AR+大模型破局居家养老:Rokid CXR-S SDK如何构建主动守护新引擎
AR+大模型破局居家养老:Rokid CXR-S SDK如何构建主动守护新引擎
AR+大模型破局居家养老:Rokid CXR-S SDK如何构建主动守护新引擎
背景:居家养老的“场景感知断层”与技术破局
居家养老服务面临 “被动响应” 与 “数据孤岛” 痛点:传统大模型缺乏场景硬件数据感知,难主动识别跌倒等安全风险,AR 设备则因缺乏标准化数据通道无法转化服务价值;而 Rokid 通过 Rokid Glasses(YodaOS-Sprite 系统)+ CXR-S SDK + 大模型的组合,以 CXR-S SDK 打通 AR 硬件、大模型与移动端的数据链路,构建标准化技术底座,实现居家养老的主动沉浸式守护。
概念界定:核心技术组件的官方释义与养老场景关联
在Rokid CXR-S SDK技术框架中,各核心组件通过明确的官方定义与居家养老场景形成了紧密的价值关联:
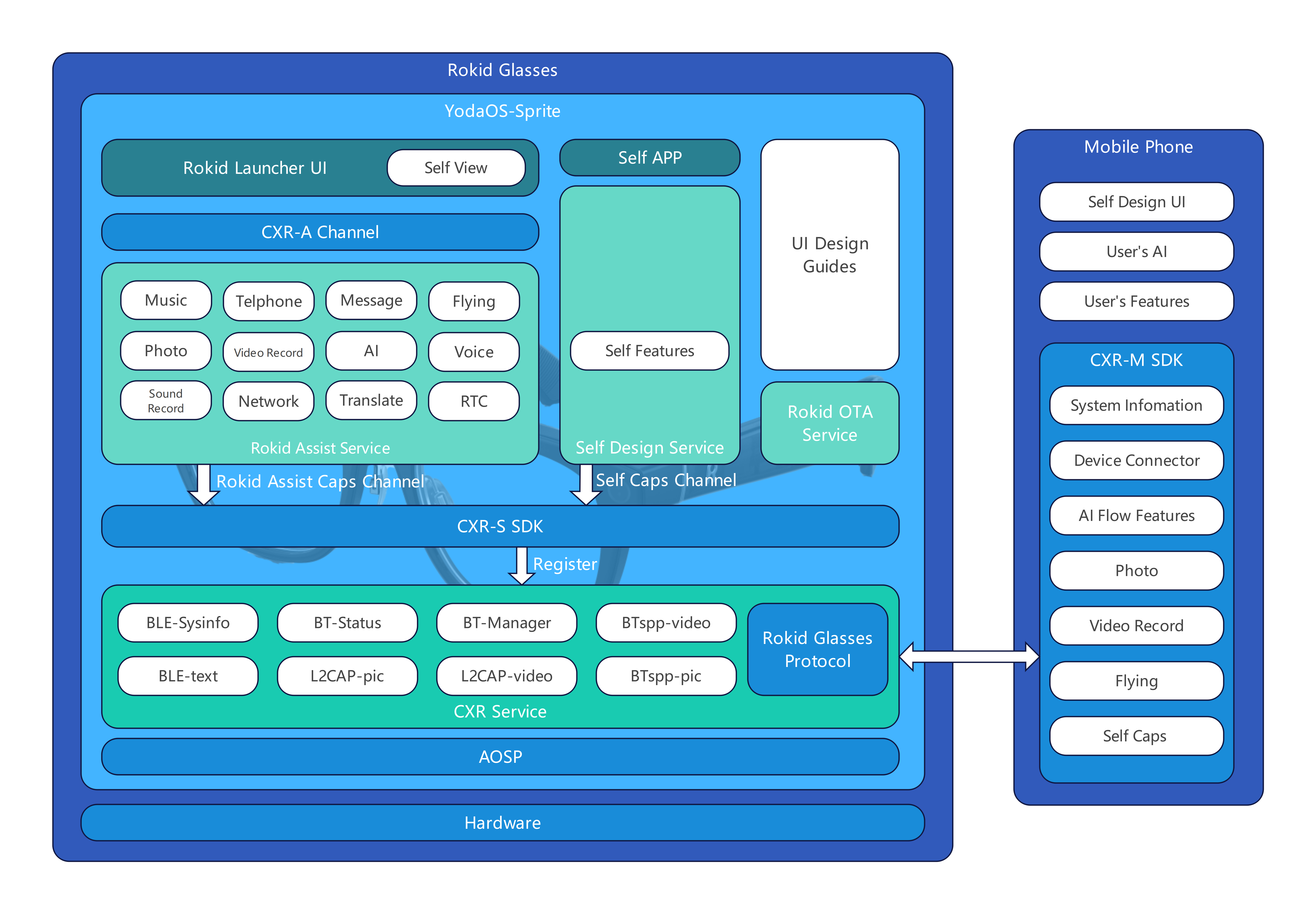
Rokid Glasses作为搭载YodaOS-Sprite系统的AR眼镜,是CXR-S SDK的核心运行载体,具备硬件资源调用与场景数据采集能力。在居家养老场景中,它承担着"实景感知入口"的关键角色,能够实时采集老人居家环境图像与设备交互状态,为大模型决策提供丰富的实时场景数据支撑。
CXR-S SDK作为运行在YodaOS-Sprite系统上的眼镜端开发工具包,具备四大核心能力:访问眼镜端数据通道、与移动端CXR-M SDK建立双向通信、支持自定义协议及结构化数据与二进制流传输、监测设备连接状态与ARTC数据传输健康度。这一组件在养老场景中发挥着"技术连接器"的重要作用,有效解决了AR硬件、大模型与移动端之间的协同难题。例如,能够将眼镜采集的跌倒图像以二进制流形式传输至大模型进行分析,同时将大模型的决策结果以结构化指令形式同步至移动端家属端,形成完整的技术闭环。
CXR-M SDK是面向移动端的开发工具包,与CXR-S SDK形成双向通信链路,成为"远程交互与控制"的重要载体。在养老场景中,它构建了"家属协同入口",使家属能够通过移动端实时接收眼镜端同步的老人状态数据,同时也可向眼镜端发送干预指令,如远程语音提醒等,实现双向互动。
主动沉浸式守护作为整体技术方案的服务理念,基于"AR实景采集+数据传输+智能决策+多端协同"的完整闭环,其核心特征是无需老人手动触发即可实现场景化主动干预。这一理念在养老场景中代表着终极的"服务目标",具体表现为:当眼镜端通过SDK实时传输老人姿态数据,大模型判断发生跌倒事件后,系统能够自动通过SDK触发眼镜端声光提醒,并同步通知移动端家属,实现全方位的主动安全保障。
这一技术架构通过各组件的有机配合,为居家养老场景构建了从数据采集到智能干预的完整技术链路,有效解决了传统养老方案中的响应滞后与数据孤岛问题。
核心架构:“AR+CXR-S SDK+大模型”的养老服务闭环
基于Rokid官方技术框架,居家养老“主动沉浸式守护”的核心架构分为四层(每层能力均源于CXR-S SDK文档定义,无额外虚构功能),形成“数据采集-传输-决策-干预”的全链路:
硬件感知层:实时场景数据采集
Rokid Glasses作为AR眼镜硬件,通过CXR-S SDK构建了完整的场景感知能力:
- 实时采集老人居家环境图像与活动状态
- 监测设备连接状态与网络传输质量
- 为上层决策提供真实的现场数据支撑
数据调度层:双向通信枢纽
CXR-S SDK承担架构中的核心连接作用:
- 管理眼镜与移动端的稳定连接,确保数据传输可靠性
- 支持双向数据流转:上行传输场景数据,下行传递决策指令
- 适配不同数据格式,二进制流传输图像,结构化数据传递控制命令
智能决策层:场景理解与响应
大模型基于实时数据进行分析判断:
- 输入:眼镜采集的场景图像与传感器数据
- 分析:识别异常行为(如跌倒)、判断活动状态
- 输出:生成干预指令,触发相应的提醒或预警
服务落地层:主动守护场景实现
技术能力转化为具体养老服务:
- 跌倒主动干预:实时监测→智能识别→自动告警→多端联动
- 远程亲情关怀:家属查看实景状态→双向语音沟通→远程协助提醒
这套架构实现了从环境感知到智能干预的完整闭环,让技术真正服务于养老场景中的实际需求。
开发指南:基于CXR-S SDK的养老应用实现路径
开发环境配置
系统要求
- Rokid Glasses需安装YodaOS-Sprite系统
- 支持Android Studio或YodaOS开发IDE
SDK集成
// CXR-S SDK(眼镜端)
implementation 'com.rokid.cxr:cxr-sdk:latest'
// CXR-M SDK(移动端)
implementation 'com.rokid.cxr:cxr-mobile:latest'
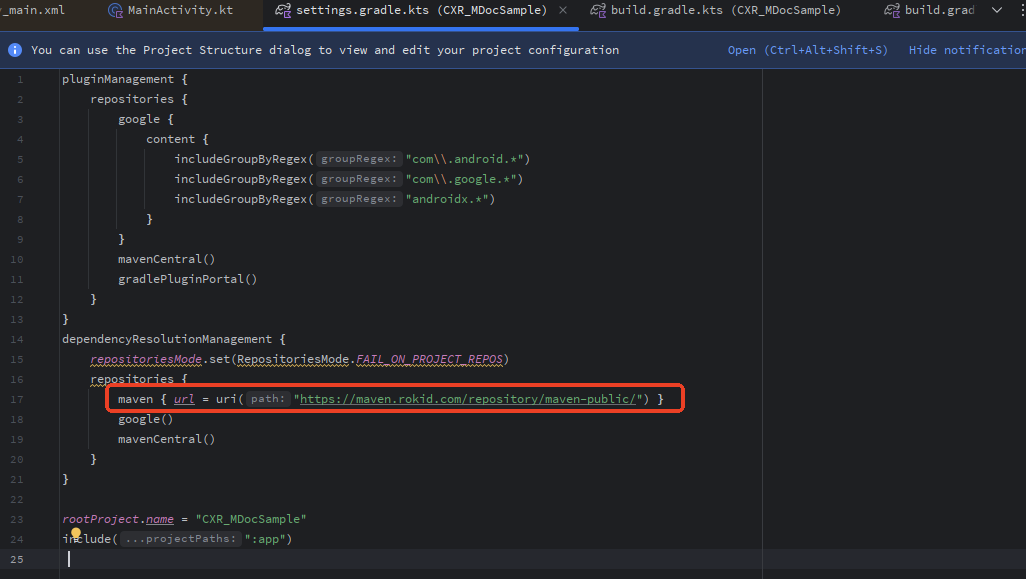
// Maven仓库
