快速排序——各种方法图文详解,从入门到精通
时间复杂度:O(N*logN)空间复杂度:O(logN)(因为需要不断的开栈,二分划分区间不断向下开空间)稳定性:不稳定.t=P9T8t=P9T8栈的相关知识https://blog.csdn.net/2401_88240248/article/details/151156635?堆的相关知识https://blog.csdn.net/2401_88240248/article/details/1
快速排序介绍:
快速排序是一种非常常用的排序方法,它在1962由C. A. R. Hoare(霍尔)提的一种二叉树结构的交换排序方法,故因此它又被称为霍尔划分,它基于分治的思想,所以整体思路是递归进行的。
基本思想:
任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止.
基本思路:
- 先在待排的数中找到一个key值,一般key值在数组第一个数(后续优化过程中,会将待排数的第一个数,中间的数,以及最后一个数进行比较,取中间大的数做key值).
- 确定key后,经过操作将key放在其合适位置,即其左边的数都比key小,右边数都比key大,但左边或右边的数并不一定有序,随后在由递归思想将其,key左边以及右边部分分别进行递归处理,最后直到待排区间不存在或只有一个元素时返回.
递归版本
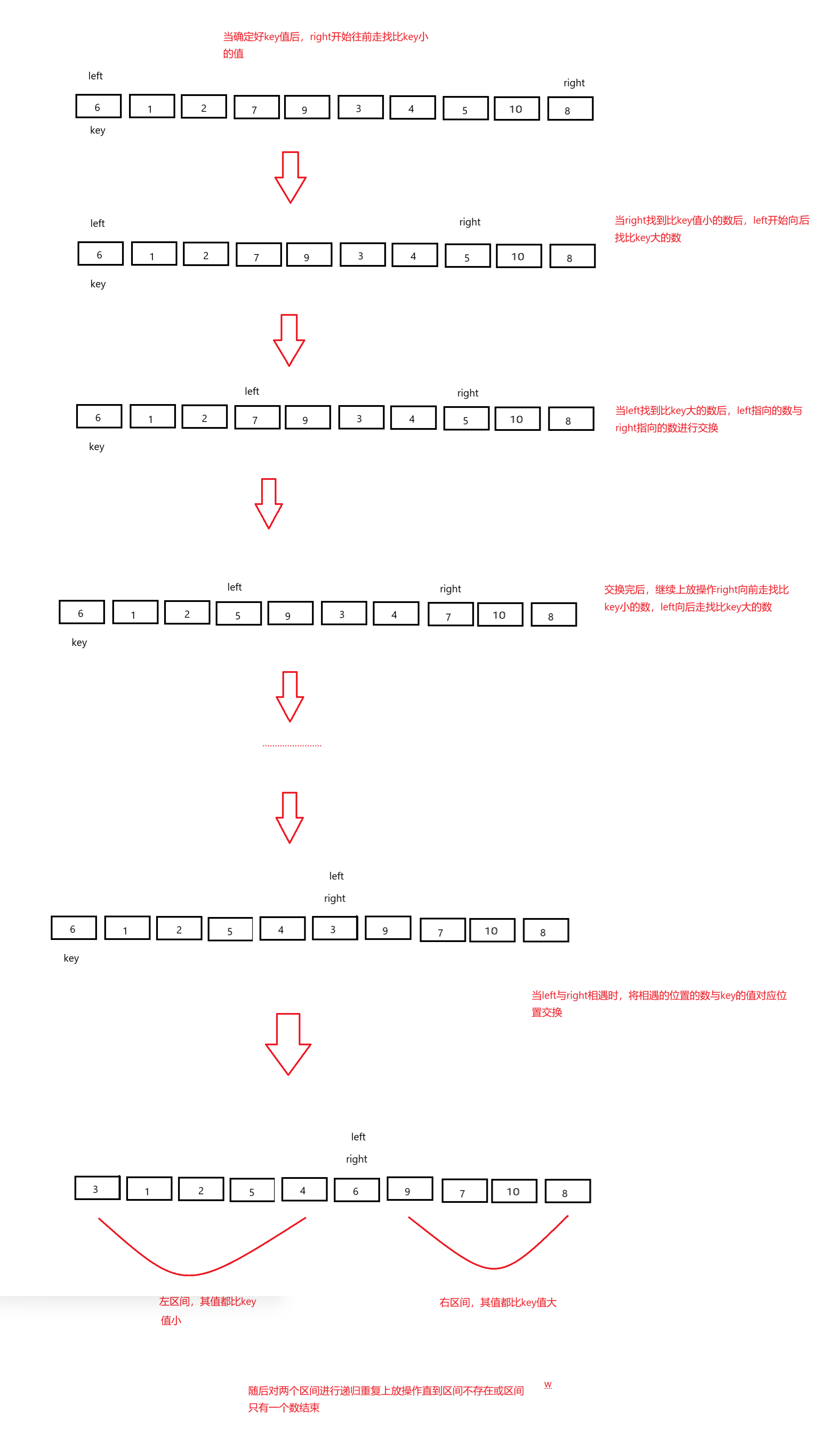
一.hoare版本
为什么先走right,而不是先走left?
这是因为当先走left时,最后在两者相遇前交换了一次数据,此时right指向的值大于key,left往后走与right相遇,key与right交换,此时一个大于key的值便交换到左边,因此不能先走left,当走right时,两者相遇的数一定是比key小或等于key.
步骤展示:
下图是对其进行的详细分析讲解
代码:
void Quicksort(int* a, int left,int right)
{
if (left >= right)
{
return;
}//n=1时即为left=right,当n<0,left>right
int Pleft = left;
int Pright = right;
int keyi = left;
while (left < right)
{
while (left < right && a[right]>=a[keyi])
{
right--;
}
while (left < right && a[left]<=a[keyi])
{
left++;
}
swap(&a[left], &a[right]);
}
swap(&a[keyi], &a[left]);
Quicksort(a, Pleft, left - 1);
