。此外,new在失败时抛异常,类型安全,也更符合C++的异常安全编程风格。”
以下是图片中关于 C++ 四种强制转换的内容提取与总结:
一、static_cast
- 用途:用于非多态类型的转换(静态转换),编译器隐式执行的类型转换都可用它。
- 特点:
- 不能用于两个不相关的类型进行转换。
- 适用于以下情况:
- 基础数据类型之间的转换(如 int → float);
- 枚举类型与整数之间的转换;
- 类层次中的上行转换(派生类 → 基类,安全)和下行转换(基类 → 派生类,不安全需谨慎);
- 用户定义的转换操作符;
void*与具体类型指针之间的转换。
二、reinterpret_cast
- 用途:提供底层位模式的重新解释,用于将一种类型转换为另一种完全不同的类型。
- 特点:
- 可以进行指针与整数之间的转换;
- 可以进行任意指针类型之间的转换;
- 不进行类型检查,使用风险较高。
三、const_cast
- 用途:主要用于删除变量的
const或volatile属性。 - 特点:
- 常用于修改原本声明为
const的变量(需谨慎,可能引发未定义行为); - 不能用于改变变量的类型,仅用于修改常量性。
- 常用于修改原本声明为
四、dynamic_cast
- 用途:用于多态类型之间的转换,尤其适用于将基类指针/引用安全地转换为派生类指针/引用。
- 特点:
- 只能用于含有虚函数的类;
- 转换时会进行运行时类型检查,如果转换失败则返回
nullptr(对指针)或抛出异常(对引用); - 支持向上转换(派生类 → 基类,安全)和向下转换(基类 → 派生类,安全检查)。
五、注意事项
- 强制类型转换会关闭或挂起正常的类型检查,应谨慎使用;
- 每次使用前应考虑是否有其他更安全的方式;
- 如必须使用,应尽量限制其作用域以减少错误;
- 强烈建议:尽量避免使用强制类型转换。
内容由ai生成
核心机制:多态通过**虚函数表(vtable)和虚函数表指针(vptr)**实现。
详细原理:
- 虚函数表创建:编译器为每个包含虚函数的类生成一个虚函数表。这个表是一个函数指针数组,按声明顺序存放类的虚函数地址。
- 虚函数表指针:每个对象在构造时,编译器会插入一个指向该类虚函数表的指针(vptr),通常位于对象内存布局的起始位置。
- 动态绑定过程:
- 通过基类指针/引用调用虚函数时,编译器生成代码:通过对象的vptr找到虚函数表
- 根据函数在表中的偏移量找到正确的函数地址
- 执行函数调用
- 继承时的vtable:派生类的虚函数表包含:
- 继承的基类虚函数(可被覆盖)
- 派生类新增的虚函数
内存布局示例:
class Base {
public:
virtual void func1();
virtual void func2();
int data;
};
class Derived : public Base {
public:
virtual void func1() override; // 覆盖
virtual void func3(); // 新增
int moreData;
};
// Derived对象内存布局:
// [vptr] -> Derived的vtable
// [Base::data]
// [Derived::moreData]
//
// Derived的vtable:
// [0] &Derived::func1 // 覆盖版本
// [1] &Base::func2 // 继承未覆盖
// [2] &Derived::func3 // 新增虚函数
脚本:
“多态的本质是运行时动态绑定。编译器为每个有虚函数的类建立一个虚函数表,每个对象内部则有一个指向这个表的指针。当通过基类指针调用虚函数时,实际会通过这个指针查表,找到对应派生类的函数实现。这样,相同的接口在不同派生类对象上表现出不同行为。比如
Animal*指针指向Dog对象时调用speak()是’汪汪’,指向Cat对象时是’喵喵’。”
** 虚函数的实现原理**
实现细节:
- 编译期:编译器为每个类生成vtable,存放在程序的静态数据区
- 构造期:在构造函数初始化列表中(编译器隐式添加)初始化vptr
- 调用期:虚函数调用被转换为间接调用
// 源代码:p->virtualFunc(); // 实际执行:(*p->vptr[n])(); // n是virtualFunc在vtable中的索引
关键特性:
- 覆盖(override):派生类vtable中相应位置替换为派生类函数地址
- final关键字:阻止进一步覆盖
- 纯虚函数:vtable中对应位置为0或特殊地址,使类成为抽象类
性能开销:
- 每个对象增加一个指针大小(通常4/8字节)
- 每次调用增加一次间接寻址
- 内联优化受限(多数情况下虚函数不能内联)
脚本:
“虚函数实现的关键是vtable和vptr。每个类有自己的vtable,存储虚函数地址;每个对象有vptr指向所属类的vtable。调用虚函数时,通过vptr找到vtable,再通过偏移找到函数地址。这种间接调用实现了运行时多态。代价是每个对象多了指针开销,函数调用多了一次查表,但这是实现灵活多态的必要成本。”
** STL除了vector以外对哪个比较熟悉(说了map)**
脚本:
“我对STL的关联容器比较熟悉,特别是
map。map是基于红黑树实现的有序关联容器,提供O(log n)的查找、插入和删除操作。在实际项目中经常用它来建立键值映射,比如配置管理、缓存实现等场景。”
** Map的底层实现**
红黑树(Red-Black Tree)特性:
- 平衡性保证:确保树高度为O(log n)
- 五大性质:
- 节点为红或黑
- 根节点为黑
- 叶子节点(NIL)为黑
- 红节点的子节点必须为黑
- 从任一节点到其所有叶子路径的黑色节点数相同
map节点结构:
template<typename Key, typename Value>
struct RBTreeNode {
bool color; // 红/黑
Key key;
Value value;
RBTreeNode* parent;
RBTreeNode* left;
RBTreeNode* right;
};
操作复杂度:
- 查找:O(log n)
- 插入:O(log n) + 最多两次旋转
- 删除:O(log n) + 最多三次旋转
面试脚本示例:
“
map的底层是红黑树,这是一种自平衡二叉搜索树。红黑树通过颜色约束和旋转操作维持平衡,确保最坏情况下的操作复杂度也是O(log n)。每个节点存储键值对,按key排序。插入新节点时,先按BST规则找到位置,插入红色节点,再通过旋转和变色修复可能违反的红黑树性质。这种设计在有序性和性能间取得了很好平衡。”
Map和unordered_map的区别
详细对比:
| 维度 | std::map |
std::unordered_map |
|---|---|---|
| 底层 | 红黑树(平衡BST) | 哈希表(数组+链表/红黑树) |
| 排序 | 按键升序排列(有序) | 无序(依赖哈希函数) |
| 时间复杂度 | O(log n) | 平均O(1),最坏O(n) |
| 空间开销 | 较小(每个节点3指针) | 较大(桶数组+节点) |
| 迭代器 | 稳定(除删除元素外) | 可能失效(rehash时) |
| 键要求 | 需支持<比较 |
需支持哈希和==比较 |
| 内存局部性 | 较差(节点分散) | 较好(桶内连续) |
| 使用场景 | 需要有序遍历/范围查询 | 需要快速查找,不关心顺序 |
哈希表实现细节:
// 简化版哈希表结构
template<typename Key, typename Value>
class HashTable {
std::vector<std::list<std::pair<Key, Value>>> buckets;
size_t bucket_count;
float max_load_factor = 0.75;
// rehash触发条件:size() / bucket_count > max_load_factor
};
脚本:
“
map和unordered_map最核心的区别是有序vs无序。map基于红黑树,保证元素有序,适合需要范围查询或顺序遍历的场景。unordered_map基于哈希表,查找更快但无序。选择时考虑:如果需要顺序或键类型没有好的哈希函数,用map;如果追求查找性能且不关心顺序,用unordered_map。C++11后哈希表实现还引入了桶内红黑树优化,防止哈希冲突导致性能退化。”
用过链表吗,单向链表和双向链表的区别
详细对比:
| 特性 | 单向链表 | 双向链表 |
|---|---|---|
| 节点结构 | {data, next} |
{data, prev, next} |
| 内存占用 | 较小(少一个指针) | 较大(多33%指针开销) |
| 遍历方向 | 只能单向(从头到尾) | 双向(可向前向后) |
| 删除节点 | 需找到前驱,O(n) | 直接操作,O(1)(已知节点时) |
| 插入节点 | 需前驱节点 | 可直接插入前后 |
| 应用场景 | 简单队列、较少删除 | 需要频繁插入删除、LRU缓存 |
实现示例:
// 单向链表节点
template<typename T>
struct SinglyNode {
T data;
SinglyNode* next;
void insertAfter(T value) {
SinglyNode* newNode = new SinglyNode{value, this->next};
this->next = newNode;
}
};
// 双向链表节点
template<typename T>
struct DoublyNode {
T data;
DoublyNode* prev;
DoublyNode* next;
void insertBefore(T value) {
DoublyNode* newNode = new DoublyNode{value, this->prev, this};
this->prev->next = newNode;
this->prev = newNode;
}
};
脚本:
“单向链表每个节点只有一个next指针,实现简单,内存开销小,但操作受限。比如删除节点必须从头遍历找前驱。双向链表有prev和next两个指针,可以双向遍历,任意节点操作都是O(1),但内存多一个指针开销。STL的list是双向链表,适合频繁插入删除。单向链表适合实现简单栈或队列,或者内存严格受限的环境。”
Vector和数组的区别
深入对比:
| 维度 | std::vector |
原始数组 |
|---|---|---|
| 内存管理 | 自动分配/释放,可动态扩容 | 手动管理(栈/堆) |
| 大小信息 | 自带size()、capacity() |
需额外变量记录大小 |
| 越界检查 | at()提供边界检查(抛异常) |
无检查,可能内存错误 |
| 复制语义 | 深拷贝(可拷贝构造) | 浅拷贝(指针复制) |
| 类型安全 | 模板类型安全 | 可能类型不匹配 |
| 迭代器 | 完整迭代器支持(begin/end) | 仅指针算术 |
| 函数传递 | 保持类型信息 | 退化为指针,丢失大小 |
| 内存连续性 | 保证连续,可兼容C API | 连续,但可能碎片化 |
vector扩容机制:
// 典型扩容策略:2倍或1.5倍增长
void push_back(const T& value) {
if (size == capacity) {
// 扩容:申请新内存,拷贝元素,释放旧内存
size_t new_capacity = max(2 * capacity, 1);
T* new_data = allocator.allocate(new_capacity);
// ... 拷贝构造元素
allocator.deallocate(old_data, capacity);
data = new_data;
capacity = new_capacity;
}
// 在末尾构造新元素
allocator.construct(&data[size++], value);
}
脚本:
“vector和数组核心区别在于动态性和安全性。vector是封装好的动态数组,自动管理内存,可以动态增长,提供边界检查,还带有大小信息。原始数组大小固定,没有边界保护,传递时退化为指针丢失大小信息。现代C++几乎总是用vector替代原始数组,除非有特殊性能要求或与C库交互。vector的连续内存特性也让它兼容需要指针和长度的C风格API。”
** 线程和进程的区别**
系统级对比:
| 维度 | 进程 | 线程 |
|---|---|---|
| 定义 | 资源分配的基本单位 | CPU调度的基本单位 |
| 地址空间 | 独立虚拟地址空间 | 共享进程地址空间 |
| 通信成本 | 高(IPC:管道、共享内存等) | 低(共享内存直接访问) |
| 创建开销 | 大(复制页表、文件描述符等) | 小(仅栈和上下文) |
| 稳定性 | 一个进程崩溃不影响其他进程 | 一个线程崩溃可能终止整个进程 |
| 切换开销 | 大(TLB刷新、上下文切换) | 小(共享地址空间) |
| 资源拥有 | 独立资源(内存、文件、信号等) | 共享进程资源 |
| 并发性 | 进程间并发 | 线程间并发+并行 |
内存布局对比:
进程A: 进程B:
[代码段] [代码段]
[数据段] [数据段]
[堆] [堆]
[栈-主线程] [栈-主线程]
多线程进程:
[代码段]
[数据段]
[堆]
[栈-线程1]
[栈-线程2]
[栈-线程3]
(共享:代码、数据、堆)
(私有:栈、寄存器)
脚本:
“进程像是独立的房子,有自己完整的空间和设施;线程像是同一房子里的室友,共享客厅厨房但有自己的卧室。进程间完全隔离,一个崩溃不会影响其他,但通信需要’敲门’(IPC)。线程共享内存,通信方便,但一个线程野指针可能破坏共享数据导致整个进程崩溃。现代应用通常混合使用:多进程保证稳定性(如Chrome每个标签页一个进程),多线程提高性能(如服务器用线程池处理请求)。”
** 子进程崩溃了对父进程有没有影响**
详细分析:
正常情况(无影响):
// 父进程继续运行,子进程成为僵尸
pid_t pid = fork();
if (pid == 0) {
// 子进程:执行可能崩溃的操作
*(int*)0 = 42; // 段错误
} else {
// 父进程:继续执行,不受影响
sleep(1);
printf("Parent still alive\n");
}
可能的影响:
-
僵尸进程积累:父进程不wait,子进程保持僵尸状态
# 僵尸进程显示为<defunct> $ ps aux | grep defunct user 1234 0.0 0.0 0 0 pts/0 Z+ 00:00 0:00 [child] <defunct> -
共享资源未清理:
// 共享文件描述符未关闭 int pipefd[2]; pipe(pipefd); if (fork() == 0) { close(pipefd[0]); // 子进程关闭读端 // 崩溃... 写端未关闭 } // 父进程读管道可能永远阻塞 -
信号传递:默认子进程终止发SIGCHLD给父进程
// 父进程可捕获SIGCHLD signal(SIGCHLD, [](int sig) { while (waitpid(-1, NULL, WNOHANG) > 0); }); -
进程组影响:子进程可能修改终端设置影响父进程
// 子进程修改终端属性后崩溃 tcgetattr(STDIN_FILENO, &old_termios); // 修改termios... // 崩溃!终端状态可能异常
最佳实践:
// 正确处理子进程终止
class ChildProcess {
pid_t pid;
int status;
~ChildProcess() {
if (pid > 0) {
kill(pid, SIGTERM); // 先尝试终止
sleep(1);
kill(pid, SIGKILL); // 强制终止
waitpid(pid, &status, 0); // 回收
}
}
};
脚本:
“从隔离性看,子进程崩溃通常不影响父进程,因为它们是独立地址空间。但有几个间接影响:一是僵尸进程积累占用系统资源;二是共享资源(文件描述符、共享内存)可能遗留问题;三是如果子进程修改了共享状态(如终端设置)后崩溃,父进程会继承异常状态。好的做法是父进程监控子进程,用wait回收资源,设置SIGCHLD处理器,并清理共享资源。在守护进程等场景,还需要处理孤儿进程问题。”
总结建议:
面试时回答技术问题要:
- 先给核心定义,明确概念
- 分点说明关键特性,对比差异
- 结合实际应用场景和使用经验
- 提及注意事项和最佳实践
- 适当用代码示例或比喻辅助说明
以下是针对这些面试题的回答,力求清晰、准确、有条理,符合面试场景的要求。
如何在类的内部返回一个指向自己的智能指针
如果类对象本身已经被一个std::shared_ptr管理,并且你需要在类的一个成员函数中返回指向当前对象的shared_ptr,不能直接返回this的shared_ptr(因为会创建一个新的、独立的控制块,导致重复释放)。正确的做法是让该类**继承自std::enable_shared_from_this<T>**模板,然后使用其提供的shared_from_this()成员函数。
#include <memory>
class MyClass : public std::enable_shared_from_this<MyClass> {
public:
std::shared_ptr<MyClass> getSelfSharedPtr() {
// 安全地返回一个指向当前对象的shared_ptr
return shared_from_this();
}
};
// 使用
auto obj = std::make_shared<MyClass>();
auto selfPtr = obj->getSelfSharedPtr(); // 正确,共享所有权
前提:调用shared_from_this()时,对象必须已经被一个std::shared_ptr管理(即已经有一个控制块存在),否则会抛出std::bad_weak_ptr异常。
脚本:
“如果一个对象需要从成员函数中安全地返回指向自己的
shared_ptr,标准做法是让这个类公有继承std::enable_shared_from_this。然后就可以在成员函数里调用shared_from_this()来获得一个共享所有权的智能指针。这背后的原理是,enable_shared_from_this在对象里存储了一个弱引用,shared_from_this()通过这个弱引用生成一个新的shared_ptr,并与已有的控制块共享所有权。关键点是,对象必须已经由某个shared_ptr管理,否则调用shared_from_this()会抛异常。”
结构体大小的内存排序规则
结构体(或类)的大小并非简单等于各成员大小之和,因为它受到内存对齐规则的约束。主要规则如下:
- 对齐值(Alignment):每个成员都有一个对齐要求,通常是其自身大小(如
int为4)和平台/编译器指定对齐值中的较小者。 - 起始地址规则:每个成员的起始地址必须是其对齐值的整数倍。
- 整体大小规则:整个结构体的总大小必须是其最宽成员对齐值的整数倍。编译器可能会在末尾添加填充字节以满足此要求。
- 成员顺序影响:由于对齐填充的存在,成员的声明顺序会影响结构体总大小。将大小相近的成员声明在一起,可以最大限度地减少填充字节,优化内存使用。
示例(在64位系统,假设int为4,double为8):
struct BadOrder {
char a; // 1字节
// 填充3字节以满足int的4字节对齐
int b; // 4字节
double c; // 8字节
}; // 总大小可能是 1 + 3(pad) + 4 + 8 = 16? 不,整体还需是8的倍数,最终可能是24?实际需要计算。
// 更好的顺序:
struct GoodOrder {
double c; // 8
int b; // 4
char a; // 1
// 末尾填充3字节,使总大小为8的倍数
}; // 总大小可能是 8 + 4 + 1 + 3(pad) = 16
脚本:
“结构体大小由内存对齐规则决定。简单说,每个成员要放在其自身大小整数倍的地址上。比如一个
char(1字节)后面跟一个int(4字节),编译器会在char后面插入3个字节的填充,让int从4字节边界开始。最后,整个结构体的大小还得是最宽成员对齐值的整数倍,所以末尾可能还有填充。因此,调整成员顺序,把大的、对齐要求高的放前面,把小的放后面,可以节省内存,这叫‘结构体成员重排优化’。”
介绍一下DHCP网络协议
DHCP (Dynamic Host Configuration Protocol,动态主机配置协议) 是一个应用层协议,用于在局域网内自动分配IP地址和其他网络配置参数(如子网掩码、默认网关、DNS服务器)给客户端设备。
主要工作流程(DORA过程):
- Discover (发现):新接入网络的客户端(无IP)广播一个
DHCP Discover报文,寻找DHCP服务器。 - Offer (提供):局域网内的DHCP服务器收到后,从地址池中挑选一个可用IP,广播
DHCP Offer报文回应客户端(包含提供的IP和配置)。 - Request (请求):客户端可能收到多个Offer,它选择其中一个,并广播
DHCP Request报文,正式请求使用该IP,并告知所有服务器其选择。 - Acknowledge (确认):被选中的服务器广播
DHCP Ack报文,确认分配,并将租约信息(IP租用期等)告知客户端。其他服务器收回它们的Offer。
特点与优势:
- 即插即用:用户无需手动配置网络。
- IP地址高效管理:IP地址可以复用,服务器可以回收不再使用的地址。
- 支持租约:分配的IP有有效期,客户端需定期续租,保证了地址的流动性。
- 支持中继:通过DHCP中继代理,可以跨网段为客户端分配地址。
脚本:
“DHCP是一个用于自动配置网络参数的核心协议。当一个设备,比如笔记本电脑,连上Wi-Fi时,它就会启动DHCP的‘四步舞’:首先广播‘谁有IP?’(Discover),服务器回应‘我给你这个IP’(Offer),客户端说‘我就要这个了’(Request),最后服务器确认‘好的,租给你一段时间’(Ack)。这样就自动获得了IP、网关、DNS等信息。它的好处显而易见:大大简化了网络管理,避免了IP冲突,并通过租约机制实现了IP资源的动态回收和再利用。”
** C++强制类型转换和C语言类型转换的区别**
C++引入了四种命名明确的强制类型转换操作符,以替代C风格(type)value的粗犷和危险做法。
static_cast:最常用,用于相关类型间明确的转换。如数值类型转换(int->double)、void*指针转换、有继承关系的类指针/引用向下转换(但不进行运行时检查)。dynamic_cast:专门用于有虚函数的继承体系中,将基类指针/引用安全地转换为派生类指针/引用。会在运行时检查转换是否安全,不安全则返回nullptr(对指针)或抛出异常(对引用)。const_cast:用于移除或添加const和volatile限定符。这是唯一能操作常量性的转换。reinterpret_cast:最低层的重新解释,将数据按位模式解释为另一种类型。如指针与整数间的转换、不相关指针类型间的转换。非常危险,应极谨慎使用。
对比C风格转换:C风格(type)value相当于尝试const_cast -> static_cast -> reinterpret_cast的合集,功能强大但不安全、不清晰,在代码中难以搜索和定位。
脚本:
“C++引入新的类型转换主要是为了安全性和可读性。C风格的转换
(int*)ptr太强大也太模糊,它可能同时做了数值转换、常量性去除和指针重解释,在代码审查或维护时很难一眼看出意图和风险。C++的四种cast各司其职:static_cast做明确的常规转换,dynamic_cast用于安全的多态向下转型,const_cast专门修改常量性,reinterpret_cast是底层的位模式重解释。这样代码意图清晰,也便于用工具搜索和检查。”
** 智能指针介绍**
智能指针是RAII(资源获取即初始化)思想在指针管理上的体现,用于自动管理动态内存,防止内存泄漏。C++11主要提供三种:
std::unique_ptr:独占所有权的智能指针。同一时刻只能有一个unique_ptr指向一个对象。当unique_ptr被销毁时,它所管理的对象也会被自动销毁。不支持拷贝,只支持移动。轻量高效,是默认选择。std::shared_ptr:共享所有权的智能指针。通过引用计数跟踪有多少个shared_ptr指向同一对象。当最后一个shared_ptr被销毁时,对象才会被销毁。支持拷贝和移动。开销比unique_ptr大。std::weak_ptr:弱引用指针,不增加引用计数。它用于解决shared_ptr可能导致的循环引用问题。weak_ptr必须通过lock()方法转换为shared_ptr才能访问所指向的对象,这可以检查对象是否已被销毁。
核心目的:确保动态分配的资源在异常发生时也能被正确释放。
脚本:
“智能指针是现代C++管理动态内存的首选工具。
unique_ptr表达独占所有权,性能接近裸指针,用于明确的单一所有者场景。shared_ptr用于需要共享所有权的场景,它通过引用计数自动释放内存,但要注意循环引用问题。weak_ptr就是为解决循环引用而生的,它作为观察者不增加计数。使用它们可以极大地减少内存泄漏和悬空指针的问题,是编写异常安全代码的重要部分。”
19. 使用过QT吗
如果用过:
// QT核心特性经验
class MyQtApp : public QApplication {
// 信号槽使用经验
Q_OBJECT
public:
void init() {
connect(button, &QPushButton::clicked,
this, &MyQtApp::onButtonClicked);
// Lambda信号槽
connect(slider, &QSlider::valueChanged,
[this](int value) { updateValue(value); });
// 跨线程信号槽
Worker* worker = new Worker;
worker->moveToThread(workerThread);
connect(workerThread, &QThread::started,
worker, &Worker::process);
connect(worker, &Worker::finished,
this, &MyQtApp::handleResults);
}
// 自定义信号
signals:
void dataReady(const QByteArray& data);
// 自定义槽
public slots:
void onDataReceived(const QByteArray& data) {
emit dataReady(processData(data));
}
};
// QT元对象系统
class MyClass : public QObject {
Q_OBJECT
Q_PROPERTY(QString name READ getName WRITE setName NOTIFY nameChanged)
Q_PROPERTY(int value READ getValue WRITE setValue)
public:
// 反射能力
const QMetaObject* meta = metaObject();
for (int i = 0; i < meta->propertyCount(); ++i) {
QMetaProperty prop = meta->property(i);
qDebug() << prop.name() << prop.read(this);
}
};
项目经验模板:
“是的,我用QT开发过[项目名称],主要功能是[简要描述]。使用了QT的[具体模块,如Widgets、Network、SQL等]。在开发过程中,我深入使用了信号槽机制实现模块解耦,用Model/View框架处理数据展示,通过多线程和事件循环保证UI响应。还涉及[高级特性,如QML、QtQuick、自定义控件等]。”
20. 对QT有什么了解(技术架构)
QT技术栈全景:
// 1. 核心模块
// - Core: 事件循环、对象模型、容器类
// - GUI: 窗口系统集成、OpenGL集成
// - Widgets: 传统桌面UI控件
// 2. 跨平台抽象
class QtPlatform {
// 事件系统
bool event(QEvent* e) override {
switch (e->type()) {
case QEvent::MouseButtonPress:
return mousePressEvent(static_cast<QMouseEvent*>(e));
case QEvent::KeyPress:
return keyPressEvent(static_cast<QKeyEvent*>(e));
default:
return QObject::event(e);
}
}
// 绘图系统
void paintEvent(QPaintEvent*) override {
QPainter painter(this);
painter.setRenderHint(QPainter::Antialiasing);
// 统一绘图API,自动适配平台
}
};
// 3. 信号槽实现原理
// 预处理阶段:moc生成元对象代码
// 连接阶段:建立信号发射器与槽的连接
// 运行阶段:通过QMetaObject::activate发射信号
// 4. 现代QT技术
// - QML: 声明式UI
// - QtQuick: 硬件加速的UI框架
// - Qt3D: 3D图形
// - QtWebEngine: Chromium嵌入
// 5. 企业级特性
// - 国际化(i18n)
// - 样式表(QSS)
// - 插件系统
// - 自动化测试框架
QT最佳实践:
// 1. 资源管理
class ResourceManager {
QScopedPointer<QFile> file; // 自动释放
QSharedPointer<QImage> image; // 引用计数
// RAI惯用法
QMutexLocker locker(&mutex); // 自动加锁解锁
};
// 2. 线程安全
class ThreadSafeObject : public QObject {
Q_OBJECT
public:
void process() {
// 确保在对象所在线程执行
QMetaObject::invokeMethod(this, "doProcess",
Qt::QueuedConnection);
}
private slots:
void doProcess() {
// 在正确线程中执行
}
};
// 3. 性能优化
void optimizePerformance() {
// 启用双缓冲
widget->setAttribute(Qt::WA_OpaquePaintEvent);
widget->setAttribute(Qt::WA_NoSystemBackground);
// 使用QGraphicsView处理大量图元
// 使用OpenGL进行硬件加速
}
面试脚本总结:
“QT是一个完整的跨平台应用开发框架,不仅仅是GUI库。它的核心是元对象系统,支持信号槽、属性系统、运行时类型信息。现代QT包括传统的Widgets和新的QML/Quick双轨体系。QT提供统一的API抽象底层平台差异,支持Windows/macOS/Linux/Android/iOS。在企业开发中,QT的国际化、样式化、插件系统等特性非常实用。学习曲线较陡,但生产力很高。”
面试策略总结:
- 回答问题结构:定义 → 原理 → 应用 → 注意事项
- 展示深度:不仅知道"是什么",还要知道"为什么"和"怎么用"
- 结合实际:用项目经验或代码示例说明
- 展现思考:讨论权衡、替代方案、最佳实践
- 保持更新:提及C++17/20/23新特性
18. 内存对齐的理解(高级话题)
C++11/17/20对齐支持:
#include <new>
#include <cstddef>
// 1. alignas关键字
struct alignas(64) CacheLineAligned {
int data[16];
}; // 64字节对齐,适合缓存行
// 2. std::aligned_storage (C++11)
std::aligned_storage<sizeof(MyClass), alignof(MyClass)>::type storage;
new(&storage) MyClass(); // placement new
// 3. std::aligned_alloc (C++17)
void* ptr = std::aligned_alloc(64, 1024); // 64字节对齐,分配1024字节
// 4. hardware_destructive_interference_size (C++17)
struct ThreadData {
alignas(std::hardware_destructive_interference_size)
int counter; // 避免伪共享
char padding[std::hardware_destructive_interference_size - sizeof(int)];
};
// 5. SIMD对齐
struct alignas(32) Vec8f {
float data[8]; // 适合AVX指令
};
// 自定义对齐分配器
template<typename T, std::size_t Alignment>
class AlignedAllocator {
public:
using value_type = T;
template<typename U>
struct rebind { using other = AlignedAllocator<U, Alignment>; };
T* allocate(std::size_t n) {
return static_cast<T*>(
std::aligned_alloc(Alignment, n * sizeof(T))
);
}
void deallocate(T* p, std::size_t) {
std::free(p);
}
};
using AlignedVector = std::vector<int, AlignedAllocator<int, 64>>;
内存对齐优化示例:
// 糟糕的内存布局
struct BadLayout {
bool flag; // 1字节
double value; // 8字节,需要7字节填充
int count; // 4字节
char name[3]; // 3字节
}; // 总大小:1 + 7 + 8 + 4 + 3 + 5(padding) = 28字节
// 优化的内存布局
struct GoodLayout {
double value; // 8字节
int count; // 4字节
char name[3]; // 3字节
bool flag; // 1字节
}; // 总大小:8 + 4 + 3 + 1 + 0(padding) = 16字节
// 更小,无填充,缓存友好
// 使用编译器指令(GCC/Clang)
struct PackedData {
int a;
char b;
double c;
} __attribute__((packed)); // 取消填充,但可能降低性能
// 平台特定对齐
#ifdef _MSC_VER
__declspec(align(64)) struct AlignedStruct { /* ... */ };
#endif
面试脚本补充:
“内存对齐不仅影响大小,还影响性能。现代CPU以缓存线(通常64字节)为单位读取内存。跨缓存线的数据需要两次读取。C++11引入alignas,C++17引入硬件干扰大小常量。结构体成员应按对齐大小降序排列以减少填充。对于并行访问的数据,应该用不同的缓存线避免伪共享。但过度对齐可能浪费内存,需要平衡。”
面试脚本:C++/系统设计/网络/数据库综合面试
面试官开场
面试官:你好,欢迎参加今天的面试。首先我会问一些C++基础问题,然后是系统设计、网络和数据库相关的内容。请放松,我们开始吧。
2、指针和引用的区别,各自的优缺点
面试官:我们先从C++基础开始。指针和引用是C++中非常重要的概念,你能详细说一下它们的区别和各自的优缺点吗?
面试者:
好的。指针和引用都是C++中用于间接访问变量的机制,但它们有本质区别:
核心区别:
- 本质不同:指针是一个变量,存储的是另一个变量的内存地址;引用是一个别名,是已存在变量的另一个名字。
- 初始化要求:指针可以不初始化或初始化为nullptr;引用必须在定义时初始化,且不能重新绑定到其他对象。
- 操作方式:对指针使用
*解引用获取值,&获取地址;对引用的操作直接作用于绑定的对象。 - 可为空性:指针可以为空;引用不能为空(语言层面保证)。
- 多级性:可以有多级指针;没有多级引用(虽然有
int&&,但那是右值引用)。
优缺点:
-
指针优点:
- 灵活,可以改变指向
- 支持算术运算(如
p++遍历数组) - 可以表示"无"的状态(nullptr)
- 是实现动态内存管理和多态的基础
-
指针缺点:
- 容易出错:空指针解引用、野指针、内存泄漏
- 代码可读性有时较差
- 需要手动管理内存
-
引用优点:
- 更安全:必须初始化且不能为空
- 语法更清晰:无需解引用符号
- 在函数传参时更直观,尤其是
const引用
-
引用缺点:
- 不够灵活:一旦绑定不能更改
- 不能表示"无"的状态
- 不支持算术运算
面试官:好的,那么引用的底层是如何实现的呢?
