ERNIE 4.5+Hardware ——为台球领域注入AI新活力
技术揭秘:如何用边缘计算+三核AI打造"球域灵眸"智能台球教练
摘要:本文将深入解析"球域灵眸"AI台球训练系统的技术架构。我们将探讨如何在一个低功耗的边缘设备(NVIDIA Jetson Nano)上,集成PP-YOLO-E高精度检测、ERNIE 0.3B本地语音交互以及ERNIE-4.5-VL云端多模态分析,构建一套端云协同的实时体育训练系统。
1. 项目背景:当台球遇上AI
台球是一项对精度、几何计算和心理素质要求极高的运动。传统的台球训练往往依赖于教练的经验指导和学员的反复练习,存在反馈滞后、数据缺失、成本高昂等痛点。
试想这样一个场景:一位台球爱好者独自在球房练习,他反复尝试一个长台进攻,却总是打不进。他不知道是瞄准点偏了,还是出杆不直,亦或是力度没控制好。没有教练在旁,这种"无效练习"可能持续数小时,甚至养成错误的肌肉记忆。
“球域灵眸” (AI Billiards) 项目正是为了解决这一痛点而生。我们旨在通过计算机视觉和人工智能技术,将台球桌数字化。我们的目标是打造一个"看不见但无处不在"的AI教练,它能看懂你的每一次击球,听懂你的每一个问题,并给出专业级的指导。它不仅能告诉你"没打进",还能告诉你"为什么没打进"以及"怎么打才能进"。
2. 核心挑战与架构设计
在设计之初,我们面临三个主要技术挑战:
- 实时性:击球瞬间的捕捉和路径规划必须在毫秒级完成。球体运动速度可达 3-5 m/s,如果系统延迟超过 50ms,投影出的辅助线就会产生明显的"拖影"或滞后,严重影响体验。
- 交互性:用户在打球时双手被球杆占用,无法操作手机或键盘。且台球厅环境嘈杂,远场语音识别的准确率是极大的考验。
- 算力限制:为了降低部署成本,系统需运行在Jetson Nano这种边缘设备上(4GB 显存,128 CUDA 核心),算力非常有限。要在这种设备上同时跑视觉检测和语音识别,无异于"螺蛳壳里做道场"。
为了解决这些问题,我们设计了独特的 “端云协同 + 三核AI” 架构:
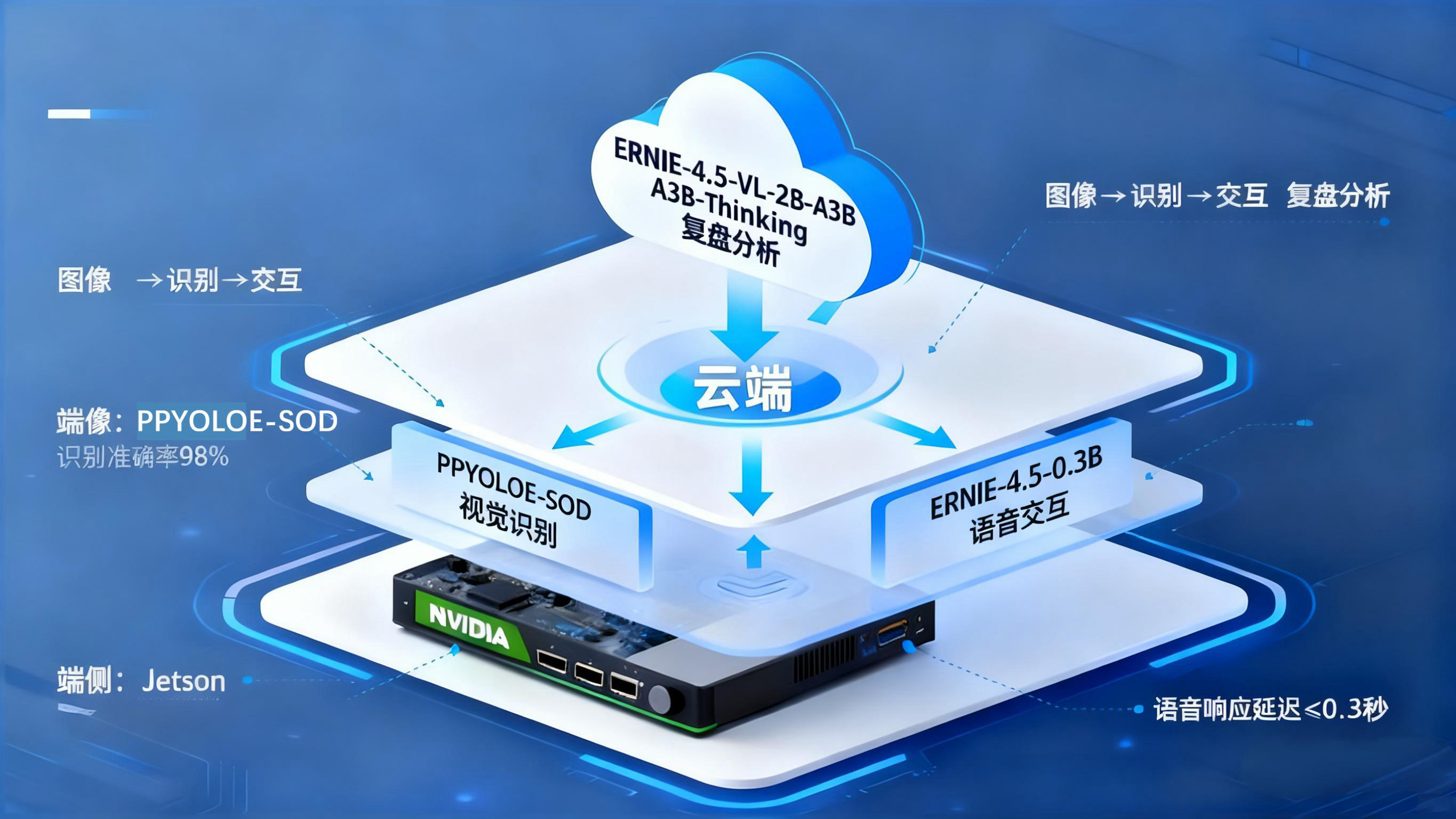
2.1 三核AI模型矩阵
系统并没有依赖单一的大模型,而是根据任务特性,调度了三个不同量级的AI模型,形成了一个分工明确的"智能团队":
| 模型角色 | 模型名称 | 部署位置 | 任务 | 特性 |
|---|---|---|---|---|
| “眼睛” | PP-YOLO-E Billiard SOD | 端侧 (Edge) | 目标检测、轨迹追踪 | 45 FPS, 针对小目标优化, 负责"看" |
| “嘴巴” | ERNIE 4.5 0.3B | 端侧 (Edge) | 语音识别、指令理解 | <100ms 响应, 纯本地运行, 负责"听" |
| “大脑” | ERNIE-4.5-VL 28B | 云端 (Cloud) | 战术分析、复盘报告 | 多模态理解, 深度推理, 负责"想" |
