人形机器人非接触式传感技术:电容式传感
本文介绍了电容式传感技术在VMS机械手触觉感知中的应用。首先分析了四种电容传感技术的工作原理和特点:表面电容式、投射电容式、电感-电容谐振式及功能材料型。重点阐述了该技术在机器人电子皮肤、接近觉感知、灵巧手操作和人机交互等领域的应用进展。同时指出了当前存在环境干扰敏感、寄生电容影响、测量距离受限等挑战。最后展望了新材料研发、先进制造工艺、多模态融合和AI赋能等发展方向,指出柔性化、无线化和智能化将
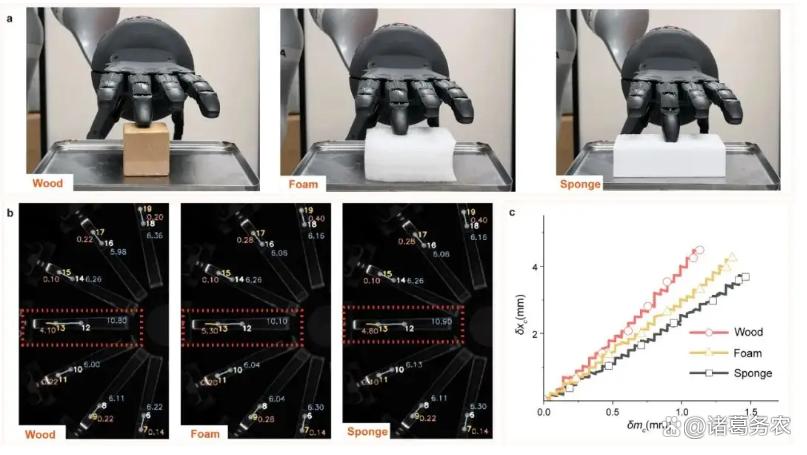
VMS机械手触觉感知测量物体物理属性
一、技术种类与工作原理
电容式传感技术依据其结构、应用场景和原理,主要可分为以下几类:
1. 表面电容式(Surface Capacitive Sensing)
工作原理:传感器表面有一个均匀的导电层(如ITO)作为电极。当导体(如手指)触摸时,会与传感器表面电极形成一个耦合电容,引起电容变化。控制器通过检测四角或边缘的电流变化来确定触摸点位置。
特点:结构相对简单,成本较低。但只能识别导体接触,易受环境温湿度影响,且通常不支持多点触控。
2. 投射电容式(Projected Capacitive Sensing, 简称P-Cap或PCA)
工作原理:采用纵横交错、图案化的透明电极阵列(如菱形图案)形成电场。手指(无论是导体还是绝缘体,后者通过介电常数变化)靠近或触摸时,会干扰电极间原本的电场分布,引起电极间互电容(Mutual Capacitance) 或自电容(Self-Capacitance) 的变化。通过扫描矩阵,可以精确定位触摸点。
特点:这是当前主流技术。可穿透保护盖板(如玻璃、亚克力)进行感知,支持多点触控,抗干扰能力更强。设计更为复杂,需要专用控制芯片(IC)和算法。
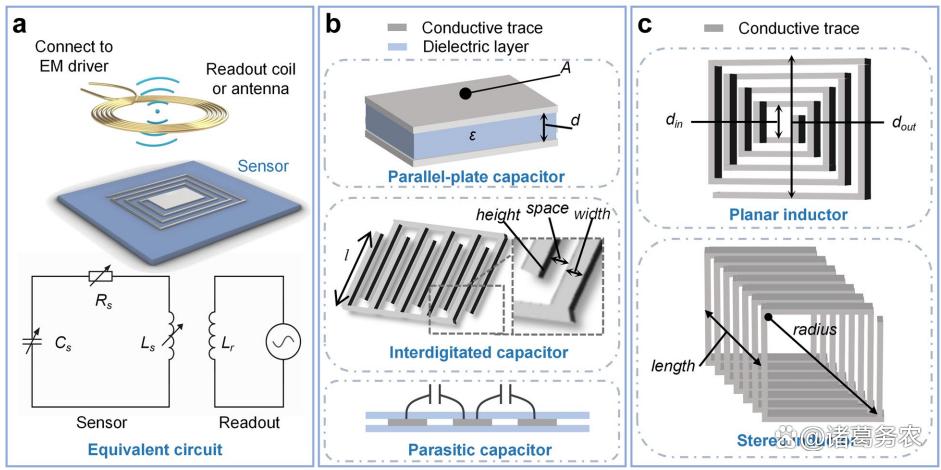
3. 电感-电容(LC)谐振式(无线无源)