面试者:
在绝大多数编译器的实现中,引用底层就是通过指针实现的。编译器会在符号表中将引用名与对应指针关联,当操作引用时,编译器会自动进行解引用操作。比如:
int a = 10;
int &r = a; // 底层:int* const pr = &a;
r = 20; // 底层:*pr = 20;
但在语言特性上,引用是变量的别名,不是对象,没有自己的存储空间(虽然实现上可能占用指针大小的空间)。
面试官:那为什么指针在32位系统下占4字节,64位下占8字节?
面试者:
这是因为指针存储的是内存地址:
- 32位系统:使用32位(4字节)地址来寻址,理论寻址空间为2^32=4GB,所以指针需要4字节存储任意一个可能地址。
- 64位系统:使用64位(8字节)地址来寻址,理论寻址空间巨大(2^64),所以指针需要8字节。虽然实际硬件可能不支持完整64位物理寻址,但指针在逻辑上保持8字节以保证一致性和未来扩展。
3、栈内存和堆内存,分配和释放的方式
面试官:接下来我们聊聊内存管理。栈内存和堆内存在分配和释放方式上有什么不同?
面试者:
栈内存和堆内存是两种不同的内存管理方式:
栈内存:
- 分配:由编译器自动管理,通过移动栈指针完成
- 释放:函数返回时自动释放,通过移动栈指针回退
- 特点:
- 生命周期与作用域绑定
- 分配速度快(只是移动指针)
- 大小有限(通常几MB)
- 内存连续
- 使用场景:函数调用、局部变量、函数参数
堆内存:
- 分配:手动通过
new/malloc等操作申请 - 释放:手动通过
delete/free释放 - 特点:
- 生命周期由程序员控制
- 空间大(受虚拟内存限制)
- 分配速度较慢(涉及系统调用)
- 可能产生内存碎片
- 使用场景:动态数据结构、大对象、需要在不同作用域共享的对象
面试官:那么,当我们申请堆内存时,申请的是真实物理内存吗?
面试者:
申请的是虚拟内存。现代操作系统使用虚拟内存管理:
- 当调用
malloc或new时,操作系统在进程的虚拟地址空间中分配一段地址范围 - 更新进程的页表,标记这些地址"未映射到物理内存"
- 只有在首次访问这些内存时,才会触发缺页异常,操作系统才会分配实际的物理内存页并建立映射
这种按需分配的策略避免了不必要的物理内存占用。
面试官:你能描述一下从分配内存到访问内存的完整过程吗?
面试者:
以malloc(1024)为例:
-
申请阶段:
- 程序调用
malloc(1024) - C运行时库在堆管理数据结构中寻找足够大的空闲虚拟内存块
- 如果找不到,通过
brk或mmap系统调用向操作系统申请扩大堆空间 - 操作系统更新进程虚拟内存布局,返回虚拟地址
- 程序调用
-
首次访问阶段(关键步骤):
- 程序首次读写返回的地址
- CPU通过页表查找物理地址,发现该虚拟页无物理映射
- 触发缺页异常(page fault)
- 操作系统中断处理程序:
a. 分配一个空闲的物理内存页
b. 将该物理页与虚拟页建立映射
c. 更新页表 - 重新执行访存指令,此时可以正常读写
面试官:如果数据不在内存中(比如在磁盘上),如何加载到内存?
面试者:
这通常发生在内存映射文件或动态链接库加载的场景:
- 操作系统将文件/库映射到进程的虚拟地址空间
- 当进程访问这些映射区域时,触发缺页异常
- 操作系统识别到这是文件映射页:
- 从磁盘读取对应的文件块到物理内存
- 建立虚拟地址到物理内存的映射
- 这样文件内容就像内存一样被访问
- 对于只读数据,多个进程可以共享同一物理页,提高效率
面试官:你提到了内存泄漏,在实际开发中如何快速定位内存泄漏的地方?
面试者:
定位内存泄漏我会采取以下策略:
首选工具化方案:
-
Valgrind (Memcheck) - Linux下经典工具
valgrind --leak-check=full ./my_program它会报告泄漏内存的分配调用栈。
-
AddressSanitizer (ASan) - GCC/Clang内置工具
g++ -fsanitize=address -g my_program.cpp -o my_program ./my_program速度比Valgrind快,会在程序退出时输出泄漏报告。
-
Visual Studio Diagnostic Tools - Windows下内置工具
手动排查方法:
-
代码审查重点:
- 检查每个
new/malloc是否有对应的delete/free - 检查容器中存储的指针是否在容器销毁前释放
- 检查异常安全:异常发生时资源能否被释放
- 检查每个
-
重载
new/delete记录分配:static std::map<void*, std::string> allocation_map; void* operator new(size_t size, const char* file, int line) { void* ptr = malloc(size); allocation_map[ptr] = std::string(file) + ":" + std::to_string(line); return ptr; } // 类似的operator delete记录释放
面试官:如何从设计上避免内存泄漏问题?
面试者:
我的经验是遵守现代C++最佳实践:
-
优先使用RAII和智能指针
- 局部资源用栈对象管理
- 动态资源用
std::unique_ptr、std::shared_ptr - 示例:
std::unique_ptr<Connection> conn = make_unique<Connection>();
-
明确所有权语义
- 单一所有权用
unique_ptr - 共享所有权用
shared_ptr(注意循环引用问题) - 观察但不拥有用
weak_ptr
- 单一所有权用
-
使用容器管理对象而非原始指针
// 推荐 std::vector<std::unique_ptr<Player>> players; // 而不是 std::vector<Player*> players; -
异常安全设计
- 使用智能指针保证即使异常发生也能释放资源
- 示例:
void process() { auto resource = std::make_unique<Resource>(); // 异常安全 // 即使这里抛出异常,resource也会被正确释放 } -
建立代码规范
- 禁止裸
new/delete(特殊场景需审批) - 定期进行代码审查
- 在CI/CD中加入内存检测工具
- 禁止裸
4、RAII思想
面试官:你刚刚提到了RAII,能详细解释一下这个思想吗?
面试者:
RAII(Resource Acquisition Is Initialization)是C++的核心编程理念,意思是资源获取即初始化。其核心思想是:
-
将资源生命周期与对象生命周期绑定
- 在对象构造函数中获取资源
- 在对象析构函数中释放资源
-
保证资源的正确释放
- 无论函数正常返回还是异常退出
- 局部对象都会析构,从而释放资源
经典示例:
class FileHandle {
private:
FILE* file_;
public:
// 构造函数获取资源
explicit FileHandle(const char* filename)
: file_(fopen(filename, "r")) {
if (!file_) throw std::runtime_error("Failed to open file");
}
// 析构函数释放资源
~FileHandle() {
if (file_) fclose(file_);
}
// 禁止拷贝
FileHandle(const FileHandle&) = delete;
FileHandle& operator=(const FileHandle&) = delete;
// 允许移动
FileHandle(FileHandle&& other) noexcept
: file_(other.file_) {
other.file_ = nullptr;
}
void read() { /* 使用file_ */ }
};
void processFile() {
FileHandle fh("data.txt"); // 打开文件
fh.read(); // 使用文件
// 函数结束,fh析构,自动关闭文件
// 即使read()抛出异常,文件也会被关闭
}
RAII的优势:
- 异常安全:保证异常发生时资源被释放
- 代码清晰:资源管理逻辑封装在类内部
- 避免泄漏:自动管理资源生命周期
STL中的std::fstream、std::lock_guard、智能指针都是RAII的典型实现。
5、智能指针有哪几种,以及各自的应用场景
面试官:C++中有哪些智能指针,各自的应用场景是什么?
面试者:
C++11引入了三种主要的智能指针:
-
std::unique_ptr- 特点:独占所有权,不可拷贝,只可移动
- 应用场景:
- 函数内部创建对象并返回给调用者
- 类的成员变量,表示类独占某个资源
- 替代有问题的
std::auto_ptr
- 示例:
std::unique_ptr<Connection> createConnection() { return std::make_unique<Connection>(); } -
std::shared_ptr- 特点:共享所有权,引用计数管理
- 应用场景:
- 多个对象需要共享同一资源
- 缓存系统,不确定谁最后使用
- 注意:避免循环引用(会导致内存泄漏)
- 示例:
class Player; class GameRoom { std::vector<std::shared_ptr<Player>> players; }; -
std::weak_ptr- 特点:弱引用,不增加引用计数
- 应用场景:
- 打破
shared_ptr的循环引用 - 缓存观察者,不干预对象生命周期
- 打破
- 示例:
class Observer { std::weak_ptr<Subject> subject_; public: void notify() { if (auto s = subject_.lock()) { s->update(); } } };
智能指针选择指南:
- 默认首选
unique_ptr(单一所有权) - 需要共享时用
shared_ptr(共享所有权) - 需要观察但不拥有时用
weak_ptr(弱引用) - 只有在与C接口交互等特殊场景才考虑原生指针
面试官:原生指针和智能指针各有什么优缺点?
面试者:
原生指针:
- 优点:
- 零开销:没有额外内存或性能成本
- 灵活:支持指针算术、任意转换
- 兼容性:与C语言接口完美兼容
- 底层控制:适合系统编程、嵌入式等场景
- 缺点:
- 易出错:空指针、野指针、内存泄漏
- 所有权不清晰:不知道谁负责释放
- 非异常安全:异常发生时可能泄漏
智能指针:
- 优点:
- 自动管理:减少内存泄漏风险
- 明确语义:
unique_ptr(独占)、shared_ptr(共享) - 异常安全:保证异常发生时资源被释放
- 代码更安全:现代C++最佳实践
- 缺点:
- 性能开销:引用计数的原子操作(虽然很小)
- 不够灵活:不支持指针算术
- 循环引用:
shared_ptr可能产生循环引用(需用weak_ptr解决)
我的原则:默认使用智能指针,在必须使用原生指针的场合(性能关键、与C库交互)谨慎使用,并添加明确注释。
6、C++中多态是怎么实现的
面试官:C++的多态是如何实现的?
面试者:
C++的多态(运行时多态)主要通过虚函数机制实现,具体来说:
实现机制:
-
虚函数声明:在基类中用
virtual关键字声明函数class Shape { public: virtual void draw() const = 0; // 纯虚函数 virtual ~Shape() {} // 虚析构函数 }; -
关键数据结构:
- 虚函数表(vtable):编译器为每个多态类生成一个函数指针数组
- 虚函数表指针(vptr):每个对象内含一个指向vtable的指针
-
内存布局示例:
对象内存布局: +----------------+ | vptr | --> 指向Shape的vtable +----------------+ | 对象数据 | +----------------+ Shape的vtable: +----------------+ | &Shape::~Shape | +----------------+ | &Shape::draw | +----------------+ -
调用过程(
shapePtr->draw()):- 通过对象的
vptr找到vtable - 在vtable中找到
draw函数的地址 - 调用该地址对应的函数(可能是派生类重写的版本)
- 通过对象的
面试官:虚函数会增加多少内存开销?
面试者:
内存开销来自两方面:
-
类级别开销(vtable):
- 每个多态类有一个vtable,存储在程序的只读数据段
- 不计入单个对象内存,由所有该类的对象共享
-
对象级别开销(vptr):
- 每个多态类的对象有一个vptr
- 32位系统:通常4字节
- 64位系统:通常8字节
- 注意:多重继承时,一个对象可能有多个vptr
示例计算:
class Base {
virtual void func() {}
int data;
};
// 32位系统:vptr(4) + data(4) = 8字节(考虑对齐)
// 如果没有虚函数:只有data(4)字节
面试官:vtable和vptr是每个类一份还是每个对象一份?
面试者:
-
vtable(虚函数表):每个类一份
- 同一个类的所有对象共享同一个vtable
- vtable在编译时生成,存储在只读内存段
-
vptr(虚函数表指针):每个对象一份
- 每个对象都有自己独立的vptr
- vptr指向该对象所属类的vtable
- vptr在对象构造时被设置
验证示例:
Base obj1, obj2;
// obj1和obj2的vptr值相同(都指向Base的vtable)
// 但obj1和obj2各自存储自己的vptr副本
7、设计模式用过哪些
面试官:在实际项目中,你用过哪些设计模式?
面试者:
我常用的设计模式包括:
- 单例模式 - 配置管理、日志系统
- 工厂模式 - 对象创建、插件系统
- 观察者模式 - 事件处理、消息通知
- 策略模式 - 算法选择、支付方式
- 适配器模式 - 接口兼容、旧系统集成
- RAII模式 - 资源管理(C++特有)
实际项目经验:
- 在游戏服务器中,用观察者模式实现玩家事件通知
- 用工厂模式创建不同类型的网络连接
- 用策略模式实现不同的AI行为算法
面试官:详细讲一下单例模式的实现方式。
面试者:
单例模式确保一个类只有一个实例。现代C++推荐使用 Meyers’ Singleton:
class Singleton {
public:
// 获取唯一实例
static Singleton& getInstance() {
static Singleton instance; // C++11保证线程安全
return instance;
}
// 删除拷贝构造函数和赋值运算符
Singleton(const Singleton&) = delete;
Singleton& operator=(const Singleton&) = delete;
void doSomething() { /* ... */ }
private:
Singleton() = default; // 私有构造函数
~Singleton() = default;
// 成员变量
std::map<std::string, std::string> config_;
};
关键点:
- 局部静态变量:C++11保证初始化线程安全
- 懒加载:第一次调用
getInstance()时才创建 - 自动析构:程序结束时自动调用析构函数
- 防拷贝:删除拷贝构造函数和赋值运算符
线程安全分析:
- C++11标准规定:局部静态变量初始化是线程安全的
- 编译器会生成线程安全的初始化代码
- 比双重检查锁定(Double-Checked Locking)更简洁安全
需要参数的情况:
class ConfigManager {
public:
static ConfigManager& getInstance(const std::string& configPath = "") {
static ConfigManager instance(configPath);
return instance;
}
private:
ConfigManager(const std::string& path) {
// 加载配置
}
};
8、STL中容器用过几种
面试官:你用过STL中的哪些容器?
面试者:
我常用的STL容器可以分为几类:
序列容器:
vector- 动态数组,最常用list- 双向链表deque- 双端队列array- 固定大小数组(C++11)
关联容器:
map/set- 基于红黑树,有序multimap/multiset- 允许重复键
无序容器(C++11):
unordered_map/unordered_set- 基于哈希表
容器适配器:
stack- 栈queue- 队列priority_queue- 优先队列
面试官:选几个容器讲一下底层原理和应用场景。
面试者:
好的,我选vector、map和unordered_map:
1. vector - 动态数组
底层原理:
- 连续内存存储元素
- 三个关键指针:
begin_、end_、capacity_end_ - 扩容机制:当
size() == capacity()时,通常按2倍或1.5倍扩容 - 扩容过程:分配新内存 → 拷贝/移动元素 → 释放旧内存
代码示例:
std::vector<int> vec;
vec.reserve(100); // 预分配空间,避免多次扩容
for (int i = 0; i < 100; ++i) {
vec.push_back(i);
}
应用场景:
- 默认首选的序列容器
- 需要随机访问(O(1)索引)
- 尾部插入删除频繁
- 元素数量相对稳定或可预测
性能特点:
- 随机访问:O(1)
- 尾部插入/删除:O(1)(摊销)
- 中间插入/删除:O(n)
2. map - 有序关联容器
底层原理:
- 通常基于红黑树(自平衡二叉搜索树)
- 红黑树特性:
- 每个节点红或黑
- 根节点和叶子节点(NIL)为黑
- 红节点的子节点必须为黑
- 从任一节点到其叶子的所有路径包含相同数量的黑节点
内存布局:
[黑: 50]
/ \
[红: 30] [红: 70]
/ \ / \
[NIL] [黑:40] [黑:60] [黑:80]
应用场景:
- 需要按键排序遍历
- 需要范围查询(如查找30-70之间的键)
- 对插入/删除/查找的均衡性能要求
性能特点:
- 插入/删除/查找:O(log n)
- 有序遍历:O(n)
3. unordered_map - 哈希表
底层原理:
- 基于哈希表实现
- 关键组件:
- 哈希函数:将key映射到桶索引
- 桶数组:存储链表头指针(开链法解决冲突)
- 每个桶:链表存储哈希冲突的元素
内存布局:
桶数组: [0] -> [key1,value1] -> [key2,value2]
[1] -> [key3,value3]
[2] -> 空
...
[N] -> [keyN,valueN]
哈希冲突解决:
- 开链法:每个桶是一个链表
- C++11允许自定义哈希函数和相等比较器
应用场景:
- 需要极快的查找速度(平均O(1))
- 不需要有序遍历
- 键类型有良好的哈希函数
性能特点:
- 平均情况:插入/删除/查找 O(1)
- 最坏情况:O(n)(所有元素哈希到同一桶)
- 需要好的哈希函数避免冲突
选择建议:
- 默认用
vector - 需要关联查找且有序用
map - 需要最快查找且无序用
unordered_map
9、多线程编程时用到哪些同步方式
面试官:在多线程编程中,你用过哪些同步机制?
面试者:
根据不同的使用场景,我使用过以下同步方式:
1. 互斥锁 (Mutex)
使用场景:保护临界区,防止数据竞争
std::mutex mtx;
std::lock_guard<std::mutex> lock(mtx); // RAII管理
// 临界区代码
C++17改进:std::scoped_lock(可变参数锁,防死锁)
2. 条件变量 (Condition Variable)
使用场景:线程间等待/通知机制
std::condition_variable cv;
std::unique_lock<std::mutex> lock(mtx);
cv.wait(lock, []{ return data_ready; }); // 等待条件
cv.notify_one(); // 通知一个等待线程
3. 原子操作 (Atomic)
使用场景:简单计数器、标志位,无需锁
std::atomic<int> counter{0};
counter.fetch_add(1, std::memory_order_relaxed);
4. 读写锁 (Shared Mutex)
使用场景:读多写少的共享数据
std::shared_mutex rw_mutex;
// 读锁(共享)
{
std::shared_lock lock(rw_mutex);
// 多个线程可同时读
}
// 写锁(独占)
{
std::unique_lock lock(rw_mutex);
// 只有一个线程可写
}
5. 信号量 (Semaphore) - C++20
使用场景:控制并发访问数量
std::counting_semaphore<10> semaphore(3); // 允许3个并发
semaphore.acquire(); // 获取许可
// 访问受限资源
semaphore.release(); // 释放许可
6. 屏障 (Barrier) - C++20
使用场景:多个线程同步到同一执行点
std::barrier sync_point(4); // 等待4个线程
// 每个线程执行:
sync_point.arrive_and_wait(); // 到达并等待其他线程
7. Future/Promise
使用场景:异步任务结果传递
std::future<int> future = std::async([]{
return compute_result();
});
int result = future.get(); // 等待并获取结果
选择策略:
- 简单保护用
mutex+lock_guard - 等待条件用
condition_variable - 计数器用
atomic - 读多写少用
shared_mutex - 控制并发数用信号量
- 线程同步点用屏障
10、TCP和UDP的区别,在什么场景下使用
面试官:TCP和UDP有什么区别?各适用于什么场景?
面试者:
TCP和UDP是传输层的两种主要协议,区别如下:
核心区别对比表
| 特性 | TCP | UDP |
|---|---|---|
| 连接 | 面向连接,三次握手 | 无连接 |
| 可靠性 | 可靠,保证不丢包、不重复、按序 | 不可靠,可能丢包、乱序 |
| 传输方式 | 字节流,无消息边界 | 数据报,有消息边界 |
| 拥塞控制 | 有,慢启动、拥塞避免等 | 无 |
| 流量控制 | 滑动窗口机制 | 无 |
| 头部大小 | 20-60字节 | 8字节 |
| 复杂度 | 高,状态机复杂 | 低,简单 |
| 资源消耗 | 多(连接状态、缓冲区) | 少 |
TCP适用场景
-
需要可靠传输:
- 网页浏览(HTTP/HTTPS)
- 文件传输(FTP)
- 电子邮件(SMTP/POP3)
- 远程登录(SSH/Telnet)
-
需要按序到达:
- 数据库连接
- 金融交易系统
-
长连接通信:
- 即时通讯(如微信消息)
- 在线协作工具
UDP适用场景
-
实时性要求高:
- 音视频流(直播、视频会议)
- 在线游戏(MOBA、FPS)
- VoIP(语音通话)
-
简单查询/响应:
- DNS查询
- DHCP动态IP分配
- SNMP网络管理
-
广播/多播:
- 服务发现
- 网络时间同步(NTP)
-
容忍丢包:
- 实时传感器数据
- 日志收集
混合使用策略
实际系统中常混合使用:
- 游戏:TCP用于登录、聊天;UDP用于位置同步
- 流媒体:TCP用于控制信令;UDP用于音视频数据
- 自定义可靠UDP:在UDP上实现特定可靠性保证
选择建议
- 默认选TCP:除非有明确理由不选
- 实时性优先选UDP:能容忍少量丢包
- 简单查询选UDP:如DNS
- 考虑应用层协议:HTTP/3基于QUIC(UDP)
11、TCP服务端的创建过程
面试官:请描述一下TCP服务端的创建过程。
面试者:
创建TCP服务端包含以下步骤,我以Linux socket API为例:
完整代码流程
#include <sys/socket.h>
#include <netinet/in.h>
#include <unistd.h>
#include <iostream>
int main() {
// 1. 创建socket
int server_fd = socket(AF_INET, SOCK_STREAM, 0);
if (server_fd < 0) {
std::cerr << "Socket creation failed\n";
return -1;
}
// 设置SO_REUSEADDR避免TIME_WAIT状态问题
int opt = 1;
setsockopt(server_fd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt));
// 2. 绑定地址和端口
struct sockaddr_in address;
address.sin_family = AF_INET;
address.sin_addr.s_addr = INADDR_ANY; // 监听所有网卡
address.sin_port = htons(8080); // 端口8080,主机序转网络序
if (bind(server_fd, (struct sockaddr*)&address, sizeof(address)) < 0) {
std::cerr << "Bind failed\n";
close(server_fd);
return -1;
}
// 3. 监听连接
if (listen(server_fd, 10) < 0) { // 等待队列长度10
std::cerr << "Listen failed\n";
close(server_fd);
return -1;
}
std::cout << "Server listening on port 8080...\n";
// 4. 接受连接(循环处理多个客户端)
while (true) {
struct sockaddr_in client_addr;
socklen_t client_len = sizeof(client_addr);
// 阻塞等待客户端连接
int client_fd = accept(server_fd,
(struct sockaddr*)&client_addr,
&client_len);
if (client_fd < 0) {
std::cerr << "Accept failed\n";
continue;
}
// 获取客户端IP和端口
char client_ip[INET_ADDRSTRLEN];
inet_ntop(AF_INET, &client_addr.sin_addr,
client_ip, INET_ADDRSTRLEN);
std::cout << "Client connected: " << client_ip
<< ":" << ntohs(client_addr.sin_port) << "\n";
// 5. 处理客户端请求(这里可以创建新线程处理)
handle_client(client_fd);
// 6. 关闭客户端socket(在实际中,handle_client里关闭)
close(client_fd);
}
// 7. 关闭服务器socket(通常不会执行到这里)
close(server_fd);
return 0;
}
void handle_client(int client_fd) {
char buffer[1024] = {0};
// 读取客户端数据
ssize_t bytes_read = read(client_fd, buffer, sizeof(buffer));
if (bytes_read > 0) {
std::cout << "Received: " << buffer << "\n";
// 响应客户端
const char* response = "HTTP/1.1 200 OK\r\n\r\nHello from server!";
write(client_fd, response, strlen(response));
}
}
关键步骤详解
-
socket() - 创建套接字
AF_INET: IPv4地址族SOCK_STREAM: 流式套接字(TCP)- 返回文件描述符,用于后续操作
-
setsockopt() - 设置选项
SO_REUSEADDR: 允许重用本地地址- 解决服务器重启时"Address already in use"问题
-
bind() - 绑定地址
- 将socket与特定IP和端口绑定
INADDR_ANY: 监听所有网络接口htons(): 主机字节序转网络字节序
-
listen() - 开始监听
- 第二个参数:等待连接队列的最大长度
- 进入被动监听状态
-
accept() - 接受连接
- 阻塞调用:等待客户端连接
- 返回新的socket描述符用于与客户端通信
- 原始socket继续用于接受其他连接
-
read()/write() - 数据交换
- 使用accept返回的客户端socket进行通信
-
close() - 关闭连接
- 客户端连接处理完后关闭其socket
- 服务器退出时关闭监听socket
处理多客户端
实际服务器需要处理多个并发客户端:
方案1:多线程
void handle_client(int client_fd) {
// 处理客户端请求
close(client_fd);
}
while (true) {
int client_fd = accept(server_fd, ...);
std::thread client_thread(handle_client, client_fd);
client_thread.detach(); // 分离线程,自动清理
}
方案2:IO多路复用(更高效)
fd_set read_fds;
FD_SET(server_fd, &read_fds);
int max_fd = server_fd;
while (true) {
fd_set tmp_fds = read_fds;
select(max_fd + 1, &tmp_fds, NULL, NULL, NULL);
for (int fd = 0; fd <= max_fd; ++fd) {
if (FD_ISSET(fd, &tmp_fds)) {
if (fd == server_fd) {
// 新连接
int client_fd = accept(server_fd, ...);
FD_SET(client_fd, &read_fds);
max_fd = std::max(max_fd, client_fd);
} else {
// 客户端数据
handle_client_data(fd);
}
}
}
}
方案3:线程池
ThreadPool pool(4); // 4个工作线程
while (true) {
int client_fd = accept(server_fd, ...);
pool.enqueue([client_fd] {
handle_client(client_fd);
close(client_fd);
});
}
12、讲一下IO多路复用
面试官:什么是IO多路复用?有哪些实现方式?
面试者:
IO多路复用是一种同步IO模型,允许单个线程/进程同时监视多个文件描述符(如socket),当其中任何一个就绪(可读、可写或异常)时,程序就能进行相应的IO操作。
为什么需要IO多路复用?
传统阻塞IO的问题:
// 传统方式:每个客户端一个线程
void handle_client(int client_fd) {
// 阻塞在read()上
read(client_fd, buffer, sizeof(buffer));
// 处理请求
}
- 问题:1000个客户端需要1000个线程
- 线程切换开销大,内存占用高
IO多路复用解决方案:
- 1个线程监视所有socket
- 只有就绪的socket才进行IO操作
- 典型应用:Nginx、Redis
三种主要实现方式
1. select - 最古老
原理:
- 使用
fd_set位图表示文件描述符集合 - 每次调用需要传入读、写、异常三个集合
- 返回就绪的描述符数量
示例:
fd_set read_fds;
FD_ZERO(&read_fds);
FD_SET(socket1, &read_fds);
FD_SET(socket2, &read_fds);
struct timeval timeout = {5, 0}; // 5秒超时
int ready = select(max_fd + 1, &read_fds, NULL, NULL, &timeout);
if (FD_ISSET(socket1, &read_fds)) {
// socket1可读
}
缺点:
- 最大文件描述符限制(通常1024)
- 每次调用需要复制整个fd_set到内核
- 线性扫描所有描述符 O(n)
2. poll - 改进版
原理:
- 使用
pollfd结构体数组,没有数量限制 - 每个
pollfd包含fd、events、revents
示例:
struct pollfd fds[2];
fds[0].fd = socket1;
fds[0].events = POLLIN;
fds[1].fd = socket2;
fds[1].events = POLLIN;
int ready = poll(fds, 2, 5000); // 5秒超时
if (fds[0].revents & POLLIN) {
// socket1可读
}
相比select的优点:
- 无最大描述符限制
- 不需要每次重置整个集合
仍然存在的问题:
- 仍然需要遍历所有描述符
- 需要复制数组到内核
3. epoll - Linux高性能方案
原理(三个关键函数):
epoll_create()- 创建epoll实例epoll_ctl()- 注册/修改/删除关注的事件epoll_wait()- 等待事件发生
示例:
// 1. 创建epoll实例
int epoll_fd = epoll_create1(0);
// 2. 添加socket到epoll
struct epoll_event event;
event.events = EPOLLIN; // 监听可读事件
event.data.fd = socket1;
epoll_ctl(epoll_fd, EPOLL_CTL_ADD, socket1, &event);
// 3. 等待事件
struct epoll_event events[10];
int n = epoll_wait(epoll_fd, events, 10, -1); // 无限等待
for (int i = 0; i < n; i++) {
if (events[i].events & EPOLLIN) {
int ready_fd = events[i].data.fd;
// 处理ready_fd
}
}
epoll的两种工作模式:
-
水平触发(LT,默认):
- 只要文件描述符可读/可写,epoll_wait就会返回
- 类似select/poll的行为
- 编程更简单,但效率可能稍低
-
边缘触发(ET):
- 只有状态变化时才通知(如从不可读变为可读)
- 需要一次读完所有数据
- 效率更高,但编程更复杂
epoll核心优势:
- 事件驱动:只返回就绪的描述符,无需遍历
- 内核内存共享:
epoll_ctl注册后,内核维护事件表 - 支持边缘触发:减少重复通知
- 百万级并发支持:可处理大量连接
性能对比
| 特性 | select | poll | epoll |
|---|---|---|---|
| 最大连接数 | 1024 | 无限制 | 无限制 |
| IO效率 | O(n)线性扫描 | O(n)线性扫描 | O(1)事件驱动 |
| 内存拷贝 | 每次调用拷贝fd_set | 每次调用拷贝数组 | 注册时一次拷贝 |
| 触发模式 | 水平触发 | 水平触发 | 水平/边缘触发 |
其他平台实现
- Windows:
IOCP(完成端口),异步IO模型 - macOS/FreeBSD:
kqueue,类似epoll - 跨平台库:libevent, libuv, Boost.Asio
实际应用建议
- Linux高并发:首选epoll
- 跨平台:使用libevent/libuv
- C++项目:考虑Boost.Asio
- 简单场景:select/poll也足够
示例:epoll服务器框架
class EpollServer {
private:
int epoll_fd_;
std::unordered_map<int, ClientHandler> clients_;
public:
void run() {
epoll_fd_ = epoll_create1(0);
// 监听socket加入epoll
add_to_epoll(listen_fd_, EPOLLIN);
while (running_) {
struct epoll_event events[128];
int n = epoll_wait(epoll_fd_, events, 128, -1);
for (int i = 0; i < n; i++) {
int fd = events[i].data.fd;
uint32_t ev = events[i].events;
if (fd == listen_fd_) {
accept_new_client();
} else if (ev & EPOLLIN) {
handle_client_data(fd);
} else if (ev & EPOLLHUP) {
remove_client(fd);
}
}
}
}
};
13、生产环境程序异常/崩溃快速定位
面试官:假设你写的一个程序在生产环境运行中发生异常或崩溃,如何快速定位问题?
