创新应用构想:用 CANN 构建未来的智能交通系统
全栈效率: CANN 提供了从模型转换 (ATC) 到设备调用 (AscendCL) 的全套工具链,确保 AI 算法能在昇腾 NPU 上获得极致的性能。实时性保障: 通过异步执行和高性能算子,满足了边缘侧对毫秒级实时决策的苛刻要求。开发运维友好: 专业的性能分析工具和标准化的 API,极大地简化了 AI 应用的开发和运维难度。openEuler 作为 CANN 的稳定运行底座,与昇腾生态的深度融合
一、引言:从交通管理到城市交通生命体
我们当前的城市交通系统,本质上仍是一个被动响应的机械集合。未来的智能交通系统(ITS),应当是一个主动感知、实时决策、持续进化的“城市交通生命体”。它能像神经网络一样, мгновенно处理分布在城市各个角落的感知信息,预测即将发生的拥堵,自动优化信号灯配时,甚至在事故发生前发出预警。要实现这一宏大愿景,其技术核心在于两点:海量的边缘 AI 计算和一个强大、高效、全栈的 AI 基础设施。这次我将详细阐述如何基于华为昇腾的 CANN 生态,构建这样一个未来的智能交通系统,并深入探讨 CANN 在其中扮演的关键角色。
二、核心引擎:为何选择 CANN?
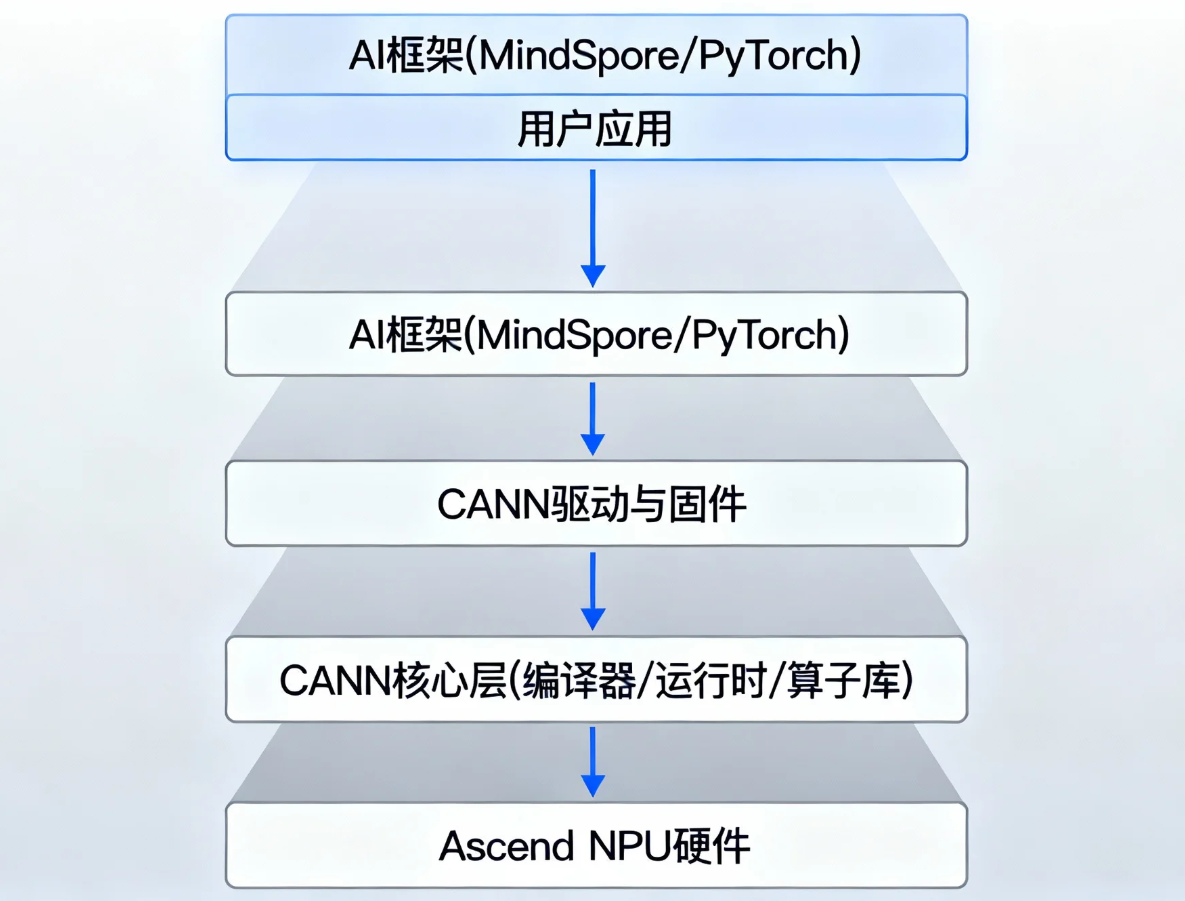
CANN 并非仅仅一个推理库,而是昇腾 AI 的全栈式基础设施,它为上层 AI 应用与底层 NPU 硬件之间搭建了坚实的桥梁。
