轨迹预测技术综述:方法、数据与评估
轨迹预测技术综述:方法、数据与评估
轨迹预测技术全面综述:方法、数据与评估
轨迹预测是自动驾驶、智能交通等领域的核心关键技术。该技术已从早期依赖单一物理规则的预测,演进为融合环境感知、社会交互推理与多模态生成的复杂智能任务。本文旨在系统梳理其核心挑战、方法论演进、当前SOTA趋势,并汇总公认的数据集与评价指标,为相关研究与应用提供全面参考。
一、核心问题与挑战
1.1 问题定义
轨迹预测的核心任务是:基于智能体(如车辆、行人、无人机)的历史轨迹(通常为1-3秒),结合场景上下文(如高精地图、交通规则、传感器数据),预测其未来一段时间(通常为5-8秒)内可能的多条合理轨迹,并以概率分布的形式呈现,而非单一的"平均"路径。
1.2 核心挑战
- 多模态性:智能体在同一时刻可能存在多种合理意图(如直行、左转、右转)
- 交互建模:精准捕捉智能体之间复杂、动态的社会交互行为
- 场景融合:高效融合异质、高维的场景信息(矢量地图、激光雷达点云、相机图像)
- 物理约束:生成的轨迹需符合运动学与动力学约束
- 长尾问题:对极端天气、严重遮挡、异常行为等罕见场景的预测鲁棒性
二、方法论演进与里程碑论文
轨迹预测的技术发展可划分为四个主要阶段,其演进脉络与代表性工作如下图所示: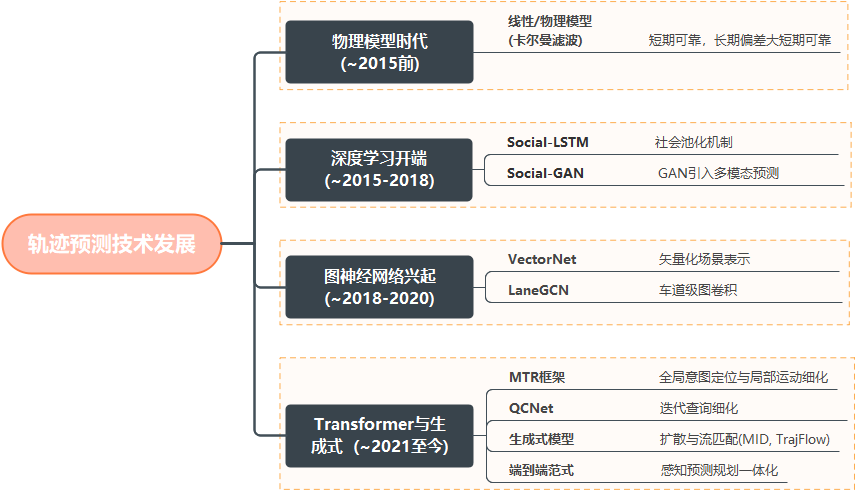
2.1 早期与基于物理的模型(~2015年前)
- 方法:卡尔曼滤波、粒子滤波、基于运动学方程的预测
- 特点:短期预测可靠,计算高效;但无法建模交互与意图
2.2 深度学习时代的开端(~2015-2018)
- Social-LSTM:提出"社会池化"机制,首次显式建模群体交互
- Social-GAN:首次将GAN引入轨迹预测,实现多模态输出
- 论文链接:arXiv:1803.10892
2.3 图神经网络(GNN)的兴起(~2018-2020)
- VectorNet:创新性地将轨迹和高精地图表示为矢量化多段折线
- 论文链接:arXiv:2005.04259
- LaneGCN:专为车道级预测设计的多尺度车道图卷积网络
- 论文链接:arXiv:2007.13732
2.4 Transformer与生成式模型的统治(~2021 - 至今)
基于意图查询的方法
- MTR (Motion Transformer):引入可学习意图查询 + 全局-局部注意力机制
- 论文链接:arXiv:2209.13508
- MTR v3:2024 Waymo挑战赛冠军,融合LiDAR与动态锚点更新
- 论文链接:arXiv:2306.17770
- QCNet:迭代查询细化,统一建模意图、轨迹与交互
基于生成式模型的方法
- MID:首次将扩散模型应用于轨迹预测
- 论文链接:arXiv:2203.13777
- TrajFlow:引入流匹配范式,训练稳定、采样高效
- 论文链接:arXiv:2506.08541
端到端自动驾驶融合范式
- UniAD:统一感知、预测、规划于Transformer框架
- 论文链接:arXiv:2212.10156
三、公认数据集与评价指标
3.1 核心数据集
| 数据集 | 场景与智能体 | 规模与特点 | 核心挑战 |
|---|---|---|---|
| ETH/UCY | 行人、校园 | 规模小(~1.5k行人),5个子集 | 复杂的社会交互 |
| Argoverse 1/2 | 车辆、路口 | 32万+场景,提供高精地图。车辆轨迹预测标杆 | 复杂路口的意图判断 |