Quicksort(a, left + 1, Pright);
}
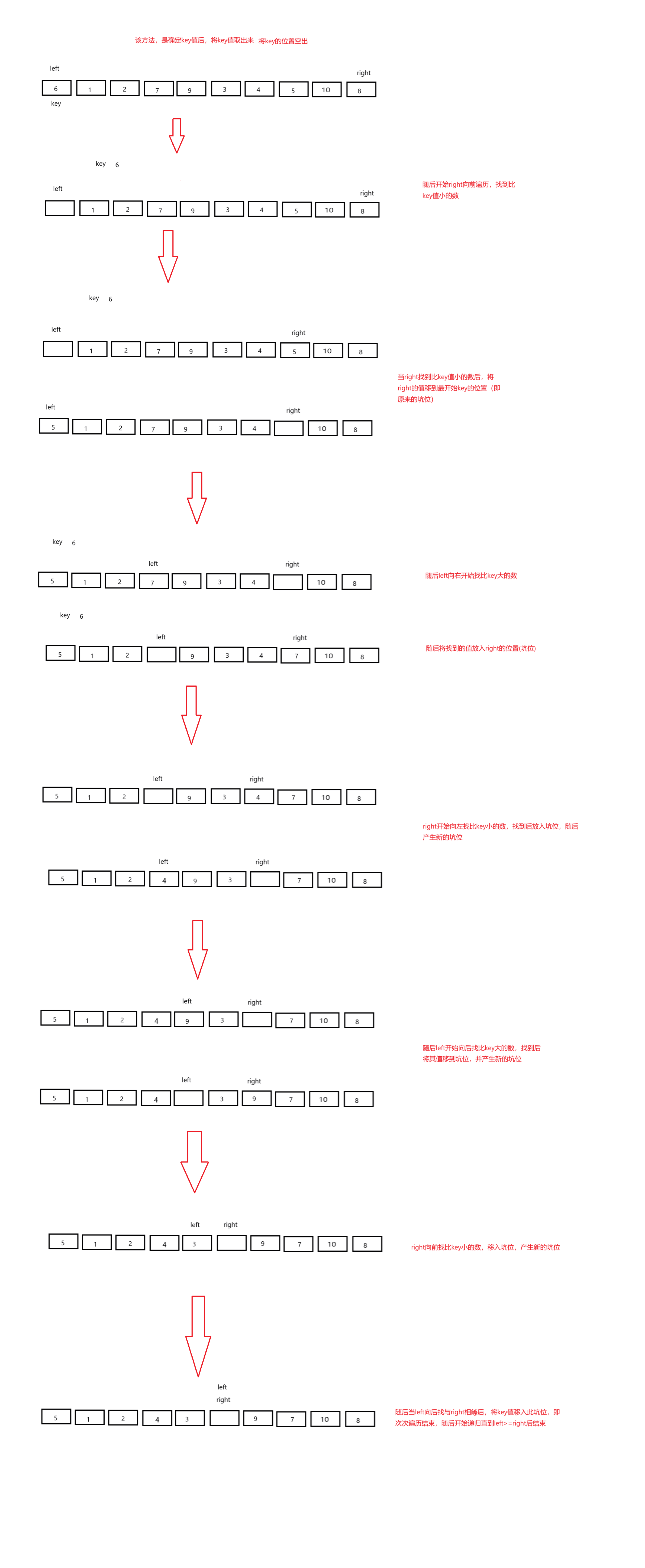
二.挖坑法
步骤展示:
代码:
void QuickSort(int* a, int left, int right)
{
if (left >= right)
{
return;
}
int Pleft = left;
int Pright = right;
int key = a[left];
while (right > left)
{
while (right > left && a[right] >= key)
{
right--;
}
a[left] = a[right];
while (right > left && a[left] <= key)
{
left++;
}
a[right] = a[left];
}
a[left] = key;
QuickSort(a,Pleft,left-1);
QuickSort(a,left+1,Pright);
}三.前后指针法
虽然名字较指针法,但在实际上并没有运用到指针
步骤展示:
int a[] = { 6,1,2,7,9,3,4,5,10,8 };//依旧以该数组为例pre默认为left,cur默认为pre+1
代码:
int PartQsort3(int* a, int left, int right)
{
int keyi = left;
int pre = left;
int cur = pre + 1;
while (cur <= right)
{
if (a[cur] < a[keyi] && ++pre != cur)
{
swap(&a[cur], &a[pre]);
}
cur++;
}
swap(&a[pre], &a[keyi]);
return pre;
}
void QuickSort3(int* a, int left, int right)
{
int keyi = PartQsort3(a,left,right);
QuickSort2(a, left, keyi - 1);
QuickSort2(a, keyi+1, right);
}
非递归版本
前置知识
相关思路
在非递归版本中具体的核心交换可以采用前三种的任意一种,其与前方的本质区别是用栈取代了递归
下图中的区间实际是一个数一个数插入,这里只是为了方便观看,将一个区间写入一个内存块中
代码:
void swap(int* a, int* b)
{
int temp = *a;
*a = *b;
*b = temp;
}
int Partsort(int *a,int left,int right)
{
if (left >= right)
{
return -1;
}
