011-从0到1带你深入并发编程:AQS同步队列入队机制深度解析:CAS自旋与虚拟头节点的精妙设计
摘要:本文深入解析Java并发编程中AQS同步队列的核心机制,重点剖析addWaiter和enq方法的实现原理。通过CAS自旋操作确保线程安全,采用虚拟头节点设计简化边界处理。文章详细阐述了双向链表结构的维护策略、内存可见性保障及指针设置顺序的重要性,并探讨了高并发场景下的性能优化方法。这些精妙设计体现了乐观并发控制和最终一致性原则,为高并发系统开发提供了宝贵参考。
🥂(❁´◡`❁)您的点赞👍➕评论📝➕收藏⭐➕关注👀是作者创作的最大动力🤞
💖📕🎉🔥 支持我:点赞👍+收藏⭐️+留言📝+关注👀欢迎留言讨论
🔥🔥🔥(源码获取 + 调试运行 + 问题答疑)🔥🔥🔥 有兴趣可以联系我
🔥🔥🔥 文末有往期免费源码,直接领取获取(无删减,无套路)
我们常常在当下感到时间慢,觉得未来遥远,但一旦回头看,时间已经悄然流逝。对于未来,尽管如此,也应该保持一种从容的态度,相信未来仍有许多可能性等待着我们。
引言
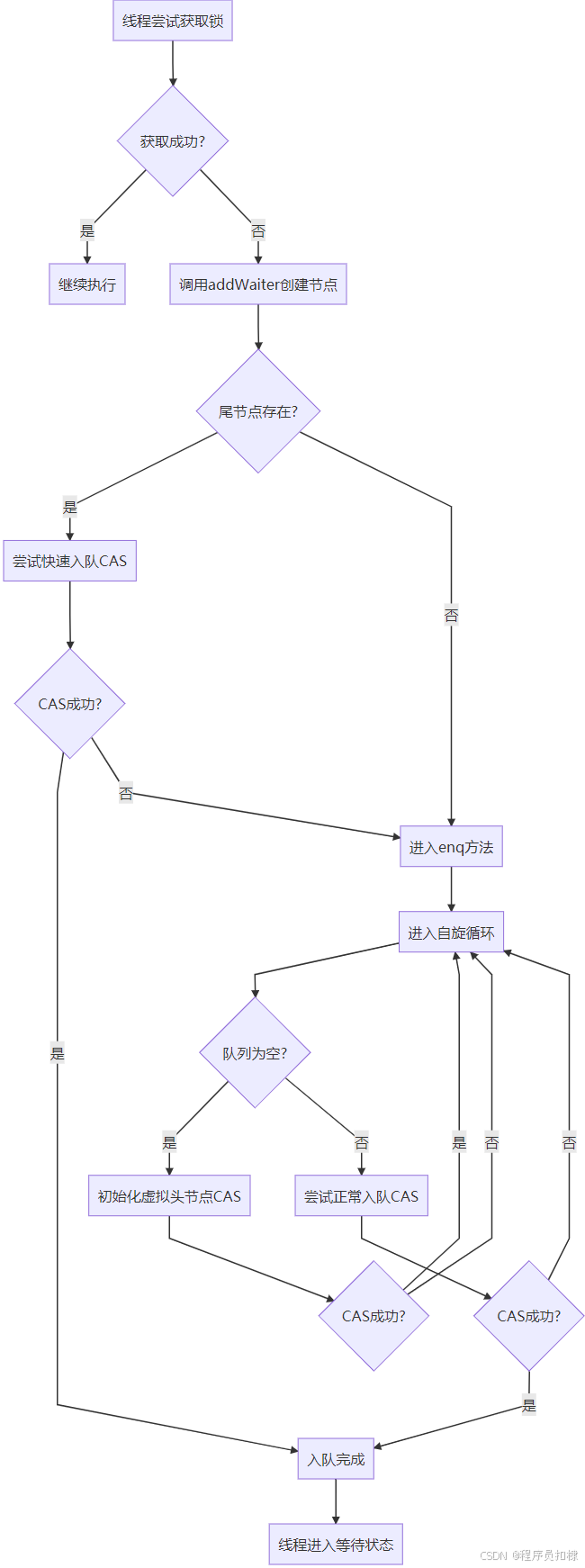
在Java并发编程中,AbstractQueuedSynchronizer(AQS)的同步队列是其实现各种同步器的核心数据结构。当线程获取锁失败时,它会被包装成Node节点加入到同步队列尾部等待。