YOLOv11改进 - 卷积Conv | AAAI 2025顶会PConv(Pinwheel-shaped Conv): 风车状卷积用于红外小目标检测
本文介绍了风车状卷积(PConv)和基于尺度的动态(SD)损失在YOLOv11中的结合应用。PConv采用不对称填充,通过特殊结构设计、卷积运算和分组卷积技术,能更好地适应红外小目标的像素高斯空间分布,在少量增加参数的情况下极大扩展感受野。SD损失可根据目标大小动态调整尺度和位置损失的影响。我们将PConv集成到YOLOv11的主干网络低层,并在相关配置文件中进行设置。实验证明,YOLOv11 -
前言
本文介绍了风车状卷积(PConv)和基于尺度的动态(SD)损失在YOLOv11中的结合应用。PConv采用不对称填充,通过特殊结构设计、卷积运算和分组卷积技术,能更好地适应红外小目标的像素高斯空间分布,在少量增加参数的情况下极大扩展感受野。SD损失可根据目标大小动态调整尺度和位置损失的影响。我们将PConv集成到YOLOv11的主干网络低层,并在相关配置文件中进行设置。实验证明,YOLOv11 - PConv在IRSTD - 1K和SIRST - UAVB数据集上取得显著性能提升,验证了方法的有效性和泛化能力。
文章目录: YOLOv11改进大全:卷积层、轻量化、注意力机制、损失函数、Backbone、SPPF、Neck、检测头全方位优化汇总
专栏链接: YOLOv11改进专栏
介绍
摘要
近年来,基于卷积神经网络(CNN)的方法在红外小目标检测领域展现出卓越性能。不过,这些方法大多采用标准卷积,未充分考量红外小目标像素分布的空间特征。鉴于此,我们提出一种新型的风车形卷积(PConv),用以替代主干网络低层的标准卷积。PConv能够更好地契合微弱小目标像素的高斯空间分布,在增强特征提取效果、显著增大感受野的同时,仅引入极少量的额外参数。此外,尽管近期的损失函数已将尺度和位置损失相结合,但未能充分考虑不同目标尺度下这些损失的敏感度差异,进而限制了对微弱小目标的检测性能。为解决该问题,我们提出基于尺度的动态(SD)损失,其可依据目标大小动态调整尺度和位置损失的影响,从而提升网络对不同尺度目标的检测能力。我们构建了新的基准数据集SIRST - UAVB,这是目前最大且最具挑战性的实景单帧红外小目标检测数据集。最后,将PConv和SD损失集成到最新的小目标检测算法中,我们在IRSTD - 1K和SIRST - UAVB数据集上均取得显著的性能提升,验证了所提方法的有效性与泛化能力。
文章链接
论文地址:论文地址
代码地址:官方代码地址
基本原理
Pinwheel - shaped Convolution(风车状卷积,简称PConv)是专门为红外小目标检测设计的一种新型卷积模块,其技术原理涵盖结构设计、卷积运算、特征融合以及优势体现等方面:
- 结构设计:PConv模块采用不对称填充方式,为图像不同区域构建水平和垂直方向的卷积核。在卷积过程中,这些卷积核呈向外扩散状态。以输入张量 X ( h 1 , w 1 , c 1 ) X^{(h_{1}, w_{1}, c_{1})} X(h1,w1,c1)为例,其中 h 1 h_{1} h1、 w 1 w_{1} w1、 c 1 c_{1} c1分别表示该张量的高度、宽度和通道大小。通过这种特殊的填充设计,PConv能够更好地适配红外小目标的像素高斯空间分布特征。
- 卷积运算过程
- 第一层并行卷积:PConv的第一层会开展4组并行卷积操作。例如, X 1 ( h ′ , w ′ , c ′ ) = S i L U ( B N ( X P ( 1 , 0 , 0 , 3 ) ( h 1 , w 1 , c 1 ) ⊗ W 1 ( 1 , 3 , c ′ ) ) ) X_{1}^{(h', w', c')}=SiLU(BN(X_{P(1,0,0,3)}^{(h_{1}, w_{1}, c_{1})} \otimes W_{1}^{(1,3, c')})) X1(h′,w′,c′)=SiLU(BN(XP(1,0,0,3)(h1,w1,c1)⊗W1(1,3,c′))) ,其中 ⊗ \otimes ⊗为卷积运算符, W 1 ( 1 , 3 , c ′ ) W_{1}^{(1,3, c')} W1(1,3,c′)是一个1×3的卷积核,输出通道数为 c ′ c' c′, P ( 1 , 0 , 0 , 3 ) P(1,0,0,3) P(1,0,0,3)为填充参数,代表在左、右、上、下方向的填充像素数量。 X 2 ( h ′ , w ′ , c ′ ) X_{2}^{(h', w', c')} X2(h′,w′,c′)、 X 3 ( h ′ , w ′ , c ′ ) X_{3}^{(h', w', c')} X3(h′,w′,c′)、 X 4 ( h ′ , w ′ , c ′ ) X_{4}^{(h', w', c')} X4(h′,w′,c′)的计算方式与之类似,仅填充参数和卷积核存在差异。经过第一层卷积后,输出特征图的高度 h ′ = h 1 s + 1 h'=\frac{h_{1}}{s}+1 h′=sh1+1,宽度 w ′ = w 1 s + 1 w'=\frac{w_{1}}{s}+1 w′=sw1+1,通道数 c ′ = c 2 4 c'=\frac{c_{2}}{4} c′=4c2,此处 c 2 c_{2} c2是PConv模块最终输出特征图的通道数, s s s为卷积步长。