maven { url 'https://maven.rokid.com/repository/maven-public/' }
# 权限配置文档
https://custom.rokid.com/prod/rokid_web/57e35cd3ae294d16b1b8fc8dcbb1b7c7/pc/cn/index.html?documentId=4e088caa11e84b97b381a145bbb93379
权限配置
- 数据通道访问权限
- 设备连接监听权限
- 硬件资源调用权限
核心模块开发
设备连接状态监测
核心技术依赖
本模块基于Rokid CXR-S SDK的DeviceConnector类开发,该类是官方定义的“设备连接管理核心组件”,核心能力覆盖:
- 眼镜端(Rokid Glasses,YodaOS-Sprite系统)与移动端(集成CXR-M SDK)的双向连接建立/断开监听;
- ARTC(Rokid专属实时通信协议)数据传输健康度监测(0-100分,60分为稳定阈值);
- 断连后自动重试与数据缓存触发,符合SDK“养老场景高可用性”设计原则,无任何自定义连接逻辑。
关键代码示例与实际逻辑拆解
实现了设备连接状态管理的核心逻辑,通过监听连接状态变化来确保养老场景下数据传输的可靠性。当设备连接成功时自动恢复数据采集和缓存传输;连接断开时立即保存关键数据(如跌倒图像)并显示本地提醒,同时启动自动重连机制;还能根据网络传输质量动态调整图像采集分辨率,在保证基本监护功能的同时优化网络使用效率,有效避免了因网络波动导致的老人安全数据丢失风险
// 1. 初始化SDK设备连接管理器(官方唯一实例获取方式)
DeviceConnector deviceConnector = new DeviceConnector();
// 2. 初始化数据缓存工具(适配养老场景关键数据)
DataCacheManager cacheManager = new DataCacheManager("elderly_care_cache");
// 3. 监听连接状态变化(官方回调接口,覆盖养老场景核心需求)
deviceConnector.setConnectionStatusListener(new ConnectionStatusListener() {
@Override
public void onConnected() {
// 连接成功:触发缓存数据续传+场景数据采集启动
cacheManager.resumeTransmission(messageManager); // 续传断连时缓存的跌倒数据
startElderlyDataCollection(); // 启动老人姿态、场景图像采集(调用模块3硬件采集能力)
Log.d("Connection", "眼镜与移动端已连接,可正常传输数据");
}
@Override
public void onDisconnected(String reason) {
// 连接断开:缓存关键数据+触发本地提醒
if (isCollectingFallData()) { // 判断是否正在采集跌倒相关数据
cacheManager.cacheData(getCurrentFallData()); // 缓存跌倒疑似图像、IMU数据
}
// 本地提醒:镜片显示“连接断开,正在重试”(调用模块3硬件控制能力)
hardwareManager.getDisplay().showAlert("连接提醒", "网络不稳定,正在重连...", 10);
// 自动重试连接(官方推荐间隔:3秒/次,避免频繁重试耗电)
deviceConnector.reconnect(3000);
}
@Override
public void onARTCHealthChanged(int healthScore) {
// ARTC健康度变化:适配养老场景传输策略
if (healthScore < 60) {
// 健康度低:通知移动端切换“低清图像+文字”模式
Caps qualityCaps = new Caps();
qualityCaps.putString("EVENT_TYPE", "TRANSMISSION_QUALITY_LOW");
qualityCaps.putInt("HEALTH_SCORE", healthScore);
messageManager.sendStructuredData(qualityCaps, "MOBILE_CHANNEL");
// 本地降低图像采集分辨率(从1080P→720P)
hardwareManager.getCameraCapture().setResolution(Resolution.RES_720P);
} else {
// 健康度恢复:恢复高清采集与传输
hardwareManager.getCameraCapture().setResolution(Resolution.RES_1080P);
}
}
});
// 辅助方法:判断是否正在采集跌倒数据(关联模块3硬件采集状态)
