【2025具身智能大模型·系列18】RoboBrain-X0:智源研究院开源的跨本体泛化具身模型,开启机器人新时代
RoboBrain-X0是由北京智源人工智能研究院开源的全球首个支持零样本跨本体泛化的具身模型。它能够在无需针对不同机器人进行微调的情况下,驱动多种不同构造的真实机器人完成基础操作任务,突破了传统机器人模型对单一硬件形态的依赖。在少量样本(如50条)微调后,还能进一步提升对复杂任务的跨本体适配性。该模型通过统一建模视觉、语言与动作,将任务分解为通用语义动作序列,再实时翻译为具体机器人的可执行指令,
系列篇章💥
目录
前言
在当今人工智能与机器人技术飞速发展的时代,如何赋予机器人更强的泛化能力和适应性,使其能够在多种环境中高效完成任务,已成为科研人员亟待攻克的关键难题。智源研究院开源的RoboBrain-X0模型,凭借其创新性的跨本体泛化能力,为这一领域带来了突破性的进展,有望开启机器人技术发展的新篇章。
一、项目概述
RoboBrain-X0是由北京智源人工智能研究院开源的全球首个支持零样本跨本体泛化的具身模型。它能够在无需针对不同机器人进行微调的情况下,驱动多种不同构造的真实机器人完成基础操作任务,突破了传统机器人模型对单一硬件形态的依赖。在少量样本(如50条)微调后,还能进一步提升对复杂任务的跨本体适配性。该模型通过统一建模视觉、语言与动作,将任务分解为通用语义动作序列,再实时翻译为具体机器人的可执行指令,实现了从感知到执行的一体化能力。
二、核心功能
(一)零样本跨本体泛化
突破传统机器人模型对单一硬件形态的依赖,无需针对不同机器人的微调,即可驱动多种真实机器人完成基础操作任务。
(二)小样本微调潜力
在少量样本(如50条)微调后,能进一步提升对复杂任务的跨本体适配性,展现出更强的泛化能力。
(三)控制一致性
不同本体在执行同一任务时,生成的动作原语序列高度一致,确保了实际物理执行的可靠性。
(四)统一建模视觉、语言与动作
通过将视觉、语言和动作进行统一建模,实现了从感知到执行的一体化能力,为机器人提供了更全面的智能支持。
(五)高效任务拆解
能将复杂任务分解为通用语义动作序列,再实时翻译为具体机器人的可执行指令,提高了任务执行的灵活性和适应性。
(六)开放数据集支持
开源了核心训练数据集RoboBrain-X0-Dataset,为开发者提供了丰富的数据资源,有助于加速具身智能技术的研发和应用。
三、技术揭秘
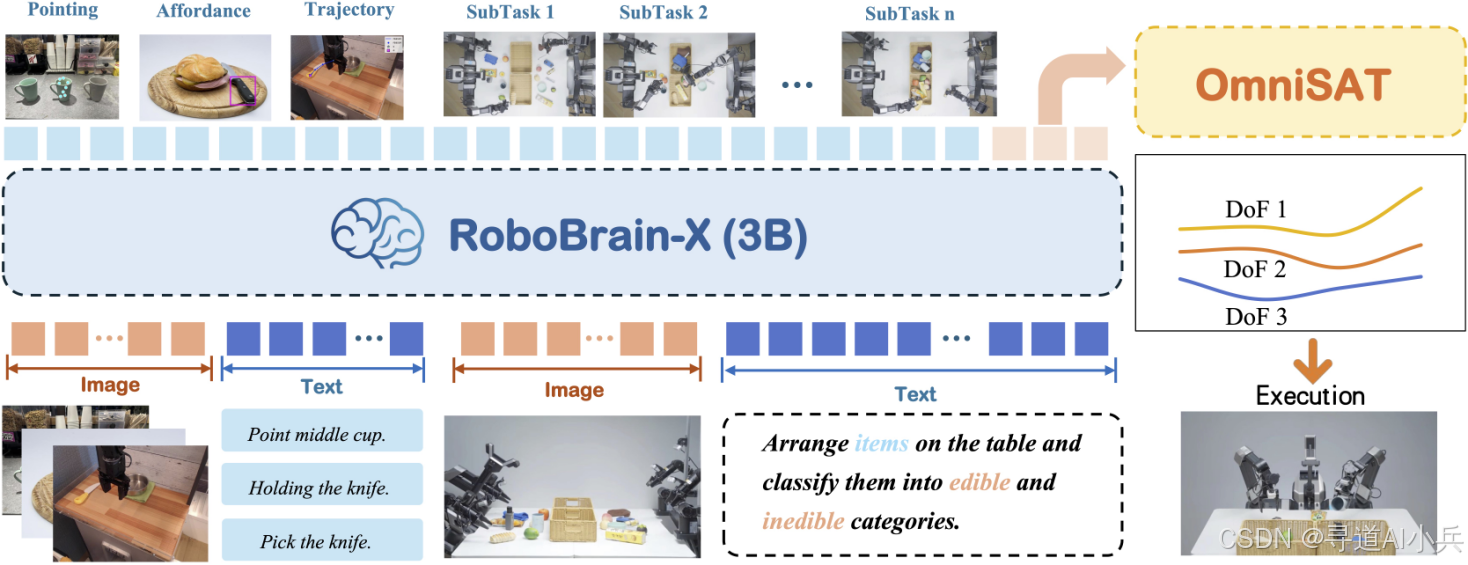
(一)本体映射机制
将任务分解为与机器人身体无关的通用语义动作序列,再通过映射机制将这些序列高效转译为多种机器人可直接执行的动作,实现跨本体泛化。
(二)统一动作空间
采用末端执行器在SE(3)任务空间中的姿态表示,结合统一动作词汇表(UAV)和动作标记器,将不同机器人的动作统一到一个共享的离散动作原语空间,确保语义一致性和可转移性。
(三)分组残差量化器(GRVQ)
将具有不同自由度和机械结构的连续控制序列映射到共享的离散动作原语空间,实现跨本体的语义一致性和可转移性。
(四)多模态输入与输出
模型接受单图像、多图像和文本输入,覆盖多种任务场景,并输出多维度的动作序列,驱动机器人完成操作。
(五)数据驱动的训练
在大量真实机器人数据和具身推理数据上进行训练,进一步整合了RoboBrain 2.0的数据,提升模型的泛化能力和任务执行能力。
四、应用场景
(一)服务机器人
在家庭、酒店、医院等服务场景中,RoboBrain-X0可以精准地完成物品递送任务,无论是将药品准时送到患者手中,还是把客房用品送到酒店客人房间,都能高效完成。在清洁整理方面,它能识别不同区域的清洁需求,灵活调整清洁工具和方式,无论是清扫地面灰尘还是擦拭桌面污渍,都能做到干净彻底。陪护互动也是它的强项。
(二)智能制造
智能制造领域,在工厂车间,它可以承担物料搬运工作,准确地将原材料从仓库运输到生产线指定位置,还能根据生产进度实时调整搬运路线和频率,确保物料供应的及时性。对于零部件装配任务,它凭借精准的动作控制能力,能够将各种形状和尺寸的零部件准确地安装到产品上,装配精度高,大大提高了生产效率和产品质量。
(三)物流仓储
RoboBrain-X0能够助力物流仓储的自动化升级。在货物分拣环节,它可以快速识别货物的种类、尺寸和目的地信息,然后准确地将货物分拣到对应的区域,分拣速度快且错误率低。搬运工作也不在话下,它能根据货物的重量和形状,灵活调整搬运方式,将货物从入库区搬运到存储区,或者从存储区搬运到出库区,还能实现多层码垛,合理利用仓储空间。
