AAAI 即插即用 | 告别标准卷积!这个“风车”算子PConv,让你的YOLO模型在红外“鬼影”中精准索敌
本文提出了一种红外小目标检测的创新方法,通过风车形卷积(PConv)和基于尺度的动态损失(SDLoss)提升检测性能。PConv采用非对称卷积核模拟目标高斯分布特性,在少量参数增加下显著扩大感受野;SDLoss根据目标尺度动态调整位置与尺度损失的权重,有效缓解标签噪声影响。实验验证了方法在多个模型和数据集上的有效性,并构建了新的SIRST-UAVB基准数据集。该研究为红外小目标检测提供了高效且通用
1. 基本信息
-
标题: Pinwheel-shaped Convolution and Scale-based Dynamic Loss for Infrared Small Target Detection
-
论文来源:https://arxiv.org/pdf/2412.16986
2. 核心创新点
-
提出风车形卷积 (PConv) :针对红外小目标呈高斯分布的特性,设计了一种即插即用的PConv模块,以非对称卷积核有效扩大感受野并增强底层特征提取能力,参数增加量极小。
-
提出基于尺度的动态损失 (SD Loss) :为解决小目标标签的IoU波动问题,设计了SD Loss,该损失能根据目标尺度动态调整位置损失和尺度损失的权重,提升了模型对不同尺度目标的检测性能。
-
构建新基准数据集 (SIRST-UAVB) :创建了迄今为止最大、最具挑战性的真实场景单帧红外小目标检测数据集SIRST-UAVB,包含大量无人机和鸟类的小目标,背景复杂,推动了该领域的研究。
-
验证通用有效性 : 将PConv和SD Loss成功应用于多种主流检测与分割模型,并在公共数据集和自建数据集上均取得了显著的性能提升,证明了其方法的有效性和泛化能力。
➔➔➔➔点击查看原文,获取本文及其他精选即插即用模块集合![]() https://mp.weixin.qq.com/s/6R4uGo2b2aqx7LYIAnOaYQ
https://mp.weixin.qq.com/s/6R4uGo2b2aqx7LYIAnOaYQ
3. 方法详解
本文提出的两个核心模块——风车形卷积(PConv)和基于尺度的动态损失(SD Loss)——分别从网络结构和损失函数两个层面优化了红外小目标检测。
风车形卷积 (Pinwheel-shaped Convolution, PConv)
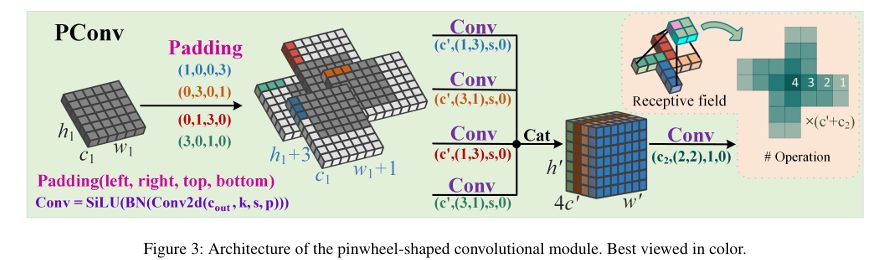
整体结构概述:PConv是一种专为红外小目标设计的卷积模块。它通过并行的非对称卷积核(如1x3和3x1)模拟目标能量由中心向外扩散的高斯分布特性。该结构通过分组卷积和特定填充策略,在少量增加参数的情况下,显著扩大了感受野,并增强了模型对小目标中心特征的关注度。
风车形卷积模块的架构
步骤分解:
-
并行非对称卷积: 输入特征图