3. 关键技术解析
3.1 视觉中枢:PP-YOLO-E 台球专用检测
在台球场景中,球体在画面中占比极小(Small Object),通常仅占全画面的 0.1% 左右。此外,现场环境复杂,存在球体遮挡、台呢反光、球杆阴影以及高速运动产生的模糊等干扰。通用的 YOLOv5 或 YOLOv8 模型在未经针对性优化的情况下,往往会出现漏检或误检(例如将球袋误识别为黑球)。
我们采用了百度PaddleDetection的 PP-YOLO-E 架构,并进行了深度的定制化开发:
- 数据集构建:我们采集了不同光照、不同角度下的台球桌图像 3000 余张,并使用 LabelImg 进行了精细标注。特别针对"球体粘连"(两球紧贴)和"高速运动"场景进行了专项数据增强(Mixup, Mosaic)。
- SOD (Small Object Detection) 优化:
- Anchor 调整:根据台球在 1080P 画面中的平均像素直径(约 25-30px),重新聚类了 Anchor Box 的尺寸,使其更贴合球体大小。
- FPN 结构优化:增强了浅层特征图的权重,因为小目标的特征主要保留在浅层网络中。
- CSPResNet Backbone:在保持轻量化的同时提取更丰富的特征,相比 MobileNetV3,它对小目标的特征提取能力更强。
- TensorRT 加速:这是在 Jetson Nano 上实现实时的关键。我们使用 Paddle2ONNX 将模型导出为 ONNX 格式,再利用 TensorRT 的 FP16 混合精度量化技术进行编译。最终,推理速度从原生的 15 FPS 飙升至 45 FPS,完全满足了实时轨迹追踪的需求。
# 核心检测代码片段:展示了如何调用优化后的模型
from core.detection.ppyoloe_ball_detector import PPYOLOEBallDetector
# 初始化检测器,加载 TensorRT 引擎
detector = PPYOLOEBallDetector(
config_path="models/ppyoloe/ppyoloe_billiard_sod.yml",
weights_path="models/ppyoloe/ppyoloe_billiard_sod.pdparams",
device="gpu:0",
threshold=0.5 # 针对台球场景调整的置信度阈值
)
# 毫秒级返回16类球体坐标 (0-15: 白球, 黑八, 花色球等)
# detections 包含: [class_id, score, x_min, y_min, x_max, y_max]
detections = detector.detect(frame)
3.2 交互中枢:ERNIE 0.3B 本地语音AI
