K8S环境中Containerd运行时占用文件定位清理
是 containerd 使用 作为存储驱动时,用于管理容器和镜像文件系统 的核心位置。
目录
/var/lib/containerd/io.containerd.snapshotter.v1.overlayfs是 containerd 使用 OverlayFS 作为存储驱动时,用于管理容器和镜像文件系统快照 的核心位置。
1. 目录结构
下面这个表格汇总了该目录下关键组件的作用,可快速建立整体概念。
|
组件/目录 |
作用描述 |
|---|---|
|
|
核心目录,存储所有快照层。每个数字子目录(如 |
|
|
快照的实际数据目录。对于镜像层(Committed状态),存放只读文件;对于容器层(Active状态),存放容器写入的新数据。 |
|
|
OverlayFS 的工作目录,用于在联合挂载时保证文件操作的原子性(如文件重命名)。切勿手动修改。 |
|
|
存储所有快照的元数据(如父子关系、创建时间),通常基于 BoltDB。 |
2. 核心概念与工作原理
了解了目录结构后,我们来看看 containerd 是如何利用这些组件工作的。
-
快照与分层:containerd 中的 快照 代表了文件系统在某个时间点的状态。每个镜像层都会对应一个 committed 状态的只读快照。当创建一个容器时,会基于最上层的镜像快照生成一个 active 状态的可读写快照,容器内所有修改都发生在这个可读写层。
-
联合挂载:当容器启动时,OverlayFS 驱动会将多个只读的镜像层(对应
lowerdir)和容器唯一的可读写层(对应upperdir)联合挂载到一个统一的视图(merged目录),容器进程看到的文件系统就是这个联合后的结果。
3. 日常管理与排查
掌握上述知识能帮助你解决实际问题,比如定位大文件或关联路径与容器。
3.1 定位大文件目录
当磁盘空间紧张时,可以查看 snapshots目录下各子目录的大小,找出占用空间大的快照。
sudo du -h -d 1 /var/lib/containerd/io.containerd.snapshotter.v1.overlayfs/snapshots | sort -hr
或crictl stats 命令查看
#查看所有容器
crictl stats
#或查看指定容器
crictl stats <container-id-1> <container-id-2>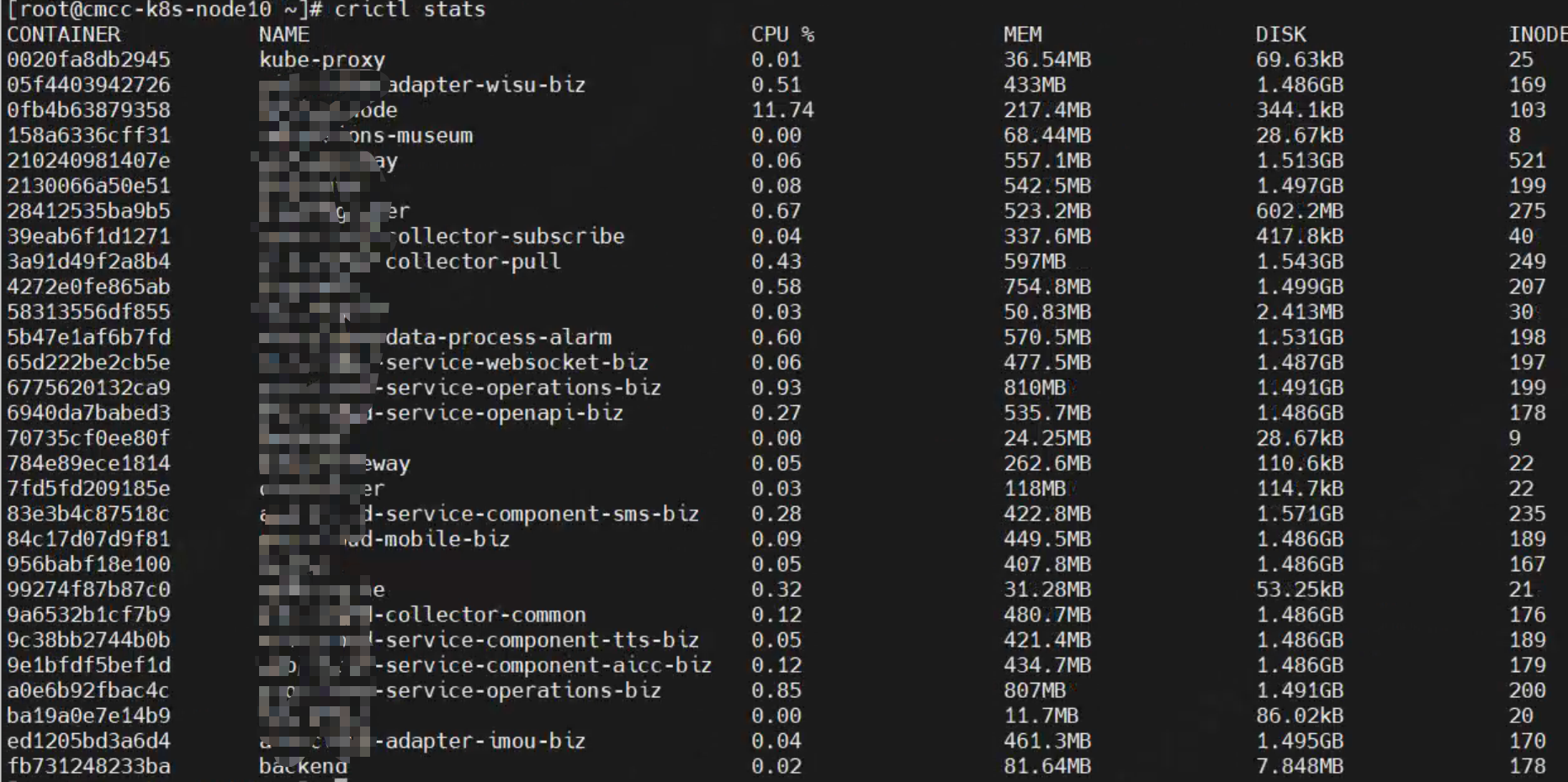
3.2 关联快照与容器
找到占用大的数字目录(如 247)后,可以通过 mount命令查找其挂载信息,从而关联到具体的容器。
mount | grep /var/lib/containerd/io.containerd.snapshotter.v1.overlayfs/snapshots/247/
命令输出会显示包含容器ID的挂载点路径(通常在 /run/containerd/io.containerd.runtime.v2.task/...下),然后可以使用 crictl或 ctr命令通过该容器ID查看容器详情,即可找到对应的服务模块容器名称。
crictl ps | grep 容器ID前几位
或者
crictl ps -v | grep -A10 <完整容器ID或前几位>
3.3 安全清理
切勿直接手动删除 snapshots目录下的子目录或文件,这可能导致数据不一致。正确的清理方式是使用容器运行时工具:
# 使用 ctr 删除不需要的容器和镜像
ctr containers list
ctr containers rm <container_id>
ctr images rm <image_name>
# 或者使用 crictl (适用于 Kubernetes 环境)
crictl rmi <image_id>删除不再使用的容器和镜像后,其关联的未被引用的快照层通常可以被垃圾回收机制清理。
4. 与Docker的主要区别
简单来说,Docker 的 overlay2和 containerd 的 io.containerd.snapshotter.v1.overlayfs都使用 OverlayFS,但 containerd 的快照管理抽象更清晰,与运行时的耦合度更低。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 9
9 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)