面试者:
这是一个系统工程问题,我会按照以下流程处理:
第一阶段:紧急响应与信息收集
1. 收集现场信息
# 1. 检查程序日志(最重要)
tail -f /var/log/myapp/error.log
grep -i "error\|exception\|fatal\|segmentation" myapp.log
# 2. 检查系统日志
dmesg | tail -20 # 内核消息
journalctl -xe -u myapp.service # systemd服务日志
cat /var/log/messages | tail -50 # 系统消息
# 3. 检查资源使用
top -p $(pidof myapp) # CPU/内存使用
df -h # 磁盘空间
netstat -anp | grep myapp # 网络连接
2. 获取核心转储(Core Dump)
# 部署前必须配置
ulimit -c unlimited # 允许生成core文件
echo "/tmp/core-%e-%p-%t" > /proc/sys/kernel/core_pattern
# 崩溃后检查
ls -lh /tmp/core-* # 查看core文件
file /tmp/core-myapp-1234-1623456789 # 确认是core文件
第二阶段:问题分析与调试
1. 使用GDB分析Core Dump
# 加载程序和core文件
gdb /path/to/myapp /tmp/core-myapp-1234-1623456789
# GDB常用命令
(gdb) bt # 查看完整调用栈(最重要!)
(gdb) bt full # 查看带局部变量的调用栈
(gdb) frame 2 # 切换到栈帧2
(gdb) info locals # 查看局部变量
(gdb) print variable_name # 打印变量值
(gdb) list # 查看源码
(gdb) info threads # 查看所有线程(多线程程序)
(gdb) thread apply all bt # 查看所有线程的调用栈
2. 保留调试符号
构建时保留符号:
# 发布版本也要带-g选项
g++ -O2 -g -DNDEBUG myapp.cpp -o myapp
# 可选:分离调试符号
objcopy --only-keep-debug myapp myapp.debug
strip --strip-debug --strip-unneeded myapp
调试时加载符号:
gdb -e myapp -c corefile -s myapp.debug
第三阶段:常见问题排查模式
1. 段错误(Segmentation Fault)
可能原因:
- 空指针解引用
- 内存越界访问
- 使用已释放内存
- 栈溢出
排查命令:
# 使用AddressSanitizer编译
g++ -fsanitize=address -g myapp.cpp -o myapp
./myapp # 会检测内存错误
# 使用Valgrind
valgrind --tool=memcheck --leak-check=full ./myapp
2. 死锁
排查方法:
# 查看线程状态
pstack $(pidof myapp)
# 使用gdb检查
(gdb) info threads
(gdb) thread apply all bt
# 使用专门的死锁检测工具
valgrind --tool=helgrind ./myapp
3. 内存泄漏
检测工具:
# Valgrind
valgrind --leak-check=full --show-leak-kinds=all ./myapp
# mtrace(glibc内置)
export MALLOC_TRACE=/tmp/mtrace.log
./myapp
mtrace ./myapp /tmp/mtrace.log
第四阶段:实时监控与预防
1. 监控系统搭建
// 代码中添加监控点
class Monitoring {
public:
static void log_memory_usage() {
std::ifstream statm("/proc/self/statm");
size_t vm_size, resident;
statm >> vm_size >> resident;
LOG_INFO("Memory: VmSize={}KB, RSS={}KB",
vm_size * 4, resident * 4);
}
static void signal_handler(int sig) {
// 记录崩溃时的信息
LOG_CRITICAL("Signal {} received", sig);
print_stack_trace(); // 打印堆栈
std::quick_exit(1); // 快速退出
}
};
// 注册信号处理器
std::signal(SIGSEGV, Monitoring::signal_handler);
std::signal(SIGABRT, Monitoring::signal_handler);
2. 健康检查接口
// 实现健康检查端点
void handle_health_check(Request& req, Response& resp) {
resp.json({
{"status", "healthy"},
{"memory_usage", get_memory_usage()},
{"active_connections", get_connection_count()},
{"queue_size", get_task_queue_size()}
});
}
第五阶段:复现与修复
1. 生产环境复现策略
# 1. 流量复制
tcpcopy -x 80-127.0.0.1:8080 -s 192.168.1.100 -c 192.168.1.x
# 2. 压力测试复现
ab -n 10000 -c 100 http://localhost:8080/api
# 3. 使用相同配置的测试环境
2. 修复流程
- 紧急修复:针对特定问题快速修复
- 根本原因分析:找到深层原因
- 测试验证:在测试环境验证修复
- 安全发布:灰度发布,监控指标
预防措施
1. 代码层面
// 防御性编程
class SafePointer {
public:
template<typename T>
static T* check_null(T* ptr, const char* msg) {
if (!ptr) {
LOG_ERROR("Null pointer: {}", msg);
throw std::runtime_error(msg);
}
return ptr;
}
};
// 使用前检查
auto* obj = SafePointer::check_null(raw_ptr, "User object");
2. 部署层面
# docker-compose.yml 健康检查
healthcheck:
test: ["CMD", "curl", "-f", "http://localhost:8080/health"]
interval: 30s
timeout: 5s
retries: 3
start_period: 10s
3. 监控告警
# 监控脚本示例
#!/bin/bash
while true; do
if ! curl -s http://localhost:8080/health > /dev/null; then
# 发送告警
send_alert "Service unhealthy"
# 自动重启
systemctl restart myapp
fi
sleep 30
done
工具总结
| 工具 | 用途 | 使用时机 |
|---|---|---|
| GDB | 分析core dump,查看堆栈 | 程序崩溃后 |
| Valgrind | 内存泄漏、越界检测 | 测试环境 |
| AddressSanitizer | 内存错误检测 | 测试/开发环境 |
| strace | 系统调用追踪 | 性能问题、阻塞分析 |
| perf | 性能分析 | CPU瓶颈分析 |
| tcpdump | 网络包分析 | 网络问题 |
| Prometheus+Grafana | 监控可视化 | 实时监控 |
14、在线游戏房间设计
面试官:设计一个在线游戏房间系统,需要记录玩家状态、属性并同步给其他玩家,你会如何设计?
面试者:
这是一个典型的实时多人在线游戏房间设计问题。我会从架构、通信、数据同步等方面进行设计:
1. 整体架构设计
分层架构:
┌─────────────────────────────────────┐
│ 客户端 (Client) │
│ ┌─────────┐ ┌─────────┐ │
│ │ 渲染 │ │ 输入处理 │ │
│ └─────────┘ └─────────┘ │
└─────────────────────────────────────┘
│ ▲
TCP/UDP │ │ 状态同步
▼ │
┌─────────────────────────────────────┐
│ 游戏服务器集群 │
│ ┌─────────┐ ┌─────────────┐ │
│ │匹配服务 │ ──── │ 游戏房间服务 │ │
│ └─────────┘ └─────────────┘ │
│ │ │ │
│ ┌─────────┐ ┌─────────────┐ │
│ │玩家管理 │ │ 状态同步引擎 │ │
│ └─────────┘ └─────────────┘ │
└─────────────────────────────────────┘
│ │
▼ ▼
┌─────────────────────────────────────┐
│ 数据存储层 │
│ ┌─────────┐ ┌─────────┐ │
│ │ Redis │ │ MySQL │ │
│ └─────────┘ └─────────┘ │
└─────────────────────────────────────┘
2. 核心组件设计
房间管理器 (RoomManager)
class RoomManager {
private:
std::unordered_map<int, std::shared_ptr<GameRoom>> rooms_;
std::atomic<int> next_room_id_{1000};
std::shared_mutex rooms_mutex_;
public:
// 创建房间
std::shared_ptr<GameRoom> create_room(const RoomConfig& config) {
auto room = std::make_shared<GameRoom>(next_room_id_++, config);
std::unique_lock lock(rooms_mutex_);
rooms_[room->id()] = room;
return room;
}
// 匹配玩家
std::shared_ptr<GameRoom> match_players(
const std::vector<PlayerMatchInfo>& players) {
// 1. 查找合适的房间
// 2. 或创建新房间
// 3. 加入玩家
}
};
游戏房间 (GameRoom)
class GameRoom : public std::enable_shared_from_this<GameRoom> {
private:
const int room_id_;
RoomState state_ = RoomState::WAITING;
RoomConfig config_;
// 玩家管理
std::unordered_map<int, std::shared_ptr<Player>> players_;
std::shared_mutex players_mutex_;
// 游戏状态
GameState game_state_;
std::chrono::steady_clock::time_point game_start_time_;
// 网络通信
std::unique_ptr<NetworkManager> network_;
public:
// 玩家加入
bool add_player(std::shared_ptr<Player> player) {
std::unique_lock lock(players_mutex_);
if (players_.size() >= config_.max_players) {
return false;
}
players_[player->id()] = player;
// 通知其他玩家
broadcast_player_joined(player);
// 如果房间满员,开始游戏
if (players_.size() == config_.max_players) {
start_game();
}
return true;
}
// 状态同步
void sync_game_state() {
GameStateSnapshot snapshot;
snapshot.timestamp = get_current_time();
// 收集所有玩家状态
std::shared_lock lock(players_mutex_);
for (const auto& [player_id, player] : players_) {
snapshot.player_states[player_id] = player->get_state();
}
// 广播给所有玩家
broadcast_to_all(MessageType::STATE_SYNC, snapshot);
}
};
玩家对象 (Player)
class Player {
private:
const int player_id_;
std::string username_;
PlayerConnectionPtr connection_; // 网络连接
// 游戏状态
PlayerState state_;
Vector3 position_;
Vector3 velocity_;
int health_ = 100;
std::map<std::string, Item> inventory_;
// 序列化
template<typename Archive>
void serialize(Archive& ar) {
ar(player_id_, position_, velocity_, health_);
}
public:
// 更新位置
void update_position(const Vector3& new_pos, float delta_time) {
position_ = new_pos;
// 验证移动合法性(防作弊)
if (!validate_movement(new_pos, delta_time)) {
// 位置回滚或踢出玩家
connection_->disconnect(DisconnectReason::CHEATING);
return;
}
// 发送位置更新到服务器
send_to_server(PlayerMoveMessage{player_id_, position_});
}
// 获取状态快照
PlayerStateSnapshot get_state_snapshot() const {
return PlayerStateSnapshot{
.player_id = player_id_,
.position = position_,
.velocity = velocity_,
.health = health_,
.timestamp = get_current_time()
};
}
};
3. 网络通信设计
协议选择
// 混合协议策略
class NetworkManager {
private:
// TCP: 可靠传输(聊天、命令)
TcpServer tcp_server_;
// UDP: 实时同步(位置、动作)
UdpServer udp_server_;
// 可靠UDP: 重要状态同步
ReliableUdpChannel reliable_udp_;
public:
void setup_protocols() {
// TCP端口: 用于登录、聊天、物品交易
tcp_server_.listen(9000);
// UDP端口: 用于实时位置同步
udp_server_.listen(9001);
// WebSocket: 用于Web客户端
websocket_server_.listen(9002);
}
};
消息格式(使用Protobuf)
// game_messages.proto
syntax = "proto3";
message PlayerState {
int32 player_id = 1;
Vector3 position = 2;
Vector3 velocity = 3;
int32 health = 4;
int64 timestamp = 5;
}
message GameStateSnapshot {
int64 frame_number = 1;
int64 timestamp = 2;
map<int32, PlayerState> player_states = 3;
}
message PlayerInput {
int32 player_id = 1;
int64 input_sequence = 2;
repeated InputAction actions = 3;
}
4. 状态同步策略
状态同步 vs 帧同步
状态同步(State Synchronization):
// 服务器权威,定期广播状态
class StateSynchronizer {
public:
void broadcast_game_state() {
// 收集状态
GameState state = collect_current_state();
// 差异同步(只发送变化部分)
auto delta = calculate_delta(last_state_, state);
// 压缩和序列化
auto compressed = compress_state(delta);
// 发送给所有客户端
for (auto& player : players_) {
player->send_state_update(compressed);
}
last_state_ = std::move(state);
}
};
帧同步(Lockstep Synchronization):
// 所有客户端运行相同逻辑
class LockstepSynchronizer {
private:
std::queue<PlayerInput> input_queue_;
int current_frame_ = 0;
public:
void advance_frame() {
// 等待所有玩家的当前帧输入
if (!has_all_inputs_for_frame(current_frame_)) {
return; // 等待
}
// 应用所有输入
auto inputs = get_inputs_for_frame(current_frame_);
apply_inputs(inputs);
// 广播确定性结果
broadcast_frame_result(current_frame_, game_state_);
current_frame_++;
}
};
选择建议:
- MOBA/RTS:帧同步(需要完全一致的计算)
- FPS/动作游戏:状态同步(服务器权威,防作弊)
- 休闲游戏:状态同步(实现简单)
5. 数据存储设计
Redis缓存(热数据)
class PlayerCache {
private:
redis::client redis_;
public:
void cache_player_state(int player_id, const PlayerState& state) {
std::string key = fmt::format("player:{}:state", player_id);
std::string data = serialize_to_json(state);
// 设置过期时间
redis_.setex(key, 300, data); // 5分钟过期
}
std::optional<PlayerState> get_cached_state(int player_id) {
auto data = redis_.get(fmt::format("player:{}:state", player_id));
if (data) {
return deserialize_from_json<PlayerState>(*data);
}
return std::nullopt;
}
};
MySQL持久化(冷数据)
-- 玩家表
CREATE TABLE players (
id INT PRIMARY KEY AUTO_INCREMENT,
username VARCHAR(50) UNIQUE NOT NULL,
level INT DEFAULT 1,
experience BIGINT DEFAULT 0,
last_login TIMESTAMP,
created_at TIMESTAMP DEFAULT CURRENT_TIMESTAMP
);
-- 游戏记录表
CREATE TABLE game_records (
id BIGINT PRIMARY KEY AUTO_INCREMENT,
room_id INT NOT NULL,
player_id INT NOT NULL,
game_result ENUM('win', 'lose', 'draw'),
score INT,
duration_seconds INT,
ended_at TIMESTAMP DEFAULT CURRENT_TIMESTAMP,
INDEX idx_player_result (player_id, game_result)
);
6. 容错与扩展
房间迁移
class RoomMigration {
public:
void migrate_room(int room_id, int from_server, int to_server) {
// 1. 暂停房间状态更新
pause_room(room_id);
// 2. 序列化房间状态
auto snapshot = create_room_snapshot(room_id);
// 3. 传输到新服务器
transfer_snapshot(to_server, snapshot);
// 4. 新服务器恢复状态
recover_room(to_server, snapshot);
// 5. 通知客户端重连
notify_clients_redirect(room_id, to_server);
}
};
水平扩展
客户端 ──→ 负载均衡器 ──┬──→ 游戏服务器1 (房间1-1000)
├──→ 游戏服务器2 (房间1001-2000)
└──→ 游戏服务器3 (房间2001-3000)
7. 完整流程示例
玩家加入房间流程:
1. 客户端请求加入房间
→ 匹配服务
2. 匹配服务查找/创建房间
→ 房间管理器
3. 分配房间服务器
→ 负载均衡器
4. 建立网络连接
→ TCP握手 + UDP打洞
5. 加载玩家数据
→ Redis缓存 + MySQL持久层
6. 同步初始状态
→ 广播给房间内所有玩家
7. 开始游戏循环
→ 状态同步/帧同步引擎
8. 性能优化
class Optimization {
public:
// 1. 空间分区优化(减少广播范围)
void spatial_partitioning() {
// 将游戏世界划分为网格
// 只同步同一网格和相邻网格的玩家
}
// 2. 优先级同步
void priority_based_sync() {
// 根据距离设置同步频率
// 近距离:高频同步(10Hz)
// 远距离:低频同步(2Hz)
}
// 3. 预测与插值
void client_side_prediction() {
// 客户端预测移动,服务器校正
// 插值平滑其他玩家的移动
}
// 4. 数据压缩
void compress_data() {
// 使用Snappy/LZ4压缩状态数据
// 使用定点数代替浮点数
// 使用差值编码
}
};
9. 安全考虑
class Security {
public:
// 1. 输入验证
bool validate_player_input(const PlayerInput& input) {
// 检查移动速度是否合理
// 检查冷却时间
// 检查技能使用合法性
}
// 2. 防作弊
void anti_cheat() {
// 服务器权威验证
// 定期客户端完整性检查
// 行为模式分析
}
// 3. DDOS防护
void ddos_protection() {
// 连接频率限制
// 验证码机制
// IP黑白名单
}
};
总结设计要点
- 架构清晰:分层设计,职责分离
- 通信高效:混合协议,按需选择
- 同步合理:根据游戏类型选择同步策略
- 数据可靠:缓存+持久化,保证数据不丢失
- 扩展性强:支持水平扩展,房间可迁移
- 安全可靠:服务器权威,防作弊机制
- 性能优化:预测、插值、压缩、分区
- 容错处理:断线重连,状态恢复
15、Protobuf使用经验
面试官:Protobuf这个组件有使用过吗?
面试者:
是的,我在多个项目中使用过Google的Protocol Buffers(Protobuf)。
1. 基本使用流程
定义消息格式 (.proto文件)
// player.proto
syntax = "proto3";
package game;
message Vector3 {
float x = 1;
float y = 2;
float z = 3;
}
message PlayerState {
int32 player_id = 1;
string username = 2;
Vector3 position = 3;
int32 health = 4;
repeated string equipment = 5; // 重复字段
map<string, int32> attributes = 6; // map类型
enum Status {
ONLINE = 0;
OFFLINE = 1;
AFK = 2;
}
Status status = 7;
oneof weapon { // 联合字段
string sword = 8;
string bow = 9;
string staff = 10;
}
}
message GameRoom {
int32 room_id = 1;
repeated PlayerState players = 2;
int64 create_time = 3;
}
编译生成代码
# 生成C++代码
protoc --cpp_out=. player.proto
# 生成其他语言
protoc --java_out=. player.proto
protoc --python_out=. player.proto
C++中使用
#include "player.pb.h"
// 创建消息
game::PlayerState player;
player.set_player_id(1001);
player.set_username("Player1");
player.set_health(100);
auto* pos = player.mutable_position();
pos->set_x(10.5f);
pos->set_y(0.0f);
pos->set_z(20.3f);
// 添加重复字段
player.add_equipment("sword");
player.add_equipment("shield");
// 设置map字段
(*player.mutable_attributes())["strength"] = 80;
(*player.mutable_attributes())["agility"] = 65;
// 序列化
std::string serialized_data;
player.SerializeToString(&serialized_data);
// 发送到网络或存储
send_over_network(serialized_data);
// 反序列化
game::PlayerState received_player;
if (received_player.ParseFromString(received_data)) {
std::cout << "Player: " << received_player.username()
<< ", Health: " << received_player.health() << "\n";
}
2. Protobuf的优势
性能优势
// 与JSON对比
void benchmark() {
// JSON序列化
json j = {
{"player_id", 1001},
{"username", "Player1"},
{"health", 100},
{"position", {{"x", 10.5}, {"y", 0.0}, {"z", 20.3}}}
};
std::string json_str = j.dump(); // 约120字节
// Protobuf序列化
game::PlayerState player;
// ... 设置字段
std::string pb_str;
player.SerializeToString(&pb_str); // 约40-60字节
// 结果:Protobuf体积小50-70%,序列化速度快5-10倍
}
版本兼容性
// 旧版本
message PlayerState {
int32 id = 1;
string name = 2;
int32 level = 3;
}
// 新版本(向后兼容)
message PlayerState {
int32 id = 1;
string name = 2;
int32 level = 3;
// 新增字段
string clan = 4; // 新增字段,旧代码忽略
optional int32 exp = 5; // 可选字段
repeated string titles = 6; // 重复字段,旧代码忽略
}
规则:
- 字段编号一旦使用,永远不要更改
- 不要删除字段,标记为
reserved - 新增字段使用新的字段编号
3. 高级特性使用
Any类型(任意消息)
import "google/protobuf/any.proto";
message GameEvent {
string event_type = 1;
google.protobuf.Any event_data = 2;
}
// 使用
game::PlayerJoinEvent join_event;
join_event.set_player_id(1001);
join_event.set_join_time(get_current_time());
GameEvent event;
event.set_event_type("player_join");
event.mutable_event_data()->PackFrom(join_event);
服务定义(gRPC使用)
service GameService {
// 简单RPC
rpc JoinRoom (JoinRequest) returns (JoinResponse);
// 服务端流式RPC
rpc StreamGameState (StreamRequest) returns (stream GameState);
// 客户端流式RPC
rpc ReportPlayerActions (stream PlayerAction) returns (ActionResponse);
// 双向流式RPC
rpc Chat (stream ChatMessage) returns (stream ChatMessage);
}
4. 实际项目经验
网络游戏消息系统
class MessageDispatcher {
private:
google::protobuf::Arena arena_; // 内存池,提高性能
public:
template<typename T>
std::shared_ptr<T> parse_message(const std::string& data) {
// 使用Arena分配,避免频繁内存分配
auto* msg = google::protobuf::Arena::CreateMessage<T>(&arena_);
if (msg->ParseFromString(data)) {
return std::shared_ptr<T>(msg, [](T*){ /* arena自动管理 */ });
}
return nullptr;
}
void dispatch(const std::string& data) {
// 解析消息头,获取消息类型
MessageHeader header;
if (!header.ParseFromString(data.substr(0, 4))) {
return;
}
switch (header.type()) {
case MSG_PLAYER_JOIN:
handle_player_join(parse_message<PlayerJoin>(data.substr(4)));
break;
case MSG_PLAYER_MOVE:
handle_player_move(parse_message<PlayerMove>(data.substr(4)));
break;
// ... 其他消息类型
}
}
};
配置管理
// game_config.proto
message GameConfig {
message ServerConfig {
string host = 1;
int32 port = 2;
int32 max_connections = 3;
}
message GameplayConfig {
float player_speed = 1;
int32 max_players_per_room = 2;
int32 game_duration_seconds = 3;
}
ServerConfig server = 1;
GameplayConfig gameplay = 2;
map<string, string> features = 3;
}
// 加载配置
game::GameConfig config;
std::ifstream file("game_config.pb", std::ios::binary);
if (file && config.ParseFromIstream(&file)) {
// 使用配置
server_port_ = config.server().port();
max_players_ = config.gameplay().max_players_per_room();
}
5. 最佳实践
性能优化
// 1. 重用消息对象
thread_local game::PlayerState cached_message;
// 2. 使用Arena分配(减少内存碎片)
google::protobuf::Arena arena;
auto* msg = google::protobuf::Arena::CreateMessage<PlayerState>(&arena);
// 3. 预分配重复字段
void prepare_player_message(game::PlayerState& msg) {
// 预分配空间,避免动态扩容
msg.mutable_equipment()->Reserve(10);
msg.mutable_attributes()->Reserve(20);
}
// 4. 使用CodedStream处理大消息
google::protobuf::io::CodedInputStream stream(
reinterpret_cast<const uint8_t*>(data), data.size());
stream.SetTotalBytesLimit(100 * 1024 * 1024); // 限制100MB
错误处理
class SafeProtobuf {
public:
template<typename T>
static std::optional<T> parse_safe(const std::string& data) {
T message;
// 安全检查
if (data.size() > MAX_MESSAGE_SIZE) {
LOG_ERROR("Message too large: {} bytes", data.size());
return std::nullopt;
}
// 解析
if (!message.ParseFromString(data)) {
LOG_ERROR("Failed to parse protobuf message");
return std::nullopt;
}
// 验证必需字段
if (!message.has_player_id()) {
LOG_ERROR("Missing required field: player_id");
return std::nullopt;
}
return message;
}
};
6. 与其他方案对比
| 特性 | Protobuf | JSON | XML | FlatBuffers |
|---|---|---|---|---|
| 序列化速度 | 快 | 慢 | 很慢 | 最快(零拷贝) |
| 反序列化速度 | 快 | 慢 | 很慢 | 最快(零拷贝) |
| 数据大小 | 小 | 大 | 很大 | 小 |
| 可读性 | 差(二进制) | 好 | 好 | 差(二进制) |
| 模式演进 | 好 | 差 | 一般 | 好 |
| 语言支持 | 广泛 | 广泛 | 广泛 | 较少 |
7. 适用场景
- 网络通信:游戏消息、RPC调用(gRPC)
- 配置文件:结构化配置存储
- 数据持久化:保存游戏存档、排行榜
- 进程间通信:不同语言服务间的数据交换
- 机器学习:模型配置、特征存储
总结经验
我在项目中主要将Protobuf用于:
- 游戏服务器间的通信协议
- 客户端-服务器消息格式
- 配置文件的二进制存储
- 数据库缓存对象的序列化
优势明显:高性能、跨语言、向前兼容。但需要注意二进制格式的调试难度,需要配合好的日志和调试工具。
16、数据库使用经验
面试官:你在项目中使用过哪些数据库?
面试者:
我使用过以下几种数据库:
- MySQL - 关系型数据库,最常用
- PostgreSQL - 功能更强大的关系型数据库
- SQLite - 嵌入式数据库,轻量级
- Redis - 内存键值存储,用作缓存
- MongoDB - 文档数据库,用于灵活模式场景
面试官:MySQL的存储引擎用过哪几种?
面试者:
我主要用过两种:
-
InnoDB - 生产环境默认选择
- 支持事务(ACID)
- 行级锁
- 支持外键
- 崩溃恢复能力
-
MyISAM - 特定场景使用
- 读性能高
- 全文索引
- 不支持事务
- 表级锁
也了解过MEMORY引擎(内存表)和ARCHIVE引擎(归档存储),但实际项目中使用较少。
面试官:详细讲讲InnoDB的特点。
面试者:
InnoDB是MySQL的默认存储引擎,具有以下核心特点:
1. 事务支持
-- ACID特性保证
START TRANSACTION;
UPDATE accounts SET balance = balance - 100 WHERE user_id = 1;
UPDATE accounts SET balance = balance + 100 WHERE user_id = 2;
COMMIT; -- 或 ROLLBACK
2. 行级锁与MVCC
行级锁:
- 只锁定需要修改的行,提高并发
- 支持共享锁(S锁)和排他锁(X锁)
MVCC(多版本并发控制):
时间轴: t1 ──── t2 ──── t3 ──── t4
事务A: 读取id=1的行(创建ReadView)
事务B: 在t3更新了id=1的行(生成新版本)
事务A: 在t4再次读取,仍然看到t1时的版本
3. 聚簇索引
数据结构:
B+树结构:
根节点 -> 中间节点 -> 叶子节点(存储行数据)
特点:
- 主键索引的叶子节点包含完整行数据
- 表数据本身就是索引的一部分
- 主键查询速度极快
4. 外键约束
CREATE TABLE orders (
order_id INT PRIMARY KEY,
user_id INT,
FOREIGN KEY (user_id)
REFERENCES users(user_id)
ON DELETE CASCADE
ON UPDATE CASCADE
);
5. 崩溃恢复
双写缓冲(Doublewrite Buffer):
写数据流程:
1. 数据页写入doublewrite buffer
2. 将buffer写入系统表空间(连续位置)
3. 写入实际数据文件位置
4. 如果步骤3崩溃,可以从步骤2恢复
Redo Log(重做日志):
-- 保证持久性
-- Write-Ahead Logging (WAL) 原则
-- 先写日志,再写数据
面试官:其他存储引擎的索引底层用什么结构?
面试者:
-
MyISAM:使用B+树,但索引和数据分离
.MYD文件存储数据.MYI文件存储索引- 叶子节点存储数据文件的物理地址
-
MEMORY:默认哈希索引,也可指定为B+树
CREATE TABLE t (id INT, INDEX USING HASH (id)) ENGINE=MEMORY; CREATE TABLE t (id INT, INDEX USING BTREE (id)) ENGINE=MEMORY; -
NDB Cluster:使用T树(平衡二叉树变种)
面试官:数据库事务有哪几种隔离级别?
面试者:
SQL标准定义了四种隔离级别:
1. 读未提交(READ UNCOMMITTED)
SET SESSION TRANSACTION ISOLATION LEVEL READ UNCOMMITTED;
- 可能读到其他事务未提交的数据(脏读)
- 性能最好,但数据一致性最差
- 实际很少使用
2. 读已提交(READ COMMITTED)
SET SESSION TRANSACTION ISOLATION LEVEL READ COMMITTED;
- 只能读到已提交的数据
- 解决脏读,但可能产生不可重复读
- Oracle默认级别
3. 可重复读(REPEATABLE READ)
SET SESSION TRANSACTION ISOLATION LEVEL REPEATABLE READ;
- MySQL InnoDB默认级别
- 保证同一事务内多次读取同一数据结果一致
- 解决不可重复读,但可能产生幻读
- InnoDB通过MVCC和间隙锁解决大部分幻读
4. 串行化(SERIALIZABLE)
SET SESSION TRANSACTION ISOLATION LEVEL SERIALIZABLE;
- 最高隔离级别
- 完全串行执行事务
- 解决所有并发问题,但性能最差
问题演示:
-- 脏读:事务A读到事务B未提交的数据
-- 不可重复读:事务A两次读取同一数据,中间被事务B修改
-- 幻读:事务A两次范围查询,中间被事务B插入新行
面试官:索引平常用过哪几种?
面试者:
我常用的索引类型:
1. 主键索引(PRIMARY KEY)
CREATE TABLE users (
id INT PRIMARY KEY, -- 主键索引
name VARCHAR(50)
);
- 唯一且非空
- InnoDB中就是聚簇索引
- 每张表只能有一个
2. 唯一索引(UNIQUE)
CREATE TABLE users (
email VARCHAR(100),
UNIQUE INDEX idx_email (email)
);
- 保证列值唯一
- 允许NULL值(但只能有一个NULL)
3. 普通索引(INDEX)
CREATE INDEX idx_name ON users(name);
- 最基本的索引类型
- 加快查询速度
4. 联合索引(复合索引)
CREATE INDEX idx_name_age ON users(name, age);
- 在多个列上建立索引
- 遵循最左前缀原则
- 示例查询:
-- 使用索引 SELECT * FROM users WHERE name = 'Alice'; SELECT * FROM users WHERE name = 'Alice' AND age = 25; -- 不使用索引(不满足最左前缀) SELECT * FROM users WHERE age = 25;
5. 全文索引(FULLTEXT)
CREATE TABLE articles (
content TEXT,
FULLTEXT INDEX idx_content (content)
) ENGINE=InnoDB;
SELECT * FROM articles
WHERE MATCH(content) AGAINST('数据库 优化');
- 用于全文搜索
- InnoDB从5.6开始支持
6. 空间索引(SPATIAL)
CREATE TABLE locations (
position POINT,
SPATIAL INDEX idx_position (position)
);
- 用于地理空间数据
- 必须使用MyISAM引擎
面试官:数据表建索引时,如何平衡索引的多少?