| CANN 核心组件 | 角色与价值 | 技术实现侧重 |
|---|---|---|
| AscendCL (计算语言接口) | 应用与硬件的“高速公路”,直接调用 NPU 的计算、媒体处理能力。 | C/C++ API 接口,实现设备管理、内存分配、模型加载等。 |
| ATC (Ascend Tensor Compiler) | 昇腾模型转换与优化工具。 | 离线编译、算子融合、量化优化、图优化,生成 .om 模型。 |
| 算子库 (TBE/AI Core) | NPU 计算能力的“弹药库”,提供数千个深度优化算子。 | 提供了 TBE DSL,支持开发者自定义开发高性能新算子。 |
| 工具链 (Toolkit) | 提供了性能调优、精度比对、日志管理等运维工具。 | Ascend-profiler, Ascend-d-log 等命令行工具。 |
三、总体架构:三层协同的城市交通大脑
我们构想的智能交通系统是一个云、边、端三层协同的架构。
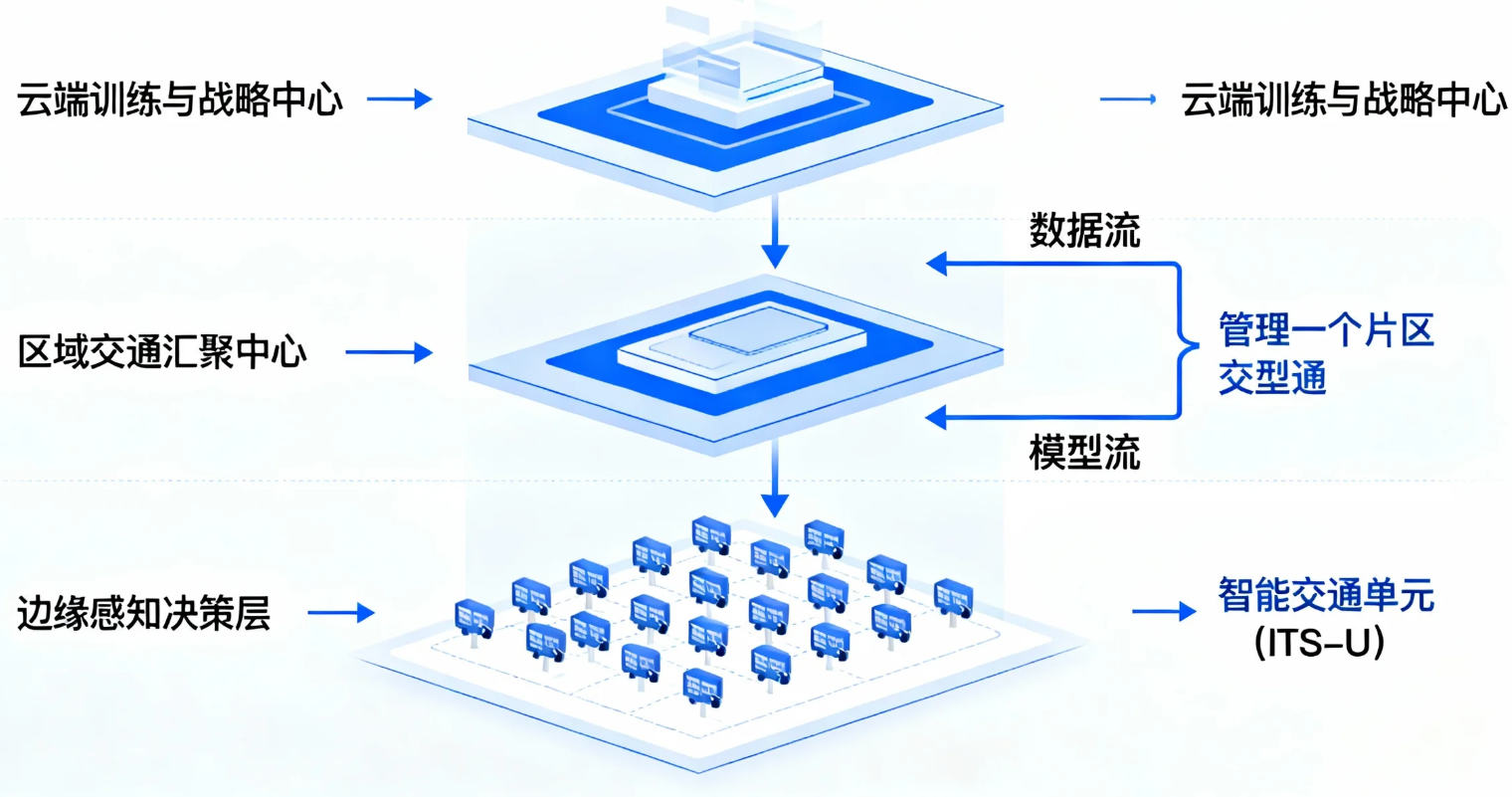
边缘感知决策层 (Edge): 搭载昇腾芯片(如 Atlas 200/500)的边缘计算设备,运行 openEuler 和 CANN。
职责: 实时视频分析、车辆/行人检测与追踪、事件检测(事故、拥堵)。
区域交通汇聚中心 (Hub): 负责汇聚和分析一个区域内所有边缘单元上传的结构化数据,进行区域路网的协同优化。
云端训练与战略中心 (Cloud): 进行 AI 模型的训练、重训练和迭代,长周期交通态势分析。