- 特征图拼接:将第一层并行卷积得到的4个结果 X 1 ( h ′ , w ′ , c ′ ) X_{1}^{(h', w', c')} X1(h′,w′,c′)、 X 2 ( h ′ , w ′ , c ′ ) X_{2}^{(h', w', c')} X2(h′,w′,c′)、 X 3 ( h ′ , w ′ , c ′ ) X_{3}^{(h', w', c')} X3(h′,w′,c′)、 X 4 ( h ′ , w ′ , c ′ ) X_{4}^{(h', w', c')} X4(h′,w′,c′)进行拼接,即 X ( h ′ , w ′ , 4 c ′ ) = C a t ( X 1 ( h ′ , w ′ , c ′ ) , ⋯ , X 4 ( h ′ , w ′ , c ′ ) ) X^{(h', w', 4 c')}=Cat(X_{1}^{(h', w', c')}, \cdots, X_{4}^{(h', w', c')}) X(h′,w′,4c′)=Cat(X1(h′,w′,c′),⋯,X4(h′,w′,c′)) ,从而得到一个通道数为 4 c ′ 4c' 4c′的张量。
- 最终输出计算:使用一个大小为 2 × 2 2×2 2×2、通道数为 c 2 c_{2} c2的卷积核对拼接后的张量进行无填充卷积操作。最终输出特征图的高度 h 2 = h ′ − 1 = h 1 s h_{2}=h' - 1=\frac{h_{1}}{s} h2=h′−1=sh1,宽度 w 2 = w ′ − 1 = w 1 s w_{2}=w' - 1=\frac{w_{1}}{s} w2=w′−1=sw1 ,计算公式为 Y ( h 2 , w 2 , c 2 ) = S i L U ( B N ( X ( h ′ , w ′ , 4 c ′ ) ⊗ W ( 2 , 2 , c 2 ) ) ) Y^{(h_{2}, w_{2}, c_{2})}=SiLU(BN(X^{(h', w', 4 c')} \otimes W^{(2,2, c_{2})})) Y(h2,w2,c2)=SiLU(BN(X(h′,w′,4c′)⊗W(2,2,c2)))。这种设计使得PConv模块在输出特征图时,能够将高度和宽度调整至预设值,并且可与普通卷积层进行互换。
- 感受野与参数优化:PConv模块运用分组卷积技术,在扩大感受野的同时,有效控制了参数数量的增长。以 3 × 3 3×3 3×3的普通卷积与PConv(3,3)进行对比,当普通卷积的输出通道数 c 2 c_{2} c2等于输入通道数 c 1 c_{1} c1时,普通卷积的参数数量为 9 c 1 2 9c_{1}^{2} 9c12 ,而PConv(3,3)的参数数量为 7 c 1 2 7c_{1}^{2} 7c12,相比之下,PConv(3,3)的参数减少了22.2% ,但感受野却增加了177%。在实际应用场景(如YOLO系列网络)中,当 c 2 = 4 c 1 c_{2}=4c_{1} c2=4c1时,普通卷积需要 36 c 1 2 36c_{1}^{2} 36c12个参数,PConv(3,3)需要 72 c 1 2 72c_{1}^{2} 72c12个参数,此时PConv(3,3)的感受野增加了178% ,参数仅增加111% 。同样,PConv(4,4)相较于普通卷积,感受野增加444%,参数仅增加122% 。这表明PConv能够在少量增加参数的情况下,大幅扩展感受野,高效提升对红外小目标底层特征的提取能力。
- 对红外小目标检测的优势:由于红外小目标在图像中的像素分布呈现高斯特性,PConv模块特殊的结构和运算方式能够更好地与之契合。通过实验对比PConv与普通卷积的输出结果可知,PConv可以增强红外小目标与背景之间的对比度,同时有效抑制杂波信号,进而更精准地提取红外小目标的特征,为后续的检测任务提供有力支撑。
核心代码
import torch
import torch.nn as nn
import torch.nn.functional as F
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
class PConv(nn.Module):
''' Pinwheel-shaped Convolution using the Asymmetric Padding method. '''
def __init__(self, c1, c2, k, s):
super().__init__()
# self.k = k
p = [(k, 0, 1, 0), (0, k, 0, 1), (0, 1, k, 0), (1, 0, 0, k)]
self.pad = [nn.ZeroPad2d(padding=(p[g])) for g in range(4)]
self.cw = Conv(c1, c2 // 4, (1, k), s=s, p=0)
self.ch = Conv(c1, c2 // 4, (k, 1), s=s, p=0)
self.cat = Conv(c2, c2, 2, s=1, p=0)
def forward(self, x):
yw0 = self.cw(self.pad[0](x))
yw1 = self.cw(self.pad[1](x))
yh0 = self.ch(self.pad[2](x))
yh1 = self.ch(self.pad[3](x))
return self.cat(torch.cat([yw0, yw1, yh0, yh1], dim=1))
class APC2f(nn.Module):
"""Faster Implementation of APCSP Bottleneck with Asymmetric Padding convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, P=True, g=1, e=0.5):
"""Initialize CSP bottleneck layer with two convolutions with arguments ch_in, ch_out, number, shortcut, groups,
expansion.
"""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
if P:
self.m = nn.ModuleList(APBottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