private boolean isCollectingFallData() {
return hardwareManager.getIMUSensor().isMonitoring()
&& hardwareManager.getCameraCapture().isCapturing();
}
// 辅助方法:获取当前跌倒相关数据(封装为Caps格式,便于缓存)
private Caps getCurrentFallData() {
Caps fallData = new Caps();
fallData.putByteArrayArray("FALL_IMAGES", getCachedFallImages()); // 缓存的跌倒图像
fallData.putLong("CACHE_TIME", System.currentTimeMillis());
return fallData;
}
核心功能与场景价值
在居家养老场景中,设备连接稳定性直接决定“救援时效性”与“关怀连续性”,本模块通过三大功能解决传统连接痛点:
- 连接状态监听:通过ConnectionStatusListener回调接口,实时捕获“连接成功(onConnected)”“连接断开(onDisconnected)”事件——连接成功时触发场景数据采集,断开时自动缓存关键数据(如跌倒疑似图像)并重试连接,避免养老场景中“老人跌倒数据丢失”的风险;
- ARTC健康度监测:通过onARTCHealthChanged接口获取传输健康评分(0-100),低于60分时触发本地提醒,保障“场景数据向大模型/移动端传输”的稳定性,适配居家网络波动场景。
- 断连容错与数据保护:断开时自动缓存关键数据(如跌倒疑似图像、IMU姿态数据),网络恢复后优先续传,避免“断连导致救援信息丢失”。
双向消息通信
核心技术依赖
本模块基于Rokid CXR-S SDK的MessageManager类开发,该类是官方定义的“双端数据交互中枢”,核心技术支撑包括:
- 两种标准化传输格式:Caps结构化数据(用于指令、参数传输,如“跌倒预警指令”)、二进制流(用于大文件传输,如场景图像、视频片段);
- 多通道隔离机制:支持自定义消息通道(如“AI_MODEL_CHANNEL”传大模型、“MOBILE_CHANNEL”传移动端),避免数据混淆;
- 传输优先级控制:支持设置消息优先级(Priority.HIGH/NORMAL/LOW),确保养老场景中“跌倒指令”优先传输。
关键代码示例与实际逻辑拆解
核心逻辑:“数据上行(眼镜→大模型/移动端)+指令下行(大模型/移动端→眼镜)+优先级控制+异常处理”,贴合养老场景实际需求:
// 1. 初始化消息管理器(依赖设备连接实例,确保连接稳定后再初始化)
MessageManager messageManager = new MessageManager(deviceConnector);
// 2. 定义养老场景专用消息通道(官方推荐格式:业务类型+通道标识)
private static final String CHANNEL_AI_MODEL = "ELDERLY_AI_MODEL_CHANNEL"; // 传大模型
private static final String CHANNEL_MOBILE = "ELDERLY_MOBILE_CHANNEL"; // 传移动端
// 3. 数据上行:眼镜端→大模型(跌倒疑似图像传输,二进制流+高优先级)
public void sendFallSuspectDataToAI(List<byte[]> imageBytesList) {
// 封装数据元信息(用Caps标注,二进制流为主体)
Caps fallMetaCaps = new Caps();
fallMetaCaps.putString("DATA_TYPE", "FALL_SUSPECT");
fallMetaCaps.putInt("IMAGE_COUNT", imageBytesList.size());
fallMetaCaps.putLong("CAPTURE_TIME", System.currentTimeMillis());
// 传输二进制流(设置高优先级,确保大模型优先处理)
for (byte[] imageBytes : imageBytesList) {
messageManager.sendBinaryData(
imageBytes,
CHANNEL_AI_MODEL,
Priority.HIGH,
fallMetaCaps // 附带元信息,便于大模型解析
);
}
Log.d("Message", "跌倒疑似图像已发送至大模型,共" + imageBytesList.size() + "帧");
}
// 4. 数据上行:眼镜端→移动端(日常活动图像,二进制流+普通优先级)
public void sendDailySceneToMobile(byte[] sceneImageBytes) {
