FreeRTOS 入门(七):FreeRTOS 源码结构与核心编程规范解析
本文详细解析了FreeRTOS的源码结构与编程规范。重点包括:核心功能文件(task.c/list.c等)的作用、可移植目录(portable)的设计原理、内存管理(MemMang)的实现方式;介绍了配置文件FreeRTOSConfig.h的定制方法和main.c中的启动流程;详解了FreeRTOS特有的数据类型(TickType_t/BaseType_t)和严格的命名规范(变量前缀、函数前缀、宏
目录
- 一、前言
- 二、FreeRTOS 源码核心文件结构
- 2.1 核心功能文件(task/list 等)
- 2.2 可移植目录(portable)解析
- 2.3 内存管理目录(MemMang)
- 三、配置文件与入口函数
- 3.1 配置文件(FreeRTOSConfig.h)
- 3.2 核心入口函数(main.c 中)
- 四、数据类型与编程规范
- 4.1 核心数据类型(TickType_t/BaseType_t)
- 4.2 变量名 / 函数名 / 宏的命名规则
- 4.3 通用宏定义
- 五、下一篇预告
- 六、结尾
一、前言
大家好,我是 Hello_Embed。上一篇我们彻底搞懂了任务独立栈的核心原因,为理解 FreeRTOS 底层实现打下了基础。这一篇,我们将从 “用 CubeMX 生成工程” 过渡到 “看懂源码结构”—— 毕竟要真正掌握 RTOS,不能只停留在 “会用”,还要知道生成的源码里都藏着什么。
本篇笔记会带大家逐一拆解 FreeRTOS 的源码目录结构,搞懂每个核心文件的作用、可移植目录的设计逻辑,再梳理 FreeRTOS 专属的数据类型和编程规范(命名规则、宏定义等),为后续深入源码(如任务创建、调度器)做好铺垫。如果你跟着之前的笔记创建了工程,可以同步打开源码目录,对照着看更直观。
二、FreeRTOS 源码核心文件结构
用 CubeMX 生成 FreeRTOS 工程后,源码会自动存放在Middlewares/Third_Party/FreeRTOS/Source目录下,最底层的文件就是 FreeRTOS 的核心,结构清晰且功能划分明确。
2.1 核心功能文件(task/list 等)
这些文件是 FreeRTOS 的 “骨架”,每个文件对应一个核心功能模块,无需修改,直接编译使用:
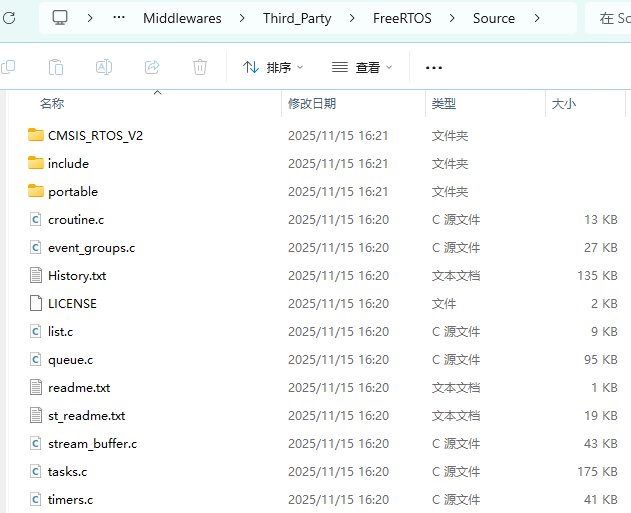
task.c:任务管理核心文件,包含任务创建(xTaskCreate)、任务优先级设置、任务调度等核心函数;list.c:链表操作文件,FreeRTOS 内部大量使用链表管理任务、定时器等,该文件封装了链表的增删改查接口;event_groups.c:事件组相关文件,用于多任务间的事件同步(如多个任务等待同一个事件触发);timer.c:软件定时器文件,提供基于系统 Tick 的定时器功能(如定时执行某任务);- 其他文件(
queue.c/semphr.c等):分别对应队列、信号量等功能,后续用到时再详细讲解。
2.2 可移植目录(portable)解析
portable目录是 FreeRTOS 的 “适配层”,核心作用是让 FreeRTOS 能在不同 IDE、不同 CPU 架构上运行,里面的文件需要根据硬件环境适配,不能随意修改:
1. RVDS 子目录
- 作用:对应 MDK-ARM(Keil)IDE,里面的子目录按 CPU 架构(如 ARM_CM4F,对应 STM32G431 的 Cortex-M4F 内核)划分;
- 核心文件:
port.c和portasm.s(汇编文件),包含与 CPU 架构强相关的代码(如任务切换时的寄存器操作、栈初始化); - 关键说明:不同 CPU 架构的寄存器操作、中断机制不同,不同 IDE 的汇编语法也有差异,因此将这些 “硬件相关代码” 单独放在可移植目录,确保核心文件(task.c 等)与硬件无关。