面试者:
这是一个权衡艺术,我的原则是:
平衡策略
-
查询需求驱动:
-- 分析慢查询日志 SHOW ENGINE INNODB STATUS\G -- 查看未使用索引的查询 SELECT * FROM sys.schema_unused_indexes; -
写代价考虑:
- 每个索引都需要维护
- 增加插入/更新/删除的开销
- 经验值:写操作越频繁,索引应越少
-
空间成本:
-- 查看索引大小 SELECT table_name, index_name, ROUND(stat_value * @@innodb_page_size / 1024 / 1024, 2) AS size_mb FROM mysql.innodb_index_stats WHERE stat_name = 'size';
建索引优先级
// 伪代码:索引建设优先级
enum IndexPriority {
HIGH_PRIORITY = 1, // WHERE条件中的列
MEDIUM_PRIORITY = 2, // JOIN连接条件的列
LOW_PRIORITY = 3, // ORDER BY/GROUP BY的列
OPTIONAL = 4 // 覆盖索引考虑
};
// 评估函数
bool should_create_index(const QueryPattern& pattern) {
// 1. 查询频率高
if (pattern.frequency < THRESHOLD) return false;
// 2. 选择性好(区分度高)
if (pattern.selectivity < 0.1) return false; // 如性别列
// 3. 更新频率低
if (pattern.update_frequency > UPDATE_THRESHOLD) return false;
return true;
}
实际案例
-- 用户表:读多写少,可多建索引
CREATE TABLE users (
id INT PRIMARY KEY,
email VARCHAR(100) UNIQUE, -- 登录用
phone VARCHAR(20) UNIQUE, -- 手机验证
username VARCHAR(50) INDEX, -- 搜索用
created_at DATETIME INDEX, -- 按时间查询
status TINYINT INDEX, -- 状态过滤
INDEX idx_email_status (email, status) -- 联合索引
);
-- 日志表:写多读少,少建索引
CREATE TABLE access_logs (
id BIGINT PRIMARY KEY,
user_id INT, -- 只建必要索引
access_time DATETIME,
INDEX idx_user_time (user_id, access_time) -- 仅联合索引
);
面试官:索引是不是建的越多越好?
面试者:
绝对不是。索引是一把双刃剑:
索引过多的弊端
-
写性能下降:
-- 每次INSERT需要更新所有索引 INSERT INTO users (id, email, phone, ...) VALUES (...); -- 需要更新:主键索引、email索引、phone索引、username索引... -
额外存储空间:
-- 一个1GB的表,索引可能占用500MB-1GB -
优化器负担:
查询:SELECT * FROM users WHERE a = 1 AND b = 2; 索引:idx_a, idx_b, idx_a_b, idx_b_a 优化器需要评估4种可能的执行计划 -
索引维护成本:
- 定期ANALYZE TABLE更新统计信息
- OPTIMIZE TABLE重建索引
- 备份恢复时间增加
应该避免的索引
-
重复索引:
-- 冗余索引 INDEX idx_a (a), INDEX idx_a_b (a, b), -- idx_a是idx_a_b的前缀,可删除 INDEX idx_a_b_c (a, b, c) -
低选择性索引:
-- 性别列,只有2-3个值 CREATE INDEX idx_gender ON users(gender); -- 基本无效 -
频繁更新的列:
-- 每次更新都需要维护索引 UPDATE users SET last_active = NOW() WHERE id = 1;
最佳实践
-- 1. 使用联合索引代替多个单列索引
CREATE INDEX idx_a_b_c ON table1(a, b, c);
-- 而不是
CREATE INDEX idx_a ON table1(a);
CREATE INDEX idx_b ON table1(b);
CREATE INDEX idx_c ON table1(c);
-- 2. 考虑覆盖索引
-- 查询:SELECT a, b FROM table1 WHERE a = 1;
-- 索引:CREATE INDEX idx_a_b ON table1(a, b); -- 覆盖索引
-- 3. 定期清理无用索引
SELECT * FROM sys.schema_unused_indexes;
面试官:平常写SQL时怎么判断SQL语句的性能效率?
面试者:
我使用多种工具和方法来评估SQL性能:
1. EXPLAIN分析
-- 基本分析
EXPLAIN SELECT * FROM users WHERE email = 'test@example.com';
-- 详细分析(MySQL 5.6+)
EXPLAIN FORMAT=JSON SELECT ...;
-- 实际执行计划
EXPLAIN ANALYZE SELECT ...; -- MySQL 8.0.18+
关键字段解读:
-
type:访问类型(性能从好到坏)
system > const > eq_ref > ref > range > index > ALL -- 目标:至少达到range级别 -
key:实际使用的索引
-
rows:预估扫描行数(越少越好)
-
Extra:额外信息
Using index:覆盖索引,性能好 Using filesort:需要额外排序,可能需优化 Using temporary:使用临时表,可能需优化
2. 性能测试
-- 1. 开启性能分析
SET profiling = 1;
SELECT ...; -- 执行查询
SHOW PROFILES;
SHOW PROFILE FOR QUERY 1;
-- 2. 查看执行时间
SELECT BENCHMARK(1000000, MD5('test'));
-- 3. 慢查询日志分析
SET GLOBAL slow_query_log = 1;
SET GLOBAL long_query_time = 1; -- 超过1秒的查询
3. 监控工具
-- 实时监控
SHOW PROCESSLIST; -- 查看当前连接
-- InnoDB状态
SHOW ENGINE INNODB STATUS\G
-- 表统计信息
SHOW TABLE STATUS LIKE 'users';
4. 可视化工具
- MySQL Workbench:可视化EXPLAIN
- Percona Toolkit:
pt-query-digest分析慢查询 - phpMyAdmin:简单分析工具
5. 我的检查清单
-- 查询性能检查清单
1. 是否使用索引? ✅ EXPLAIN查看type和key
2. 扫描行数是否合理? ✅ rows字段
3. 是否有文件排序? ✅ Extra: Using filesort
4. 是否使用临时表? ✅ Extra: Using temporary
5. 索引选择性如何? ✅ 区分度 > 10%
6. 是否覆盖索引? ✅ Extra: Using index
7. 连接顺序是否优化? ✅ 小表驱动大表
面试官:建了索引之后,使用索引字段查询速度一定会快吗?
面试者:
不一定。索引在某些情况下会失效或不使用:
1. 索引失效的场景
违反最左前缀原则
-- 索引:CREATE INDEX idx_a_b_c ON table1(a, b, c);
-- 使用索引(最左前缀)
SELECT * FROM table1 WHERE a = 1;
SELECT * FROM table1 WHERE a = 1 AND b = 2;
-- 索引失效(缺少最左列)
SELECT * FROM table1 WHERE b = 2; -- 失效
SELECT * FROM table1 WHERE b = 2 AND c = 3; -- 失效
在索引列上计算或使用函数
-- 索引:CREATE INDEX idx_date ON orders(order_date);
-- 索引失效
SELECT * FROM orders WHERE YEAR(order_date) = 2023;
SELECT * FROM orders WHERE order_date + INTERVAL 1 DAY > NOW();
-- 优化后(使用索引)
SELECT * FROM orders WHERE order_date >= '2023-01-01'
AND order_date < '2024-01-01';
隐式类型转换
-- 索引:CREATE INDEX idx_phone ON users(phone); -- phone是varchar
-- 索引失效(数字转为字符串)
SELECT * FROM users WHERE phone = 13800138000;
-- 使用索引(类型匹配)
SELECT * FROM users WHERE phone = '13800138000';
使用!=或NOT IN
-- 可能不使用索引(取决于数据分布)
SELECT * FROM users WHERE status != 1;
SELECT * FROM users WHERE id NOT IN (1, 2, 3);
LIKE以通配符开头
-- 索引:CREATE INDEX idx_name ON users(name);
-- 索引失效
SELECT * FROM users WHERE name LIKE '%john%';
SELECT * FROM users WHERE name LIKE '%john';
-- 使用索引(前缀匹配)
SELECT * FROM users WHERE name LIKE 'john%';
2. 优化器选择不使用索引的情况
数据量很小
-- 表只有100行,全表扫描更快
SELECT * FROM small_table WHERE id = 1;
索引选择性很差
-- status只有0和1两个值
CREATE INDEX idx_status ON users(status); -- 区分度50%
-- 优化器可能选择全表扫描
SELECT * FROM users WHERE status = 1;
覆盖索引 vs 回表查询
-- 查询所有字段,需要回表
SELECT * FROM users WHERE age > 20; -- 可能不使用索引
-- 只查询索引字段,覆盖索引
SELECT age FROM users WHERE age > 20; -- 使用索引
3. 验证索引使用情况
-- 强制使用索引(测试用)
SELECT * FROM users FORCE INDEX(idx_email) WHERE email = 'test@example.com';
-- 查看索引统计信息
ANALYZE TABLE users; -- 更新统计信息
SHOW INDEX FROM users;
-- Cardinality(基数):索引唯一值的数量
-- 越高表示选择性越好
4. 解决方案
创建合适的索引
-- 针对函数查询创建函数索引
CREATE INDEX idx_year ON orders((YEAR(order_date)));
-- 针对前缀匹配
CREATE INDEX idx_name_prefix ON users(name(10)); -- 前10个字符
重写查询
-- 原始(可能不使用索引)
SELECT * FROM orders WHERE status != 'completed';
-- 改写(使用索引)
SELECT * FROM orders WHERE status IN ('pending', 'processing', 'shipped');
使用覆盖索引
-- 添加覆盖索引
CREATE INDEX idx_covering ON users(age, name, email);
-- 查询使用覆盖索引
SELECT name, email FROM users WHERE age > 20;
5. 我的实践经验
- 不要假设索引一定有效,用EXPLAIN验证
- 考虑数据分布,统计信息影响优化器选择
- 定期更新统计信息:
ANALYZE TABLE - 监控慢查询:调整
long_query_time - 使用索引提示谨慎:
USE INDEX、FORCE INDEX
黄金法则:索引是加速查询的工具,但不是万能药。需要根据具体查询模式、数据分布、更新频率来设计和验证。
面试结束
面试官:好的,我们的面试问题就到这里。你回答得很全面,技术深度也不错。有什么问题想问我的吗?
面试者:
谢谢您的肯定。我有几个问题想请教:
- 团队目前主要的技术栈和项目方向是什么?
- 对于这个岗位,您最看重的三个技术能力是什么?
- 团队的技术成长和学习机会是怎样的?
我来为您重新整理和渲染这个思维导图。看起来Mermaid语法对缩进和格式比较敏感。
🔄 修正后的思维导图
版本1:标准格式
版本2:更详细的思维导图
📋 表格版本(备选展示)
unordered_map 方法分类表
| 类别 | 方法 | 描述 | 时间复杂度 |
|---|---|---|---|
| 构造 | unordered_map() |
默认构造 | O(1) |
unordered_map(initializer_list) |
初始化列表构造 | O(n) | |
| 容量 | size() |
返回元素数量 | O(1) |
empty() |
是否为空 | O(1) | |
| 访问 | operator[] |
访问或插入 | 平均O(1) |
at(key) |
访问元素(带检查) | 平均O(1) | |
find(key) |
查找迭代器 | 平均O(1) | |
| 修改 | insert(pair) |
插入元素 | 平均O(1) |
emplace(args) |
原位构造 | 平均O(1) | |
erase(key) |
删除元素 | 平均O(1) | |
clear() |
清空容器 | O(n) | |
| 桶操作 | bucket_count() |
桶的数量 | O(1) |
bucket_size(n) |
第n桶元素数 | O(1) | |
load_factor() |
当前负载因子 | O(1) | |
| 哈希策略 | rehash(n) |
设置桶数 | O(n) |
reserve(n) |
预留空间 | O(n) | |
| 迭代器 | begin()/end() |
首尾迭代器 | O(1) |
cbegin()/cend() |
常量迭代器 | O(1) |
🎨 ASCII 图示版本(纯文本)
unordered_map 结构总览
├── 基础特性
│ ├── 无序存储
│ ├── 哈希表实现
│ ├── 平均O(1)复杂度
│ ├── 键值对容器
│ └── 键唯一性
├── 核心操作
│ ├── 插入操作
│ │ ├── insert()
│ │ ├── emplace()
│ │ └── operator[]
│ ├── 访问操作
│ │ ├── at()
│ │ ├── operator[]
│ │ └── find()
│ ├── 删除操作
│ │ ├── erase()
│ │ └── clear()
│ ├── 查询操作
│ │ ├── find()
│ │ ├── count()
│ │ └── contains()
│ └── 容量操作
│ ├── size()
│ └── empty()
├── 迭代器
│ ├── begin()/end()
│ ├── cbegin()/cend()
│ └── bucket迭代器
├── 桶管理
│ ├── bucket_count()
│ ├── bucket_size()
│ ├── load_factor()
│ └── 哈希策略
├── 内存管理
│ ├── rehash()
│ ├── reserve()
│ └── 最大负载因子
└── 其他功能
├── 交换(swap)
├── 相等比较
└── 自定义哈希函数
unordered_map 详细解析
📊 思维导图:unordered_map 核心概览
🏗️ unordered_map 内部结构图示
┌─────────────────────────────────────────────────────────┐
│ unordered_map │
├─────────┬─────────┬─────────┬─────────┬─────────┬──────┤
│ Bucket 0│ Bucket 1│ Bucket 2│ Bucket 3│ Bucket 4│ ... │
│ ┌─────┐│ ┌─────┐│ ┌─────┐│ ┌─────┐│ ┌─────┐│ │
│ │ ││ │ ││ │ ││ │ ││ │ ││ │
│ │ Key1││ │ ││ │ Key3││ │ Key4││ │ ││ │
│ │ Val1││ │ ││ │ Val3││ │ Val4││ │ ││ │
│ └─────┘│ └─────┘│ └─────┘│ └─────┘│ └─────┘│ │
│ │ │ │ ┌─────┐│ │ │
│ │ │ │ │ Key5││ │ │
│ │ │ │ │ Val5││ │ │
│ │ │ │ └─────┘│ │ │
└─────────┴─────────┴─────────┴─────────┴─────────┴──────┘
↑ ↑ ↑ ↑ ↑
哈希 哈希 哈希 哈希 哈希
函数 函数 函数 函数 函数
↓ ↓ ↓ ↓ ↓
┌──────┬──────┬──────┬──────┬──────┐
│ Key1 │ Key2 │ Key3 │ Key4 │ Key5 │
└──────┴──────┴──────┴──────┴──────┘
📚 详细特性说明
1. 基本性质
- 无序性:元素存储顺序与插入顺序无关,由哈希值决定
- 唯一键:每个键只能在容器中出现一次
- 哈希表实现:基于桶(bucket)的哈希表
- 时间复杂度:
- 平均情况:O(1) 查找、插入、删除
- 最坏情况:O(n) 所有元素哈希冲突时
2. 模板参数
template<
class Key,
class T,
class Hash = std::hash<Key>,
class KeyEqual = std::equal_to<Key>,
class Allocator = std::allocator<std::pair<const Key, T>>
> class unordered_map;
🔧 核心方法详解
1. 构造与赋值
// 1. 默认构造
unordered_map<int, string> map1;
// 2. 初始化列表构造
unordered_map<int, string> map2 = {{1, "one"}, {2, "two"}};
// 3. 范围构造
vector<pair<int, string>> vec = {{3, "three"}, {4, "four"}};
unordered_map<int, string> map3(vec.begin(), vec.end());
// 4. 复制构造
unordered_map<int, string> map4(map3);
// 5. 移动构造
unordered_map<int, string> map5(std::move(map4));
2. 插入操作
unordered_map<string, int> umap;
// 方法1: insert
umap.insert({"apple", 1});
umap.insert(make_pair("banana", 2));
// 方法2: emplace (原位构造,效率更高)
umap.emplace("cherry", 3);
// 方法3: operator[] (不存在则创建)
umap["date"] = 4;
// 方法4: insert_or_assign (C++17)
umap.insert_or_assign("apple", 5); // 更新已存在的值
3. 访问操作
// 方法1: operator[] (若键不存在则创建)
int val = umap["apple"];
// 方法2: at() (若键不存在则抛出异常)
try {
int val = umap.at("nonexistent");
} catch (const out_of_range& e) {
cout << "Key not found!" << endl;
}
// 方法3: find() (安全访问)
auto it = umap.find("banana");
if (it != umap.end()) {
cout << "Value: " << it->second << endl;
}
4. 删除操作
// 方法1: erase by iterator
auto it = umap.find("apple");
if (it != umap.end()) {
umap.erase(it);
}
// 方法2: erase by key
size_t removed = umap.erase("banana"); // 返回删除的元素数(0或1)
// 方法3: erase by range
umap.erase(umap.begin(), umap.end()); // 删除所有
// 方法4: clear
umap.clear();
5. 查找与统计
// 检查键是否存在 (C++20)
if (umap.contains("apple")) {
cout << "Found apple!" << endl;
}
// 统计键的出现次数(对unordered_map只能是0或1)
size_t count = umap.count("apple");
// find返回迭代器
auto it = umap.find("cherry");
if (it != umap.end()) {
// 使用 it->first 和 it->second
}
6. 桶操作与哈希策略
unordered_map<int, string> umap = {{1, "a"}, {2, "b"}, {3, "c"}};
// 桶数量
cout << "Bucket count: " << umap.bucket_count() << endl;
// 特定桶的元素数
for (size_t i = 0; i < umap.bucket_count(); ++i) {
cout << "Bucket " << i << " size: " << umap.bucket_size(i) << endl;
}
// 键所在的桶索引
size_t bucket = umap.bucket(2);
// 负载因子(元素数/桶数)
float lf = umap.load_factor();
// 最大负载因子
float max_lf = umap.max_load_factor();
// 调整桶数量
umap.rehash(100); // 至少100个桶
umap.reserve(1000); // 为至少1000个元素预留空间
📈 性能特点图示
时间复杂度对比
操作 | 平均情况 | 最坏情况
-------------|----------|----------
插入(insert) | O(1) | O(n)
查找(find) | O(1) | O(n)
删除(erase) | O(1) | O(n)
访问(at/[]) | O(1) | O(n)
遍历 | O(n) | O(n)
负载因子影响
负载因子低(0.5): 负载因子高(0.9):
桶多,元素分散 桶少,元素集中
查找快但内存占用大 查找慢但内存占用小
┌─┬─┬─┬─┬─┐ ┌────┬────┬────┐
│•│ │•│ │ │ │••• │•• │••• │
└─┴─┴─┴─┴─┘ └────┴────┴────┘
💡 最佳实践示例
#include <iostream>
#include <unordered_map>
#include <string>
// 自定义键类型
struct Person {
std::string name;
int age;
bool operator==(const Person& other) const {
return name == other.name && age == other.age;
}
};
// 自定义哈希函数
struct PersonHash {
size_t operator()(const Person& p) const {
return hash<string>()(p.name) ^ (hash<int>()(p.age) << 1);
}
};
int main() {
// 使用自定义类型的unordered_map
unordered_map<Person, string, PersonHash> people;
// 插入示例
people.insert({{"Alice", 30}, "Engineer"});
people.emplace(Person{"Bob", 25}, "Doctor");
// 遍历unordered_map (无序)
for (const auto& [person, job] : people) {
cout << person.name << ": " << job << endl;
}
// 性能优化:预分配
unordered_map<int, string> largeMap;
largeMap.reserve(10000); // 预分配空间,避免重新哈希
return 0;
}
STL容器与算法库简明示例
📦 STL容器分类
1. 序列容器 (Sequence Containers)
// vector - 动态数组
vector<int> v = {1, 2, 3};
v.push_back(4); // 末尾添加
// list - 双向链表
list<int> l = {1, 2, 3};
l.push_front(0); // 头部添加
// deque - 双端队列
deque<int> d = {1, 2, 3};
d.push_back(4); // 末尾添加
d.push_front(0); // 头部添加
2. 关联容器 (Associative Containers)
// set - 有序不重复集合
set<int> s = {3, 1, 4, 1, 5}; // {1, 3, 4, 5}
s.insert(2); // 自动排序
// map - 有序键值对
map<string, int> m = {{"Alice", 95}, {"Bob", 88}};
m["Charlie"] = 92; // 添加元素
3. 无序关联容器 (Unordered Associative Containers)
// unordered_set - 哈希集合
unordered_set<int> us = {3, 1, 4, 1, 5};
// unordered_map - 哈希映射
unordered_map<string, int> um;
um["apple"] = 3; // O(1)插入
4. 容器适配器 (Container Adaptors)
// stack - 栈(LIFO)
stack<int> stk;
stk.push(1); // 压栈
stk.pop(); // 弹栈
// queue - 队列(FIFO)
queue<int> q;
q.push(1); // 入队
q.pop(); // 出队
// priority_queue - 优先队列(堆)
priority_queue<int> pq; // 默认最大堆
pq.push(3);
pq.push(1);
pq.push(4); // 顶部为4
🔧 STL算法分类
1. 非修改序列算法
#include <algorithm>
vector<int> v = {1, 2, 3, 4, 5};
// find - 查找元素
auto it = find(v.begin(), v.end(), 3); // 返回迭代器
// count - 计数
int cnt = count(v.begin(), v.end(), 3); // 返回1
// all_of/any_of/none_of - 条件判断
bool all_even = all_of(v.begin(), v.end(), [](int x) {
return x % 2 == 0;
});
2. 修改序列算法
vector<int> v = {1, 2, 3, 4, 5};
// copy - 复制元素
vector<int> dest(5);
copy(v.begin(), v.end(), dest.begin());
// transform - 转换元素
transform(v.begin(), v.end(), v.begin(),
[](int x) { return x * 2; }); // 每个元素乘2
// replace - 替换元素
replace(v.begin(), v.end(), 3, 30); // 3替换为30
// reverse - 反转序列
reverse(v.begin(), v.end());
3. 排序与搜索算法
vector<int> v = {5, 3, 1, 4, 2};
// sort - 排序
sort(v.begin(), v.end()); // {1, 2, 3, 4, 5}
// binary_search - 二分查找
bool found = binary_search(v.begin(), v.end(), 3); // 必须已排序
// lower_bound/upper_bound - 边界查找
auto lb = lower_bound(v.begin(), v.end(), 3); // 第一个≥3的位置
auto ub = upper_bound(v.begin(), v.end(), 3); // 第一个>3的位置
4. 数值算法
#include <numeric>
vector<int> v = {1, 2, 3, 4, 5};
// accumulate - 累加
int sum = accumulate(v.begin(), v.end(), 0); // 0+1+2+3+4+5=15
int product = accumulate(v.begin(), v.end(), 1,
multiplies<int>()); // 1*1*2*3*4*5=120
// partial_sum - 部分和
vector<int> prefix(v.size());
partial_sum(v.begin(), v.end(), prefix.begin()); // {1,3,6,10,15}
// inner_product - 内积(点积)
vector<int> a = {1, 2, 3};
vector<int> b = {4, 5, 6};
int dot = inner_product(a.begin(), a.end(), b.begin(), 0); // 32
5. 堆算法
vector<int> v = {4, 1, 3, 5, 2};
// make_heap - 建堆
make_heap(v.begin(), v.end()); // {5,4,3,1,2}
// push_heap - 插入堆(先push_back,再push_heap)
v.push_back(6);
push_heap(v.begin(), v.end());
// pop_heap - 弹出堆顶
pop_heap(v.begin(), v.end()); // 堆顶移到最后
v.pop_back(); // 移除堆顶
6. 常用工具算法
vector<int> v = {1, 2, 3, 4, 5};
// max/min - 最值
int mx = max(10, 20); // 20
int mn = min({1, 2, 3}); // 1
// swap - 交换
int a = 5, b = 10;
swap(a, b); // a=10,b=5
// fill - 填充
fill(v.begin(), v.end(), 0); // 全部填充为0
// generate - 生成
int n = 1;
generate(v.begin(), v.end(), [&n]() { return n++; }); // {1,2,3,4,5}
🎯 常用算法组合示例
1. 删除重复元素
vector<int> v = {1, 2, 2, 3, 3, 3, 4};
sort(v.begin(), v.end()); // 先排序
auto last = unique(v.begin(), v.end()); // 移动重复元素
v.erase(last, v.end()); // 删除尾部重复
2. 查找与计数
vector<int> v = {1, 2, 3, 4, 5, 5, 5};
auto range = equal_range(v.begin(), v.end(), 5); // 查找相等范围
int count5 = range.second - range.first; // 5出现次数:3
3. 自定义排序
vector<pair<int, string>> people = {{25, "Bob"}, {20, "Alice"}, {30, "Charlie"}};
// 按年龄升序
sort(people.begin(), people.end());
// 按姓名排序
sort(people.begin(), people.end(),
[](auto& a, auto& b) { return a.second < b.second; });
📊 STL算法复杂度速查
| 算法 | 平均复杂度 | 说明 |
|---|---|---|
| find/count | O(n) | 线性查找 |
| binary_search | O(log n) | 二分查找,需已排序 |
| sort | O(n log n) | 快速排序/内省排序 |
| stable_sort | O(n log n) | 稳定排序 |
| nth_element | O(n) | 找到第n小元素 |
| make_heap | O(n) | 建堆 |
| push/pop_heap | O(log n) | 堆操作 |
| accumulate | O(n) | 遍历累加 |
| copy/fill | O(n) | 遍历操作 |
💡 实用技巧
- 使用auto简化迭代器:
auto it = find(v.begin(), v.end(), value);
for (auto& x : container) // 范围for循环
- lambda表达式配合算法:
auto even_count = count_if(v.begin(), v.end(),
[](int x) { return x % 2 == 0; });
- 预分配空间提升性能:
vector<int> v;
v.reserve(1000); // 预分配空间
STL容器与算法库(续)
📦 更多STL容器示例
5. 有序关联容器(补充)
// multiset - 可重复有序集合
multiset<int> ms = {3, 1, 4, 1, 5}; // {1, 1, 3, 4, 5}
ms.insert(1); // 可以重复插入
// multimap - 可重复键值对
multimap<string, int> mm;
mm.insert({"Alice", 95});
mm.insert({"Alice", 88}); // 允许相同键
6. bitset - 位集合
#include <bitset>
bitset<8> bs1(42); // 00101010 (42的二进制)
bitset<8> bs2("10101010");
bs1.set(0); // 设置第0位为1
bs1.reset(1); // 设置第1位为0
bs1.flip(2); // 翻转第2位
int count = bs1.count(); // 统计1的个数
7. array - 固定大小数组
#include <array>
array<int, 5> arr = {1, 2, 3, 4, 5};
arr.fill(0); // 全部填充为0
int size = arr.size(); // 固定大小5
// 类似原生数组,但有STL接口
8. forward_list - 单向链表
#include <forward_list>
forward_list<int> fl = {1, 2, 3};
fl.push_front(0); // 只能从头部添加
fl.insert_after(fl.begin(), 99); // 在指定位置后插入
🔧 更多STL算法示例
7. 集合操作算法(需已排序)
vector<int> a = {1, 2, 3, 4, 5};
vector<int> b = {3, 4, 5, 6, 7};
vector<int> result;
// 并集
set_union(a.begin(), a.end(), b.begin(), b.end(),
back_inserter(result)); // {1,2,3,4,5,6,7}
// 交集
result.clear();
set_intersection(a.begin(), a.end(), b.begin(), b.end(),
back_inserter(result)); // {3,4,5}
// 差集 (a-b)
result.clear();
set_difference(a.begin(), a.end(), b.begin(), b.end(),
back_inserter(result)); // {1,2}
8. 分区算法
vector<int> v = {1, 2, 3, 4, 5, 6, 7, 8, 9};
// partition - 按条件分区
auto it = partition(v.begin(), v.end(),
[](int x) { return x % 2 == 0; });
// 偶数在前,奇数在后,返回分界点
// is_partitioned - 检查是否已分区
bool partitioned = is_partitioned(v.begin(), v.end(),
[](int x) { return x % 2 == 0; });
9. 排列算法
vector<int> v = {1, 2, 3};
// 生成下一个排列
do {
// 处理当前排列
} while (next_permutation(v.begin(), v.end()));
// 生成上一个排列
prev_permutation(v.begin(), v.end());
// 检查是否是排列
is_permutation(v.begin(), v.end(), other.begin());
10. 移动和交换算法
vector<string> src = {"hello", "world"};
vector<string> dst(2);
// move - 移动元素
move(src.begin(), src.end(), dst.begin());
// src现在为空字符串(已移动)
// swap_ranges - 交换范围
vector<int> a = {1, 2, 3};
vector<int> b = {4, 5, 6};
swap_ranges(a.begin(), a.end(), b.begin());
// a={4,5,6}, b={1,2,3}
11. 生成算法
vector<int> v(5);
// iota - 填充递增序列
iota(v.begin(), v.end(), 10); // {10, 11, 12, 13, 14}
// generate - 用函数生成
int n = 0;
generate(v.begin(), v.end(), [&n]() { return n++ * 2; });
// generate_n - 生成前n个
vector<int> result;
generate_n(back_inserter(result), 5, rand); // 5个随机数
12. 比较算法
vector<int> a = {1, 2, 3};
vector<int> b = {1, 2, 3};
// equal - 判断相等
bool same = equal(a.begin(), a.end(), b.begin());
// mismatch - 查找第一个不同点
auto mismatch_pair = mismatch(a.begin(), a.end(), b.begin());
// lexicographical_compare - 字典序比较
bool less = lexicographical_compare(a.begin(), a.end(),
b.begin(), b.end());
🎯 实用算法组合
4. 移除特定元素
vector<int> v = {1, 2, 3, 4, 5, 2, 3};
// 移除所有值为2的元素(逻辑移除)
auto new_end = remove(v.begin(), v.end(), 2);
v.erase(new_end, v.end()); // 物理删除
// 移除满足条件的元素
new_end = remove_if(v.begin(), v.end(),
[](int x) { return x % 2 == 0; });
v.erase(new_end, v.end());
5. 采样算法(C++17)