int keyi = left;
while (left < right)
{
while (left < right && a[right] >= a[keyi])
{
right--;
}
while (left < right && a[left] <= a[keyi])
{
left++;
}
swap(&a[left], &a[right]);
}
swap(&a[keyi], &a[left]);
return left;
}//这里采用的hoare版本的快排
void Qucicksort(int *a,int n)
{
ST st1;
STInit(&st1);
STPush(&st1, n - 1);//先压right
STPush(&st1,0);//在压left
while (!STempty(&st1))
{
int begin = STTop(&st1);
STPop(&st1);
int end= STTop(&st1);
STPop(&st1);
int keyi = Partsort(a,begin,end);
if (keyi != -1)
{ //压右区间
STPush(&st1, end);
STPush(&st1, keyi + 1);
//压左区间
STPush(&st1, keyi - 1);
STPush(&st1, begin);
}
}
}下方是栈中的代码
#include<stdio.h>
#include<stdlib.h>
#include<stdbool.h>
#include<assert.h>
//用顺序表实现栈
typedef int STtype;
typedef struct Stack {
STtype* a;
int top;
int capacity;
}ST;
//初始化与销毁
void STInit(ST* p);
void STDestory(ST*p);
//压栈 出栈
void STPush(ST* p,STtype x);
void STPop(ST* p);
//获取栈顶元素
STtype STTop(ST* p);
//获取栈中元素个数
int STSize(ST* p);
//判断栈是否为空
bool STempty(ST* p);
void STInit(ST* p)
{
assert(p);
p->a = NULL;
p->capacity = p->top = 0;
}
//压栈
void STPush(ST* p, STtype x)
{
assert(p);
if (p->top == p->capacity)
{
int newcapcity = p->capacity == 0 ? 4 : p->capacity * 2;