工作原理:将电容敏感单元与电感线圈集成,形成一个LC谐振电路。其谐振频率 会随着传感电容C的变化而改变。外部读取线圈通过磁耦合(Magnetic Coupling) 方式为LC电路提供能量并读取谐振频率的偏移,从而反推出引起电容变化的物理量(如压力、应变、湿度等)。整个过程无需电池和物理连线。
特点:非常适合难以布线和更换电池的场合,如柔性电子皮肤、植入式传感器。但读取距离通常较短(毫米到厘米级),系统设计和频率解调具有一定复杂性。
无线无源LC传感器的电感-电容谐振电路
4. 基于功能材料的特异型电容传感
工作原理:利用钯(Pd)、氧化石墨烯、聚酰亚胺(PI) 等对特定目标(如氢气、湿度、特定化学物质)敏感的功能材料作为电容的电极或介电层。当敏感材料与目标物作用后,其介电常数或体积会发生改变,从而引起电容变化。
例如:一项研究采用钯纳米粒子(Pd NPs) 修饰的三维叉指电极(3D IDE)来检测氢气,氢气在Pd表面吸附形成钯氢化物(PdHx)引起晶格膨胀,改变了电极的有效间距和面积,从而实现高灵敏度、高选择性的室温氢气检测。
特点:专一性强、灵敏度高。但材料制备和传感器稳定性往往是挑战。
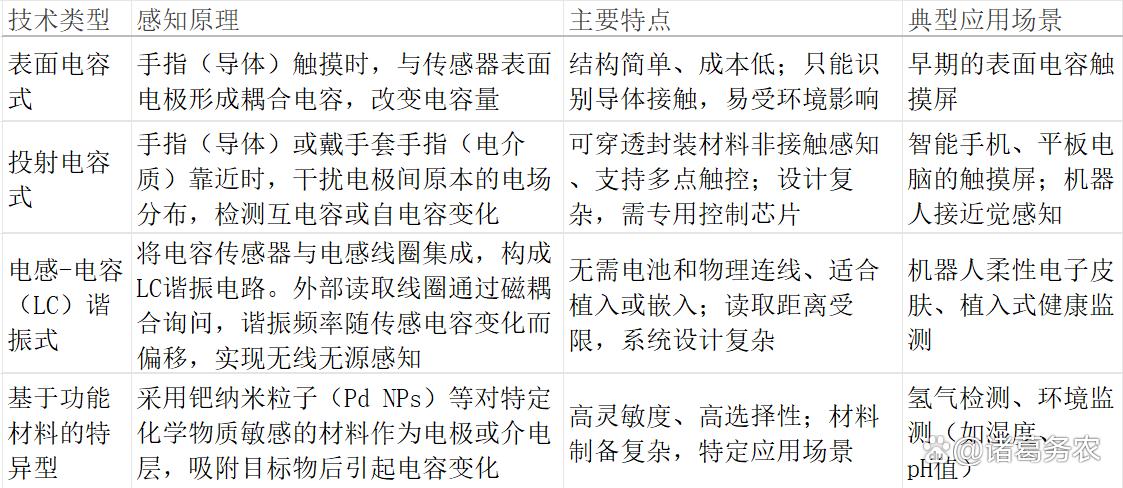
电容式传感器主要技术类型和特点
二、在人形机器人中的应用进展
电容式传感技术以其非接触感知、灵敏度高、易于柔性化等特点,在人形机器人中找到了多样化的应用场景:
1. 电子皮肤(E-Skin)与触觉感知:
这是电容式传感最具前景的应用之一。柔性电容式压力传感器可以像“皮肤”一样覆盖机器人全身或关键部位(如手掌、指尖),实时监测压力分布和触觉信息。
例如,特斯拉在其Optimus Gen 3机器人的灵巧手上就采用了电容式和压阻式混合的电子皮肤方案(指尖用MEMS电容式,手掌用薄膜压阻式),以获取更精确的触觉力测量(电容式可测量三维力)和更好的数据采集效率。