else:
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through APC2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
class APBottleneck(nn.Module):
"""Asymmetric Padding bottleneck."""
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
"""Initializes a bottleneck module with given input/output channels, shortcut option, group, kernels, and
expansion.
"""
super().__init__()
c_ = int(c2 * e) # hidden channels
p = [(2,0,2,0),(0,2,0,2),(0,2,2,0),(2,0,0,2)]
self.pad = [nn.ZeroPad2d(padding=(p[g])) for g in range(4)]
self.cv1 = Conv(c1, c_ // 4, k[0], 1, p=0)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
"""'forward()' applies the YOLO FPN to input data."""
return x + self.cv2((torch.cat([self.cv1(self.pad[g](x)) for g in range(4)], 1))) if self.add else self.cv2((torch.cat([self.cv1(self.pad[g](x)) for g in range(4)], 1)))
YOLO11引入代码
在根目录下的ultralytics/nn/目录,新建一个 conv目录,然后新建一个以 PConv为文件名的py文件, 把代码拷贝进去。
import torch
import torch.nn as nn
import torch.nn.functional as F
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if isinstance(k, int) else [d * (x - 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
class PConv(nn.Module):
''' Pinwheel-shaped Convolution using the Asymmetric Padding method. '''
def __init__(self, c1, c2, k, s):
super().__init__()
# self.k = k
p = [(k, 0, 1, 0), (0, k, 0, 1), (0, 1, k, 0), (1, 0, 0, k)]
self.pad = [nn.ZeroPad2d(padding=(p[g])) for g in range(4)]
self.cw = Conv(c1, c2 // 4, (1, k), s=s, p=0)
self.ch = Conv(c1, c2 // 4, (k, 1), s=s, p=0)
self.cat = Conv(c2, c2, 2, s=1, p=0)
def forward(self, x):
yw0 = self.cw(self.pad[0](x))
yw1 = self.cw(self.pad[1](x))
yh0 = self.ch(self.pad[2](x))
yh1 = self.ch(self.pad[3](x))
return self.cat(torch.cat([yw0, yw1, yh0, yh1], dim=1))
class APC2f(nn.Module):
"""Faster Implementation of APCSP Bottleneck with Asymmetric Padding convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, P=True, g=1, e=0.5):
"""Initialize CSP bottleneck layer with two convolutions with arguments ch_in, ch_out, number, shortcut, groups,
expansion.
"""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
if P:
self.m = nn.ModuleList(APBottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
else:
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through APC2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
class APBottleneck(nn.Module):
"""Asymmetric Padding bottleneck."""
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
"""Initializes a bottleneck module with given input/output channels, shortcut option, group, kernels, and
expansion.