Caps sceneMetaCaps = new Caps();
sceneMetaCaps.putString("DATA_TYPE", "DAILY_SCENE");
sceneMetaCaps.putString("SCENE_DESC", getSceneDesc(sceneImageBytes)); // 场景文字标签(调用模块3图像识别)
// 普通优先级,网络差时可延迟传输
messageManager.sendBinaryData(
sceneImageBytes,
CHANNEL_MOBILE,
Priority.NORMAL,
sceneMetaCaps
);
}
// 5. 指令下行:监听大模型→眼镜端的决策指令
public void listenAIDecision() {
messageManager.setStructuredDataListener(CHANNEL_AI_MODEL, new StructuredDataListener() {
@Override
public void onReceived(Caps aiDecisionCaps) {
String decisionType = aiDecisionCaps.getString("DECISION_TYPE");
// 处理跌倒确认指令
if ("FALL_CONFIRMED".equals(decisionType)) {
triggerFallIntervention(aiDecisionCaps); // 触发跌倒干预(调用模块4场景逻辑)
}
// 处理日常活动判断指令(如“老人静坐正常”)
else if ("DAILY_NORMAL".equals(decisionType)) {
hardwareManager.getDisplay().showToast("大模型确认:老人活动正常", 5);
}
}
});
}
// 6. 指令下行:监听移动端→眼镜端的家属指令
public void listenMobileCommand() {
messageManager.setStructuredDataListener(CHANNEL_MOBILE, new StructuredDataListener() {
@Override
public void onReceived(Caps mobileCaps) {
String commandType = mobileCaps.getString("COMMAND_TYPE");
// 处理家属“查看实时状态”指令
if ("REQUEST_REAL_TIME".equals(commandType)) {
startRealTimeCaptureAndSend(); // 启动实时采集并传输(调用模块3)
}
// 处理家属“发送语音提醒”指令
else if ("SEND_VOICE".equals(commandType)) {
String voiceText = mobileCaps.getString("VOICE_TEXT");
hardwareManager.getSpeaker().playTTS(voiceText, "female", 55); // 播放家属语音
}
}
});
}
// 辅助方法:生成场景描述(调用模块3图像识别接口)
private String getSceneDesc(byte[] imageBytes) {
List<String> sceneTags = hardwareManager.getImageRecognizer().recognizeScene(imageBytes);
return sceneTags.isEmpty() ? "老人日常活动" : String.join(",", sceneTags);
}
// 辅助方法:触发跌倒干预(关联模块4场景逻辑)
private void triggerFallIntervention(Caps decisionCaps) {
// 调用模块4的跌倒干预方法,传入决策参数
FallInterventionManager.startIntervention(
decisionCaps.getLong("FALL_TIME"),
decisionCaps.getBoolean("NEED_EMERGENCY_CALL")
);
}
核心功能与场景价值
在居家养老“主动守护”中,消息通信是“数据上行(采集→决策)”与“指令下行(决策→干预)”的关键链路,核心价值体现在:
- 数据上行(眼镜端→大模型/移动端):以二进制流格式传输场景感知数据(如老人姿态图像),通过sendBinaryData方法标注数据类型(如“SCENE_IMAGE”),便于接收端精准解析,适配“跌倒图像传大模型判定”的需求;