为了实现"像和真人教练对话一样"的体验,语音交互的延迟必须控制在无感范围内(<500ms)。传统的云端语音识别方案(ASR -> Cloud LLM -> TTS)受网络波动影响极大,且在台球厅这种嘈杂环境下,识别率往往不尽如人意。因此,我们选择了 ERNIE 4.5 0.3B 轻量级大模型进行全本地部署。
- LoRA 微调 (Low-Rank Adaptation):通用的语音模型往往听不懂"斯诺克"、“K球”、“高杆”、“扎杆"等专业术语。我们构建了包含 5000 条台球指令的专用数据集,对 ERNIE 0.3B 进行了 LoRA 微调。这使得模型在保持通用对话能力的同时,成为了一个"台球行家”。
- INT8 极致量化:Jetson Nano 仅有 4GB 显存,而操作系统和视觉模型已经占用了近 2GB。为了塞进这个"大"模型,我们将 ERNIE 0.3B 进行了 INT8 量化,将显存占用从 1.2GB 压缩至 689MB,同时推理延迟压缩至 100ms 以内,实现了真正的"即问即答"。
- 同音字纠错 (Homophone Correction):针对中文语音识别中常见的同音字错误,我们引入了基于规则的
HomophoneMapper模块。- 例如:用户说"帮我复盘",ASR 可能识别为"帮我富盘";用户说"打进黑八",可能识别为"大劲黑八"。
- 我们的纠错模块会在 LLM 处理前,利用上下文和领域词典自动修正这些错误,显著提升了指令识别的准确率。
# 意图识别逻辑示例
def parse_intent(text):
# 1. 预处理与纠错
corrected_text = homophone_mapper.correct(text)
# 2. 本地 LLM 推理
response = ernie_bot.chat(corrected_text)
# 3. 结构化指令提取
if "复盘" in response:
return {"action": "analyze_shot", "mode": "comprehensive"}
elif "摆球" in response:
return {"action": "reset_balls", "pattern": "triangle"}
return {"action": "chat", "content": response}
3.3 决策中枢:ERNIE-4.5-VL 云端多模态分析
当用户需要深度复盘时,端侧算力就显得捉襟见肘。此时,系统会将击球前后的关键帧(Keyframes)以及物理引擎计算出的球体轨迹数据(Trajectory Data)打包上传至云端,调用 ERNIE-4.5-VL。
这是一个拥有280亿参数的超大规模多模态模型,它不仅能"看"懂球局图片(识别球型分布),还能结合物理数据进行深度推理。我们设计了专门的 Prompt Template,引导模型生成结构化的五维分析报告:
- 路径规划评分 (Path Planning):你的线路选择是否合理?是否存在风险更低、走位更好的选择?