国内厂商如汉威科技(能斯达)、兆威机电(途见科技) 等也在积极推进压阻和电容混合方案的电子皮肤。
华东理工大学开发了一种集成了电容式压力传感和蛇形弯曲传感电路的电子皮肤贴片系统,可同时监测抓取压力和手指关节弯曲角度,为灵巧操作提供多模态反馈。
2. 接近觉感知(Proximity Sensing)与安全防撞:
投射电容式传感器可以用于在机器人身体表面(如手臂、躯干)形成无形的“接近场”。当人或物体靠近到一定距离但尚未发生物理接触时,机器人就能提前感知并减速或停止运动,极大提升了人机协作(HRC)的安全性。
3. 灵巧手操作与物体识别:
在机器人灵巧手上,电容传感器可以:
辅助抓取:在接触发生前预感知物体的大致轮廓和位置,引导手部进行预形位调整。
材质识别:不同材质的介电常数不同,通过电容信号的特征可能辅助区分物体材质(如金属、塑料、木材)。
滑移检测:通过高频检测抓握过程中电容信号的微小变化,可以判断物体是否即将发生滑移,从而及时调整抓握力。
4. 人机交互(HMI):
电容触摸屏和触摸按键已是成熟技术,可用于机器人的控制面板,实现直观的人机交互。此外,基于接近觉的电容传感也能实现非接触式的手势控制。
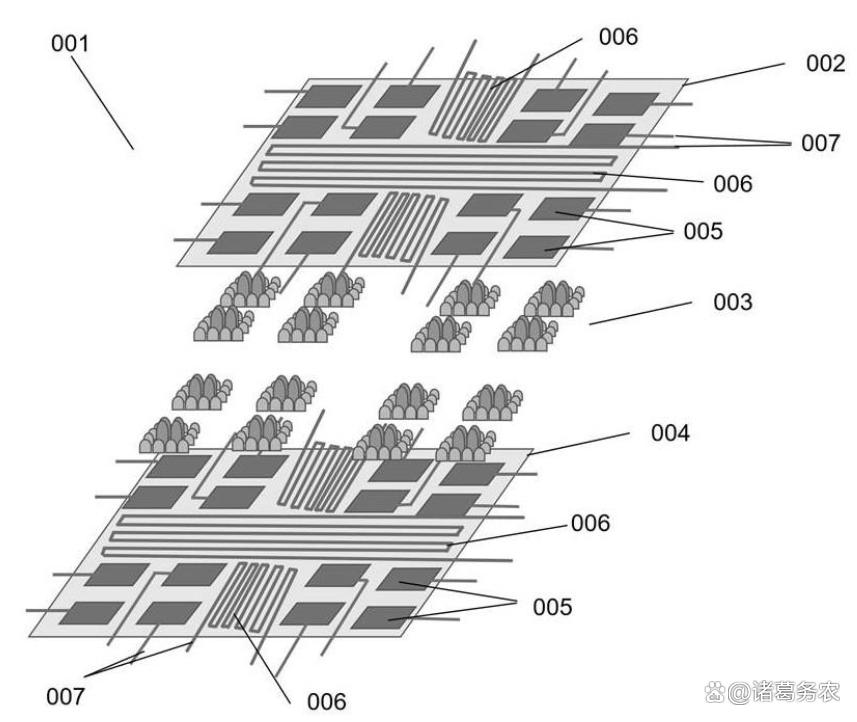
机器人电子皮肤贴片系统
三、不足与限制
尽管电容式传感技术优势突出,但在实际应用中仍面临一些挑战和局限:
1. 环境干扰敏感性强
电容传感器易受环境温度、湿度变化的影响,因为空气和许多材料的介电常数会随之改变,导致基线漂移或测量误差。
容易受到附近导体或电介质的干扰,以及电磁干扰(EMI) 的影响,需要良好的屏蔽和信号处理算法。
2. “寄生电容”的影响
传感器本身的电极对地、引线之间都存在不可避免的寄生电容。这些寄生电容会降低系统的灵敏度,并引入噪声,使得测量微小电容变化(常在fF级)变得困难。
3. 测量距离与精度限制
基于电场的电容式传感,其有效感知距离通常较短,尤其是对于精度要求高的应用。