vector<int> population = {1, 2, 3, 4, 5, 6, 7, 8, 9, 10};
vector<int> sample(3); // 采样3个元素
// 随机采样(需要C++17)
sample(population.begin(), population.end(),
sample.begin(), sample.size(),
mt19937{random_device{}()});
6. 数据变换与收集
vector<int> nums = {1, 2, 3, 4, 5};
// 变换并收集结果
vector<int> squares;
transform(nums.begin(), nums.end(),
back_inserter(squares),
[](int x) { return x * x; });
// squares = {1, 4, 9, 16, 25}
// 过滤并收集
vector<int> evens;
copy_if(nums.begin(), nums.end(),
back_inserter(evens),
[](int x) { return x % 2 == 0; });
// evens = {2, 4}
🔄 迭代器适配器
1. 插入迭代器
vector<int> v = {1, 2, 3};
// back_inserter - 尾部插入
copy(v.begin(), v.end(), back_inserter(v)); // 自我复制
// front_inserter - 头部插入(需要支持push_front)
list<int> l;
copy(v.begin(), v.end(), front_inserter(l));
// inserter - 指定位置插入
vector<int> dest;
copy(v.begin(), v.end(), inserter(dest, dest.begin()));
2. 流迭代器
#include <iterator>
#include <sstream>
// 从输入流读取
vector<int> numbers;
copy(istream_iterator<int>(cin), istream_iterator<int>(),
back_inserter(numbers));
// 输出到流
copy(v.begin(), v.end(), ostream_iterator<int>(cout, " "));
// 字符串流处理
stringstream ss("1 2 3 4 5");
vector<int> from_ss;
copy(istream_iterator<int>(ss), istream_iterator<int>(),
back_inserter(from_ss));
3. 反向迭代器
vector<int> v = {1, 2, 3, 4, 5};
// 反向遍历
for (auto rit = v.rbegin(); rit != v.rend(); ++rit) {
cout << *rit << " "; // 5 4 3 2 1
}
// 反向查找
auto rit = find(v.rbegin(), v.rend(), 3); // 从后往前找
💡 STL实用技巧
1. 谓词函数对象
#include <functional>
// 使用预定义的函数对象
vector<int> v = {1, 2, 3, 4, 5};
// 算术运算
transform(v.begin(), v.end(), v.begin(),
bind(multiplies<int>(), placeholders::_1, 2));
// 逻辑运算
auto it = find_if(v.begin(), v.end(),
bind(greater<int>(), placeholders::_1, 3));
2. lambda表达式进阶
// 带捕获列表的lambda
int threshold = 3;
auto count_above = count_if(v.begin(), v.end(),
[threshold](int x) { return x > threshold; });
// 泛型lambda(C++14)
auto print = [](const auto& item) { cout << item << " "; };
for_each(v.begin(), v.end(), print);
// mutable lambda(可修改捕获变量)
int counter = 0;
auto inc_counter = [counter]() mutable { return ++counter; };
3. 算法性能优化
// 预分配空间避免重新分配
vector<int> large;
large.reserve(1000000);
// 使用emplace_back避免临时对象
vector<pair<int, string>> pairs;
pairs.emplace_back(1, "one"); // 原位构造
// 使用移动语义
vector<string> moved;
move(src.begin(), src.end(), back_inserter(moved));
📊 算法选择指南
| 需求场景 | 推荐算法 | 复杂度 |
|---|---|---|
| 简单查找 | find() |
O(n) |
| 有序查找 | binary_search() |
O(log n) |
| 条件查找 | find_if() |
O(n) |
| 条件计数 | count_if() |
O(n) |
| 排序 | sort() |
O(n log n) |
| 稳定排序 | stable_sort() |
O(n log n) |
| 部分排序 | partial_sort() |
O(n log k) |
| 第k小元素 | nth_element() |
O(n) |
| 合并有序序列 | merge() |
O(n) |
| 就地合并 | inplace_merge() |
O(n log n) |
🎯 综合示例
// 学生成绩管理系统示例
struct Student {
string name;
int score;
};
vector<Student> students = {
{"Alice", 85}, {"Bob", 92}, {"Charlie", 78}
};
// 1. 按成绩排序
sort(students.begin(), students.end(),
[](const Student& a, const Student& b) {
return a.score > b.score;
});
// 2. 查找及格学生
auto pass_it = find_if(students.begin(), students.end(),
[](const Student& s) { return s.score >= 60; });
// 3. 计算平均分
double avg = accumulate(students.begin(), students.end(), 0.0,
[](double sum, const Student& s) {
return sum + s.score;
}) / students.size();
// 4. 提取所有分数
vector<int> scores;
transform(students.begin(), students.end(),
back_inserter(scores),
[](const Student& s) { return s.score; });
// 5. 最高分和最低分
auto minmax = minmax_element(scores.begin(), scores.end());
STL容器与算法库(最终补充)
🔄 容器与算法的高级用法
1. 容器类型推导(C++17)
// 类模板参数推导
vector v = {1, 2, 3}; // 自动推导为 vector<int>
pair p(1, "hello"); // 自动推导为 pair<int, const char*>
map m = {{1, "a"}, {2, "b"}}; // 自动推导为 map<int, string>
2. 视图和范围适配器(C++20)
#include <ranges>
vector<int> nums = {1, 2, 3, 4, 5, 6, 7, 8, 9};
// 范围视图,延迟计算
auto even_squares = nums | views::filter([](int x) { return x % 2 == 0; })
| views::transform([](int x) { return x * x; });
// 范围算法
sort(nums); // C++20 可以直接对整个容器排序
auto found = find(nums, 5); // 直接查找
3. 内存管理算法
// 未初始化内存操作
vector<int> v = {1, 2, 3, 4, 5};
// 在未初始化内存上构造对象
int* buffer = static_cast<int*>(malloc(v.size() * sizeof(int)));
uninitialized_copy(v.begin(), v.end(), buffer); // 复制构造
// 销毁对象但不释放内存
destroy(buffer, buffer + v.size());
free(buffer);
4. 自定义分配器
template<typename T>
class MyAllocator {
public:
using value_type = T;
// ... 实现分配器接口
};
// 使用自定义分配器
vector<int, MyAllocator<int>> custom_vec;
custom_vec.push_back(42);
🎮 算法组合模式
1. 管道模式
// 多个算法链式调用
vector<int> process_data(vector<int> data) {
// 删除负数和零,排序,去重
data.erase(remove_if(data.begin(), data.end(),
[](int x) { return x <= 0; }),
data.end());
sort(data.begin(), data.end());
data.erase(unique(data.begin(), data.end()), data.end());
return data;
}
2. 生成器模式
// 生成测试数据
vector<int> generate_test_data(int n) {
vector<int> data;
data.reserve(n);
// 生成随机数
generate_n(back_inserter(data), n,
[]() { return rand() % 100; });
// 打乱顺序
random_shuffle(data.begin(), data.end());
return data;
}
3. 观察者模式
// 在算法执行过程中收集信息
vector<int> v = {1, 2, 3, 4, 5};
vector<int> log;
// 记录所有被处理的元素
transform(v.begin(), v.end(), v.begin(),
[&log](int x) {
int result = x * 2;
log.push_back(result); // 记录日志
return result;
});
🔧 性能优化技巧
1. 避免不必要的拷贝
// 使用移动语义
vector<vector<int>> split_vector(const vector<int>& data) {
vector<vector<int>> result;
result.reserve(data.size() / 10);
// 使用移动避免拷贝
for (size_t i = 0; i < data.size(); i += 10) {
vector<int> chunk;
if (i + 10 <= data.size()) {
chunk.assign(data.begin() + i, data.begin() + i + 10);
} else {
chunk.assign(data.begin() + i, data.end());
}
result.push_back(move(chunk)); // 移动而非拷贝
}
return result;
}
2. 缓存友好访问
// 连续内存访问模式
void process_cache_friendly(vector<vector<int>>& matrix) {
// 行优先访问(缓存友好)
for (size_t i = 0; i < matrix.size(); ++i) {
for (size_t j = 0; j < matrix[i].size(); ++j) {
matrix[i][j] *= 2;
}
}
}
3. 批量操作
// 批量插入提高性能
void batch_insert(vector<int>& dest, const vector<int>& src) {
// 批量插入比逐个插入快
dest.insert(dest.end(), src.begin(), src.end());
// 或者使用 copy
copy(src.begin(), src.end(), back_inserter(dest));
}
📊 容器选择指南
| 使用场景 | 推荐容器 | 原因 |
|---|---|---|
| 随机访问频繁 | vector |
连续内存,缓存友好 |
| 头部插入频繁 | deque |
两端高效插入 |
| 中间插入频繁 | list |
O(1)插入删除 |
| 需要排序 | set/map |
自动排序 |
| 快速查找 | unordered_set/map |
O(1)平均查找 |
| 后进先出 | stack |
栈语义 |
| 先进先出 | queue |
队列语义 |
| 优先级处理 | priority_queue |
堆实现 |
🛠️ 调试和测试技巧
1. 调试输出
// 打印容器内容
template<typename Container>
void print_container(const Container& c, const string& name = "") {
if (!name.empty()) cout << name << ": ";
copy(c.begin(), c.end(), ostream_iterator<typename Container::value_type>(cout, " "));
cout << endl;
}
// 使用示例
print_container(vector<int>{1,2,3}, "Vector");
2. 验证算法正确性
bool test_algorithm() {
vector<int> input = {3,1,4,1,5,9,2,6};
vector<int> expected = {1,1,2,3,4,5,6,9};
// 测试排序算法
vector<int> result = input;
sort(result.begin(), result.end());
// 验证结果
return equal(result.begin(), result.end(),
expected.begin(), expected.end());
}
🚀 现代C++特性
1. 结构化绑定(C++17)
// 更方便地处理pair和tuple
map<int, string> m = {{1, "one"}, {2, "two"}};
for (const auto& [key, value] : m) {
cout << key << ": " << value << endl;
}
// 多返回值
tuple<int, string, double> get_info() { return {1, "test", 3.14}; }
auto [id, name, score] = get_info();
2. optional和variant(C++17)
#include <optional>
#include <variant>
// optional处理可能不存在的值
optional<int> find_value(const vector<int>& v, int target) {
auto it = find(v.begin(), v.end(), target);
return it != v.end() ? optional<int>(*it) : nullopt;
}
// variant处理多种类型
variant<int, string, double> data = "hello";
📝 最后建议
- 掌握基础:先熟练掌握vector、map、sort、find等最常用的容器和算法
- 理解原理:了解容器内部实现(如哈希表、红黑树)和算法复杂度
- 实践为主:通过实际项目练习,解决真实问题
- 关注性能:学会分析和优化算法性能
- 保持更新:学习C++新标准带来的新特性
STL是C++编程的基石,熟练掌握STL能显著提高编程效率和代码质量。记住:正确的数据结构和算法选择往往比代码优化更重要!
STL核心思想:
- 泛型编程
- 算法与容器分离
- 迭代器作为桥梁
- 函数对象提供策略
Linux文件系统和信号面试题及回答(20例)
一、文件系统相关
1. 问题:Linux文件系统的层次结构是怎样的?
考察点:对FHS(文件系统层次结构标准)的理解
回答示例:
Linux文件系统遵循FHS标准,主要目录包括:
/:根目录,所有目录的起点/bin:存放系统必备命令(如ls、cp等)/etc:系统配置文件目录/home:普通用户主目录/root:管理员主目录/var:可变数据(日志、邮件等)/tmp:临时文件,系统重启会清理/usr:用户程序和数据,包含/usr/bin、/usr/lib等/boot:启动加载文件/dev:设备文件/lib:共享库和内核模块/opt:可选应用软件包/proc:虚拟文件系统,提供内核和进程信息/sys:虚拟文件系统,提供内核设备信息
2. 问题:什么是inode?包含哪些信息?
考察点:对inode概念的理解
回答示例:
inode(索引节点)是Linux文件系统中的数据结构,存储文件的元数据(不包括文件名):
- 文件大小
- 设备ID
- 文件所有者UID/GID
- 文件权限(rwx)
- 时间戳(atime、ctime、mtime)
- 链接数
- 文件数据块的位置指针
每个inode有唯一编号,可用ls -i查看。文件名存储在目录项中,通过inode编号指向实际文件。
3. 问题:软链接和硬链接的区别?
考察点:理解两种链接机制
回答示例:
主要区别:
-
硬链接:
- 多个文件名指向同一个inode
- 不能跨文件系统
- 不能链接目录
- 删除原文件不影响链接文件
- 创建命令:
ln source link
-
软链接(符号链接):
- 独立的文件,内容为目标路径
- 可以跨文件系统
- 可以链接目录
- 原文件删除后链接失效(悬空链接)
- 创建命令:
ln -s source link
4. 问题:文件权限rwxr-xr–的含义?
考察点:理解Linux权限表示法
回答示例:
权限字符串rwxr-xr--分为四部分:
- 第一位
-表示文件类型(-普通文件,d目录,l链接等) - 第2-4位
rwx:所有者权限(读、写、执行) - 第5-7位
r-x:所属组权限(读、执行,无写) - 第8-10位
r--:其他用户权限(只读)
数字表示为754:
- 所有者:rwx = 4+2+1 = 7
- 所属组:r-x = 4+0+1 = 5
- 其他用户:r-- = 4+0+0 = 4
5. 问题:如何修改文件权限和所有权?
考察点:常用文件管理命令
回答示例:
- 修改权限:
chmod 755 file.txt # 数字形式 chmod u+x,g-w,o=r file.txt # 符号形式 - 修改所有者:
chown user:group file.txt chown user file.txt - 修改所属组:
chgrp group file.txt - 递归修改:加
-R参数
6. 问题:find命令如何查找7天前的.log文件并删除?
考察点:find命令高级用法
回答示例:
# 查找并删除7天前的.log文件
find /path -name "*.log" -mtime +7 -delete
# 或先查看确认再删除
find /path -name "*.log" -mtime +7 -exec rm {} \;
# 解释:
# -mtime +7:修改时间超过7天
# -mtime 7:正好7天
# -mtime -7:7天以内
7. 问题:什么是文件描述符?标准文件描述符有哪些?
考察点:对I/O重定向的理解
回答示例:
文件描述符是内核为进程打开文件分配的整数标识。标准文件描述符:
0:标准输入(stdin)1:标准输出(stdout)2:标准错误(stderr)
使用示例:
# 重定向标准错误到文件
command 2> error.log
# 重定向标准输出和错误到同一文件
command &> output.log
# 追加输出
command >> output.log 2>&1
8. 问题:df和du命令的区别?
考察点:磁盘空间管理命令
回答示例:
- df:显示文件系统磁盘空间使用情况
df -h # 人类可读格式 df -i # 查看inode使用情况 - du:估算文件和目录的磁盘使用量
du -sh directory # 查看目录总大小 du -ah # 显示所有文件大小
主要区别:df报告文件系统级别的使用情况,du报告具体文件/目录的大小。
9. 问题:如何监控文件变化?
考察点:文件监控工具
回答示例:
- tail -f:实时查看文件追加内容
tail -f /var/log/syslog - inotifywait:监控文件系统事件
inotifywait -m /path -e create,modify,delete - watch:定期执行命令
watch -n 1 'ls -l file.txt'
10. 问题:ext4文件系统的特点?
考察点:常见文件系统知识
回答示例:
ext4是Linux最常用的文件系统,特点:
- 向后兼容:可挂载ext2/ext3为ext4
- 大文件支持:最大1EB文件,16TB文件系统
- extent分配:减少碎片,提高大文件性能
- 日志校验:提高可靠性
- 延迟分配:减少碎片,改善性能
- 持久预分配:适合数据库等应用
- 纳秒时间戳:更精细的时间记录
11. 问题:什么是umask?如何设置?
考察点:默认权限管理
回答示例:
umask是权限掩码,控制新建文件的默认权限:
- 目录默认权限:777 - umask
- 文件默认权限:666 - umask(不会获得执行权限)
设置方法:
umask 022 # 临时设置
# 结果:目录755,文件644
# 永久设置:写入~/.bashrc或/etc/profile
echo "umask 022" >> ~/.bashrc
12. 问题:/proc文件系统的作用?
考察点:虚拟文件系统理解
回答示例:
/proc是内存中的虚拟文件系统,提供:
- 进程信息:
/proc/[pid]/包含进程详情 - 系统信息:
/proc/cpuinfo、/proc/meminfo - 内核参数:
/proc/sys/可动态调整内核参数 - 设备信息:
/proc/devices、/proc/interrupts
示例用法:
cat /proc/cpuinfo # CPU信息
cat /proc/meminfo # 内存信息
cat /proc/1/status # init进程状态
echo 1 > /proc/sys/net/ipv4/ip_forward # 启用IP转发
二、信号相关
13. 问题:常见信号及其作用?
考察点:信号基础知识
回答示例:
常见信号:
- SIGHUP(1):终端挂起,守护进程重读配置
- SIGINT(2):中断(Ctrl+C),终止进程
- SIGQUIT(3):退出(Ctrl+\),终止并产生core
- SIGKILL(9):强制终止,不可捕获或忽略
- SIGTERM(15):优雅终止,可被捕获处理
- SIGSTOP(19):暂停进程,不可捕获
- SIGCONT(18):继续执行已暂停进程
- SIGCHLD(17):子进程状态改变
14. 问题:SIGKILL和SIGTERM的区别?
考察点:信号处理机制
回答示例:
关键区别:
-
SIGTERM:
- 允许进程执行清理操作
- 可被捕获、忽略或自定义处理
- 是默认的kill命令信号
-
SIGKILL:
- 立即强制终止进程
- 不可被捕获、忽略或自定义处理
- 系统最后的终止手段
最佳实践:先发送SIGTERM,如果进程不响应,再使用SIGKILL。
15. 问题:如何发送信号给进程?
考察点:信号发送命令
回答示例:
- kill命令:
kill -9 PID # 发送SIGKILL kill -TERM PID # 发送SIGTERM kill -l # 列出所有信号 - killall命令:
killall -9 process_name - pkill命令:
pkill -f pattern - 键盘发送:
- Ctrl+C:SIGINT
- Ctrl+Z:SIGSTOP
- Ctrl+\:SIGQUIT
16. 问题:什么是僵尸进程?如何产生和清理?
考察点:进程状态管理
回答示例:
僵尸进程是已终止但父进程未读取其退出状态的进程:
- 产生原因:子进程退出,父进程未调用wait()/waitpid()
- 特点:不占用内存,但占用进程表项
- 查看:
ps aux | grep Z
清理方法:
- 等待父进程调用wait()
- 杀死父进程(僵尸由init接管并清理)
- 发送SIGCHLD信号给父进程
kill -CHLD PPID
17. 问题:如何捕获和处理信号?
考察点:信号编程知识
回答示例:
在Shell脚本中:
#!/bin/bash
# 捕获SIGINT信号
trap 'echo "Interrupt received"; exit' INT
# 忽略SIGTERM
trap '' TERM
# 脚本内容
while true; do
echo "Running..."
sleep 1
done
在C程序中:
#include <signal.h>
void handler(int sig) {
// 处理信号
}
signal(SIGINT, handler); // 传统方法
// 或使用更安全的sigaction()
18. 问题:nohup和&的区别?
考察点:进程后台运行机制
回答示例:
- &:将进程放到后台运行,但会收到SIGHUP(终端关闭时退出)
- nohup:忽略SIGHUP信号,终端关闭后继续运行
- 组合使用:
nohup command &既后台运行又忽略挂起
示例:
# 后台运行,但终端关闭会终止
./server &
# 忽略挂起,但前台运行
nohup ./server
# 最佳实践:后台运行且忽略挂起
nohup ./server > output.log 2>&1 &
19. 问题:守护进程如何避免被信号终止?
考察点:守护进程设计
回答示例:
守护进程应正确处理信号:
- 忽略无关信号:
signal(SIGHUP, SIG_IGN); signal(SIGPIPE, SIG_IGN); - 捕获关键信号:
signal(SIGTERM, graceful_shutdown); signal(SIGUSR1, reload_config); - 使用sigaction:更安全可靠
- 设置信号掩码:使用sigprocmask()
20. 问题:信号在进程间通信中的优缺点?
考察点:对IPC机制的综合理解
回答示例:
优点:
- 简单轻量,开销小
- 异步通知,不阻塞进程
- 标准统一,跨平台性好
缺点:
- 信号数量有限(通常31个)
- 不能传递复杂数据
- 可能丢失(不排队)
- 非可靠信号(1-31)可能被覆盖
- 处理函数需要考虑重入问题
适用场景:简单事件通知、进程控制、超时处理等。
Linux进程、线程和可执行文件面试题及回答(20例)
一、进程相关
1. 问题:什么是进程?进程与程序的区别?
考察点:进程基本概念,与程序的区别
回答示例:
进程是正在执行的程序的实例,是系统资源分配和调度的基本单位。它包含程序代码、数据、堆栈、寄存器状态以及打开的文件描述符等。
区别:
- 程序:静态的,存储在磁盘上的可执行文件。
- 进程:动态的,程序的一次执行过程,有生命周期(创建、执行、终止)。
- 资源:程序不占用系统资源(除磁盘空间),进程占用CPU、内存等。
- 存在形式:程序是文件,进程是内存中的数据结构。
2. 问题:进程的创建过程(fork和exec)?
考察点:进程创建系统调用
回答示例:
Linux创建新进程通常通过fork()和exec()系列函数:
-
fork():创建当前进程的副本(子进程)
- 子进程获得父进程的数据段、堆栈的副本
- 父子进程共享代码段
- fork返回两次:父进程返回子进程PID,子进程返回0
-
exec():用新程序替换当前进程
- 替换文本段、数据段、堆栈等
- 进程PID不变
- 常见的exec族函数:execl、execv、execle、execve等
典型使用模式:
pid_t pid = fork();
if (pid == 0) {
// 子进程
execvp("ls", args);
exit(1); // 如果exec失败
} else if (pid > 0) {
// 父进程
wait(NULL);
}
3. 问题:僵尸进程和孤儿进程?
考察点:进程状态
回答示例:
- 孤儿进程:父进程先于子进程终止,子进程被init进程(PID=1)收养。无害,init会等待其结束。
- 僵尸进程:子进程终止,但父进程尚未调用wait()获取其退出状态。此时子进程为僵尸状态(占据进程表项,但已释放大部分资源)。
危害:僵尸进程过多会占用进程表项,导致新进程无法创建。
处理:
# 查找僵尸进程
ps aux | grep Z
# 处理:杀死父进程
kill -9 PPID
# 或发送SIGCHLD信号
kill -CHLD PPID
4. 问题:wait和waitpid的区别?
考察点:进程等待系统调用
回答示例:
两者都用于父进程等待子进程状态改变,主要区别:
- wait:阻塞直到任意一个子进程终止
- waitpid:可以指定等待哪个子进程,且可以设置非阻塞选项
#include <sys/wait.h>
// wait示例
int status;
pid_t child_pid = wait(&status);
// waitpid示例
pid_t child_pid = waitpid(specific_pid, &status, WNOHANG);
参数说明:
pid参数:-
0:等待指定PID的子进程
- -1:等待任意子进程
- 0:等待同一进程组的任意子进程
- <-1:等待指定进程组中的任意子进程
-
options常用WNOHANG(非阻塞)
5. 问题:进程间通信(IPC)有哪些方式?
考察点:IPC机制
回答示例:
Linux提供多种IPC机制:
- 管道(pipe):单向,父子进程间通信
int fd[2]; pipe(fd); - 命名管道(FIFO):可用于无亲缘关系进程
mkfifo myfifo - 消息队列(message queue):消息链表,支持多种数据类型
- 共享内存(shared memory):最快的方式,需要同步机制配合
shmget(), shmat(), shmdt() - 信号量(semaphore):用于同步
- 信号(signal):异步通知
- 套接字(socket):跨网络通信
6. 问题:进程状态有哪些?
考察点:进程状态转换
回答示例:
进程状态(ps命令的STAT列):
- R(Running):运行或可运行(在运行队列中)
- S(Sleeping):可中断的睡眠(等待事件完成)
- D(Disk Sleep):不可中断的睡眠(通常等待I/O,不能被信号唤醒)
- T(Stopped):停止状态(由SIGSTOP等信号停止)
- t(Tracing stop):跟踪停止(被调试器暂停)
- Z(Zombie):僵尸状态
- X(Dead):死亡状态(不会被看到)
- <:高优先级
- N:低优先级
- s:会话组长
- l:多线程
- +:前台进程组
7. 问题:什么是进程组和会话?
考察点:进程的组织方式
回答示例:
- 进程组:一个或多个进程的集合,每个进程组有一个进程组ID。进程组中的进程通常通过shell管道连接。
- 会话:一个或多个进程组的集合,每个会话有一个会话ID。一个会话通常对应一个终端(控制终端)。
相关概念:
- 前台进程组:可以接收终端输入的进程组
- 后台进程组:在后台运行的进程组
相关命令:
# 将进程放入后台进程组
command &
# 查看进程组和会话ID
ps -o pid,pgid,sid,comm
8. 问题:进程调度策略有哪些?
考察点:进程调度
回答示例:
Linux进程调度策略:
- SCHED_OTHER:默认的分时调度策略,使用CFS(完全公平调度器)
- SCHED_FIFO:实时先进先出调度,直到被更高优先级进程抢占或主动放弃CPU
- SCHED_RR:实时轮转调度,时间片轮转
- SCHED_BATCH:适用于批处理任务,降低交互性
- SCHED_IDLE:极低优先级,只在系统空闲时运行
- SCHED_DEADLINE:基于截止时间的调度
查看和设置:
# 查看进程调度策略
chrt -p PID
# 设置调度策略
chrt -f -p 10 PID # 设置FIFO,优先级10
9. 问题:如何查看进程打开的文件?
考察点:进程资源查看
回答示例:
-
lsof命令:
lsof -p PID # 查看指定进程打开的文件 lsof -c process_name # 查看指定程序打开的文件 lsof -i :80 # 查看打开80端口的进程 -
查看/proc文件系统:
ls -l /proc/PID/fd # 查看进程的文件描述符 cat /proc/PID/maps # 查看进程的内存映射 cat /proc/PID/status # 查看进程状态信息 -
fuser命令:
fuser /path/to/file # 查看使用文件的进程
10. 问题:进程的虚拟内存布局是怎样的?
考察点:进程内存管理
回答示例:
32位Linux进程典型的虚拟内存布局:
0xFFFFFFFF
内核空间
栈(向下增长)
共享库
堆(向上增长)
.bss(未初始化数据)
.data(已初始化数据)
.text(代码段)
0x08048000
0x00000000
64位系统布局类似,地址空间更大。
查看方法:
# 查看进程内存映射
cat /proc/self/maps
pmap PID
二、线程相关
11. 问题:线程和进程的区别?
考察点:线程概念,与进程对比
回答示例:
| 特性 | 进程 | 线程 |
|---|---|---|
| 资源分配 | 资源分配的基本单位 | CPU调度的基本单位 |
| 资源拥有 | 独立地址空间、文件描述符等 | 共享进程资源,有独立栈和寄存器 |
| 创建开销 | 大(需要复制资源) | 小(共享资源) |
| 通信 | 复杂(需要IPC) | 简单(共享内存) |
| 可靠性 | 一个进程崩溃不影响其他进程 | 一个线程崩溃可能导致整个进程崩溃 |
| 上下文切换 | 开销大(涉及地址空间切换) | 开销小(共享地址空间) |
12. 问题:什么是用户态线程和内核态线程?
考察点:线程实现模型
回答示例:
三种线程模型:
-
用户态线程(多对一模型)
- 由用户空间的线程库管理
- 内核不知道线程存在
- 优点:切换快,不涉及内核
- 缺点:一个线程阻塞会导致整个进程阻塞,不能利用多核
-
内核态线程(一对一模型)
- 由内核管理
- 每个用户线程对应一个内核线程
- 优点:可以利用多核,一个线程阻塞不影响其他线程
- 缺点:切换开销大,需要系统调用
- Linux使用此模型
-
混合模型(多对多模型)
- 用户线程映射到内核线程池
- 结合前两者的优点
13. 问题:多线程同步机制有哪些?
考察点:线程同步
回答示例:
-
互斥锁(mutex):
pthread_mutex_t mutex; pthread_mutex_lock(&mutex); // 临界区 pthread_mutex_unlock(&mutex); -
读写锁(rwlock):读共享,写互斥
pthread_rwlock_t rwlock; pthread_rwlock_rdlock(&rwlock); // 读锁 pthread_rwlock_wrlock(&rwlock); // 写锁 -
条件变量(condition variable):
pthread_cond_t cond; pthread_cond_wait(&cond, &mutex); pthread_cond_signal(&cond); -
自旋锁(spinlock):忙等待
-
屏障(barrier):等待多个线程到达
-
信号量(semaphore):
sem_t sem; sem_wait(&sem); sem_post(&sem);
14. 问题:什么是线程安全?如何实现?
考察点:线程安全概念
回答示例:
线程安全指多线程环境下,函数或代码段能被多个线程同时调用而不会产生错误。
实现线程安全的方法:
- 同步机制:使用互斥锁、读写锁等保护共享数据
- 线程局部存储(TLS):
__thread int counter; // GCC扩展 // 或使用pthread接口 pthread_key_t key; pthread_getspecific(key); - 避免共享:使用局部变量而非全局变量
- 原子操作:
__sync_fetch_and_add(&counter, 1); - 不可变对象:对象创建后不可修改
- 可重入函数:不依赖静态数据,不使用全局变量
15. 问题:死锁的条件和避免方法?
考察点:死锁
回答示例:
死锁的四个必要条件(Coffman条件):
- 互斥条件:资源一次只能被一个线程使用
- 持有并等待:线程持有资源并等待其他资源
- 非抢占条件:资源只能由持有线程释放
- 循环等待:多个线程形成资源等待环
避免方法:
-
预防:破坏四个条件之一
- 破坏互斥:使用共享资源(如只读资源)
- 破坏持有并等待:一次性申请所有资源(银行家算法)
- 破坏非抢占:允许抢占资源
- 破坏循环等待:资源有序申请
-
检测和恢复:定期检测死锁,强制终止进程
-
避免:运行时判断资源分配是否安全
-
忽略:如Unix/Linux通常忽略死锁
16. 问题:pthread_create的参数含义?
考察点:线程创建
回答示例:
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void *(*start_routine) (void *), void *arg);
参数说明:
- thread:指向线程标识符的指针,用于返回线程ID
- attr:线程属性,可指定栈大小、调度策略等,NULL为默认属性
- start_routine:线程函数指针,函数签名:
void* func(void* arg) - arg:传递给线程函数的参数
示例:
void* thread_func(void* arg) {
printf("Thread: %s\n", (char*)arg);
return NULL;
}
int main() {
pthread_t tid;
pthread_create(&tid, NULL, thread_func, "Hello");
pthread_join(tid, NULL);
return 0;
}
17. 问题:线程取消(cancellation)如何工作?
考察点:线程取消机制
回答示例:
线程取消允许一个线程请求终止另一个线程,涉及三个概念:
-
取消状态:
- PTHREAD_CANCEL_ENABLE(默认):可取消
- PTHREAD_CANCEL_DISABLE:不可取消
-
取消类型:
- PTHREAD_CANCEL_DEFERRED(默认):延迟取消,直到取消点
- PTHREAD_CANCEL_ASYNCHRONOUS:异步取消,立即取消
-
取消点:某些函数会检查取消请求,如sleep、read、write等
使用示例:
// 设置取消状态和类型
pthread_setcancelstate(PTHREAD_CANCEL_ENABLE, NULL);
pthread_setcanceltype(PTHREAD_CANCEL_DEFERRED, NULL);
// 注册清理函数
void cleanup(void *arg) {
printf("Cleanup: %s\n", (char*)arg);
}
// 在可能被取消的代码中使用
pthread_cleanup_push(cleanup, "resource");
// ... 临界区代码
pthread_cleanup_pop(1); // 执行清理函数
三、可执行文件相关
18. 问题:ELF文件格式了解吗?
考察点:可执行文件格式
回答示例:
ELF(Executable and Linkable Format)是Linux可执行文件、目标文件和共享库的标准格式。
ELF文件结构:
-
ELF头部:描述文件类型、目标架构、程序入口等
readelf -h program -
程序头表:描述段(segment)信息,用于加载可执行文件
readelf -l program -
节头表:描述节(section)信息,用于链接和调试
readelf -S program -
数据部分:
- .text:代码节
- .data:已初始化数据
- .bss:未初始化数据
- .rodata:只读数据
- .symtab:符号表
- .strtab:字符串表
-
段(Segments):程序头定义的加载单元
- LOAD段:可加载的代码和数据
- DYNAMIC段:动态链接信息
- INTERP段:指定程序解释器(如/lib64/ld-linux-x86-64.so.2)
19. 问题:静态链接和动态链接的区别?