STtype* temp = (STtype*)realloc(p->a, newcapcity*sizeof(STtype));
if(temp==NULL)
{
perror("realloc fail");
exit(1);
}
p->a = temp;
p->capacity = newcapcity;
}
p->a[p->top] = x;
p->top++;
}
//出栈
void STPop(ST* p)
{
assert(p);
assert(p->top > 0);
p->top--;
}
//获取栈顶元素
STtype STTop(ST* p)
{
assert(p);
assert(p->top);
return p->a[p->top - 1];
}
//获取栈中元素个数
int STSize(ST* p)
{
assert(p);
return p->top;
}
//判断栈是否为空
bool STempty(ST* p)
{
assert(p);
return p->top == 0;
}
void STDestory(ST* p)
{
assert(p);
free(p->a);
p->a = NULL;
p->capacity = p->top = 0;
}快排的相关优化:
1.三数取中
在确定key值时,我们总会面临如果key的值最小,那么right向一直向前遍历如下数,或最大,left一直后遍历,都会使速率变慢,最后甚至退化到O(N^2),
因此出现了三数取中,使成为key的数即不是最大也不是最小,这样就可以避免了这种局面
三数的取值分别为数组最左边的数,最右边的数,以及中间的数,比较这三个数找到第二大的数,将其位置与left交换,因此其也不会改变left做key值
int FindMidi(int*a,int left, int right)
{
int midi = (left + right) / 2;
if (a[midi] < a[left])
{
if (a[midi] > a[right])
{
return midi;
}
else if (a[right] > a[left])
{
return left;
}
else
{
return right;
}
}
//a[midi]>a[left]
else {
if (a[left] > a[right])
{
return left;
}
else if (a[midi]>a[right])
{
return right;
}
else {
return midi;
}
}
}2.小区间优化
小区间优化主要运用到了插入排序
将上图每一个圈看成递归所开辟的空间,越到下面区间越小,且开辟的空间越多,因此当我们如果当区间数到达一定数后,不在进行快排而是进行其他类较快处理几个数的排序,那么不仅节省空间,速度也没有较大的影响.