测量精度和分辨率虽然很高,但要达到极高精度(如微米级以上的定位),对传感器设计、信号调理电路和解算算法的要求非常苛刻。
4. 标定与复杂性
电容传感器的输出与被测量之间的关系可能是非线性的,需要进行复杂的标定。
尤其是对于需要高精度或多点测量的应用,信号调理电路可能比较复杂,增加了系统设计的难度和成本。
5. 柔性化与集成化的挑战
虽然柔性电容传感器是研究热点,但如何保证其在反复弯曲、拉伸下的耐久性、稳定性,以及如何实现高密度、大规模阵列的集成与信号读出,仍然是需要解决的问题。
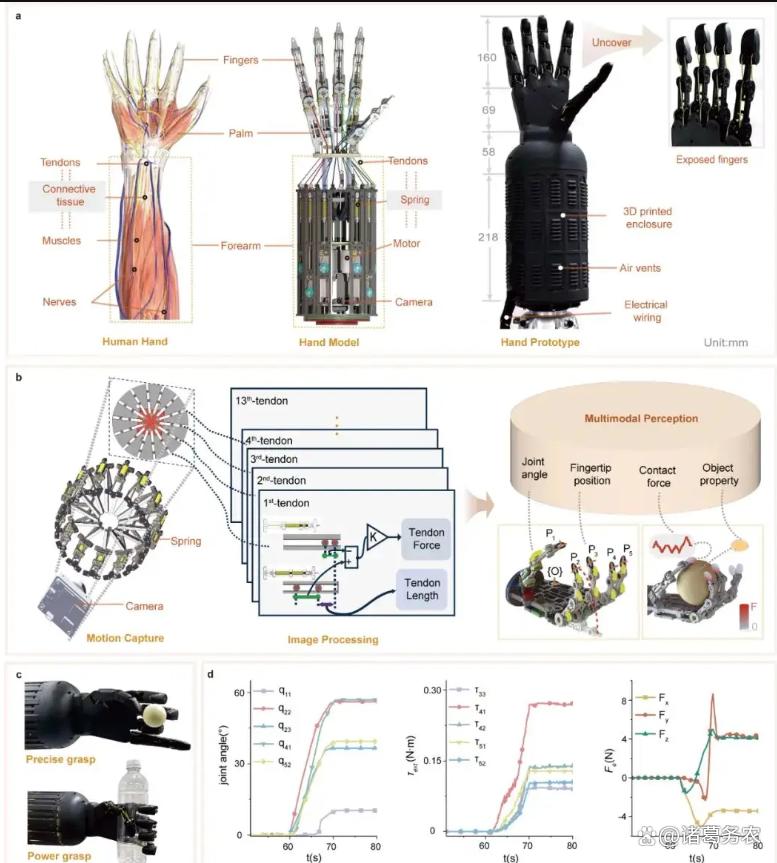
基于单目视觉的多模态绳驱灵巧手设计
四、重点难点、主攻方向与前技术前沿
1. 新材料与创新结构
新型介电材料与结构:研发具有高介电常数、多孔或微结构(如金字塔、晶格)的弹性介电层是提升电容式压力传感器灵敏度和量程的关键。例如,研究通过3D打印技术制造金刚石(diamond)晶格结构的介电层,将灵敏度提升至0.827 kPa⁻¹。
柔性透明电极材料:探索银纳米线(AgNWs)、碳纳米管(CNTs)、石墨烯等替代传统的ITO,以获得更好的柔韧性和稳定性。
功能敏感材料:如用于氢气检测的钯纳米粒子(Pd NPs),用于湿度检测的聚酰亚胺(PI) 等,赋予电容传感器特异性的感知能力。
2. 先进制造工艺
增材制造(3D打印):用于快速成型复杂的电极图案和三维介电层微结构,实现定制化和高性能传感器制造。
MEMS(微机电系统)技术:用于制造小型化、低功耗、高一致性的电容传感器,例如特斯拉灵巧手指尖采用的MEMS电容式传感器和用于氢气检测的3D叉指电极(3D IDE)。
3. 无线无源与集成化
电感-电容(LC)谐振式传感器:通过磁耦合实现无线无源的读取,极大简化了柔性电子皮肤和植入式传感器的系统集成难度,是前沿研究方向之一。
4. 多模态传感融合