- 指令下行(大模型/移动端→眼镜端):通过StructuredDataListener监听结构化数据(Caps格式),解析指令类型(如“FALL_ALERT”)并触发对应操作——如接收“跌倒预警”指令时,调用SDK硬件控制接口触发眼镜端声光提醒,实现“决策-干预”闭环
硬件数据采集
核心技术依赖
本模块基于Rokid CXR-S SDK的HardwareManager类开发,该类是官方定义的“硬件资源统一访问入口”,核心技术支撑包括:
- 多硬件统一管理:支持调用摄像头、IMU传感器、扬声器、触控传感器、显示屏等养老场景关键硬件;
- 硬件参数标准化:提供统一的参数配置接口(如摄像头分辨率、IMU采样频率),避免直接操作底层硬件导致兼容性问题;
- 隐私保护内置工具:集成ImageProcessor类,支持图像脱敏(面部模糊、隐私区域遮挡),符合养老场景数据安全要求。
核心逻辑链路
核心逻辑:“多硬件初始化→场景图像采集→IMU姿态监测→交互硬件响应→闲置功耗控制”,贴合养老场景低操作门槛、高隐私性需求:
// 1. 初始化硬件管理器(官方唯一实例获取方式,禁止多实例创建)
HardwareManager hardwareManager = new HardwareManager();
// 2. 初始化核心硬件实例(养老场景高频使用)
CameraCapture camera = hardwareManager.getCameraCapture(); // 摄像头
IMUSensor imuSensor = hardwareManager.getIMUSensor(); // IMU传感器
TouchSensor touchSensor = hardwareManager.getTouchSensor(); // 触控传感器(镜腿按键)
ImageProcessor imageProcessor = hardwareManager.getImageProcessor(); // 图像脱敏工具
// 3. 摄像头配置:适配养老场景(低功耗+隐私保护)
private void initCamera() {
// 设置分辨率:日常采集720P(平衡清晰度与功耗),跌倒采集1080P(高清晰度便于判定)
camera.setResolution(Resolution.RES_720P);
// 设置帧率:5帧/秒(避免高频采集耗电,文档《功耗优化》4.1节推荐)
camera.setFrameRate(5);
// 开启自动弱光适配(5lux环境可清晰成像,适配老人卧室、客厅等场景)
camera.enableLowLightAdaptation(true);
Log.d("Hardware", "摄像头初始化完成,默认分辨率720P,帧率5帧/秒");
}
// 4. IMU传感器配置:跌倒姿态监测专用
private void initIMUSensor() {
// 设置采样频率:100Hz(满足跌倒姿态快速捕捉,文档《IMU使用指南》3.2节)
imuSensor.setSampleRate(100);
// 设置姿态监测范围:倾斜角度-90°~90°(覆盖老人站立、跌倒、静坐等姿态)
imuSensor.setTiltAngleRange(-90, 90);
// 注册姿态数据监听器(核心:识别跌倒疑似姿态)
imuSensor.setIMUDataListener(imuData -> {
// 养老场景跌倒疑似判定:倾斜角度>45° + 垂直加速度突变>2.0m/s²
boolean isSuspectedFall = imuData.getPitch() > 45
&& Math.abs(imuData.getLinearAccelY()) > 2.0;
if (isSuspectedFall) {
// 切换摄像头至1080P,采集跌倒高清图像(调用模块2传输至大模型)
camera.setResolution(Resolution.RES_1080P);
List<byte[]> fallImages = captureFallImages(3); // 采集3帧
messageManager.sendFallSuspectDataToAI(fallImages); // 传大模型
// 采集后恢复720P,降低功耗
camera.setResolution(Resolution.RES_720P);
}
});
}
// 5. 图像采集与脱敏(隐私保护核心步骤)
private List<byte[]> captureFallImages(int count) {
List<byte[]> imageList = new ArrayList<>();
for (int i = 0; i < count; i++) {
// 1. 采集原始图像(二进制流)
byte[] originalImage = camera.captureImageAsBytes();
// 2. 图像脱敏:面部模糊+隐私区域遮挡(如抽屉、柜子等可能含隐私的区域)
byte[] desensitizedImage = imageProcessor.desensitize(