X被送入四个并行的卷积分支。每个分支使用不同方向的非对称卷积核(1x3或3x1)和非对称填充(Padding),以捕捉不同方向的特征。例如,一个分支使用P(1,0,0,3)的填充和1x3的卷积核。 -
特征拼接 (Concatenation): 将四个分支输出的特征图在通道维度上进行拼接,整合来自不同方向的特征信息。
-
通道融合与降维: 使用一个
2x2的卷积核对拼接后的特征图进行卷积,该步骤不使用填充。这不仅融合了来自四个“风车叶片”的特征,还起到了类似通道注意力的作用,并调整输出特征图的尺寸,使其能直接替换标准的卷积层。 -
高效感受野扩展: PConv的设计使其感受野的有效性从中心向外递减,类似高斯分布。相较于一个标准的
3x3卷积(感受野为9),PConv(k=3)的感受野达到25,增大了177%,而参数量仅增加了111%(在特定网络配置下),实现了高效的感受野扩展。
基于尺度的动态损失 (Scale-based Dynamic Loss, SD Loss)
整体结构概述:SD Loss旨在解决小目标因人工标注不精确导致的IoU损失剧烈波动问题。其核心思想是:对于小目标,位置信息比形状(IoU)信息更可靠。因此,SD Loss根据目标的实际尺度,动态调整尺度损失(Sloss)和位置损失(Lloss)在总损失中的贡献权重。
步骤分解:
-
定义基础损失:
-
对于**边界框(BBox)**,沿用CIoU损失的思路,将损失分为尺度损失
L_BS(基于IoU和长宽比)和位置损失L_BL(基于中心点距离)。
-
对于**掩码(Mask)**,沿用SLS损失的思路,定义尺度损失
L_MS(基于掩码IoU)和位置损失L_ML(基于极坐标下的平均距离和角度)。
-
-
计算动态影响系数: 根据当前特征图相对于原图的缩放比例
R_OC,计算目标真实大小,并依此生成动态影响系数β。系数被限制在δ范围内,δ是一个可调超参数。其中
B_gtmax和M_gtmax被设为81像素(小目标定义上限)。 -
构建最终动态损失:
-
SDB Loss (用于BBox): 对小目标,降低尺度损失
L_BS的权重,增加位置损失L_BL的权重。
-
SDM Loss (用于Mask): 论文发现对于掩码,增强尺度损失
L_MS的权重效果更好,以确保模型更关注掩码本身的重合度。
-
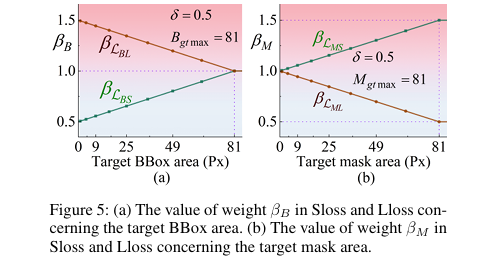
β 的值随目标面积变化
4. 即插即用模块作用
PConv 模块
适用场景
-
核心任务: 红外小目标检测 (Infrared Small Target Detection, IRST)、红外小目标分割 (IRST Segmentation)。
-
适用模型: 可作为即插即用模块,替换CNN模型(如YOLO系列、MSHNet等)的底层标准卷积层,尤其是在处理低信噪比、特征稀疏的图像任务时具有潜力。
主要作用
-
模拟高斯分布: 模块结构的设计更好地匹配了红外小目标中心亮、边缘暗的高斯空间分布特性。