这个过程看似简单,实则蕴含着精妙的并发设计思想。本文将深入剖析addWaiter方法和enq方法的实现原理,重点解读CAS自旋操作如何保证线程安全,以及虚拟头节点设计的深层考量。
addWaiter方法:入队操作的第一道防线
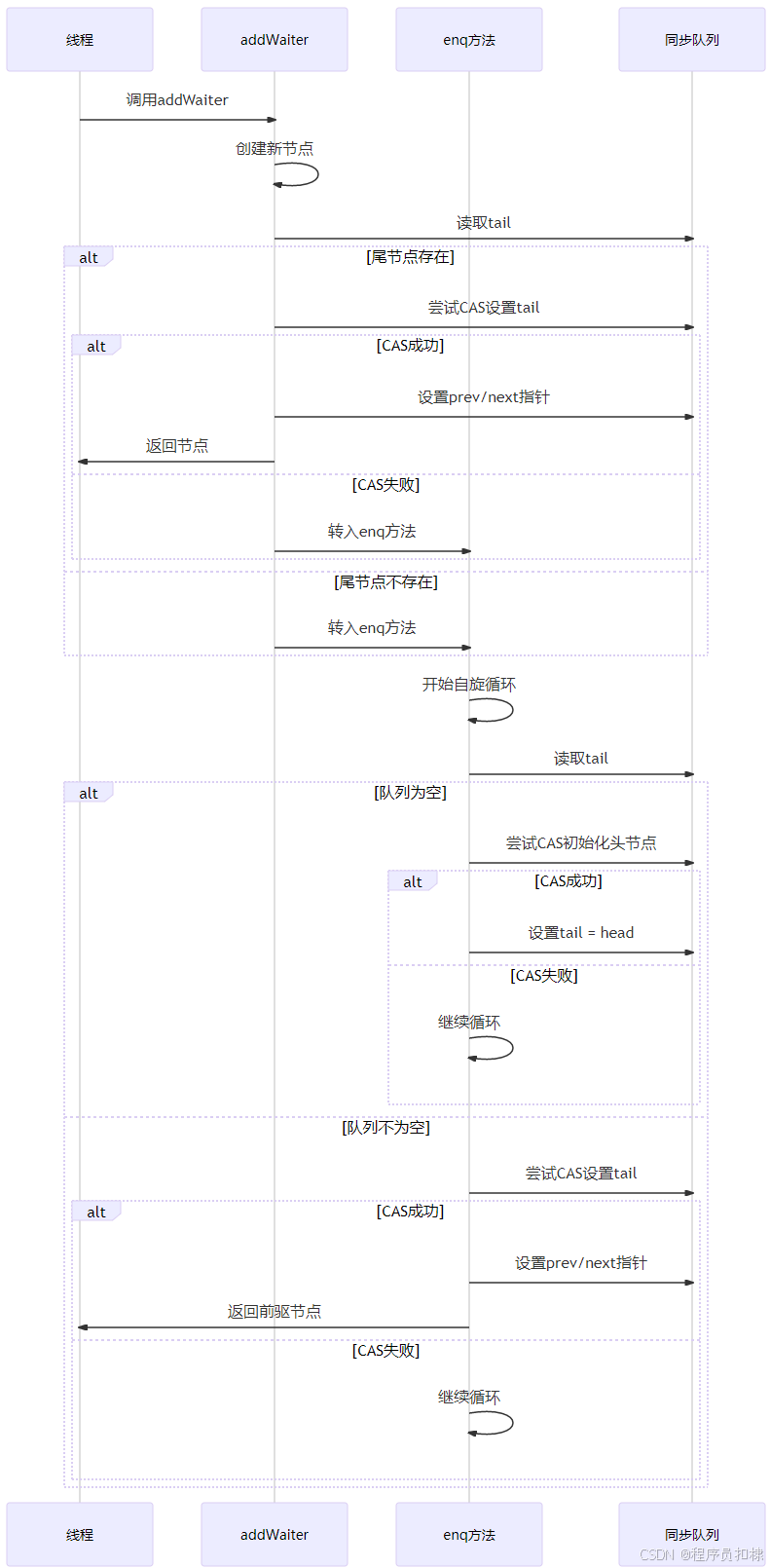
addWaiter(Node mode)方法是节点入队的入口点,它尝试以最直接的方式将新节点添加到队列尾部。
private Node addWaiter(Node mode) {
Node node = new Node(Thread.currentThread(), mode);
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
enq(node);
return node;
}快速路径尝试
方法首先尝试"快速路径":如果尾节点不为空,直接通过CAS操作将新节点设置为尾节点。这种设计体现了"乐观锁"的思想——在低竞争情况下,大多数入队操作可以在一次CAS尝试中完成。
关键步骤解析:
-
创建节点:用当前线程和指定模式(SHARED或EXCLUSIVE)创建新节点
-
读取尾节点:获取当前尾节点的引用,这是一个易失性读取
-
设置前驱指针:先将新节点的prev指向当前尾节点
-
CAS竞争尾节点:尝试原子性地将尾指针从pred改为node
-
设置后继指针:CAS成功后,将原尾节点的next指向新节点
前驱指针设置的奥秘
细心的读者可能会发现,在CAS操作之前就先设置了node.prev = pred。这个顺序至关重要,它确保了即使其他线程在此时修改了队列结构,当前线程也能通过prev指针找到正确的前驱节点。
这种"先设置prev,后CAS tail"的顺序设计,是AQS实现中的一个精妙之处,它保证了即使在并发环境下,队列的双向链表结构也不会被破坏。
enq方法:自旋重试的最终保障
当快速路径失败时(可能是队列为空或CAS竞争失败),enq方法作为后备机制开始工作。
private Node enq(final Node node) {
for (;;) {
Node t = tail;
if (t == null) { // 队列必须初始化
if (compareAndSetHead(new Node()))
tail = head;
} else {
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}虚拟头节点的初始化
当检测到队列为空(t == null)时,enq方法不会直接插入传入的节点,而是先创建一个虚拟节点(dummy node)作为头节点。
为什么需要虚拟头节点?