- 技术执行评分 (Execution):实际击球点与理论击球点的偏差是多少?是否存在发力过猛或杆法使用不当?
- 战术意识 (Tactical Awareness):是否考虑了下一杆的走位(Positioning)?是否为对手留下了防守障碍(Snooker)?
- 心理状态 (Psychology):根据击球前的瞄准时长和运杆节奏,判断用户是否犹豫或紧张。
- 改进建议 (Coaching):基于大数据的个性化训练方案,例如"建议多练习中距离直线球的低杆刹车"。
云端返回的分析报告示例 (JSON):
{
"shot_id": "20251122_102433",
"scores": {
"accuracy": 85,
"positioning": 60,
"choice": 90
},
"analysis": "这杆球虽然打进了,但是力度过大,导致母球贴库,增加了下一杆的难度。",
"suggestion": "建议使用中低杆,力度控制在3成左右,利用吃库后的反弹将母球停在球台中央区域。",
"diagram_url": "https://cloud-storage/path/to/overlay_image.jpg"
}
这种"端侧实时响应 + 云端深度思考"的模式,既保证了用户体验的流畅性,又提供了专业级的教学深度。
4. 软硬件协同与工程化
除了算法模型,工程化落地也是本项目的亮点,特别是在坐标映射和系统架构方面:
- 高精度投影校准 (Calibration):
- 为了将计算出的路径精准地"画"在球桌上,我们需要建立摄像机坐标系、投影仪坐标系和物理世界坐标系之间的映射关系。
- 我们开发了一套自动校准程序,通过投影特定的棋盘格图案,利用 OpenCV 计算单应性矩阵 (Homography Matrix)。即使投影仪位置发生微小偏移,也能在 10 秒内完成重新校准,误差控制在 2mm 以内。
- 异步多线程架构:
- 系统采用 Flask 作为主控后端,利用 SocketIO 实现前后端实时通信。
- 视觉线程:以 45FPS 运行,只负责检测和坐标转换,将结果写入共享内存队列。
- 语音线程:独立监听麦克风,一旦检测到唤醒词(“小度小度"或"教练”),立即打断当前操作进行响应。
- 投影线程:从队列读取最新的球体坐标,实时渲染辅助线和特效。
- 这种解耦设计确保了即使语音模型正在思考,视觉追踪也不会有丝毫卡顿。
- 模块化设计:
core/detection: 视觉感知层,封装了 PP-YOLO-E 的推理细节。core/voice_ai: 交互层,包含 ASR、LLM 和 TTS 模块。core/ai_coach: 认知层,负责整合多模态信息进行决策。billiards_ai/planning: 物理计算层,包含碰撞检测和反弹路径算法。
5. 总结与展望
"球域灵眸"项目展示了 边缘AI (Edge AI) 在体育科技领域的巨大潜力。通过合理的模型选型(PP-YOLO-E + ERNIE 0.3B)和创新的端云协同架构,我们证明了在低成本硬件(Jetson Nano)上也能实现专业级的智能训练体验。这不仅降低了智能体育设备的门槛,也为其他实时性要求高的 AIOT 应用提供了参考范式。
未来,我们将继续探索:
- 姿态估计 (Pose Estimation):引入人体关键点检测模型,分析用户的站姿、握杆手势和运杆平顺度,从生物力学角度预防运动损伤。
- AR眼镜对接:摆脱投影仪的光线限制,将辅助线直接显示在用户佩戴的 AR 眼镜中,实现更自由的视角。
- 强化学习 (Reinforcement Learning):训练一个能自我对弈的 AI Agent,探索人类未曾发现的顶级解球思路,甚至挑战职业选手的战术布局。
模型库:https://aistudio.baidu.com/modelsdetail/40012/intro
数据集:https://aistudio.baidu.com/dataset/detail/361590/intro
项目开源地址:https://aistudio.baidu.com/projectdetail/9774059 (示例链接)
技术栈:Python 3.8, PaddlePaddle 2.6, TensorRT 8.0, Flask, Vue.js, NVIDIA Jetson Nano
作者:bluse鑫
日期:2025年11月22日

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 6
6 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)