考察点:链接方式
回答示例:
| 特性 | 静态链接 | 动态链接 |
|---|---|---|
| 链接时机 | 编译时 | 运行时 |
| 库代码位置 | 复制到可执行文件 | 在共享库中 |
| 文件大小 | 大 | 小 |
| 内存使用 | 每个进程独立副本 | 共享库代码 |
| 更新 | 需重新编译 | 替换库文件即可 |
| 启动速度 | 快 | 稍慢(需加载库) |
| 依赖 | 无外部依赖 | 依赖库存在且版本兼容 |
查看依赖:
# 查看动态链接依赖
ldd program
# 查看链接器
readelf -l program | grep interpreter
# 静态链接程序显示"not a dynamic executable"
ldd static_program
20. 问题:程序从源代码到执行的步骤?
考察点:编译链接过程
回答示例:
四个主要阶段:
-
预处理:处理宏定义、包含头文件等
gcc -E source.c -o source.i展开#include、处理#ifdef、展开宏等
-
编译:将预处理后的文件编译成汇编代码
gcc -S source.i -o source.s语法分析、语义分析、优化、生成汇编
-
汇编:将汇编代码转换为机器码
gcc -c source.s -o source.o生成可重定位目标文件
-
链接:将目标文件和库链接成可执行文件
gcc source.o -o program包括:
- 符号解析:将符号引用与定义关联
- 重定位:调整代码和数据的地址
- 处理静态库/动态库
-
加载执行:
- 操作系统创建进程
- 加载器加载程序到内存
- 动态链接器加载共享库
- 设置程序入口并开始执行
可以使用-v选项查看详细过程:
gcc -v source.c -o program
Linux进程、线程和可执行文件进阶面试题(20例)
一、进程管理进阶
1. 问题:什么是进程间通信的性能比较?如何选择IPC方式?
考察点:IPC机制的性能和适用场景
回答示例:
不同IPC方式的性能特点:
| IPC方式 | 性能 | 适用场景 | 优缺点 |
|---|---|---|---|
| 管道 | 中等 | 父子进程简单通信 | 简单,单向,容量有限 |
| 命名管道 | 中等 | 无亲缘关系进程 | 可跨进程,仍受缓冲区限制 |
| 共享内存 | 最快 | 大数据量频繁通信 | 需要同步机制,编程复杂 |
| 消息队列 | 较慢 | 结构化消息传递 | 消息有格式,支持优先级 |
| 信号量 | 快 | 同步控制 | 只能同步,不能传数据 |
| 信号 | 快 | 简单事件通知 | 数据量小,可能丢失 |
| 套接字 | 慢 | 网络或本地通信 | 最通用,开销最大 |
选择原则:
- 数据量小、简单通知:信号、信号量
- 父子进程通信:管道
- 大数据量、高性能:共享内存+信号量
- 结构化消息:消息队列
- 跨网络/复杂通信:套接字
2. 问题:Linux进程的实时性如何保证?
考察点:实时进程调度
回答示例:
Linux支持实时进程调度,保证关键任务的及时响应:
-
实时调度策略:
SCHED_FIFO:先进先出,直到主动放弃或被更高优先级抢占SCHED_RR:轮转调度,有时间片限制SCHED_DEADLINE:基于截止时间的调度(Linux 3.14+)
-
优先级范围:
- 实时优先级:1(最低)到99(最高)
- 普通优先级:静态优先级100-139(对应nice值-20到19)
-
设置方法:
struct sched_param param; param.sched_priority = 50; sched_setscheduler(pid, SCHED_FIFO, ¶m); -
限制:需要root权限或
CAP_SYS_NICE能力 -
注意事项:
- 实时进程可能导致系统饥饿
- 需要仔细设计以避免死锁
- 配合CPU亲和性使用效果更好
3. 问题:什么是cgroups?如何限制进程资源?
考察点:资源控制机制
回答示例:
cgroups(控制组)是Linux内核功能,用于限制、记录和隔离进程组的资源使用。
主要子系统:
- cpu:CPU时间分配
- cpuset:CPU和内存节点绑定
- memory:内存使用限制
- blkio:块设备I/O限制
- net_cls:网络流量控制
- devices:设备访问控制
使用示例:
# 创建cgroup
cgcreate -g cpu,memory:/mygroup
# 设置限制
echo 100000 > /sys/fs/cgroup/cpu/mygroup/cpu.cfs_quota_us # 限制10% CPU
echo 100M > /sys/fs/cgroup/memory/mygroup/memory.limit_in_bytes # 限制100MB内存
# 将进程加入cgroup
echo $PID > /sys/fs/cgroup/cpu/mygroup/tasks
echo $PID > /sys/fs/cgroup/memory/mygroup/tasks
# 使用systemd管理
systemctl set-property user.slice MemoryLimit=500M
4. 问题:进程的内存管理(malloc/free)如何工作?
考察点:内存分配机制
回答示例:
Linux进程内存分配通过malloc/free库函数管理:
-
内存分配层次:
- 应用层:malloc/free(C库)
- C库层:ptmalloc、jemalloc、tcmalloc等分配器
- 内核层:brk/sbrk、mmap系统调用
-
分配策略:
- 小块内存:通过brk扩展堆,使用空闲链表管理
- 大块内存(>128KB或可调):使用mmap匿名映射
- 线程局部缓存:减少锁竞争(tcmalloc特性)
-
内存碎片问题:
- 外部碎片:空闲内存不连续
- 内部碎片:分配单元未充分利用
- 解决方法:内存池、slab分配器
-
优化技巧:
- 使用内存池减少malloc/free调用
- 对齐内存访问提高性能
- 监控内存使用(valgrind, mtrace)
5. 问题:如何监控和分析进程性能?
考察点:性能分析工具
回答示例:
Linux提供多种进程性能监控工具:
-
基础监控:
top/htop # 实时监控 ps aux --sort=-%mem # 按内存排序 pidstat # 详细进程统计 -
CPU分析:
perf stat ./program # 性能计数器 perf record -g ./program # 采样分析 perf report # 查看报告 -
内存分析:
valgrind --tool=memcheck ./program # 内存错误检测 valgrind --tool=massif ./program # 堆分析 pmap -x $PID # 内存映射详情 -
I/O分析:
iotop # I/O使用情况 strace -e trace=file ./program # 跟踪文件操作 -
系统调用跟踪:
strace -c ./program # 系统调用统计 ltrace ./program # 库调用跟踪
二、线程编程进阶
6. 问题:线程安全的数据结构如何设计?
考察点:并发数据结构设计
回答示例:
设计线程安全数据结构的关键原则:
-
锁定策略:
- 细粒度锁:每个节点或区域独立锁,提高并发性
- 读写锁:读多写少的场景
- 无锁设计:使用原子操作,避免锁开销
-
示例:线程安全队列:
typedef struct { void **data; int capacity; int head, tail; pthread_mutex_t lock; pthread_cond_t not_empty; pthread_cond_t not_full; } ThreadSafeQueue; void queue_init(ThreadSafeQueue *q, int capacity) { q->data = malloc(sizeof(void*) * capacity); q->capacity = capacity; q->head = q->tail = 0; pthread_mutex_init(&q->lock, NULL); pthread_cond_init(&q->not_empty, NULL); pthread_cond_init(&q->not_full, NULL); } void queue_put(ThreadSafeQueue *q, void *item) { pthread_mutex_lock(&q->lock); while ((q->tail + 1) % q->capacity == q->head) { pthread_cond_wait(&q->not_full, &q->lock); } q->data[q->tail] = item; q->tail = (q->tail + 1) % q->capacity; pthread_cond_signal(&q->not_empty); pthread_mutex_unlock(&q->lock); } -
无锁队列示例(使用CAS):
typedef struct Node { void *data; struct Node *next; } Node; void lockfree_enqueue(Node **head, void *data) { Node *new_node = malloc(sizeof(Node)); new_node->data = data; Node *old_head; do { old_head = *head; new_node->next = old_head; } while (!__sync_bool_compare_and_swap(head, old_head, new_node)); }
7. 问题:什么是ABA问题?如何解决?
考察点:无锁编程的挑战
回答示例:
ABA问题是无锁编程中的经典问题:
-
问题描述:
- 线程1读取共享变量值为A
- 线程2将值改为B,然后又改回A
- 线程1的CAS操作成功(因为值还是A),但实际上数据已经发生了变化
-
场景示例:
初始状态:链表 A->B->C 线程1:读取head为A,准备将head改为B 线程2:弹出A,弹出B,压入A 现在链表:A->C 线程1:CAS比较head=A,成功改为B 结果:链表B->? (B已经被移除,导致问题) -
解决方案:
- 标签指针:使用指针+计数器的组合
typedef struct { void *ptr; uint64_t tag; } TaggedPointer; // CAS操作同时检查指针和标签 bool tagged_cas(TaggedPointer *addr, TaggedPointer *expected, TaggedPointer *desired) { return __sync_bool_compare_and_swap( (uint128_t*)addr, *(uint128_t*)expected, *(uint128_t*)desired); }- 垃圾收集:确保对象在使用期间不被回收
- RCU(Read-Copy-Update):Linux内核使用的技术
8. 问题:RCU(Read-Copy-Update)机制的原理?
考察点:Linux内核并发机制
回答示例:
RCU是Linux内核中的无锁同步机制,适用于读多写少的场景:
-
核心思想:
- 读者:不需要锁,直接访问数据
- 写者:创建副本,修改副本,原子替换指针,延迟释放旧数据
-
工作流程:
// 读者侧 rcu_read_lock(); data = rcu_dereference(global_ptr); // 使用data... rcu_read_unlock(); // 写者侧 new_data = kmalloc(sizeof(*new_data)); memcpy(new_data, old_data, sizeof(*old_data)); modify(new_data); rcu_assign_pointer(global_ptr, new_data); synchronize_rcu(); // 等待所有读者退出 kfree(old_data); -
关键特性:
- 读者无锁:性能极高
- 写者开销:复制和同步延迟
- 内存屏障:保证读写顺序
- 宽限期:确保所有读者完成
-
使用场景:
- 内核数据结构(链表、哈希表)
- 路由表更新
- 配置数据更新
9. 问题:什么是内存屏障(Memory Barrier)?为什么需要?
考察点:内存一致性问题
回答示例:
内存屏障是防止指令重排的屏障,确保内存操作的顺序性:
-
问题背景:
- 现代CPU/编译器会重排指令优化性能
- 多核系统中,缓存一致性可能导致问题
- 需要保证某些操作的顺序性
-
屏障类型:
- 编译器屏障:防止编译器重排
asm volatile("" ::: "memory"); - CPU内存屏障:
- 读屏障:保证屏障前的读操作先于屏障后的读操作完成
- 写屏障:保证屏障前的写操作先于屏障后的写操作完成
- 全屏障:读写都保证顺序
- 编译器屏障:防止编译器重排
-
使用场景:
// 无锁计数器更新 __sync_fetch_and_add(&counter, 1); // 实际上包含内存屏障 // 手动插入屏障 __sync_synchronize(); // 全屏障 // C11原子操作 atomic_thread_fence(memory_order_seq_cst); -
内存顺序模型(C11):
memory_order_relaxed:无顺序保证memory_order_acquire:获取语义,后续读操作不能重排到前面memory_order_release:释放语义,前面写操作不能重排到后面memory_order_seq_cst:顺序一致性,最强保证
10. 问题:如何实现一个线程池?
考察点:并发编程实践
回答示例:
线程池的完整实现需要考虑多个方面:
typedef struct {
void (*function)(void *);
void *argument;
} threadpool_task_t;
typedef struct {
pthread_mutex_t lock; // 互斥锁
pthread_cond_t notify; // 条件变量
pthread_t *threads; // 线程数组
threadpool_task_t *queue; // 任务队列
int thread_count; // 线程数
int queue_size; // 队列大小
int head; // 队列头
int tail; // 队列尾
int count; // 当前任务数
int shutdown; // 关闭标志
int started; // 运行线程数
} threadpool_t;
// 创建线程池
threadpool_t *threadpool_create(int thread_count, int queue_size) {
threadpool_t *pool = calloc(1, sizeof(threadpool_t));
pool->threads = malloc(sizeof(pthread_t) * thread_count);
pool->queue = malloc(sizeof(threadpool_task_t) * queue_size);
pthread_mutex_init(&pool->lock, NULL);
pthread_cond_init(&pool->notify, NULL);
for (int i = 0; i < thread_count; i++) {
pthread_create(&pool->threads[i], NULL,
threadpool_worker, pool);
pool->started++;
}
return pool;
}
// 工作线程函数
void *threadpool_worker(void *threadpool) {
threadpool_t *pool = threadpool;
while (1) {
pthread_mutex_lock(&pool->lock);
// 等待任务或关闭信号
while (pool->count == 0 && !pool->shutdown) {
pthread_cond_wait(&pool->notify, &pool->lock);
}
if (pool->shutdown) {
break;
}
// 取出任务
threadpool_task_t task = pool->queue[pool->head];
pool->head = (pool->head + 1) % pool->queue_size;
pool->count--;
pthread_mutex_unlock(&pool->lock);
// 执行任务
task.function(task.argument);
}
pthread_mutex_unlock(&pool->lock);
pthread_exit(NULL);
}
三、可执行文件与调试
11. 问题:ELF文件的动态链接过程是怎样的?
考察点:动态链接细节
回答示例:
动态链接的详细过程:
-
程序加载时:
/lib64/ld-linux-x86-64.so.2 ./program -
动态链接器工作流程:
- 读取程序的
.interp段找到动态链接器路径 - 加载动态链接器自身
- 动态链接器读取程序的
.dynamic段获取依赖信息 - 递归加载所有依赖库(广度优先)
- 符号解析和重定位
- 执行初始化函数(
.init、.init_array) - 跳转到程序入口点(
_start)
- 读取程序的
-
延迟绑定(PLT/GOT):
# PLT条目 func@plt: jmp *GOT[n] # 第一次跳转到绑定函数 push n # 重定位索引 jmp .plt # 调用绑定例程 # 第一次调用后,GOT被填充为实际函数地址 -
查看动态链接信息:
readelf -d program # 查看动态段 objdump -d -j .plt program # 查看PLT objdump -s -j .got program # 查看GOT
12. 问题:如何实现热更新(hot reload)?
考察点:运行时模块加载
回答示例:
热更新允许程序在不重启的情况下更新模块:
-
基于动态库的热更新:
void *handle = dlopen("./module.so", RTLD_NOW); void (*func)() = dlsym(handle, "function"); // 使用函数 func(); // 热更新:关闭旧库,加载新库 dlclose(handle); handle = dlopen("./module_new.so", RTLD_NOW); -
注意事项:
- 保持ABI兼容性
- 管理全局状态迁移
- 处理未完成的调用
- 清理资源(避免泄漏)
-
完整示例:
typedef struct { void *handle; time_t mtime; void (*update)(void); } HotModule; void check_and_reload(HotModule *mod, const char *path) { struct stat st; stat(path, &st); if (st.st_mtime > mod->mtime) { // 有更新,重新加载 if (mod->handle) dlclose(mod->handle); mod->handle = dlopen(path, RTLD_NOW); mod->update = dlsym(mod->handle, "update"); mod->mtime = st.st_mtime; printf("Module reloaded\n"); } }
13. 问题:什么是地址空间布局随机化(ASLR)?
考察点:安全机制
回答示例:
ASLR是安全技术,随机化内存地址布局,增加攻击难度:
-
随机化的内容:
- 栈地址
- 堆地址
- 库基地址
- 可执行文件基地址(PIE时)
-
控制ASLR:
# 查看ASLR状态 cat /proc/sys/kernel/randomize_va_space # 0: 关闭 1: 部分随机 2: 完全随机 # 临时修改 echo 2 > /proc/sys/kernel/randomize_va_space # 关闭ASLR运行程序 setarch $(uname -m) -R ./program -
与PIE的关系:
- PIE(位置无关可执行文件)使程序本身可被随机加载
- 没有PIE,只有栈、堆、库被随机化
-
检查PIE:
readelf -h program | grep Type # DYN:PIE或共享库 # EXEC:非PIE可执行文件 checksec --file=program # 检查安全特性
14. 问题:如何使用ptrace调试器工作原理?
考察点:调试器实现原理
回答示例:
ptrace是进程跟踪的系统调用,调试器的基础:
-
基本操作:
// 附加到进程 ptrace(PTRACE_ATTACH, pid, NULL, NULL); // 单步执行 ptrace(PTRACE_SINGLESTEP, pid, NULL, NULL); // 读写内存 long data = ptrace(PTRACE_PEEKDATA, pid, addr, NULL); ptrace(PTRACE_POKEDATA, pid, addr, data); // 读写寄存器 struct user_regs_struct regs; ptrace(PTRACE_GETREGS, pid, NULL, ®s); regs.rip += 2; // 跳过当前指令 ptrace(PTRACE_SETREGS, pid, NULL, ®s); -
实现断点:
// 设置断点(INT3指令) long orig = ptrace(PTRACE_PEEKDATA, pid, addr, NULL); ptrace(PTRACE_POKEDATA, pid, addr, (orig & ~0xFF) | 0xCC); // 等待断点触发 waitpid(pid, &status, 0); // 恢复执行 ptrace(PTRACE_POKEDATA, pid, addr, orig); // 恢复指令 regs.rip = addr; // 设置回正确地址 ptrace(PTRACE_SETREGS, pid, NULL, ®s); ptrace(PTRACE_SINGLESTEP, pid, NULL, NULL); // 单步执行 -
完整调试器框架:
void debug_loop(pid_t pid) { int status; while (1) { ptrace(PTRACE_SYSCALL, pid, NULL, NULL); waitpid(pid, &status, 0); if (WIFEXITED(status)) break; // 获取系统调用信息 struct user_regs_struct regs; ptrace(PTRACE_GETREGS, pid, NULL, ®s); // 处理系统调用 handle_syscall(pid, ®s); } }
15. 问题:什么是Core Dump?如何分析?
考察点:崩溃分析
回答示例:
Core Dump是程序崩溃时的内存转储,用于事后分析:
-
启用Core Dump:
ulimit -c unlimited # 设置core文件大小 echo "/tmp/core.%e.%p" > /proc/sys/kernel/core_pattern # 设置路径 sysctl -w kernel.core_pattern=/tmp/core.%e.%p.%t # 永久设置 -
分析Core Dump:
# 基本分析 gdb ./program core.pid bt # 查看调用栈 info reg # 查看寄存器 info threads # 查看线程 # 自动化分析 gdb -ex "thread apply all bt full" -ex "quit" ./program core # 使用coredumpctl(systemd系统) coredumpctl list coredumpctl gdb PID -
增强调试信息:
# 编译时添加调试信息 gcc -g -O0 -rdynamic program.c -o program # -rdynamic:导出所有符号 # -g:包含调试信息 # -O0:禁用优化 # 分离调试信息 objcopy --only-keep-debug program program.debug strip -g program # 从可执行文件移除调试信息 objcopy --add-gnu-debuglink=program.debug program
四、性能与优化
16. 问题:如何优化多线程程序的性能?
考察点:并发性能优化
回答示例:
多线程性能优化的关键点:
-
减少锁竞争:
// 坏例子:全局锁 pthread_mutex_t global_lock; // 好例子:细粒度锁 typedef struct { pthread_mutex_t lock; int count; } Counter; Counter counters[NUM_CPUS]; // 每个CPU一个计数器 -
优化数据局部性:
// 伪共享问题:两个变量在同一缓存行 struct { int a; // 线程1频繁访问 int b; // 线程2频繁访问 } shared; // 导致缓存行无效化 // 解决方案:缓存行对齐 struct { int a; char padding[CACHE_LINE_SIZE - sizeof(int)]; } thread1_data; -
使用原子操作:
// 使用原子操作替代锁 __sync_fetch_and_add(&counter, 1); // C11标准 atomic_fetch_add(&counter, 1); -
线程池参数调优:
// 最佳线程数 ≈ CPU核心数 × (1 + 等待时间/计算时间) int optimal_threads = sysconf(_SC_NPROCESSORS_ONLN) * (1 + io_wait_ratio);
17. 问题:CPU缓存对程序性能的影响?
考察点:缓存意识编程
回答示例:
CPU缓存层次结构(L1、L2、L3)对性能有重大影响:
-
缓存友好代码:
// 坏例子:跳跃访问 for (int i = 0; i < N; i++) { for (int j = 0; j < N; j++) { sum += matrix[j][i]; // 按列访问,缓存不友好 } } // 好例子:顺序访问 for (int i = 0; i < N; i++) { for (int j = 0; j < N; j++) { sum += matrix[i][j]; // 按行访问,缓存友好 } } -
缓存行大小:
# 查看缓存信息 getconf -a | grep CACHE cat /sys/devices/system/cpu/cpu0/cache/index0/coherency_line_size # 通常是64字节 -
预取优化:
// 手动预取 __builtin_prefetch(&array[i + 16]); // 循环展开帮助预取 for (int i = 0; i < N; i += 4) { sum += array[i]; sum += array[i+1]; sum += array[i+2]; sum += array[i+3]; } -
工具分析:
perf stat -e cache-references,cache-misses ./program valgrind --tool=cachegrind ./program
18. 问题:如何检测和解决内存泄漏?
考察点:内存问题调试
回答示例:
内存泄漏检测的完整方案:
-
使用Valgrind:
valgrind --leak-check=full --show-leak-kinds=all \ --track-origins=yes ./program -
AddressSanitizer(ASan):
gcc -fsanitize=address -g program.c -o program ./program # 自动检测内存错误 # 额外选项 -fsanitize=leak # 只检测泄漏 -fsanitize=address,leak # 全部检测 -
自定义内存跟踪:
#define TRACK_MEMORY #ifdef TRACK_MEMORY #define malloc(size) tracked_malloc(size, __FILE__, __LINE__) #define free(ptr) tracked_free(ptr, __FILE__, __LINE__) typedef struct { void *ptr; size_t size; const char *file; int line; } Allocation; void *tracked_malloc(size_t size, const char *file, int line) { void *ptr = real_malloc(size + sizeof(Allocation)); Allocation *info = ptr; info->ptr = ptr + sizeof(Allocation); info->size = size; info->file = file; info->line = line; add_allocation(info); return info->ptr; } #endif -
监控工具:
# 监控进程内存 top -p PID pmap -x PID # 查看/proc信息 cat /proc/PID/status | grep -i vm cat /proc/PID/smaps # 详细内存映射
19. 问题:什么是NUMA?对多线程程序的影响?
考察点:非统一内存访问架构
回答示例:
NUMA(Non-Uniform Memory Access)架构中,内存访问时间取决于内存位置:
-
NUMA结构:
Node0 (CPU0-7) Node1 (CPU8-15) 内存控制器0 内存控制器1 本地内存快 本地内存快 远程内存慢 远程内存慢 -
NUMA感知编程:
// 设置内存分配策略 #include <numa.h> numa_set_preferred(0); // 优先使用Node0内存 numa_alloc_onnode(size, 0); // 在Node0分配内存 // 绑定线程到NUMA节点 numa_run_on_node(0); -
查看NUMA信息:
numactl --hardware # 查看NUMA拓扑 numactl --show # 查看当前策略 numastat # 查看NUMA统计 # 控制程序运行 numactl --cpunodebind=0 --membind=0 ./program -
优化策略:
- 线程绑定到CPU核心
- 内存分配在本地节点
- 减少跨节点访问
- 使用numa_alloc_local自动分配
20. 问题:如何设计高性能服务器程序?
考察点:系统编程综合能力
回答示例:
高性能服务器设计的关键要素:
-
架构选择:
- 多进程:Apache(预派生)、稳定性高
- 多线程:Nginx(事件驱动+线程池)、资源共享好
- 异步I/O:Redis(单线程事件循环)、上下文切换少
-
I/O模型优化:
// 使用epoll处理大量连接 int epoll_fd = epoll_create1(0); struct epoll_event event; event.events = EPOLLIN | EPOLLET; // 边缘触发 event.data.fd = sockfd; epoll_ctl(epoll_fd, EPOLL_CTL_ADD, sockfd, &event); while (1) { int n = epoll_wait(epoll_fd, events, MAX_EVENTS, -1); for (int i = 0; i < n; i++) { if (events[i].events & EPOLLIN) { handle_connection(events[i].data.fd); } } } -
性能优化点:
- 零拷贝:sendfile、splice、mmap
- 连接复用:HTTP keep-alive、数据库连接池
- 负载均衡:多进程监听同一端口(SO_REUSEPORT)
- 内存管理:使用内存池、避免频繁分配
-
完整服务器框架:
typedef struct { int listen_fd; int epoll_fd; ThreadPool *thread_pool; ConnectionPool *conn_pool; } Server; void server_init(Server *s, int port) { s->listen_fd = create_listen_socket(port); s->epoll_fd = epoll_create1(0); s->thread_pool = threadpool_create(num_cpus() * 2, 1000); s->conn_pool = connpool_create(MAX_CONNECTIONS); // 设置非阻塞 fcntl(s->listen_fd, F_SETFL, fcntl(s->listen_fd, F_GETFL) | O_NONBLOCK); // 添加到epoll struct epoll_event ev; ev.events = EPOLLIN | EPOLLET; ev.data.fd = s->listen_fd; epoll_ctl(s->epoll_fd, EPOLL_CTL_ADD, s->listen_fd, &ev); }
Linux进程、线程和可执行文件深度面试题(20例)
一、进程与系统调用
1. 问题:系统调用和普通函数调用的区别?
考察点:用户态与内核态切换
回答示例:
系统调用是用户程序请求操作系统内核服务的接口,与普通函数调用的主要区别:
-
执行模式:
- 系统调用:从用户态切换到内核态
- 函数调用:始终在用户态执行
-
实现位置:
- 系统调用:由内核实现
- 函数调用:由用户空间库实现
-
调用机制:
// 系统调用:通过软中断(如x86的int 0x80或syscall) mov eax, 1 ; 系统调用号 int 0x80 ; 触发软中断 // 函数调用:直接跳转 call function -
性能开销:
- 系统调用:较大(上下文切换、权限检查)
- 函数调用:较小(栈帧切换)
-
错误处理:
// 系统调用通常返回-1表示错误,errno存储错误码 int fd = open("file.txt", O_RDONLY); if (fd == -1) { perror("open failed"); }
2. 问题:clone()系统调用与fork()的区别?
考察点:进程创建机制
回答示例:
clone()是Linux创建进程/线程的底层系统调用,fork()和pthread_create()都基于它实现:
-
参数对比:
// fork()的简单实现 pid_t fork(void) { return clone(SIGCHLD, 0, 0, 0, 0); } // clone()更灵活 int clone(int (*fn)(void *), void *stack, int flags, void *arg, ...); -
关键标志位:
CLONE_VM:共享地址空间(创建线程)CLONE_FS:共享文件系统信息CLONE_FILES:共享文件描述符表CLONE_SIGHAND:共享信号处理程序CLONE_THREAD:在同一个线程组中
-
创建线程:
// 类似pthread_create的实现 int create_thread(void (*start_routine)(void *), void *arg) { void *stack = malloc(STACK_SIZE); return clone(start_routine, stack + STACK_SIZE, CLONE_VM | CLONE_FS | CLONE_FILES | CLONE_SIGHAND | CLONE_THREAD, arg); }
3. 问题:进程的退出方式有哪些区别?
考察点:进程终止机制
回答示例:
进程退出的几种方式及其区别:
-
正常退出:
// 从main返回 return 0; // 调用exit() exit(0); // 清理后退出 // 调用_exit()/_Exit() _exit(0); // 立即退出,不清理 -
异常退出:
- 收到终止信号(SIGTERM, SIGKILL等)
- 程序错误(段错误、除零等)
-
清理操作:
exit()会执行以下清理:// 1. 调用atexit()注册的函数(逆序) // 2. 刷新stdio缓冲区 // 3. 关闭所有打开的文件描述符 // 4. 删除tmpfile()创建的文件 // 5. 调用_exit()_exit()直接终止,不执行上述清理
-
线程退出:
pthread_exit(retval); // 线程退出
4. 问题:进程描述符(task_struct)包含哪些重要信息?
考察点:内核进程管理
回答示例:
task_struct是Linux内核中表示进程的数据结构,包含:
-
标识信息:
pid_t pid; // 进程ID pid_t tgid; // 线程组ID(主线程PID) struct task_struct *parent; // 父进程 -
状态信息:
volatile long state; // 进程状态 int exit_state; // 退出状态 int exit_code; // 退出码 -
调度信息:
int prio; // 动态优先级 int static_prio; // 静态优先级 struct sched_class *sched_class; // 调度类 -
内存管理:
struct mm_struct *mm; // 内存描述符 struct vm_area_struct *mmap; // 内存区域 -
文件系统:
struct fs_struct *fs; // 文件系统信息 struct files_struct *files; // 打开文件表 -
信号处理:
struct signal_struct *signal; // 信号处理 sigset_t blocked; // 阻塞的信号 -
统计信息:
u64 utime, stime; // 用户/内核CPU时间 unsigned long nvcsw, nivcsw; // 上下文切换次数
5. 问题:什么是进程的审计(audit)?如何实现?
考察点:进程监控
回答示例:
进程审计用于记录和监控进程的系统调用和文件访问:
-
Linux Audit子系统:
# 安装审计工具 apt-get install auditd audispd-plugins # 查看审计规则 auditctl -l # 监控特定文件的访问 auditctl -w /etc/passwd -p war -k password_file # 监控特定系统调用 auditctl -a always,exit -S open -S openat -F auid>=1000 -
使用ptrace实现简单审计:
void trace_process(pid_t pid) { int status; ptrace(PTRACE_ATTACH, pid, NULL, NULL); waitpid(pid, &status, 0); while (1) { ptrace(PTRACE_SYSCALL, pid, NULL, NULL); waitpid(pid, &status, 0); if (WIFEXITED(status)) break; // 获取系统调用信息 struct user_regs_struct regs; ptrace(PTRACE_GETREGS, pid, NULL, ®s); long syscall = regs.orig_rax; printf("Syscall: %ld\n", syscall); } ptrace(PTRACE_DETACH, pid, NULL, NULL); }
二、线程与并发深度
6. 问题:什么是线程的竞争条件(Race Condition)?如何发现?