(四)教育科研
在机器人技术教学方面,它为学生提供了直观的实践对象,学生可以通过编程和操作它,深入理解机器人的感知、决策和执行过程,掌握机器人的控制原理和算法,培养实践能力和创新思维。在人工智能研究领域,它为研究人员提供了丰富的实验数据和应用场景,研究人员可以基于它开展机器人视觉识别、自然语言处理、多模态融合等前沿技术的研究。
(五)特殊环境作业
在一些危险或特殊环境中,RoboBrain-X0可以代替人类执行各种任务。在核辐射区域,它可以进行设备的检测、维修和样品采集工作,通过远程控制和自主决策,减少人员暴露在辐射环境中的时间,保障人员安全。在深海探索中,它可以承受巨大的水压,完成海洋生物观测、海底矿产勘探、设备安装与维护等任务。
五、快速使用
(一)环境搭建
- 拉取Docker镜像:
docker pull harbor.baai.ac.cn/flagrelease-public/robobrain_x0_flagscale
- 运行容器:
docker run -itd \
--name robotics_pretrain \
--privileged \
--gpus all \
--net=host \
--ipc=host \
--device=/dev/infiniband \
--shm-size 512g \
--ulimit memlock=-1 \
-v /nfs/hcr/models/:/models \
ghcr.io/robobrain-roboos-robotic/robotics_pretrain_flagscale:cuda12.4.1-cudnn9.5.0-python3.12-torch2.6.0-time250928-ssh
(二)训练模型
- 进入容器并激活环境:
cd /root/robotics_pretrain/flag-scale
conda activate flagscale-train
- 运行训练脚本:
python run.py \
--config-path ./examples/qwen2_5_vl/conf \
--config-name train_3b_action_S6_subtask_agilex_eval5_demo \
action=run
(三)模型推理
- 启动推理服务器:
python serve_franka.py
- 客户端发送请求:客户端将机器人状态和图像数据打包成JSON格式,通过HTTP POST请求发送到服务器,服务器返回动作指令,客户端控制机器人执行。
六、结语
RoboBrain-X0作为全球首个支持零样本跨本体泛化的具身模型,为机器人技术的发展带来了新的突破。其强大的泛化能力和灵活的任务执行能力,使其在多个领域具有广泛的应用前景。随着技术的不断进步和开源社区的共同努力,RoboBrain-X0有望在更多场景中发挥重要作用。
七、项目地址
- 项目官网:https://superrobobrain.github.io/
- Github仓库:https://github.com/FlagOpen/RoboBrain-X0
- HuggingFace 模型库:https://huggingface.co/BAAI/RoboBrain-X0-Preview
- RoboBrain-X0-Dataset:https://huggingface.co/datasets/BAAI/RoboBrain-X0-Dataset

🎯🔖更多专栏系列文章:AI大模型提示工程完全指南、AI大模型探索之路(零基础入门)、AI大模型预训练微调进阶、AI大模型开源精选实践、AI大模型RAG应用探索实践🔥🔥🔥 其他专栏可以查看博客主页📑
😎 作者介绍:资深程序老猿,从业10年+、互联网系统架构师,目前专注于AIGC的探索(CSDN博客之星|AIGC领域优质创作者)
📖专属社群:欢迎关注【小兵的AI视界】公众号或扫描下方👇二维码,回复‘入群’ 即刻上车,获取邀请链接。
💘领取三大专属福利:1️⃣免费赠送AI+编程📚500本,2️⃣AI技术教程副业资料1套,3️⃣DeepSeek资料教程1套🔥(限前500人)
如果文章内容对您有所触动,别忘了点赞、⭐关注,收藏!加入我们,一起携手同行AI的探索之旅,开启智能时代的大门!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 22
22 0
0- 0



 已为社区贡献41条内容
已为社区贡献41条内容

所有评论(0)