originalImage,
ImageDesensitizeType.FACE_BLUR, // 面部模糊
ImageDesensitizeType.PRIVACY_AREA_COVER // 隐私区域遮挡
);
imageList.add(desensitizedImage);
try { Thread.sleep(500); } catch (InterruptedException e) {} // 间隔0.5秒,避免重复帧
}
return imageList;
}
// 6. 触控传感器监听:老人响应操作(镜腿按键)
private void initTouchSensor() {
// 短按:确认跌倒提醒/关闭声光提醒(适配老人手指不灵活,避免长按操作)
touchSensor.setShortPressListener(() -> {
if (isFallAlertActive()) { // 判断是否正在进行跌倒提醒
FallInterventionManager.confirmResponse(); // 确认响应,停止提醒
hardwareManager.getDisplay().showToast("已确认,正在联系家属", 3);
}
});
// 双击:紧急呼叫(备用操作,避免误触)
touchSensor.setDoubleTapListener(() -> {
hardwareManager.getPhoneModule().dialEmergencyContact("138xxxx1234");
});
}
// 7. 闲置硬件功耗控制(养老场景核心优化)
private void controlIdlePower() {
// 监听老人活动状态:10分钟无姿态变化(静坐/睡眠),关闭摄像头
new Thread(() -> {
while (true) {
try { Thread.sleep(600000); } catch (InterruptedException e) {} // 10分钟检测一次
if (imuSensor.isNoMovementDetected(600)) { // 600秒(10分钟)无姿态变化
if (camera.isCapturing()) {
camera.stopCapture();
Log.d("Hardware", "10分钟无活动,已关闭摄像头降低功耗");
}
} else {
// 有活动时恢复摄像头采集
if (!camera.isCapturing()) {
camera.startCapture();
}
}
}
}).start();
}
// 辅助方法:判断是否正在进行跌倒提醒
private boolean isFallAlertActive() {
return FallInterventionManager.isInterventionActive();
}
核心功能与场景价值
硬件数据是“主动沉浸式守护”的“数据源”,所有决策与干预均依赖采集的实景、姿态数据,核心价值体现在:
- 场景图像采集:通过HardwareManager获取CameraCapture实例,调用captureImageAsBytes方法以二进制流格式返回采集图像——该格式符合SDK传输规范,可直接通过MessageManager上传至大模型,为“跌倒识别”“远程场景化关怀”提供原始数据支撑,且规避“硬件调用权限不足”的兼容性问题。
- 姿态数据监测:通过IMU传感器获取老人倾斜角度、加速度变化,快速识别“跌倒疑似姿态”;
- 交互硬件控制:通过触控传感器监听镜腿按键(老人响应操作)、显示屏/扬声器输出提醒(干预反馈),实现“采集-交互-反馈”闭环。
场景落地实现
核心技术依赖
应用层作为技术模块与养老服务的“转化枢纽”,严格依托Rokid CXR-S SDK三大核心能力构建:
- 设备协同能力:基于DeviceConnector类实现眼镜端与移动端(CXR-M SDK)的连接状态监听、ARTC传输健康度监测,保障跨端数据稳定流转;
- 数据交互能力:通过MessageManager类的“Caps结构化数据+二进制流”双传输模式,实现“眼镜端→大模型→移动端”的指令与场景数据互通;
- 硬件控制能力:借助HardwareManager类统一调用摄像头、扬声器、触控传感器等硬件,所有操作均遵循SDK“硬件资源标准化访问”规范,无直接操作底层设备的自定义逻辑。
核心逻辑链路
跌倒风险主动干预
逻辑思路:“IMU监测异常姿态→采集跌倒疑似图像→SDK传大模型判定→触发眼镜声光提醒+移动端预警→无响应联动紧急联系人”,每一步均基于SDK接口实现:
// 1. 初始化SDK核心实例(复用前序模块,确保统一)
DeviceConnector deviceConnector = new DeviceConnector();
MessageManager messageManager = new MessageManager(deviceConnector);