因此小区间优化所选择的为插入排序
下方代码是在hoare基础上加入小区间优化
void swap(int* str1, int* str2)
{
int temp = *str1;
*str1 = *str2;
*str2 = temp;
}
void InsertSort(int* arr, int n)
{
for (int i = 0;i < n-1;i++)
{
int end=i;
int temp = arr[end + 1];
while (end>=0&&arr[end] > temp)
{
arr[end + 1] = arr[end];
end--;
}
arr[end+1] = temp;
}
}
void Quicksort(int* a, int left,int right)
{
if (left >= right)
{
return;
}//n=1时即为left=right,当n<0,left>right
///////////////添加部分//////////////////////////////
if (right - left + 1 < 10)
{
InsertSort(a + left,right-left+1);
}
///////////////////////////////////////////////////
int Pleft = left;
int Pright = right;
int keyi = left;
while (left < right)
{
while (left < right && a[right]>=a[keyi])
{
right--;
}
while (left < right && a[left]<=a[keyi])
{
left++;
}
swap(&a[left], &a[right]);
}
swap(&a[keyi], &a[left]);
Quicksort(a, Pleft, left - 1);
Quicksort(a, left + 1, Pright);
}3.自省排序
在一些特别极端的情况下,例如,左区间一个数,右区间几百万个数,这样最后会由于递归的层次过于深,导致递归会遇见一个常见的问题即为栈溢出
那么如何处理该问题呢,那就是这里所说的自省排序,当深度到达一定程度后结束继续递归的排序,进行堆排序,来避免出现堆溢出的情况
一般将最大深度设为标准深度(即每次都是在区间中间分步)的二倍,如下图
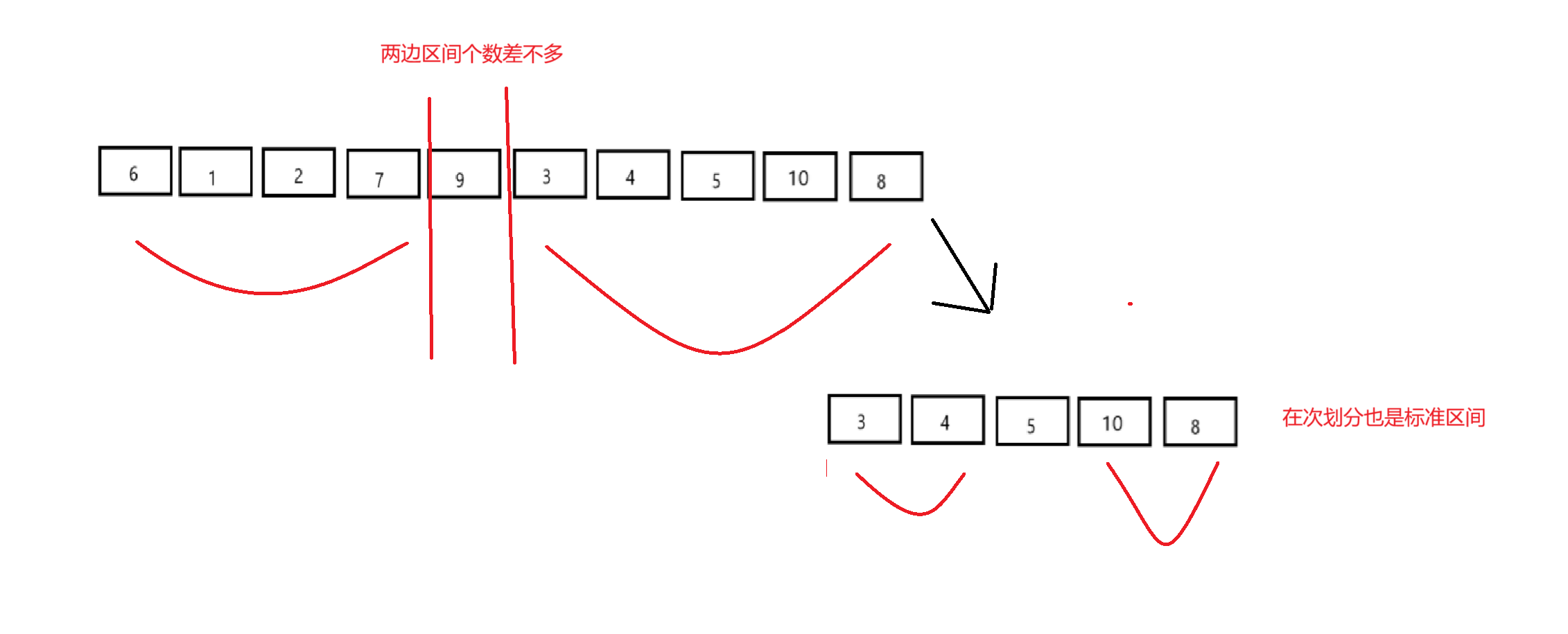
对于深度如何求,即可以参照二叉数的深度计算,当左右均匀分步时,其类似于二叉数,因此深度为logN
代码:
void AdjustDown(int* a, int n, int paraent)
{
int child = paraent * 2 + 1;
while (child < n)
{
if (child+1<n&&a[child] < a[child + 1])
{
child = child + 1;
}
if (a[child] > a[paraent])
{
swap(&a[child], &a[paraent]);
paraent = child;
child = paraent * 2 + 1;
}
else
{
break;
}
}
}
void HeapSort(int* a, int n)
{
for (int i = (n - 1 - 1) / 2;i >= 0;i--)
{
AdjustDown(a, n, i);
}
int end = n - 1;
while (end > 0)
{
swap(&a[0], &a[end]);
AdjustDown(a, end, 0);
end--;
}
}
void InsertSort(int* arr, int n)
{
for (int i = 0;i < n-1;i++)
{
int end=i;
int temp = arr[end + 1];
while (end>=0&&arr[end] > temp)