考察点:并发问题检测
回答示例:
竞争条件指多个线程访问共享资源且最终结果取决于执行时序:
-
典型例子:
// 竞态条件示例 int counter = 0; void *increment(void *arg) { for (int i = 0; i < 1000000; i++) { counter++; // 非原子操作 } return NULL; } -
检测工具:
-
ThreadSanitizer:
gcc -fsanitize=thread -g program.c -o program ./program # 自动检测数据竞争 -
Helgrind(Valgrind工具):
valgrind --tool=helgrind ./program -
Lockdep(内核锁依赖检测)
-
-
常见竞争模式:
- 丢失更新(read-modify-write)
- 检查后使用(check-then-act)
- 不变量被破坏
7. 问题:什么是内存顺序(Memory Order)问题?示例说明
考察点:内存模型理解
回答示例:
现代CPU为了性能会重排内存操作顺序,可能导致多线程问题:
-
典型问题(指令重排):
// 线程1 data = 42; ready = 1; // 可能被重排到data=42之前 // 线程2 while (!ready); printf("%d\n", data); // 可能看到0而不是42 -
内存屏障解决:
// 使用C11原子操作 atomic_int data = ATOMIC_VAR_INIT(0); atomic_int ready = ATOMIC_VAR_INIT(0); // 线程1 atomic_store_explicit(&data, 42, memory_order_relaxed); atomic_store_explicit(&ready, 1, memory_order_release); // 线程2 while (atomic_load_explicit(&ready, memory_order_acquire) == 0); printf("%d\n", atomic_load_explicit(&data, memory_order_relaxed)); -
内存顺序类型:
typedef enum { memory_order_relaxed, // 无顺序保证 memory_order_consume, // 依赖顺序 memory_order_acquire, // 获取语义 memory_order_release, // 释放语义 memory_order_acq_rel, // 获取-释放 memory_order_seq_cst // 顺序一致性 } memory_order;
8. 问题:什么是线程的优先级反转(Priority Inversion)?如何解决?
考察点:实时系统问题
回答示例:
优先级反转指高优先级线程被低优先级线程阻塞的现象:
-
经典场景:
- 高优先级线程H需要资源R
- 中优先级线程M不需要R但占用CPU
- 低优先级线程L持有R的锁
- 结果:H被M阻塞,虽然M优先级较低
-
解决方案:
-
优先级继承:低优先级线程继承等待它的高优先级线程的优先级
// pthread支持优先级继承 pthread_mutexattr_t attr; pthread_mutexattr_init(&attr); pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_INHERIT); pthread_mutex_init(&mutex, &attr); -
优先级天花板:为互斥锁设置优先级上限
pthread_mutexattr_setprotocol(&attr, PTHREAD_PRIO_PROTECT); pthread_mutexattr_setprioceiling(&attr, prio_ceiling); -
禁用中断/调度:关键区禁止抢占
-
9. 问题:如何实现一个读写锁?
考察点:同步原语实现
回答示例:
读写锁允许多个读或单个写,实现需要考虑公平性和性能:
typedef struct {
pthread_mutex_t lock; // 保护内部状态
pthread_cond_t read_cond; // 读条件变量
pthread_cond_t write_cond; // 写条件变量
int readers; // 当前读者数
int writers; // 等待写者数
int writing; // 是否有写者
} rwlock_t;
void rwlock_init(rwlock_t *rw) {
pthread_mutex_init(&rw->lock, NULL);
pthread_cond_init(&rw->read_cond, NULL);
pthread_cond_init(&rw->write_cond, NULL);
rw->readers = rw->writers = rw->writing = 0;
}
void rwlock_rdlock(rwlock_t *rw) {
pthread_mutex_lock(&rw->lock);
while (rw->writers > 0 || rw->writing) {
pthread_cond_wait(&rw->read_cond, &rw->lock);
}
rw->readers++;
pthread_mutex_unlock(&rw->lock);
}
void rwlock_wrlock(rwlock_t *rw) {
pthread_mutex_lock(&rw->lock);
rw->writers++;
while (rw->readers > 0 || rw->writing) {
pthread_cond_wait(&rw->write_cond, &rw->lock);
}
rw->writers--;
rw->writing = 1;
pthread_mutex_unlock(&rw->lock);
}
void rwlock_unlock(rwlock_t *rw) {
pthread_mutex_lock(&rw->lock);
if (rw->writing) {
rw->writing = 0;
// 优先唤醒写者
if (rw->writers > 0) {
pthread_cond_signal(&rw->write_cond);
} else {
pthread_cond_broadcast(&rw->read_cond);
}
} else {
rw->readers--;
if (rw->readers == 0 && rw->writers > 0) {
pthread_cond_signal(&rw->write_cond);
}
}
pthread_mutex_unlock(&rw->lock);
}
10. 问题:什么是纤程(Fiber)?与线程的区别?
考察点:用户态线程
回答示例:
纤程是用户态管理的轻量级线程,由应用程序调度:
-
主要区别:
特性 线程 纤程 调度者 操作系统 应用程序 上下文切换 内核态 用户态 栈大小 较大(MB级) 较小(KB级) 创建开销 较大 很小 阻塞影响 阻塞整个线程 可手动切换 -
实现示例:
typedef struct { void *stack; void *context; void (*func)(void*); void *arg; } fiber_t; void fiber_create(fiber_t *fiber, void (*func)(void*), void *arg) { fiber->stack = malloc(STACK_SIZE); fiber->func = func; fiber->arg = arg; // 设置上下文(使用makecontext/getcontext/setcontext) getcontext(&fiber->context); fiber->context.uc_stack.ss_sp = fiber->stack; fiber->context.uc_stack.ss_size = STACK_SIZE; makecontext(&fiber->context, (void(*)())fiber->func, 1, fiber->arg); } void fiber_yield(fiber_t *from, fiber_t *to) { swapcontext(&from->context, &to->context); }
三、可执行文件与安全
11. 问题:什么是Return-Oriented Programming(ROP)攻击?如何防御?
考察点:二进制安全
回答示例:
ROP是利用已有代码片段(gadget)进行攻击的技术:
-
攻击原理:
- 控制栈指针,执行代码片段链
- 每个片段以ret结尾,形成执行链
-
防御措施:
-
栈保护:
gcc -fstack-protector-strong program.c # 栈保护 gcc -z noexecstack program.c # 栈不可执行 -
地址随机化:
# 启用ASLR echo 2 > /proc/sys/kernel/randomize_va_space -
控制流完整性:
gcc -fcf-protection=full program.c # CET支持 -
ROP检测工具:
# 使用ROPgadget检查 ROPgadget --binary program # 使用radare2 r2 -c "/R pop" program
-
12. 问题:二进制加固技术有哪些?
考察点:程序保护
回答示例:
二进制加固保护程序免受逆向和攻击:
-
编译时加固:
# 综合加固选项 gcc -fPIE -pie -fstack-protector-strong -D_FORTIFY_SOURCE=2 \ -Wl,-z,now -Wl,-z,relro -Wl,-z,noexecstack program.c -
代码混淆:
- 控制流平坦化
- 指令替换
- 虚假代码插入
-
反调试技术:
// 检测ptrace if (ptrace(PTRACE_TRACEME, 0, NULL, 0) == -1) { // 正在被调试 exit(1); } // 检测/proc/self/status FILE *f = fopen("/proc/self/status", "r"); // 检查TracerPid字段 -
加壳技术:
- UPX:压缩壳
- Themida:商用保护壳
- VMProtect:虚拟化保护
13. 问题:如何实现二进制补丁(hotpatch)?
考察点:运行时修改
回答示例:
二进制补丁允许在运行时修改程序行为:
-
函数hook示例:
void hook_function() { unsigned char patch[] = { 0x48, 0xB8, 0xEF, 0xBE, 0xAD, 0xDE, // mov rax, 0xDEADBEEF 0xFF, 0xE0 // jmp rax }; // 修改内存权限 mprotect(ALIGN_DOWN(target, PAGE_SIZE), PAGE_SIZE, PROT_READ | PROT_WRITE | PROT_EXEC); // 写入跳转指令 memcpy(target, patch, sizeof(patch)); // 恢复权限 mprotect(ALIGN_DOWN(target, PAGE_SIZE), PAGE_SIZE, PROT_READ | PROT_EXEC); } -
使用LD_PRELOAD:
// 拦截malloc void *malloc(size_t size) { static void *(*real_malloc)(size_t) = NULL; if (!real_malloc) { real_malloc = dlsym(RTLD_NEXT, "malloc"); } void *ptr = real_malloc(size); // 记录分配信息 return ptr; }
14. 问题:ELF文件的节(section)和段(segment)的区别?
考察点:可执行文件格式细节
回答示例:
节和段是ELF文件的不同组织方式:
-
节(section):
- 链接视图:用于链接和调试
- 由节头表描述
- 包含.text、.data、.bss、.symtab等
-
段(segment):
- 执行视图:用于加载和执行
- 由程序头表描述
- 包含LOAD、DYNAMIC、INTERP等
-
转换关系:
节 → 段 .text + .rodata → LOAD段(可读可执行) .data + .bss → LOAD段(可读可写) .dynamic → DYNAMIC段 .interp → INTERP段 -
查看工具:
# 查看节信息 readelf -S program objdump -h program # 查看段信息 readelf -l program objdump -p program
15. 问题:如何解析ELF文件获取符号信息?
考察点:二进制分析
回答示例:
解析ELF文件获取函数、变量等符号信息:
#include <elf.h>
#include <stdio.h>
void parse_symbols(const char *filename) {
FILE *f = fopen(filename, "rb");
Elf64_Ehdr ehdr;
fread(&ehdr, sizeof(ehdr), 1, f);
// 读取节头表
fseek(f, ehdr.e_shoff, SEEK_SET);
Elf64_Shdr *shdr = malloc(ehdr.e_shentsize * ehdr.e_shnum);
fread(shdr, ehdr.e_shentsize, ehdr.e_shnum, f);
// 查找符号表
Elf64_Shdr *symtab_shdr = NULL;
Elf64_Shdr *strtab_shdr = NULL;
for (int i = 0; i < ehdr.e_shnum; i++) {
if (shdr[i].sh_type == SHT_SYMTAB) {
symtab_shdr = &shdr[i];
strtab_shdr = &shdr[symtab_shdr->sh_link];
break;
}
}
if (symtab_shdr) {
// 读取字符串表
char *strtab = malloc(strtab_shdr->sh_size);
fseek(f, strtab_shdr->sh_offset, SEEK_SET);
fread(strtab, 1, strtab_shdr->sh_size, f);
// 读取符号表
int num_symbols = symtab_shdr->sh_size / sizeof(Elf64_Sym);
Elf64_Sym *symbols = malloc(symtab_shdr->sh_size);
fseek(f, symtab_shdr->sh_offset, SEEK_SET);
fread(symbols, sizeof(Elf64_Sym), num_symbols, f);
// 打印符号
for (int i = 0; i < num_symbols; i++) {
const char *name = strtab + symbols[i].st_name;
printf("Symbol: %s (value: 0x%lx)\n", name, symbols[i].st_value);
}
}
free(shdr);
fclose(f);
}
四、性能优化与调试
16. 问题:如何使用perf进行性能分析?
考察点:性能分析工具
回答示例:
perf是Linux性能分析工具,支持硬件计数器和采样:
-
基本使用:
# 统计程序运行信息 perf stat ./program # 采样分析 perf record -g ./program perf report # 实时分析 perf top -
分析特定事件:
# 查看可用事件 perf list # 分析缓存命中率 perf stat -e cache-references,cache-misses ./program # 分析分支预测 perf stat -e branches,branch-misses ./program -
火焰图生成:
# 采样数据 perf record -F 99 -g --call-graph dwarf ./program perf script > out.perf # 生成火焰图 stackcollapse-perf.pl out.perf > out.folded flamegraph.pl out.folded > flamegraph.svg
17. 问题:什么是静态分析和动态分析?工具举例
考察点:代码分析技术
回答示例:
静态分析和动态分析是两种代码分析方法:
-
静态分析:
- 分析源代码或二进制,不执行程序
- 工具:
# 语法检查 gcc -Wall -Wextra -pedantic program.c # 静态分析工具 clang --analyze program.c cppcheck program.c splint program.c # 二进制分析 objdump -d program radare2 -A program
-
动态分析:
- 运行时分析程序行为
- 工具:
# 内存检测 valgrind --tool=memcheck ./program # 性能分析 valgrind --tool=callgrind ./program kcachegrind callgrind.out.* # 覆盖率分析 gcc -fprofile-arcs -ftest-coverage program.c ./program gcov program.c
18. 问题:如何调试多线程程序?
考察点:并发调试
回答示例:
调试多线程程序需要特殊工具和技术:
-
GDB多线程调试:
gdb ./program (gdb) break main (gdb) run # 线程相关命令 (gdb) info threads # 查看所有线程 (gdb) thread 2 # 切换到线程2 (gdb) thread apply all bt # 所有线程的调用栈 (gdb) set scheduler-locking on # 锁定当前线程 -
死锁检测:
# 使用valgrind的drd工具 valgrind --tool=drd ./program # 使用helgrind valgrind --tool=helgrind ./program -
日志调试:
#define THREAD_DEBUG #ifdef THREAD_DEBUG #define LOG(fmt, ...) \ fprintf(stderr, "[%lu] " fmt "\n", \ (unsigned long)pthread_self(), ##__VA_ARGS__) #else #define LOG(fmt, ...) #endif
19. 问题:如何实现跨平台的可执行文件格式?
考察点:可移植性设计
回答示例:
跨平台可执行文件需要考虑不同系统的ABI差异:
-
设计思路:
- 自定义格式,包含多个平台代码
- 使用解释器或虚拟机
- 动态选择加载合适版本
-
示例实现:
// 自定义文件头 typedef struct { char magic[4]; // 魔数 uint32_t num_sections; // 节数量 uint32_t entry_offset; // 入口偏移 } CustomHeader; // 平台特定代码节 typedef struct { uint32_t platform; // 平台标识 uint32_t offset; // 代码偏移 uint32_t size; // 代码大小 } PlatformSection; // 运行时检测并加载 void *load_executable(const char *path) { int fd = open(path, O_RDONLY); CustomHeader header; read(fd, &header, sizeof(header)); // 读取平台列表 PlatformSection *sections = malloc(header.num_sections * sizeof(PlatformSection)); read(fd, sections, header.num_sections * sizeof(PlatformSection)); // 查找当前平台 uint32_t current_platform = detect_platform(); for (int i = 0; i < header.num_sections; i++) { if (sections[i].platform == current_platform) { // 加载对应代码 lseek(fd, sections[i].offset, SEEK_SET); void *code = mmap(NULL, sections[i].size, PROT_READ | PROT_EXEC, MAP_PRIVATE, fd, sections[i].offset); return code; } } return NULL; }
20. 问题:如何设计一个进程监控和恢复系统?
考察点:系统设计能力
回答示例:
进程监控系统确保关键服务持续运行:
typedef struct {
pid_t pid;
char *command;
time_t start_time;
int restart_count;
int max_restarts;
} MonitoredProcess;
typedef struct {
MonitoredProcess *processes;
int num_processes;
int check_interval;
} ProcessMonitor;
void monitor_init(ProcessMonitor *monitor) {
// 从配置文件读取监控列表
monitor->processes = load_config("monitor.conf");
monitor->check_interval = 5;
}
void check_processes(ProcessMonitor *monitor) {
for (int i = 0; i < monitor->num_processes; i++) {
MonitoredProcess *proc = &monitor->processes[i];
// 检查进程是否存在
if (kill(proc->pid, 0) == -1 && errno == ESRCH) {
// 进程死亡,尝试重启
restart_process(proc);
}
}
}
void restart_process(MonitoredProcess *proc) {
if (proc->restart_count >= proc->max_restarts) {
log_error("Process %s exceeded max restarts", proc->command);
return;
}
// 启动新进程
pid_t pid = fork();
if (pid == 0) {
// 子进程
char *argv[] = {proc->command, NULL};
execvp(proc->command, argv);
exit(1);
} else if (pid > 0) {
// 父进程
proc->pid = pid;
proc->start_time = time(NULL);
proc->restart_count++;
log_info("Restarted %s (PID: %d)", proc->command, pid);
}
}
// 监控主循环
void monitor_loop(ProcessMonitor *monitor) {
while (1) {
check_processes(monitor);
sleep(monitor->check_interval);
}
}
内容由ai生成
3. sizeof 和 strlen 的区别
这是 C/C++ 中的基础但重要的问题。
sizeof:- 本质:是一个运算符(operator),在编译时就计算完毕。
- 作用:计算数据类型或变量所占用的内存字节数。
- 参数:可以是数据类型(如
sizeof(int)),也可以是变量、数组名等。 - 对字符串:
sizeof(字符数组)返回整个数组的大小(包括结尾的\0)。对于指针,sizeof(字符指针)返回指针本身的大小(如4或8字节)。
strlen:- 本质:是一个库函数,在运行时调用。
- 作用:计算字符串的长度,即从给定地址开始,直到遇到第一个
\0结束符为止的字符个数,不包括\0。 - 参数:必须是
const char*(指向以\0结尾的字符串)。 - 对字符串:只关心字符串内容,不关心数组总大小。
核心区别:sizeof 是内存大小,strlen 是字符串长度。对于一个 char str[100] = “hello”;,sizeof(str) 是100,而 strlen(str) 是5。
4. strlen 传入非字符类型(如 int*)会发生什么?
这是一种未定义行为。
- 类型不匹配:
strlen的函数原型是size_t strlen(const char *str);,它期望参数指向一个字符数组。 - 危险行为:当传入
int*或其他类型的指针时,函数会“忠实地”将该地址后的内存当作字符数组来解读,并逐个字节地查找\0。 - 后果:
- 可能因为访问到不可读的内存区域而导致程序崩溃(段错误)。
- 可能因为内存中恰好有一个字节为0而“幸运地”返回一个无意义的值。
- 这是危险的编程错误,编译器可能会给出警告,但不会阻止。
6. int 长度,long 长度
这是与平台和编译器相关的问题。
- C/C++ 标准只规定了最小长度,而非绝对长度。
int:至少16位(2字节)。在现代主流平台(Windows/Linux 64位)上,通常是 32位(4字节)。long:至少32位(4字节)。其长度随数据模型(Data Model)变化:- LP64(Unix/Linux/macOS 64位):
long是 64位(8字节)。 - LLP64(Windows 64位):
long保持 32位(4字节),long long才是64位。
- LP64(Unix/Linux/macOS 64位):
- 最佳实践:如果需要确定长度的整数,请使用
<cstdint>中的int32_t,int64_t等。
8. push_back 和 emplace_back
两者都用于向 vector 末尾添加一个元素。
push_back(const T& value)或push_back(T&& value):- 接受一个已经构造好的对象(左值或右值)。
- 在
vector末尾,这个对象会被拷贝构造或移动构造。 - 例如:
vec.push_back(MyClass(a, b));会先构造一个临时MyClass对象,再将其移动(或拷贝)到容器中。
emplace_back(Args&&... args):- 接受一组构造参数。
- 利用完美转发,直接在
vector末尾的内存位置上,使用这些参数原地构造对象。 - 例如:
vec.emplace_back(a, b);会直接在容器内调用MyClass(a, b)构造函数,避免了临时对象的创建和拷贝/移动操作。
- 优势:对于非平凡类型,
emplace_back通常比push_back更高效,尤其是在添加右值或构造参数复杂时。对于基础类型(如int),两者性能无差。
9. 头文件如何避免重复导入
两种主要方法:
-
宏保护(
#ifndef/#define/#endif) - 最通用、最标准的方法。// MyClass.h #ifndef MYCLASS_H // 如果没有定义这个宏 #define MYCLASS_H // 则定义它,并编译下面的内容 // ... 头文件的实际内容 ... #endif // MYCLASS_H首次包含时,宏未定义,内容被编译。后续再包含时,宏已定义,编译器会跳过整个文件内容。
-
#pragma once- 非标准但被广泛支持的编译器指令。// MyClass.h #pragma once // ... 头文件的实际内容 ...编译器会保证这个物理文件只被编译一次。写法更简洁,且有时编译器能提供更快的编译速度。但其依赖于编译器支持(现代主流编译器都支持)。
建议:在项目中可以任选一种,保持风格统一。#pragma once 更现代方便,但 #ifndef 的移植性略好。
10. GCC 调试的方法
- 编译时添加调试信息:使用
-g选项编译程序,这是调试的基础。gcc -g -o program program.c - 启动GDB:使用 GDB 调试生成的可执行文件。
gdb ./program - 常用 GDB 命令:
run或r:运行程序。break或b:设置断点(如b main,b 10,b func)。next或n:单步执行(不进入函数)。step或s:单步执行(进入函数)。print或p:打印变量值(如p variable)。continue或c:继续运行直到下一个断点。backtrace或bt:查看函数调用栈。quit或q:退出 GDB。
11. GCC 调试如何传入参数
在 GDB 中有两种主要方式:
- 在
run命令后直接加参数:(gdb) run arg1 arg2 “arg3 with space” - 在启动 GDB 时使用
--args选项:
然后直接gdb --args ./program arg1 arg2 “arg3 with space”run即可。
12. 快排
快速排序是一种基于分治思想的高效排序算法,平均/期望时间复杂度为 O(n log n),最坏情况(如已排序数组)为 O(n²)。可以通过随机化选择基准来避免最坏情况。
核心步骤:
- 选择基准:从数组中选取一个元素作为“基准”。
- 分区:重新排列数组,将所有小于基准的元素移到其左侧,所有大于基准的元素移到其右侧。分区完成后,基准就位于其最终的正确位置。
- 递归:递归地对基准左侧和右侧的子数组进行快速排序。
C++ 简易实现(Lomuto 分区):
int partition(vector<int>& arr, int low, int high) {
int pivot = arr[high]; // 选择最后一个元素为基准
int i = low; // 较小元素的索引
for (int j = low; j < high; j++) {
if (arr[j] < pivot) {
swap(arr[i], arr[j]);
i++;
}
}
swap(arr[i], arr[high]); // 将基准放到正确位置
return i;
}
void quickSort(vector<int>& arr, int low, int high) {
if (low < high) {
int pi = partition(arr, low, high);
quickSort(arr, low, pi - 1);
quickSort(arr, pi + 1, high);
}
}
13. TCP 中的滑动窗口
滑动窗口是 TCP 实现流量控制和可靠传输的核心机制。
- 目的:
- 流量控制:接收方通过声明自己的“接收窗口大小”,告知发送方自己还有多少缓冲区可用,从而控制发送方的发送速率,防止接收方被淹没。
- 提高效率(管道化):允许发送方在收到确认前,连续发送多个数据段,充分利用网络带宽。
- 工作原理:
- 窗口定义了发送方在未收到确认的情况下,可以连续发送的数据范围。
- 窗口由两部分组成:已发送未确认 和 可发送但未发送。
- 每当收到一个确认 ACK,窗口就向前“滑动”,新的数据段可以进入窗口并被发送。
- 接收方通过 ACK 报文中的 窗口大小字段 动态调整发送方的窗口大小。
- 与拥塞控制的关系:实际的发送窗口大小取 接收方通告窗口 和 拥塞控制窗口 的较小值,同时受两者制约。
14. 网络编程中的 epoll, poll, select
它们都是 I/O 多路复用技术,用于一个线程同时监控多个文件描述符(如 Socket)的可读/可写状态。
| 特性 | select |
poll |
epoll (Linux) |
|---|---|---|---|
| 效率 | 每次调用都需将整个 fd_set 从用户态拷贝到内核态,并线性扫描所有 fd。 | 同 select,但数据结构不同。 |
内核维护一个事件表,通过 epoll_ctl 注册/修改,epoll_wait 只返回就绪事件,效率高。 |
| 最大 fd 数 | 受 FD_SETSIZE 限制(通常1024)。 |
无硬性限制(基于链表)。 | 无硬性限制,与系统内存相关。 |
| 工作模式 | 仅水平触发(LT)。 | 仅水平触发(LT)。 | 支持水平触发(LT)和边缘触发(ET)。ET模式效率更高,但需要一次性处理完所有数据。 |
| 接口复杂性 | 较复杂,使用 fd_set 宏。 | 较简单,使用 pollfd 结构体。 |
接口清晰(create, ctl, wait)。 |
| 适用场景 | 跨平台,fd数量少。 | fd数量较多,但跨平台。 | Linux 下高性能网络服务器的首选,连接数多且活跃比例不高时优势巨大。 |
总结演变:select/poll 在每次调用时都要传递整个监视列表给内核,是 O(n) 的。epoll 通过内核事件表,实现了 O(1) 的事件通知,大大提升了性能。
16. 字典树,B树,B+树
- 字典树:
- 结构:一种树形结构,用于存储字符串集合。每个节点代表一个字符,从根到某个节点的路径构成一个字符串。通常用一个标记来表示是否为一个单词的结尾。
- 特点:公共前缀共享存储,查找效率与字符串长度有关,与集合大小无关。常用于前缀匹配、词频统计、自动补全。
- B树:
- 结构:一种多路平衡查找树,每个节点可以包含多个关键字和多个子树指针。所有叶子节点位于同一层。
- 特点:设计用于磁盘等外存设备。通过减少树的高度(多路)来减少磁盘 I/O 次数。B树中,所有节点都存储数据。
- 用途:数据库文件系统、文件索引。
- B+树:
- 结构:B树的变种。与 B树 的主要区别:
- 非叶子节点仅存储键,用于索引,不存储数据记录。
- 所有数据记录都存储在叶子节点中,并且叶子节点之间通过指针连接成一个有序链表。
- 优势:
- 非叶子节点更“瘦”,能容纳更多键,树更矮,I/O 更少。
- 范围查询效率极高,只需在叶子链表上遍历。
- 所有查询都要走到叶子节点,性能稳定。
- 用途:现代关系型数据库(如 MySQL InnoDB)索引的标准实现。
- 结构:B树的变种。与 B树 的主要区别:
核心联系:B树和B+树都是为减少磁盘访问而设计的平衡多路树。B+树在范围查询和稳定性上优于B树,是数据库索引的事实标准。字典树则是专为字符串检索设计的特殊数据结构。
5. 从C++代码到一个可执行文件,会经历什么过程
四个主要阶段:
-
预处理 (Preprocessing)
- 处理
#include指令:将头文件内容插入源文件 - 宏展开:替换所有
#define定义的宏 - 条件编译:处理
#ifdef、#ifndef等 - 删除注释
- 生成
.i文件(预处理后的源文件)
- 处理
-
编译 (Compilation)
- 词法分析:将源代码分解为token流(标识符、关键字、运算符等)
- 语法分析:构建抽象语法树(AST)
- 语义分析:类型检查、声明检查
- 中间代码生成:转换为中间表示(如LLVM IR)
- 代码优化:进行各种优化(常量传播、死代码消除等)
- 目标代码生成:生成汇编代码(
.s文件)
-
汇编 (Assembly)
- 将汇编代码转换为机器指令
- 生成目标文件(
.o或.obj文件) - 包含代码段、数据段、符号表、重定位信息
-
链接 (Linking)
- 符号解析:找到每个符号(函数、变量)的地址
- 地址重定位:将相对地址转换为绝对地址
- 合并目标文件:将多个
.o文件合并 - 库链接:链接静态库或动态库
- 生成最终的可执行文件
详细流程图示:
main.cpp → 预处理 → main.i → 编译 → main.s → 汇编 → main.o
other.cpp → 预处理 → other.i → 编译 → other.s → 汇编 → other.o
↓
链接器 (ld)
↓
可执行文件 (a.out)
面试脚本示例:
“从C++源代码到可执行文件要经过四个关键阶段。首先是预处理,处理宏和头文件展开;然后是编译,进行词法语法分析并生成汇编代码;接着是汇编,将汇编代码变成机器码的目标文件;最后是链接,把多个目标文件和库文件合并,解决符号引用,生成最终的可执行文件。理解这个过程对调试和性能优化很有帮助。”
6. define和const的区别(详细补充)
| 维度 | #define |
const |
|---|---|---|
| 处理阶段 | 预处理阶段(文本替换) | 编译阶段 |
| 类型检查 | 无类型检查,只是文本替换 | 有严格的类型检查 |
| 作用域 | 无作用域,从定义处到文件末尾 | 有作用域(函数、类、文件作用域) |
| 内存分配 | 不分配内存,只是文本替换 | 分配内存(可能在只读数据段) |
| 调试 | 无法调试,预处理后已消失 | 可以调试,有符号信息 |
| 数组大小 | 可以用于定义数组大小 | C++中可以用const定义数组大小 |
| 函数参数 | 可以定义带参数的宏 | 不能用作函数参数的默认值 |
| 安全检查 | 可能产生副作用(如#define max(a,b) ((a)>(b)?(a):(b))) |
安全,无副作用 |
宏的陷阱示例:
#define SQUARE(x) x * x
int result = SQUARE(3 + 2); // 展开为 3 + 2 * 3 + 2 = 11,不是25
// 正确写法
#define SQUARE(x) ((x) * (x))
// const的优越性
constexpr int SIZE = 100;
int arr[SIZE]; // C++中合法
面试脚本补充:
“
#define是在预处理阶段做简单的文本替换,没有类型检查,作用域不受控制。而const是编译期常量,有类型安全,有明确作用域。现代C++更推荐使用const、constexpr或enum来代替宏,因为它们更安全、可调试。比如定义数组大小,C++中可以用const int,而不需要宏。”
7. 指针和引用有什么区别(深入版)
内存层面的区别:
int x = 10;
int* ptr = &x; // ptr是独立变量,有自己的内存地址
int& ref = x; // ref是x的别名,不占用额外存储(编译器实现层面)
// 查看地址
cout << &ptr; // 合法:指针本身的地址
cout << &ref; // 得到的是x的地址,不是引用的地址
// 汇编层面对比
// 指针:需要加载指针值,再间接寻址
// mov rax, [ptr] ; 获取指针值
// mov eax, [rax] ; 获取实际值
// 引用:通常直接操作原变量
// mov eax, [x] ; 直接获取值
使用场景:
-
用指针:
- 可能需要
nullptr表示空值 - 需要改变指向的对象
- 需要数组或动态内存操作
- 需要多级间接寻址
- 可能需要
-
用引用:
- 函数参数传递(避免拷贝,保证非空)
- 函数返回值(支持链式调用)
- 操作符重载
- 实现拷贝赋值运算符
面试脚本补充:
“从底层看,引用通常由编译器实现为’自动解引用的指针’,但不占用独立存储。指针更灵活但更危险,引用更安全但受限制。实际编程中,函数参数优先用const引用,需要修改参数时用指针或非const引用,需要表示’可选’时用指针(可传nullptr)。C++11的移动语义进一步扩展了引用的概念。”
8. New和Malloc有什么区别(内存管理深度)
内存布局对比:
// new分配的内存(典型实现)
// [头部信息] [对象内存] [对齐填充]
// 头部信息:大小、类型信息等
// malloc分配的内存(glibc实现)
// [块大小] [用户数据] [对齐填充]
// 构造/析构时机
class MyClass {
public:
MyClass() { cout << "构造\n"; }
~MyClass() { cout << "析构\n"; }
};
void* mem = malloc(sizeof(MyClass)); // 只分配内存
MyClass* obj = new(mem) MyClass(); // placement new,手动构造
obj->~MyClass(); // 手动析构
free(mem);
异常安全对比:
// new:强异常安全保证
try {
int* p = new int[10000000000ULL]; // 可能抛出std::bad_alloc
} catch (const std::bad_alloc& e) {
// 处理异常,没有内存泄漏
}
// malloc:需要手动检查
int* p = (int*)malloc(10000000000ULL * sizeof(int));
if (p == nullptr) {
// 处理分配失败
}
面试脚本补充:
“除了调用构造析构,new和malloc在异常处理、内存对齐、分配策略上都有区别。new失败抛异常,符合C++异常安全原则;malloc失败返回NULL。new自动计算大小和对齐,malloc需要手动计算。在自定义内存池时,可以重载operator new,但不能重载malloc。C++17后还有对齐的new版本,如
new(std::align_val_t(64)) MyClass。”
9. 对智能指针的了解(实现原理)
控制块(Control Block)结构:
// 简化版控制块实现
template<typename T>
struct ControlBlock {
std::atomic<size_t> shared_count; // 共享引用计数
std::atomic<size_t> weak_count; // 弱引用计数
T* ptr; // 管理的指针
Deleter deleter; // 删除器
// 当shared_count为0时调用
void destroy() {
if (ptr) {
deleter(ptr);
ptr = nullptr;
}
}
// 当shared_count和weak_count都为0时调用
void deallocate() {
delete this; // 释放控制块本身
}
};
make_shared的优势:
// 传统方式:两次内存分配
auto sp1 = std::shared_ptr<MyClass>(new MyClass());
// 1. 分配MyClass对象
// 2. 分配控制块
// make_shared:一次内存分配
auto sp2 = std::make_shared<MyClass>();
// 分配单块内存:控制块 + 对象
// 优点:更好的缓存局部性,更少的内存碎片
自定义删除器:
// 管理文件指针
std::shared_ptr<FILE> filePtr(fopen("test.txt", "r"),
[](FILE* fp) { if(fp) fclose(fp); });
// 管理数组
std::shared_ptr<int[]> arr(new int[10],
std::default_delete<int[]>());
// 管理特殊资源
struct ExternalResource {
void release(); // 特殊释放函数
};
std::shared_ptr<ExternalResource> res(
new ExternalResource(),
[](ExternalResource* p) { p->release(); delete p; }
);
面试脚本补充:
“智能指针的核心是RAII和引用计数。shared_ptr的控制块包含强引用和弱引用计数,以及删除器。make_shared将对象和控制块分配在连续内存,提高性能。智能指针支持自定义删除器,可以管理各种资源(文件、网络连接等)。C++20还引入了std::make_shared_for_overwrite用于默认初始化。”
10. Weakptr的实现的了解,他是怎么解决循环引用的
weak_ptr实现细节:
template<typename T>
class weak_ptr {
private:
T* ptr; // 指向对象的指针
ControlBlock* control_block; // 指向控制块
public:
// lock()实现
shared_ptr<T> lock() const noexcept {
if (control_block && control_block->shared_count > 0) {
// 增加强引用计数
control_block->shared_count.fetch_add(1, std::memory_order_relaxed);
return shared_ptr<T>(*this);
}
return shared_ptr<T>(); // 返回空shared_ptr
}
// 弱引用计数管理
~weak_ptr() {
if (control_block) {
control_block->weak_count.fetch_sub(1, std::memory_order_release);
if (control_block->shared_count == 0 &&
control_block->weak_count == 0) {
delete control_block; // 释放控制块
}
}
}
};
循环引用示例与解决:
// 循环引用问题
struct Node {
std::shared_ptr<Node> next;
// std::shared_ptr<Node> prev; // 双向链表,循环引用!