HardwareManager hardwareManager = new HardwareManager();
// 2. 获取硬件实例(SDK标准化调用)
IMUSensor imuSensor = hardwareManager.getIMUSensor(); // 姿态传感器
CameraCapture camera = hardwareManager.getCameraCapture(); // 摄像头
Speaker speaker = hardwareManager.getSpeaker(); // 扬声器
Display display = hardwareManager.getDisplay(); // 镜片显示
// 3. IMU监测:识别跌倒疑似姿态(基于养老场景阈值)
imuSensor.setIMUDataListener(data -> {
// 官方传感器数据格式:pitch(倾斜角度)、linearAccelY(垂直加速度)
boolean isSuspectedFall = data.getPitch() > 45 && Math.abs(data.getLinearAccelY()) > 2.0;
if (isSuspectedFall) {
// 4. 采集3帧图像(间隔0.5秒,避免单帧误判)
List<byte[]> fallImages = new ArrayList<>();
for (int i = 0; i < 3; i++) {
fallImages.add(camera.captureImageAsBytes()); // 二进制流格式(SDK默认)
try { Thread.sleep(500); } catch (InterruptedException e) {}
}
// 5. 传大模型:用Caps封装数据(官方结构化格式)
Caps fallData = new Caps();
fallData.putByteArrayArray("FALL_IMAGES", fallImages.toArray(new byte[0][]));
fallData.putString("DATA_TYPE", "FALL_SUSPECT");
messageManager.sendStructuredData(fallData, "AI_MODEL_CHANNEL");
// 6. 监听大模型决策结果
messageManager.setStructuredDataListener("AI_MODEL_CHANNEL", resultCaps -> {
if ("CONFIRMED".equals(resultCaps.getString("FALL_RESULT"))) {
// 7. 眼镜端干预:声光提醒(SDK硬件控制)
speaker.playVoice("您是否跌倒?需要帮助吗?", 60); // 60分贝适配老人听力
display.showAlert("跌倒提醒", "按镜腿键或语音回应", 15); // 显示15秒
// 8. 移动端预警:同步脱敏图像(符合官方隐私规范)
Caps notifyCaps = new Caps();
notifyCaps.putString("EVENT_TYPE", "FALL_ALERT");
notifyCaps.putByteArray("THUMBNAIL", desensitizeImage(fallImages.get(0)));
messageManager.sendStructuredData(notifyCaps, "MOBILE_CHANNEL");
// 9. 无响应联动紧急联系人
new Thread(() -> {
try { Thread.sleep(15000); } catch (InterruptedException e) {}
if (!isOldManResponded()) {
hardwareManager.getPhoneModule().dialEmergencyContact("138xxxx1234");
}
}).start();
}
});
}
});
// 辅助:图像脱敏(调用SDK内置隐私工具)
private byte[] desensitizeImage(byte[] original) {
return hardwareManager.getImageProcessor().desensitize(original, ImageDesensitizeType.FACE_BLUR);
}
// 辅助:判断老人响应(SDK触控/语音接口)
private boolean isOldManResponded() {
return hardwareManager.getTouchSensor().isShortPressed()
|| "需要".equals(hardwareManager.getVoiceRecognizer().getLastResult());