-
统一边界处理:虚拟头节点使得队列永远不为空,简化了边界条件的处理逻辑。在后续的出队、唤醒等操作中,无需反复检查头节点是否为null。
-
状态管理的需要:头节点通常承载着特殊的状态管理职责。比如在释放锁时,需要检查头节点的状态来决定是否唤醒后继节点。虚拟节点为这些操作提供了统一的载体。
-
竞争避免:如果多个线程同时检测到队列为空,虚拟节点的初始化通过CAS操作保证了只有一个线程能够成功创建头节点,其他线程会继续自旋重试。
CAS自旋的深入分析
enq方法采用无限循环+CAS的模式,这是无锁编程的典型范式。
自旋过程:
-
读取当前尾节点
-
如果队列为空,尝试初始化虚拟头节点
-
如果队列不为空,尝试将新节点设置为尾节点
-
如果CAS失败,回到步骤1继续尝试
CAS竞争的影响: 在低并发场景下,CAS自旋通常很快成功。但在高并发场景下,可能出现:
-
CPU资源消耗:大量线程在自旋循环中消耗CPU资源
-
缓存一致性流量:频繁的CAS操作导致缓存行在多个CPU核心间频繁同步
-
性能下降:当竞争激烈时,入队操作的整体吞吐量会下降
线程安全性保障机制
内存可见性保证
AQS通过volatile变量和CAS操作共同保证了内存可见性:
-
head和tail使用volatile修饰,确保所有线程看到的都是最新值 -
CAS操作本身具有内存屏障效果,保证操作前后的内存可见性
-
节点中的
prev和next指针也是volatile的
指令重排防护
在节点入队过程中,指针的设置顺序经过精心设计:
// 正确的顺序:
node.prev = pred; // 步骤1
if (compareAndSetTail(pred, node)) { // 步骤2
pred.next = node; // 步骤3
}这个顺序确保了即使步骤2和步骤3之间发生线程切换,其他线程也能通过prev指针遍历到完整的队列。
实际应用中的性能考量
自旋优化的实践
虽然AQS本身没有对高并发场景下的CAS竞争做特殊优化,但在实际使用中,我们可以通过以下方式减少竞争:
-
减少锁竞争:优化业务逻辑,减少同时争用同一把锁的线程数
-
使用读写锁:在读多写少的场景下使用ReadWriteLock
-
锁分离:将一个大锁拆分为多个小锁
虚拟头节点的生命周期
虚拟头节点在队列中存活的时间很短。当第一个等待节点被唤醒并成功获取锁后,它会成为新的头节点,原虚拟头节点会被GC回收。这种设计既保证了正确性,又避免了长期的内存占用。
设计思想的延伸
AQS的入队机制体现了几个重要的分布式系统设计原则:
-
最终一致性:通过自旋重试保证操作的最终成功
-
乐观并发控制:假设竞争不激烈,先尝试快速路径
-
优雅降级:快速路径失败时,降级到完整的自旋重试逻辑
这些原则不仅在AQS中适用,在分布式锁、分布式事务等场景中也有广泛应用。
总结
AQS的节点入队机制通过addWaiter和enq方法的配合,构建了一个既高效又可靠的线程排队系统。CAS自旋保证了线程安全,虚拟头节点简化了边界处理,指针设置的精心顺序维护了数据结构的一致性。
理解这些底层机制,不仅有助于我们更好地使用JUC包中的同步器,更能提升我们在高并发场景下的系统设计能力。当我们面对复杂的并发问题时,AQS中这些经过千锤百炼的设计模式,往往能为我们提供宝贵的借鉴意义。
「在线考试系统源码(含搭建教程)」 (无删减,无套路):🔥🔥🔥
链接:https://pan.quark.cn/s/96c4f00fdb43 提取码:WR6M
往期免费源码对应视频:
免费获取--SpringBoot+Vue宠物商城网站系统
🥂(❁´◡`❁)您的点赞👍➕评论📝➕收藏⭐➕关注👀是作者创作的最大动力🤞
💖📕🎉🔥 支持我:点赞👍+收藏⭐️+留言📝+关注👀欢迎留言讨论
🔥🔥🔥(源码 + 调试运行 + 问题答疑)
🔥🔥🔥 有兴趣可以联系我
💖学习知识需费心,
📕整理归纳更费神。
🎉源码免费人人喜,
🔥码农福利等你领!💖常来我家多看看,
📕网址:扣棣编程,
🎉感谢支持常陪伴,
🔥点赞关注别忘记!💖山高路远坑又深,
📕大军纵横任驰奔,
🎉谁敢横刀立马行?
🔥唯有点赞+关注成!
⬇⬇⬇⬇⬇⬇⬇⬇⬇⬇点击此处获取源码⬇⬇⬇⬇⬇⬇⬇⬇⬇

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 20
20 0
0- 0



 已为社区贡献18条内容
已为社区贡献18条内容

所有评论(0)