~Node() { cout << "Node destroyed\n"; }
};
// 使用weak_ptr解决
struct SafeNode {
std::shared_ptr<SafeNode> next;
std::weak_ptr<SafeNode> prev; // 弱引用,打破循环
void setPrev(std::shared_ptr<SafeNode> p) {
prev = p; // weak_ptr赋值不增加强引用计数
}
std::shared_ptr<SafeNode> getPrev() {
return prev.lock(); // 尝试获取shared_ptr
}
};
// 使用场景
auto node1 = std::make_shared<SafeNode>();
auto node2 = std::make_shared<SafeNode>();
node1->next = node2;
node2->setPrev(node1); // 弱引用,不会增加计数
weak_ptr使用模式:
- 观察者模式:观察者持有weak_ptr,避免影响对象生命周期
- 缓存:缓存持有weak_ptr,内存紧张时可被回收
- 父-子关系:子对象持有父对象的weak_ptr
面试脚本补充:
“weak_ptr的核心是不增加强引用计数。当对象被销毁后,weak_ptr的lock()返回空shared_ptr,避免了悬空指针。控制块的生命周期由强弱引用计数共同决定,只有两者都为0时才释放。在观察者模式中,观察者用weak_ptr引用主体,即使观察者忘记取消注册,也不会阻止主体被销毁。”
11. 讲一下你知道的类型转换(C++17/20更新)
C++类型转换全家桶:
// 1. C风格转换 - 不推荐
(T)expression; // 功能强大但不安全
// 2. static_cast - 常规转换
int i = 42;
double d = static_cast<double>(i); // 数值转换
Base* b = static_cast<Base*>(derived); // 向上转换
Derived* d = static_cast<Derived*>(base); // 向下转换(不安全!)
// 3. dynamic_cast - 安全向下转换
Derived* d = dynamic_cast<Derived*>(base);
if (d) { /* 转换成功 */ } // 失败返回nullptr
// 4. const_cast - 修改常量性
const int* cp = &i;
int* p = const_cast<int*>(cp); // 移除const
// 5. reinterpret_cast - 低层重新解释
int* ip = &i;
uintptr_t addr = reinterpret_cast<uintptr_t>(ip);
// 6. C++17: std::bit_cast (C++20) - 安全的位转换
float f = 3.14f;
auto bits = std::bit_cast<uint32_t>(f); // 类型安全的位复制
// 7. C++17: std::any_cast - 任意类型转换
std::any a = 42;
try {
int i = std::any_cast<int>(a);
} catch (const std::bad_any_cast& e) {
// 类型不匹配
}
类型特征检查(C++11/14/17):
#include <type_traits>
// 编译时类型检查
static_assert(std::is_convertible_v<int, double>); // 可转换
static_assert(std::is_polymorphic_v<Base>); // 多态类型
// 安全转换函数
template<typename To, typename From>
std::optional<To> safe_cast(From from) {
if constexpr (std::is_convertible_v<From, To>) {
return static_cast<To>(from);
} else {
return std::nullopt;
}
}
面试脚本补充:
“现代C++提供了丰富的类型转换工具。static_cast用于明确的相关类型转换;dynamic_cast用于安全的运行时类型转换;const_cast专门处理常量性;reinterpret_cast用于底层位操作。C++17/20引入了bit_cast用于安全的位表示转换,以及concepts进一步增强了类型约束。好的代码应该避免C风格转换,使用合适的C++转换操作符。”
12. 动态转换是怎么判断这个类型能不能转换为派生类的
RTTI(运行时类型信息)机制:
// 每个多态类型的type_info
class Base {
public:
virtual ~Base() = default; // 必须有虚函数才有RTTI
};
// type_info结构(简化)
struct __type_info {
const char* name; // 类型名
size_t hash_code; // 哈希值
bool (*__is_pointer_p)(const __type_info*); // 是否指针类型
bool (*__is_function_p)(const __type_info*); // 是否函数类型
bool (*__do_catch)(const __type_info* thrown, void**); // 异常捕获
bool (*__do_upcast)(const __type_info* target, void** obj); // 向上转换检查
};
// dynamic_cast实现原理(简化版)
template<typename To, typename From>
To* dynamic_cast_impl(From* from) {
if (from == nullptr) return nullptr;
// 获取type_info
const std::type_info& from_ti = typeid(*from);
const std::type_info& to_ti = typeid(To);
// 检查转换可行性
void* adjusted_ptr = nullptr;
if (from_ti.__do_upcast(&to_ti, &adjusted_ptr)) {
return static_cast<To*>(adjusted_ptr);
}
return nullptr; // 转换失败
}
多重继承下的dynamic_cast:
class Base1 { virtual void f1() {} };
class Base2 { virtual void f2() {} };
class Derived : public Base1, public Base2 {};
Base1* b1 = new Derived();
Base2* b2 = dynamic_cast<Base2*>(b1); // 需要调整指针偏移
// 调整过程:
// 1. 获取Derived的完整对象地址
// 2. 计算Base2在Derived中的偏移
// 3. 返回调整后的指针
typeid操作符:
Base* bp = new Derived();
const std::type_info& ti = typeid(*bp);
cout << ti.name() << endl; // 可能输出"class Derived"
// typeid的注意事项
Base* bp2 = nullptr;
// cout << typeid(*bp2).name(); // 未定义行为!
面试脚本补充:
“dynamic_cast依赖于RTTI机制。每个多态类都有一个type_info对象,存储类型信息。dynamic_cast运行时查询这个信息,通过虚函数表的特定条目找到完整对象地址,然后检查目标类型是否在继承层次中。对于多重继承,还需要调整指针偏移。typeid可以获取运行时类型信息,但对空指针解引用是未定义行为。”
13. 多态具体表现在哪里(实际应用)
设计模式中的多态应用:
// 1. 策略模式
class PaymentStrategy {
public:
virtual void pay(double amount) = 0;
virtual ~PaymentStrategy() = default;
};
class CreditCardPayment : public PaymentStrategy {
void pay(double amount) override { /* 信用卡支付 */ }
};
class PayPalPayment : public PaymentStrategy {
void pay(double amount) override { /* PayPal支付 */ }
};
class ShoppingCart {
std::unique_ptr<PaymentStrategy> strategy;
public:
void setStrategy(std::unique_ptr<PaymentStrategy> s) {
strategy = std::move(s);
}
void checkout(double total) {
strategy->pay(total); // 多态调用
}
};
// 2. 工厂模式
class Product {
public:
virtual void use() = 0;
};
class ConcreteProductA : public Product { void use() override {} };
class ConcreteProductB : public Product { void use() override {} };
Product* Factory::create(const std::string& type) {
if (type == "A") return new ConcreteProductA();
if (type == "B") return new ConcreteProductB();
return nullptr;
}
// 3. 访问者模式
class Visitor {
public:
virtual void visit(ConcreteElementA*) = 0;
virtual void visit(ConcreteElementB*) = 0;
};
class Element {
public:
virtual void accept(Visitor& v) = 0;
};
现代C++多态技术:
// 1. 类型擦除(std::function, std::any)
std::function<void()> func = []{ cout << "Lambda\n"; };
func(); // 多态调用
// 2. CRTP(编译期多态)
template<typename Derived>
class BaseCRTP {
public:
void interface() {
static_cast<Derived*>(this)->implementation();
}
};
class DerivedCRTP : public BaseCRTP<DerivedCRTP> {
void implementation() { /* 具体实现 */ }
};
// 3. Variant/Visitor(C++17)
std::variant<int, double, std::string> v = "hello";
std::visit([](auto&& arg) {
using T = std::decay_t<decltype(arg)>;
if constexpr (std::is_same_v<T, int>) {}
else if constexpr (std::is_same_v<T, double>) {}
else if constexpr (std::is_same_v<T, std::string>) {}
}, v);
面试脚本补充:
“多态在实际开发中无处不在。策略模式让算法可互换;工厂模式创建对象不依赖具体类;访问者模式实现双分派。现代C++还提供了更多多态方式:std::function实现类型擦除,CRTP实现编译期多态,variant+visit实现可辨识联合。多态的核心价值是提高代码的扩展性和可维护性,通过抽象接口降低模块间耦合。”
14. 对虚函数的了解(性能优化)
虚函数性能优化技巧:
// 1. final关键字优化
class Base {
public:
virtual void foo() { /* 默认实现 */ }
};
class Derived final : public Base { // final类,不可被继承
void foo() override final { /* 最终实现 */ } // final虚函数
};
// 编译器可以为final类/函数的虚调用去虚拟化
// 2. 虚函数表布局优化
class OptimizedBase {
private:
virtual void internal_foo() = 0; // 私有虚函数
public:
void foo() { internal_foo(); } // 非虚公有接口
// 模板方法模式
void templateMethod() {
prepare(); // 非虚
internal_foo(); // 虚调用
cleanup(); // 非虚
}
private:
void prepare() { /* 通用准备 */ }
void cleanup() { /* 通用清理 */ }
};
// 3. 使用CRTP避免虚函数
template<typename Derived>
class ShapeCRTP {
public:
double area() const {
return static_cast<const Derived*>(this)->area_impl();
}
};
class Circle : public ShapeCRTP<Circle> {
double radius;
public:
double area_impl() const { return 3.14 * radius * radius; }
};
// 编译期绑定,无虚函数开销
虚函数与缓存局部性:
// 虚函数调用导致缓存失效
std::vector<Base*> objects; // 指针分散,缓存不友好
for (auto obj : objects) {
obj->draw(); // 每次虚调用可能缓存缺失
}
// 优化:按类型分组
std::vector<Circle> circles;
std::vector<Square> squares;
// 连续内存,缓存友好
面试脚本补充:
“虚函数的开销主要来自:间接调用、无法内联、缓存不友好。优化方法包括:使用final让编译器去虚拟化;减少虚函数数量(用非虚接口模式);按类型分组对象改善缓存局部性;考虑CRTP实现编译期多态。在性能关键路径上,需要权衡多态的灵活性和性能开销。”
15. 纯虚函数有什么好处(接口设计)
接口设计原则:
// 1. 单一职责接口
class Drawable { // 只负责绘制
public:
virtual void draw() const = 0;
virtual ~Drawable() = default;
};
class Updatable { // 只负责更新
public:
virtual void update(float dt) = 0;
virtual ~Updatable() = default;
};
class GameObject : public Drawable, public Updatable {
// 实现两个接口
};
// 2. 接口隔离原则
class IReader {
public:
virtual std::string read() = 0;
virtual ~IReader() = default;
};
class IWriter {
public:
virtual void write(const std::string&) = 0;
virtual ~IWriter() = default;
};
// 不需要同时实现读写的类只需继承需要的接口
// 3. 非虚接口模式(NVI)
class Interface {
public:
// 非虚公有函数
void operation() {
// 前置条件检查
if (!validate()) throw std::logic_error("Invalid");
// 调用私有虚函数
do_operation();
// 后置条件检查
post_operation();
}
virtual ~Interface() = default;
private:
virtual void do_operation() = 0; // 纯虚函数
bool validate() { return true; } // 可被子类重写
void post_operation() {} // 可被子类重写
};
纯虚析构函数:
class AbstractBase {
public:
virtual ~AbstractBase() = 0; // 纯虚析构函数
};
// 必须提供定义!
AbstractBase::~AbstractBase() = default;
class Derived : public AbstractBase {
~Derived() override = default;
};
面试脚本补充:
“纯虚函数强制接口与实现分离,支持多重继承,实现接口隔离原则。非虚接口模式(NVI)用非虚函数包裹虚函数,可以在调用前后添加通用逻辑。纯虚析构函数使类成为抽象类,但必须提供定义,因为派生类析构时会调用它。好的接口设计应该小而专注,易于测试和模拟。”
16. 对纯虚接口类的了解(现代C++)
概念约束(C++20):
// C++20前:纯虚接口
class Container {
public:
virtual size_t size() const = 0;
virtual bool empty() const { return size() == 0; }
virtual ~Container() = default;
};
// C++20:概念约束
template<typename T>
concept ContainerConcept = requires(T t) {
{ t.size() } -> std::convertible_to<size_t>;
{ t.empty() } -> std::convertible_to<bool>;
};
template<ContainerConcept C>
void process(C& container) {
// 编译期检查,无运行时开销
}
// 类型安全的接口
class SafeContainer {
public:
virtual std::optional<Data> get(int id) const = 0;
virtual std::expected<void, Error> insert(Data) = 0;
};
CRTP接口:
template<typename Derived>
class Cloneable {
public:
Derived* clone() const {
return new Derived(static_cast<const Derived&>(*this));
}
};
class MyClass : public Cloneable<MyClass> {
// 自动获得clone()实现
};
// 编译期接口检查
template<typename T, typename = void>
struct has_clone : std::false_type {};
template<typename T>
struct has_clone<T, std::void_t<decltype(std::declval<T>().clone())>>
: std::true_type {};
面试脚本补充:
“纯虚接口类是现代C++组件设计的基础。C++20引入concepts后,可以在编译期检查接口实现。好的接口应该小而专注,使用现代类型(如optional、expected)表达可能失败的操作。CRTP可以在编译期提供接口实现,避免虚函数开销。接口设计要考虑可测试性,便于模拟和桩测试。”
17. 使用这种类的过程有没有什么需要注意的地方
常见陷阱与解决方案:
// 1. 切片问题
class Base { /* 有虚函数 */ };
class Derived : public Base { /* 额外数据 */ };
Derived d;
Base b = d; // 切片!Derived部分被切掉
// 解决:使用指针/引用
Base& ref = d; // 正确,保持多态
Base* ptr = &d; // 正确
// 2. 析构函数非虚
class BaseNoVirtual {
public:
~BaseNoVirtual() { cout << "Base dtor\n"; } // 非虚!
};
class DerivedNV : public BaseNoVirtual {
int* data;
public:
DerivedNV() : data(new int[100]) {}
~DerivedNV() { delete[] data; cout << "Derived dtor\n"; }
};
BaseNoVirtual* p = new DerivedNV();
delete p; // 只调用Base析构,内存泄漏!
// 3. 多继承的二义性
class A { public: void foo() {} };
class B { public: void foo() {} };
class C : public A, public B {};
C c;
// c.foo(); // 错误:二义性
c.A::foo(); // 明确指定
// 4. 异常安全
class ResourceHolder {
std::unique_ptr<Resource> res;
public:
virtual void setup() { // 虚函数可能抛异常
res = std::make_unique<Resource>();
// 如果派生类的setup抛异常,基类部分已构造
}
// 解决方法:非虚接口模式
void init() {
res = std::make_unique<Resource>();
do_setup(); // 派生类实现
}
virtual void do_setup() = 0;
};
接口版本控制:
// 接口版本化管理
class IInterfaceV1 {
public:
virtual void method1() = 0;
virtual ~IInterfaceV1() = default;
};
class IInterfaceV2 : public IInterfaceV1 {
public:
virtual void method2() = 0;
// 不破坏现有代码
};
// 使用pimpl模式隐藏实现
class MyClass {
class Impl;
std::unique_ptr<Impl> pimpl;
public:
MyClass();
~MyClass(); // 需要定义,因为Impl是不完整类型
MyClass(MyClass&&); // 移动构造
MyClass& operator=(MyClass&&); // 移动赋值
};
面试脚本补充:
“使用纯虚接口类要注意:1) 析构函数必须虚;2) 避免对象切片,用指针/引用;3) 多继承时注意二义性;4) 考虑异常安全,用NVI模式;5) 接口设计要考虑版本兼容性;6) 使用pimpl隐藏实现细节。还要注意二进制兼容性,避免在接口中添加非虚函数或修改虚函数顺序。”
这是一个非常全面的技术面试问题列表,覆盖了操作系统、网络、C++和Qt等核心领域。我将为你逐一进行详细解答,并提供精炼的面试回答脚本。
一、 线程同步/线程安全 & 操作系统
6. 进程间的同步方式,用过哪些?
回答要点:
- 信号量:最经典的IPC同步机制,可用于控制多个进程对共享资源的访问。
- 管道/匿名管道:单向通信,用于有亲缘关系(父子进程)的进程间通信。
- 命名管道:允许无亲缘关系的进程通过文件系统路径名进行通信。
- 消息队列:内核维护的链表,进程可以发送/接收特定格式的消息。
- 共享内存:效率最高的IPC方式,多个进程直接读写同一块内存区域,通常需要配合信号量或互斥锁使用来保证同步。
- 信号:异步通信机制,用于通知接收进程某个事件已发生。
- 套接字:最通用的IPC,可用于不同主机间的进程通信,也支持同主机。
- 文件锁:通过对文件加锁来实现进程间互斥。
面试脚本:
“进程间同步的常用方式有信号量、管道、共享内存、消息队列等。在实际项目中,我使用过共享内存配合信号量的方式来实现高性能的数据交换,例如在数据采集和处理的解耦场景中。也用过命名管道来实现简单的命令和控制信息传递。选择哪种方式取决于对性能、复杂度和进程关系的考量。”
7. 协程?不了解
面试脚本(如果不会):
“抱歉,我对协程的了解目前还比较有限,只知道它是一种比线程更轻量的用户态‘微线程’,由程序员在应用层进行调度,切换开销极小,常用于高并发网络编程。我理解它是异步编程的一种重要范式,例如在Go语言中广泛使用。这是我计划下一步深入学习的知识点。”
8. 锁:自旋锁和互斥锁区别、读写锁
回答要点与对比图:
- 实现层面:互斥锁在获取不到锁时会让线程睡眠,发生上下文切换,由内核调度;自旋锁则让线程循环忙等待,持续检查锁状态。
- 开销:互斥锁有上下文切换开销;自旋锁占用CPU时间。
- 适用场景:
- 互斥锁:锁持有时间较长的场景(如文件IO、复杂计算)。
- 自旋锁:锁持有时间极短(如在多核CPU上保护一个简单的变量自增),且不希望引入睡眠开销。
读写锁:一种特殊的锁,区分“读”和“写”。
- 规则:共享读,独占写。写锁优先级通常高于读锁。
- 场景:非常适合“读多写少”的场景,能大幅提升并发性能。
面试脚本:
“互斥锁和自旋锁的核心区别在于等待锁时的行为。互斥锁会让线程休眠,让出CPU,适合等待时间长的场景;而自旋锁是‘忙等待’,避免上下文切换的开销,适用于锁持有时间极短的临界区。读写锁则是对互斥锁的优化,允许多个读线程同时进入,但在有写线程时独占,特别适合读多写少的并发数据结构。”
二、 计算机网络
9. TCP三次握手 & 四次挥手
回答要点与示意图:
三次握手(建立连接):目标是同步双方的初始序列号。
- Client -> Server:
SYN=1, seq=x - Server -> Client:
SYN=1, ACK=1, seq=y, ack=x+1 - Client -> Server:
ACK=1, seq=x+1, ack=y+1
四次挥手(终止连接):因为TCP连接是全双工的,每方向需要单独关闭。
- A -> B:
FIN=1, seq=u - B -> A:
ACK=1, seq=v, ack=u+1(此时A到B方向连接关闭,B可能还要发数据) - B -> A:
FIN=1, ACK=1, seq=w, ack=u+1 - A -> B:
ACK=1, seq=u+1, ack=w+1(等待2MSL后A关闭)
面试脚本:
“三次握手的本质是交换彼此的初始序列号,并确认对方的收发能力。‘三次’是最少的可靠次数。四次挥手是因为TCP连接是全双工的,一方发送FIN只表示自己数据发完了,但还可以接收对方的数据,所以需要两边分别进行关闭确认。”
10. TCP和UDP区别
回答要点:
| 特性 | TCP | UDP |
|---|---|---|
| 连接 | 面向连接,可靠 | 无连接,不可靠 |
| 可靠性 | 有确认、重传、排序机制 | 尽最大努力交付 |
| 数据形式 | 字节流,无边界 | 数据报,有边界 |
| 头部开销 | 大(20-60字节) | 小(8字节) |
| 速度 | 慢(建立连接、保证可靠) | 快 |
| 控制 | 有流量控制、拥塞控制 | 无 |
| 应用场景 | HTTP、FTP、邮件等 | 视频流、DNS、游戏音视频 |
面试脚本:
“TCP和UDP最根本的区别在于TCP是面向连接的、可靠的字节流协议,而UDP是无连接的、不可靠的数据报协议。因此TCP保证了数据顺序和正确性,但开销大、延迟高;UDP不保证,但开销小、速度快。选哪个取决于应用需求:要可靠就用TCP,要实时或能容忍丢包就用UDP。”
11. UDP需要连接吗?
面试脚本:
“UDP协议本身是无连接的,发送数据前不需要像TCP那样进行握手建立连接。但是,在应用层,我们可以基于UDP模拟‘连接’的概念,比如在QUIC协议或一些自定义的游戏协议中,会设计握手、状态维护等逻辑来实现可靠的、有状态的数据传输,但这完全是应用程序自己实现的,与UDP层无关。”
三、 QT
12. 信号和槽
回答要点:
- 信号:由对象在特定情况下(如按钮被点击)
emit的特殊函数。 - 槽:普通的成员函数,用于响应特定信号。
- 连接:
connect(sender, SIGNAL, receiver, SLOT),建立了对象间松耦合的通信桥梁。
面试脚本:
“信号和槽是Qt的核心机制,用于实现对象间的松耦合通信。当某个对象的信号被
emit时,所有连接到这个信号的槽函数都会被自动调用。它比回调函数更安全、灵活,因为发送者不需要知道接收者的任何信息。”
13. 信号和槽函数需要是一个线程的吗?
面试脚本:
“不一定。Qt的信号槽连接类型决定了它们的执行关系。最重要的两种是:
Qt::AutoConnection(默认):如果发送者和接收者在同一线程,槽函数在发送者线程同步执行;如果在不同线程,信号会转换为一个事件,放入接收者线程的事件循环中异步执行。Qt::QueuedConnection:无论是否同线程,槽函数都在接收者线程异步执行。
因此,Qt的信号槽机制是天然支持跨线程通信的,这极大地简化了多线程编程。”
四、 C++
14. 构造函数和析构函数的调用顺序
面试脚本:
“构造顺序是 ‘由内向外’ :先调用基类构造函数,再按声明顺序初始化成员变量,最后执行派生类自己的构造函数体。析构顺序则完全相反,是 ‘由外向内’ :先执行派生类析构函数体,再按声明逆序析构成员变量,最后调用基类析构函数。这保证了依赖关系的正确性。”
15. 静态多态和动态多态,实现原理
回答要点:
- 静态多态(编译期):
- 实现:主要通过模板和函数重载。
- 原理:编译器在编译期间根据具体类型生成不同的代码,进行名字修饰和决议。
- 特点:零运行时开销,但可能导致代码膨胀。
- 动态多态(运行期):
- 实现:通过虚函数和继承。
- 原理:依赖于虚函数表。每个有虚函数的类都有一个
vptr指向vtable,vtable中存放着虚函数地址。调用时通过vptr找到正确的函数地址。 - 特点:运行时有间接调用开销,但灵活。
面试脚本:
“静态多态在编译期决定,比如模板,
std::sort可以给任何迭代器类型用。动态多态在运行期决定,通过虚函数实现,比如用基类指针调用派生类重写的函数。动态多态的核心是虚函数表,每个对象通过虚表指针来找到自己实际该调用的函数。”
16. 指针和引用
面试脚本:
“指针是一个变量,存储地址,可以为
nullptr,自身有内存空间,可以改变指向。引用是对象的别名,定义时必须初始化,且一旦绑定不能更改,没有自己的内存空间(编译器实现)。从底层看,引用通常通过指针实现。引用更安全,语法上更像直接操作对象。”
17. static
面试脚本:
“
static关键字有多个含义:
- 在函数/文件作用域:修饰变量或函数,使其具有内部链接性,仅在当前编译单元可见。
- 在类作用域:修饰成员变量,属于类而非对象,所有对象共享;修饰成员函数,没有
this指针,只能访问静态成员。- 在函数内部(局部静态变量):使变量的生命周期贯穿整个程序,但作用域仍在函数内,首次执行时初始化。”
18. 介绍智能指针,shared_ptr的实现原理,用过哪些?
回答要点:
- 种类:
std::unique_ptr(独占所有权)、std::shared_ptr(共享所有权)、std::weak_ptr(弱引用,解决循环引用)。 shared_ptr原理:采用引用计数。拷贝构造或赋值时计数+1,析构时计数-1,当计数为0时销毁管理的内存。计数是原子操作,线程安全。make_sharedvsnew:make_shared:一次分配内存,同时存放对象和控制块(计数等),效率更高、更安全(无异常安全问题)。new+shared_ptr:两次分配(对象和控制块)。
面试脚本:
“智能指针用于自动管理动态内存,防止内存泄漏。
shared_ptr使用引用计数实现共享所有权。我用过unique_ptr管理独占资源,比如工厂返回的对象;用shared_ptr和weak_ptr配合管理具有复杂生命周期的对象,比如缓存中的对象。推荐使用make_shared,因为它效率更高且是异常安全的。”
19. C++和C语言区别
面试脚本:
“C++是C的超集,但理念不同。C是过程式,核心是函数和指针。C++是多范式,核心是面向对象(类、封装继承多态)、泛型编程(模板)和RAII(资源获取即初始化,智能指针是典型)。C++有异常、重载、引用等特性,而C没有。C++标准库更强大(STL)。总的来说,C++提供了更高级的抽象来管理复杂度。”
20. 面向对象三大特性…虚函数和纯虚函数
面试脚本:
“三大特性是封装、继承、多态。
- 封装:将数据和操作绑定,隐藏实现细节,只暴露接口。目的是提高安全性、降低耦合、便于维护。
public是公有,protected是子类可访问,private是仅本类访问。- 绕过private:从语言标准角度,无法绕过。但可以通过一些‘非正规’手段,比如获取对象内存布局后通过指针偏移修改,或者使用
friend(友元本身就是设计的一部分)。但强烈不建议这样做,这破坏了封装的设计初衷。- 虚函数:允许子类重写,实现多态。纯虚函数是
virtual func() = 0;,含有纯虚函数的类是抽象类,不能实例化,用于定义接口规范。子类必须实现所有纯虚函数才能实例化。”
五、 补充问题回答脚本
2. 多态的使用?会有什么情况?
“多态主要用于:1) 用基类指针/引用统一管理不同派生类对象,调用通用接口。2) 在容器中存放基类指针实现异构集合。常见情况是:工厂模式返回产品指针;策略模式中动态切换算法。需要注意的情况是:基类析构函数应为虚函数,否则通过基类指针删除派生类对象会导致资源泄露(派生部分未析构)。”
3. 除了菱形继承还有什么坑点?
“除了菱形继承带来的二义性和数据冗余(需用虚继承解决),还有:
- 过度设计:为了继承而继承,应优先使用组合而非继承。
- 脆弱的基类问题:基类修改可能意外破坏所有派生类。
- 切片问题:派生类对象赋值给基类对象时,派生类特有部分会被‘切掉’。
- 重载(overload)被隐藏:派生类定义同名函数会隐藏基类所有重载版本,需用
using引入。”
5. make_shared和直接new一个出来有什么不一样?(同上18)
6. 进程和线程?线程有哪些状态?
“进程是资源分配(内存、文件)的基本单位,线程是CPU调度的基本单位,一个进程至少有一个线程。线程共享进程的内存和资源,但有自己的栈和寄存器。线程状态主要有:新建、就绪、运行、阻塞(等待)、终止。在Linux中,线程就是轻量级进程(LWP)。”
7. HTTP 1, 2, 3
“HTTP/1.1:持久连接、管道化,但仍有队头阻塞。HTTP/2:二进制分帧、多路复用(解决队头阻塞)、头部压缩、服务器推送,但在TCP层仍有队头阻塞。HTTP/3:将传输层从TCP改为基于UDP的QUIC协议,彻底解决队头阻塞,内置TLS加密,支持0-RTT快速连接。演进的核心目标是降低延迟,提高性能和安全。”

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 24
24 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)