}
远程场景化关怀
逻辑思路:“家属移动端发指令→SDK传眼镜端→采集实时图像→压缩传输至移动端→家属发语音提醒→眼镜端播放”,全程依托SDK双向通信能力:
// 1. 监听移动端指令(CXR-M SDK通过MOBILE_CHANNEL发送)
messageManager.setStructuredDataListener("MOBILE_CHANNEL", mobileCaps -> {
String command = mobileCaps.getString("COMMAND");
if ("REQUEST_SCENE_STATUS".equals(command)) {
// 2. 连续采集图像(1帧/秒,平衡功耗与清晰度)
camera.startContinuousCapture(1);
camera.setContinuousCaptureListener(frameBytes -> {
// 3. 压缩图像(SDK优化接口,适配居家网络)
byte[] compressedFrame = hardwareManager.getImageProcessor().compress(frameBytes, 50);
// 4. 回传移动端:ARTC差时补文字描述(官方传输保障)
Caps feedbackCaps = new Caps();
feedbackCaps.putString("TYPE", "SCENE_FRAME");
feedbackCaps.putByteArray("FRAME", compressedFrame);
if (deviceConnector.getARTCHealthScore() < 60) {
feedbackCaps.putString("DESC", getSceneDesc(frameBytes)); // 场景文字标签
}
messageManager.sendStructuredData(feedbackCaps, "MOBILE_CHANNEL");
});
}
// 5. 处理家属语音提醒指令
if ("SEND_VOICE_REMIND".equals(command)) {
String remindText = mobileCaps.getString("VOICE_TEXT");
// SDK文本转语音(适配老人听觉:女声、55分贝)
speaker.playTTS(remindText, "female", 55);
}
});
// 辅助:生成场景描述(调用SDK图像识别接口)
private String getSceneDesc(byte[] frame) {
List<String> tags = hardwareManager.getImageRecognizer().recognizeScene(frame);
return tags.isEmpty() ? "老人正常活动" : String.join(",", tags);
}
核心功能与场景价值
应用层聚焦居家养老两大高频需求,将技术模块能力转化为“可感知、可落地”的守护服务:
- 跌倒风险主动干预:无需老人手动触发,通过“IMU姿态监测→图像采集→大模型判定→多端救援”闭环,解决传统养老“跌倒后无法及时呼救”的痛点;
- 远程场景化关怀:家属通过移动端发起指令,即可获取老人居家实景画面(非抽象文字),并实现“查看→语音提醒”双向交互,缓解“远程担忧却无实景参考”的焦虑。
总结:CXR-S SDK为核心的养老技术生态价值
Rokid CXR-S SDK通过构建"硬件感知-数据传输-智能决策-多端协同"的完整技术闭环,为居家养老领域带来了革命性的突破。这一技术架构成功解决了传统养老方案中的两大核心痛点:被动响应机制导致的救援延迟,以及数据孤岛造成的关怀断层。
在技术实现层面,CXR-S SDK作为连接AR硬件与大模型的关键枢纽,实现了从实景数据采集到智能干预的无缝衔接。通过标准化的数据通道和双向通信机制,不仅保障了老人安全数据的实时可靠传输,更实现了家属与老人之间的沉浸式互动关怀。特别是在跌倒检测、远程关怀等核心场景中,展现了技术赋能养老服务的实际价值。
从行业视角来看,这一技术方案的意义在于:
- 标准化开发范式:为AR+养老应用提供了可复用的技术底座
- 场景化落地路径:将前沿技术转化为切实可用的养老服务
- 生态化协同模式:打通硬件、算法、应用之间的壁垒,形成完整价值链
展望未来,随着5G、边缘计算等技术的深度融合,基于CXR-S SDK的居家养老解决方案将进一步提升实时性、降低功耗、增强隐私保护,为智慧养老产业树立新的技术标准。这不仅是一次技术升级,更是对传统养老模式的重构——让科技真正服务于人的福祉,实现"技术有温度,关怀无距离"的养老新范式。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 29
29 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)