电容-压阻混合方案:正如特斯拉和智元机器人所采用的策略,结合电容式(高灵敏度、可测多维力) 和压阻式(成本较低、稳定性好) 的优势,两者互补,提升整体感知的鲁棒性。
与视觉等其他传感器融合:将电容传感提供的触觉、接近觉信息与摄像头提供的视觉信息相结合,通过人工智能算法进行融合处理,构建对环境更全面、更可靠的理解。
5. 人工智能赋能
利用机器学习(尤其是深度学习) 算法处理电容传感器阵列产生的高维数据,用于目标识别、材质分类、手势识别等复杂任务。
开发自适应补偿算法,以降低环境温湿度变化和电磁干扰对测量结果的影响。
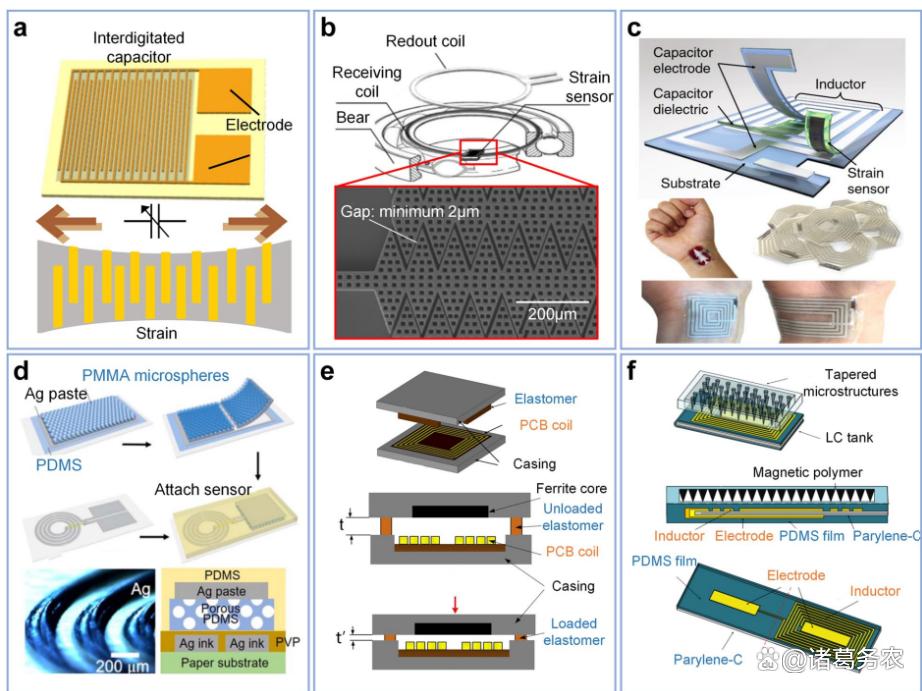
无线无源电感-电容(LC)力学传感
五、总结与展望
电容式传感技术凭借其高灵敏度、非接触感知能力、易于柔性化集成的特点,已成为人形机器人获取触觉、接近觉信息的重要途径之一,对于实现安全、灵巧的人机交互至关重要。
其发展正呈现出以下清晰趋势:
融合化:与其他传感原理(如压阻)混合,与视觉等其他模态传感器融合,取长补短。
智能化:与AI算法深度结合,从数据中提取更深层的信息。
柔性化与无线化:向柔性、可拉伸、无线无源的“电子皮肤”形态演进,更适合覆盖机器人复杂曲面。
微型化与高性能化:通过MEMS工艺和新型微结构设计,不断提升性能的同时减小体积。
未来的理想状态是,人形机器人将拥有一层高度集成、多功能、自适应的“智能电容皮肤”,它能无声地感知微妙的触觉、预告即将发生的接触、甚至感知环境的化学变化,让机器人真正以一种更安全、更智能的方式融入人类世界。
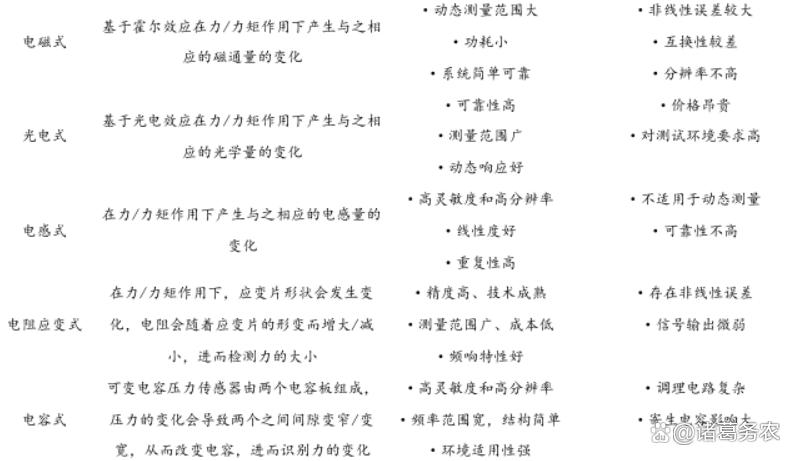
力传感器不同检测方法优缺点对比
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 41
41 0
0- 0



 已为社区贡献37条内容
已为社区贡献37条内容

所有评论(0)