四、边缘实践一:模型优化与 ATC 转换
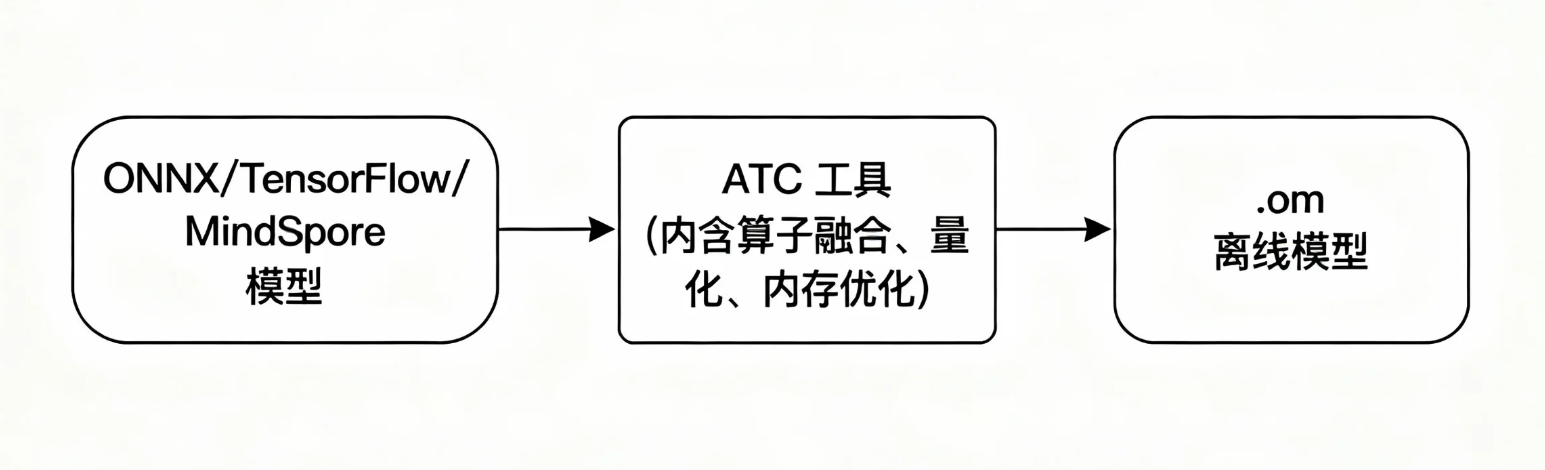
ATC (Ascend Tensor Compiler) 是 CANN 的核心价值所在。它负责将模型从通用的计算图,转换为 NPU 硬件上最高效的执行指令。
4.1 模型转换实战
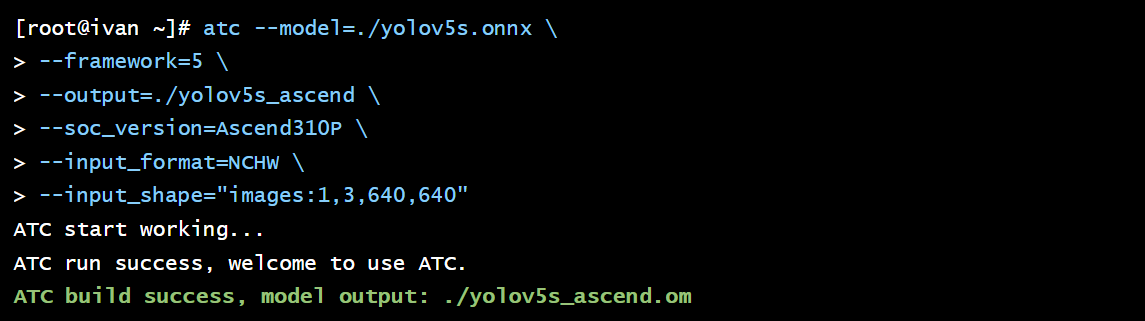
我们将训练好的模型(例如 ONNX 格式的 YOLOv5)转换为昇腾的 .om 格式。
# 假设我们有一个 yolov5s.onnx 模型文件
# 使用 ATC 工具进行模型转换
atc --model=./yolov5s.onnx \
--framework=5 \ # 框架类型:5 代表 ONNX
--output=./yolov5s_ascend \ # 输出的 .om 模型路径
--soc_version=Ascend310P \ # 指定目标 NPU 型号 (例如 310P)
--input_format=NCHW \ # 输入数据格式
--input_shape="images:1,3,640,640" # 输入数据的维度
4.2 转换后的性能验证
转换完成后,我们可以使用 CANN 提供的工具查看模型的优化细节。
# 查看生成的 .om 模型的详细信息,包括算子调度、内存使用等
atc --singleop="yolov5s_ascend.om" --print_op_info=true