2. MemMang 子目录
- 作用:内存管理(堆管理)文件目录,FreeRTOS 提供了 5 种默认的堆管理实现(
heap_1.c~heap_5.c); - 核心逻辑:之前我们手动实现过简单堆管理,FreeRTOS 的堆管理文件封装了更完善的
pvPortMalloc(堆分配)和vPortFree(堆释放)函数; - 灵活配置:用户也可以自定义堆管理函数,替换默认实现,因此堆管理文件也归为 “可移植” 范畴。
2.3 内存管理目录(MemMang)
如上面所述,MemMang是portable的子目录,专门存放堆管理实现,后续会单独讲解如何选择和使用这些堆管理文件。
三、配置文件与入口函数
3.1 配置文件(FreeRTOSConfig.h)
FreeRTOS 的所有配置都集中在这个文件中,目录路径为Core/Inc:
- 配置来源:CubeMX 中对 FreeRTOS 的所有设置(如任务优先级、栈大小、系统 Tick 频率),都会同步到这个文件中;
- 核心配置项:如
configUSE_PREEMPTION(是否启用抢占式调度)、configTICK_RATE_HZ(系统 Tick 频率)、configMAX_PRIORITIES(最大任务优先级)等; - 自定义配置:如果需要修改 FreeRTOS 的行为(如关闭某个功能以节省内存),直接修改该文件的宏定义即可,无需改动核心源码。
3.2 核心入口函数(main.c 中)
FreeRTOS 的启动流程集中在main函数的最后几行,是工程运行的 “总开关”,源码如下(保留原注释,仅优化格式):
/* Init scheduler */
osKernelInitialize(); /* 初始化FreeRTOS运行环境:初始化堆、链表等核心数据结构 */
MX_FREERTOS_Init(); /* 创建任务:在该函数中调用xTaskCreate创建我们定义的任务 */
/* Start scheduler */
osKernelStart(); /* 启动调度器:开始任务切换,FreeRTOS正式运行 */
- 执行逻辑:先初始化 FreeRTOS 环境,再创建任务,最后启动调度器 —— 调度器启动后,CPU 会按照优先级和调度策略,自动切换执行各个任务;
- 注意:
osKernelInitialize和osKernelStart是 CMSIS-V2 统一接口,底层会调用 FreeRTOS 原生的vTaskStartScheduler等函数。
四、数据类型与编程规范
FreeRTOS 有一套严格的命名规范和数据类型定义,目的是保证代码的可移植性和可读性 —— 不管在哪个架构上运行,代码风格和数据类型都保持一致。
4.1 核心数据类型(TickType_t/BaseType_t)
这两种数据类型定义在portmacro.h(可移植目录下),是 FreeRTOS 最基础的数据类型:
1. TickType_t
- 核心作用:存储系统 Tick 计数(系统 Tick 是周期性中断,每触发一次,计数加 1);
- 类型适配:
- 定义
configUSE_16_BIT_TICKS时,为uint16_t(16 位); - 未定义则为
uint32_t(32 位);
- 定义
- 使用建议:32 位 CPU(如 STM32G431)建议用 32 位类型,避免 Tick 计数溢出(16 位最大计数 65535,32 位可支持更长时间)。
2. BaseType_t
- 核心作用:该架构下 “最高效的数据类型”(CPU 处理该类型时速度最快);
- 类型适配:
- 32 位架构:
uint32_t; - 16 位架构:
uint16_t; - 8 位架构:
uint8_t;
- 32 位架构:
- 典型用途:作为函数返回值(如
pdPASS/pdFAIL)、逻辑判断变量(如pdTRUE/pdFALSE)。
4.2 变量名 / 函数名 / 宏的命名规则