"""
super().__init__()
c_ = int(c2 * e) # hidden channels
p = [(2,0,2,0),(0,2,0,2),(0,2,2,0),(2,0,0,2)]
self.pad = [nn.ZeroPad2d(padding=(p[g])) for g in range(4)]
self.cv1 = Conv(c1, c_ // 4, k[0], 1, p=0)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
"""'forward()' applies the YOLO FPN to input data."""
return x + self.cv2((torch.cat([self.cv1(self.pad[g](x)) for g in range(4)], 1))) if self.add else self.cv2((torch.cat([self.cv1(self.pad[g](x)) for g in range(4)], 1)))
tasks注册
在ultralytics/nn/tasks.py中进行如下操作:
步骤1:
from ultralytics.nn.conv.PConv import PConv
步骤2
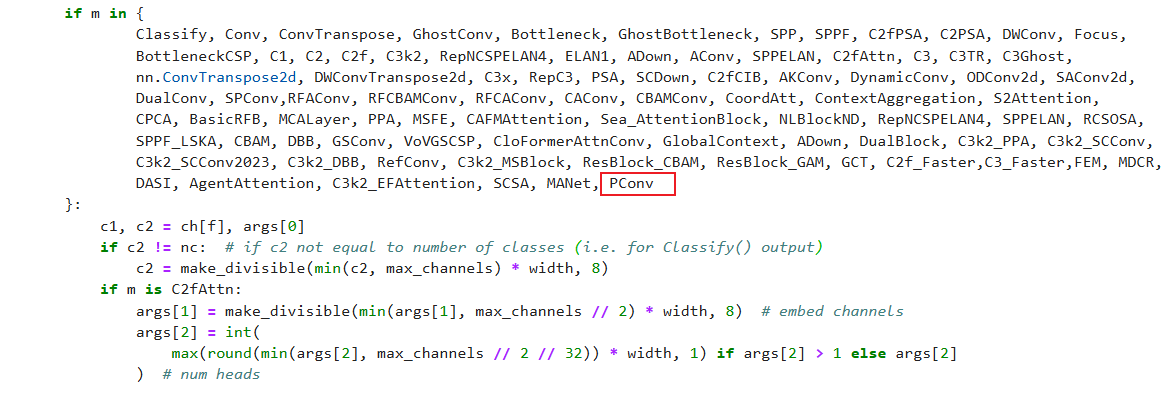
修改def parse_model(d, ch, verbose=True):
PConv
配置yolov11-PConv.yaml
ultralytics/cfg/models/11/yolov11-PConv.yaml
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 8 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
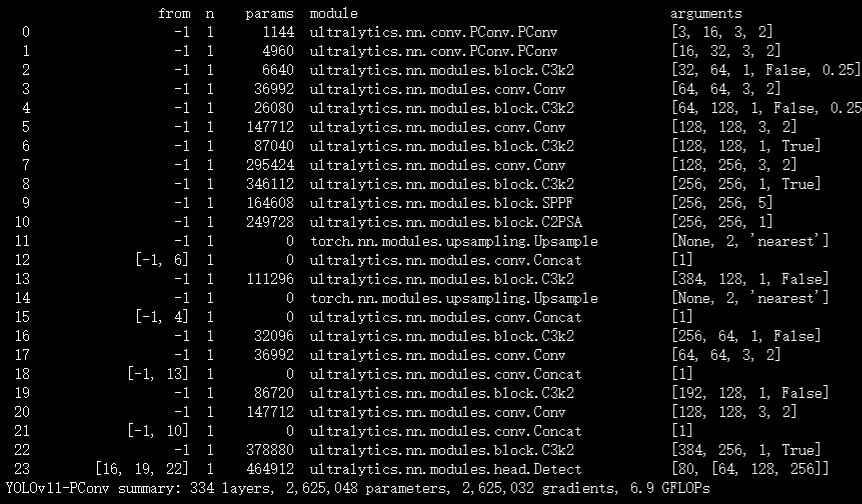
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, PConv, [64, 3, 2]] # 0-P1/2
- [-1, 1, PConv, [128, 3, 2]] # 1-P2/4
- [-1, 2, C3k2, [256, False, 0.25]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 2, C3k2, [512, False, 0.25]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 2, C3k2, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 2, C3k2, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
- [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 2, C3k2, [512, False]] # 13
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
实验
脚本
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
# 修改为自己的配置文件地址
model = YOLO('/root/ultralytics-main/ultralytics/cfg/models/11/yolov11-PConv.yaml')
# 修改为自己的数据集地址
model.train(data='/root/ultralytics-main/ultralytics/cfg/datasets/coco8.yaml',
cache=False,
imgsz=640,
epochs=10,
single_cls=False, # 是否是单类别检测
batch=8,
close_mosaic=10,
workers=0,
optimizer='SGD',
amp=True,
project='runs/train',
name='PConv',
)
结果

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 2
2 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)