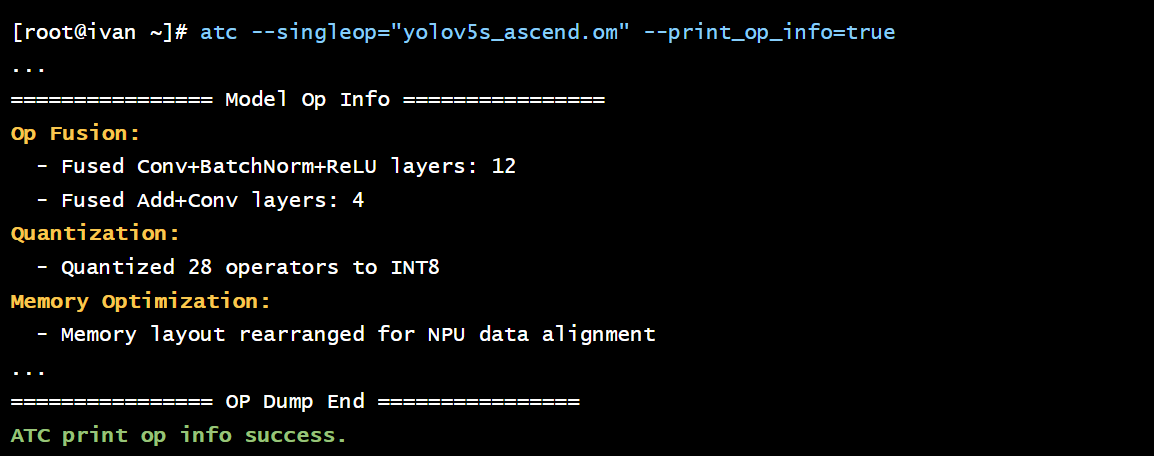
分析: ATC 在这个过程中,进行了算子融合、量化优化、内存重排等操作,使原本分散的计算任务在 NPU 上可以流水线化并行执行,显著提升推理性能。
五、边缘实践二:AscendCL 实时视频流推理
在 ITS-U 单元,应用程序需要实时调用 NPU 资源进行推理。这是通过 AscendCL API 实现的。
5.1 昇腾设备状态验证
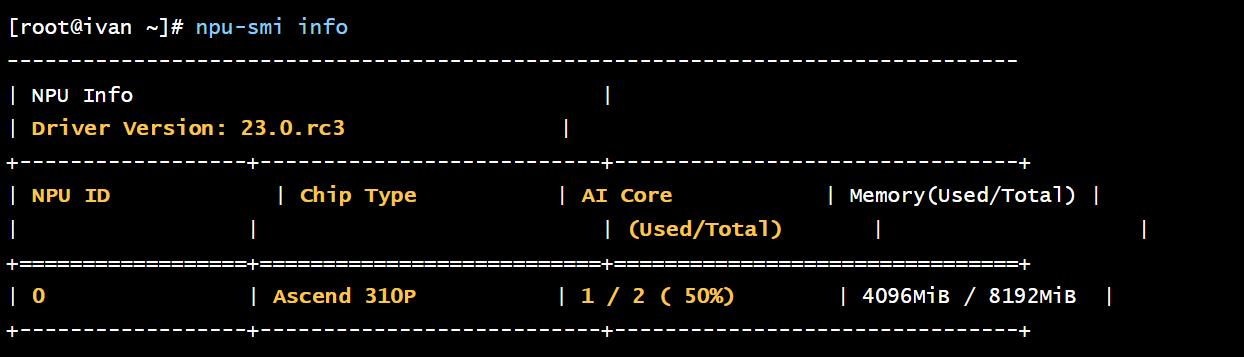
在 openEuler 终端,我们首先验证 NPU 状态。
npu-smi info
5.2 AscendCL 核心代码片段 (C++)
在边缘应用中,调用 NPU 资源的逻辑高度依赖 AscendCL。
// 示意性的 C++ AscendCL 核心调用流程
#include "acl/acl.h"
// 1. 初始化 AscendCL 库和运行时环境
aclError InitAscend(int deviceId) {
aclrtSetDevice(deviceId); // 设置当前 NPU 设备 ID
return aclInit(nullptr); // 初始化 acl 库
}
// 2. 模型加载
aclmdlLoadFromFile(omModelPath, &modelId); // 从 .om 文件加载模型