FreeRTOS 的命名规则非常统一,通过前缀就能判断变量类型、函数作用、宏的定义位置:
1. 变量名前缀规则
| 变量名前缀 | 含义 |
|---|---|
| c | char(字符型) |
| s | int16_t/short(短整型) |
| l | int32_t/long(长整型) |
| x | BaseType_t 或非标准类型(结构体、任务句柄、队列句柄等) |
| u | unsigned(无符号型) |
| p | 指针(如pTask表示任务指针) |
| uc | uint8_t/unsigned char(无符号字符型) |
| pc | char 指针(字符串指针,如pcName表示任务名称指针) |
示例:pxTaskCode(x = 结构体 / 句柄类型,p = 指针,TaskCode = 任务函数代码)、uxPriority(u = 无符号,x=BaseType_t,Priority = 优先级)。
2. 函数名前缀规则
| 函数名前缀 | 含义 |
|---|---|
| vTaskPrioritySet | v = 返回值 void,在 task.c 中定义(任务优先级设置) |
| xQueueReceive | x = 返回值 BaseType_t,在 queue.c 中定义(队列接收) |
| pvTimerGetTimerID | pv = 返回值 void*,在 timer.c 中定义(获取定时器 ID) |
核心逻辑:前缀首字母表示返回值类型,后续单词表示功能,文件名对应所在源码文件。
3. 宏命名规则
宏的名称全大写,前缀表示宏的定义位置:
| 宏的前缀 | 定义位置 |
|---|---|
| port(如 portMAX_DELAY) | portable.h 或 portmacro.h(可移植层) |
| task(如 taskENTER_CRITICAL ()) | task.h(任务相关) |
| pd(如 pdTRUE) | projdefs.h(通用定义) |
| config(如 configUSE_PREEMPTION) | FreeRTOSConfig.h(配置文件) |
| err(如 errQUEUE_FULL) | projdefs.h(错误码定义) |
4.3 通用宏定义
FreeRTOS 定义了一组通用宏,用于逻辑判断和函数返回值,避免直接使用 1/0,提高代码可读性:
| 宏 | 值 | 含义 |
|---|---|---|
| pdTRUE | 1 | 逻辑真(如条件满足) |
| pdFALSE | 0 | 逻辑假(如条件不满足) |
| pdPASS | 1 | 函数执行成功(如任务创建成功) |
| pdFAIL | 0 | 函数执行失败(如任务创建失败) |
五、下一篇预告
本次我们拆解了 FreeRTOS 的源码结构,掌握了核心文件、可移植层的作用,以及关键的编程规范 —— 这些是看懂 FreeRTOS 源码的 “钥匙”。下一篇,我们将聚焦 FreeRTOS 的内存管理:
- 5 种默认堆管理实现(
heap_1.c~heap_5.c)的区别与选择; - 如何使用
pvPortMalloc和vPortFree进行动态内存分配; - 堆大小配置与溢出防护技巧。
六、结尾
本篇笔记的核心是 “打通源码结构与编程规范”——FreeRTOS 的源码设计非常优雅,核心功能与硬件解耦(通过可移植层),命名规范统一,让我们能快速定位所需功能的文件和函数。
掌握这些基础后,后续看task.c(任务创建)、list.c(链表管理)等源码时,就不会感到陌生:看到xTaskCreate就知道是返回BaseType_t的

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 30
30 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)