| Waymo Open Motion(需翻墙) | 车辆、行人、骑行者 | 规模最大(10万+场景)。当前SOTA基准 | 密集交互、长尾场景 |
| nuScenes | 车辆、行人 | 多传感器融合 | 多模态感知信息融合 |
3.2 核心评价指标
基于距离的指标
- minADE:最小平均位移误差,衡量最佳表现精度
- minFDE:最小最终位移误差,衡量最终目标点准确性
- 碰撞率:衡量轨迹的安全性和社会合理性
- 失效率:衡量轨迹是否符合场景物理约束
基于概率的指标
- 负对数似然(NLL):评估概率预测模型校准度的金标准
- Soft minAP:Waymo排行榜核心排名指标,综合衡量召回率与精度
四、当前SOTA方法与发展趋势(2024-2025)
4.1 查询/意图模型的极致优化
- MTR系列和QCNet通过精细的查询设计在主流数据集持续领先
- 重点关注全局-局部注意力机制和迭代细化策略
4.2 生成式模型的效率与质量平衡
- 流匹配模型(TrajFlow、FlowChain)因采样效率受到关注
- 逐步取代部分扩散模型的应用场景
4.3 端到端与大模型融合
- UniAD范式推动感知-预测-规划一体化
- 大语言模型赋能复杂场景语义理解
4.4 跨场景与多模态融合
- 从地面交通拓展至空中交通管理
- 激光雷达与相机等多传感器协同编码
五、未来展望与挑战
5.1 技术发展方向
- 基础模型构建:预训练于海量驾驶数据的轨迹预测基础模型
- 可解释性提升:开发具有因果推理能力的模型
- 长尾问题突破:通过生成式主动学习提升极端场景鲁棒性
5.2 评估体系演进
- 闭环评估:从开环数据集指标转向闭环仿真测试
- 跨场景迁移:开发统一框架适配多场景预测需求
总结
轨迹预测领域正朝着**更融合(端到端)、更智能(大模型赋能)、更高效(流匹配)、更可靠(解决长尾)**的方向发展。研究者应重点关注:
- SOTA方法:MTR系列、QCNet等查询式方法及TrajFlow等生成式方法
- 权威基准:Waymo Open Motion Dataset上的综合性能表现
- 核心指标:Soft minAP、NLL等概率性评估指标
- 未来趋势:端到端框架与大模型融合的技术路线
本综述为相关研究提供了从基础方法到前沿趋势的完整技术图谱,可作为轨迹预测领域研究的参考。
🚀 官方GitHub仓库公告
这是我们的官方 GitHub 仓库!汇总了自动驾驶与机器人领域前沿资源,涵盖 VLMM/VLA 技术、端到端模型、SLAM 方案等。
同步公众号「智驾与机器人前瞻」内容,论文 + 代码 + 解析一键获取!
🔗 仓库地址: https://github.com/YangHRandLiuZ/Autonomous-Driving-Robot-Frontier-Learning
🙏 欢迎支持:
- 欢迎提交 PR #5, HENS!
- 麻烦给我们的仓库点上一个小星星 ⭐,这对我们真的很重要!
- 感谢你的支持~
搜索并关注“智驾和机器人前瞻局”公众号。更多优质内容等你来。
————————————————
版权声明:本文为CSDN博主「智驾和机器人前瞻局」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_36850381/article/details/155005433

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 18
18 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)