{
arr[end + 1] = arr[end];
end--;
}
arr[end+1] = temp;
}
}
int PartQsort(int* a, int left, int right)
{
int ret = FindMidi(a, left, right);
swap(&a[ret], &a[left]);
int keyi = left;
int pre = left;
int cur = pre + 1;
while (cur <= right)
{
if (a[cur] < a[keyi] && ++pre != cur)
{
swap(&a[cur], &a[pre]);
}
cur++;
}
swap(&a[pre], &a[keyi]);
return pre;
}
void _QuickSort(int* a, int left, int right, int depth, int curdep)
{
int N = right - left + 1;//总数
if (N < 16)
{
InsertSort(a + left, N);
return;
}
/////////////////核心////////////////////////////////////
if (curdep > depth)
{
HeapSort(a+left, N);
}
//////////////////////////////////////////////////////////
else
{
int keyi = PartQsort(a, left, right);
_QuickSort(a, left, keyi - 1, depth, curdep+1);
_QuickSort(a, keyi+1,right, depth, curdep+1);
}
}
void QuickSort(int* a, int left, int right)//自省排序
{
int N = right - left + 1;//总数
int curdep=0;
int depth = 0;
for (int i = 1;i <= N;i*=2)
{
depth++;
}
_QuickSort(a,left,right,depth*2,curdep+1);
}4.三路划分(不常用)
当一个快排有了自省机制后,基本上不会用到三路划分,三路划分与前方几种优化机制不同,其主要是对单次遍历进行改变

主要在遇到重复数比较多时,利用三路划分可以避免出现栈溢出的现象,但是有了自省则可避免栈溢出,此外三路划分频繁的交换也增添了消耗.
代码
void swap(int* str1, int* str2)
{
int temp = *str1;
*str1 = *str2;
*str2 = temp;
}
void ThreeQuicksort(int *a,int left ,int right)
{
if (left >= right)
{
return;
}
int Pleft = left;
int Pright = right;
int key = a[left];
int cur = left + 1;
while (cur <= right)
{
if (a[cur] < key)
{
swap(&a[left], &a[cur]);
++left;
++cur;
}
else if (a[cur] == key)
{
++cur;
}
else
{
swap(&a[right], &a[cur]);
right--;
}
}
ThreeQuicksort(a,Pleft,left-1);
ThreeQuicksort(a,right+1,Pright);
}总结:
- 时间复杂度:O(N*logN)
- 空间复杂度:O(logN)(因为需要不断的开栈,二分划分区间不断向下开空间)
- 稳定性:不稳定.

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)