-
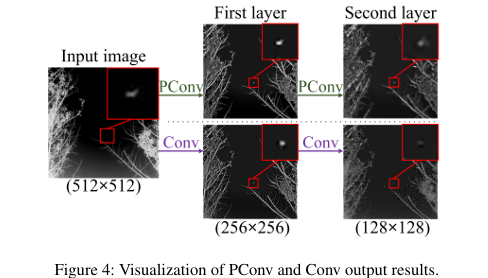
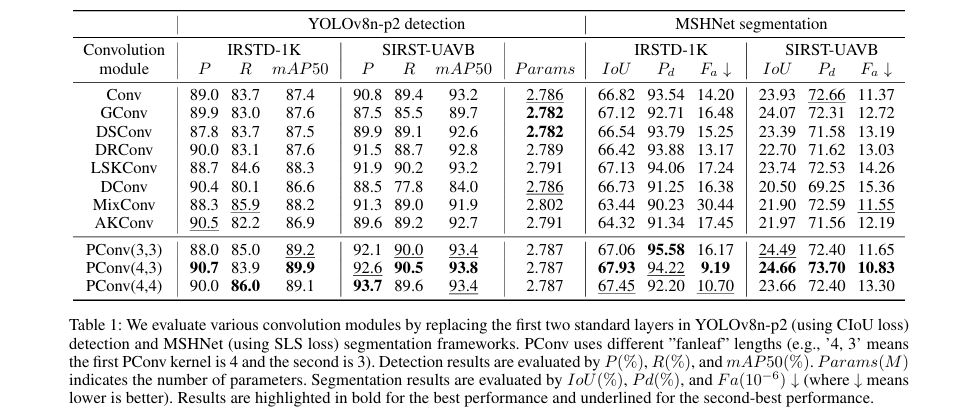
增强特征提取: 提高了网络对小目标底层特征的分析和提取能力,如 图4 所示,PConv的输出能有效增强目标与背景的对比度,并抑制杂波。
-
大幅扩大感受野: 以极小的参数增量(相较于标准卷积),显著扩大了感受野,有助于捕捉更丰富的上下文信息以区分目标和背景。
-
提升检测性能: 实验表明(如 表1),在YOLOv8n-p2和MSHNet等模型中替换标准卷积后,PConv在多个指标上均带来了显著性能提升。
总结
PConv是一个为红外小目标“量身定制”的高效卷积算子,它用模拟高斯分布的结构换取了更强的特征表达和更大的感受野,是提升小目标检测模型性能的即插即用利器。
SD Loss 模块
适用场景
-
核心任务: 适用于所有基于边界框(BBox)或掩码(Mask)的红外小目标检测与分割任务。
-
问题场景: 特别适用于处理目标尺寸变化大、小目标占比高、以及标签存在噪声或不确定性(如IoU易波动)的场景。
主要作用
-
降低标签噪声影响: 通过动态调整损失权重,降低了因人工标注不精或目标过小导致的IoU剧烈波动对模型训练的负面影响。
-
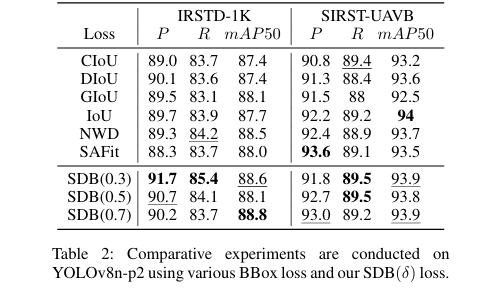
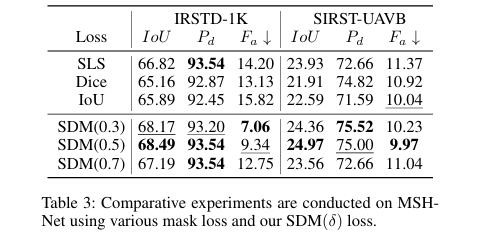
提升回归稳定性与精度: 使得模型在训练时对小目标更关注位置精度,对大目标更关注形状匹配,从而提高了回归的稳定性和最终的检测精度(如 表2 和 表3 所示)。
-
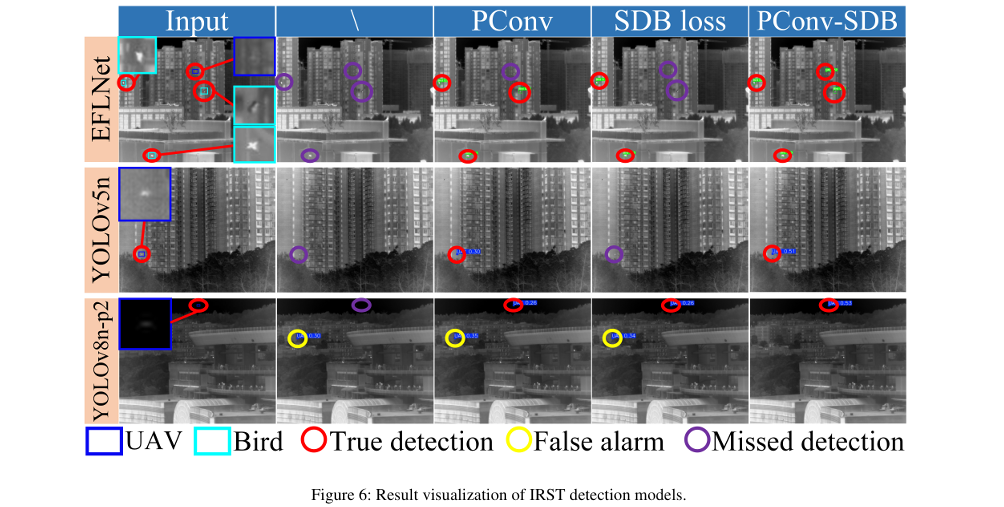
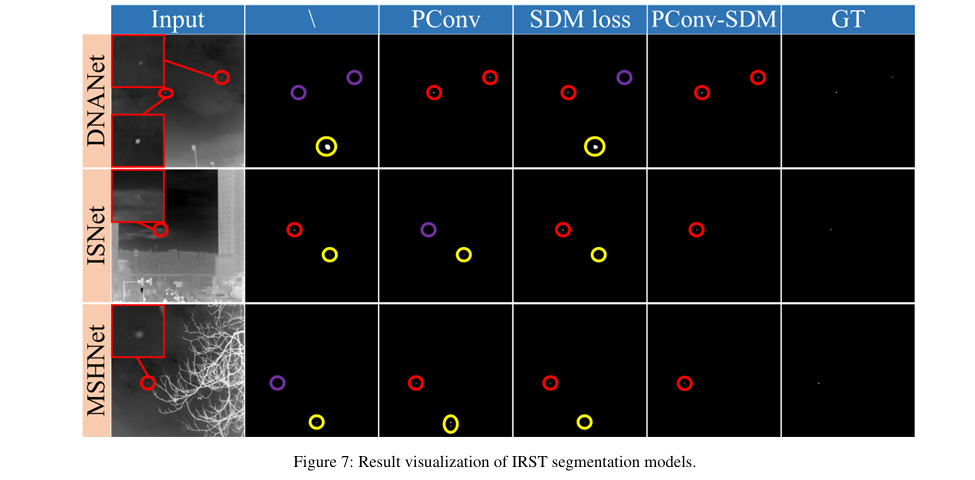
增强弱信号检测: 通过更稳定的损失函数引导,模型能更好地检测到信号微弱的小目标,减少漏报(如 图6 和 图7 的可视化结果所示)。
-
保持简洁高效: 相比于一些引入复杂数学运算(如指数运算)的损失函数,SD Loss的计算简单高效,不增加额外的计算负担。
总结
SD Loss是一个简单而有效的动态损失函数,它通过智能地权衡位置与尺度的重要性,显著提升了模型在复杂场景下对多尺度(尤其是微小)目标的检测鲁棒性。
➔➔➔➔点击查看原文,获取本文及其他精选即插即用模块集合![]() https://mp.weixin.qq.com/s/6R4uGo2b2aqx7LYIAnOaYQ
https://mp.weixin.qq.com/s/6R4uGo2b2aqx7LYIAnOaYQ

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 8
8 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)