// 3. 异步推理执行
// ret = aclrtLaunchKernel(kernel_func, num_blocks, args, 0, stream);
ret = aclmdlExecuteAsync(modelId, inputDataset, outputDataset, stream); // 异步执行推理
// 4. 等待结果并同步
aclrtSynchronizeDevice();
// ...
AscendCL 的价值: 通过异步执行和流(Stream)管理,CANN 允许应用在 NPU 进行推理的同时,CPU 可以进行视频解码、数据预处理和后处理,实现了CPU-NPU 的高效并行。
六、边缘实践三:CANN Toolkit 性能调优
要达到 ITS 对实时性的毫秒级要求,性能调优必不可少。CANN Toolkit 提供了强大的分析工具。
6.1 使用 Ascend-profiler 进行性能画像
在应用推理运行期间,我们可以使用性能分析工具采集 NPU 的执行细节,定位性能瓶颈。
# 启动应用 (PID=12345)
# ...
# 使用 Ascend-profiler 采集 NPU 上的算子执行耗时和 HBM (显存) 访问情况
ascend-profiler start -p 12345 -m "task_queue,aicore_trace,host_info"
# ... (等待采集)
ascend-profiler stop
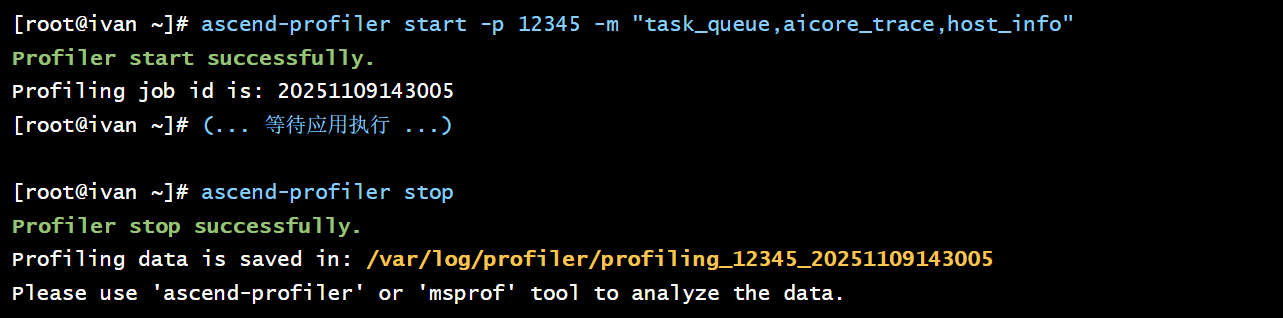
分析: 通过分析,开发者可以判断瓶颈是出现在数据传输、模型计算还是算子效率上,从而指导模型优化或算子自定义开发。
七、数据流与模型的闭环进化
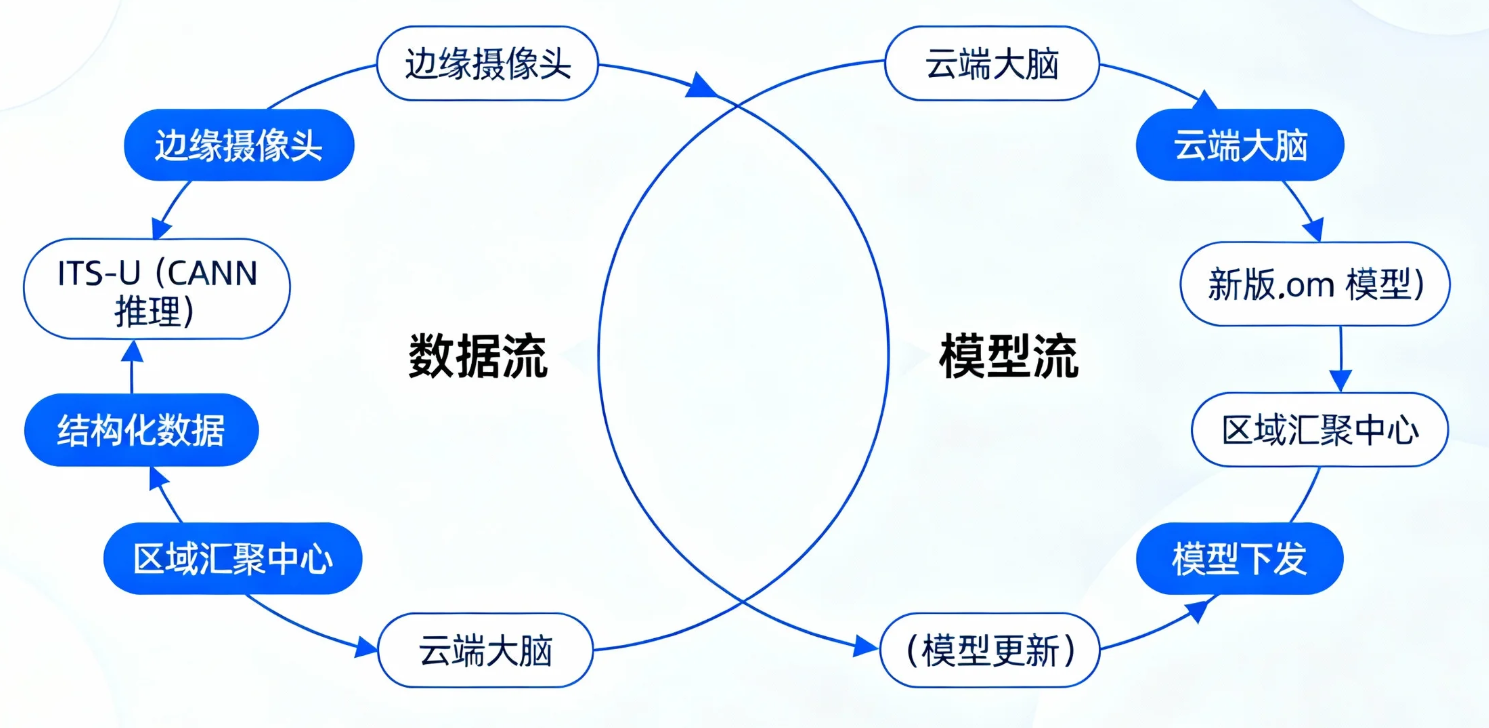
这个双闭环系统,使得交通大脑能够利用全局数据不断学习和进化,并将更聪明的réflexes (模型) 更新到每一个神经末梢(边缘单元),实现整个交通生命体的持续成长。
八、总结:CANN,构筑智能世界的基石
本次创新应用构想,展示了 CANN 生态在构筑未来智能交通系统中的核心价值:
- 全栈效率: CANN 提供了从模型转换 (ATC) 到设备调用 (AscendCL) 的全套工具链,确保 AI 算法能在昇腾 NPU 上获得极致的性能。
- 实时性保障: 通过异步执行和高性能算子,满足了边缘侧对毫秒级实时决策的苛刻要求。
- 开发运维友好: 专业的性能分析工具和标准化的 API,极大地简化了 AI 应用的开发和运维难度。
openEuler 作为 CANN 的稳定运行底座,与昇腾生态的深度融合,正在加速一个更加高效、安全、智能的未来交通体系的到来。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 13
13 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)