无人机编队控制:让科技与飞行更有趣
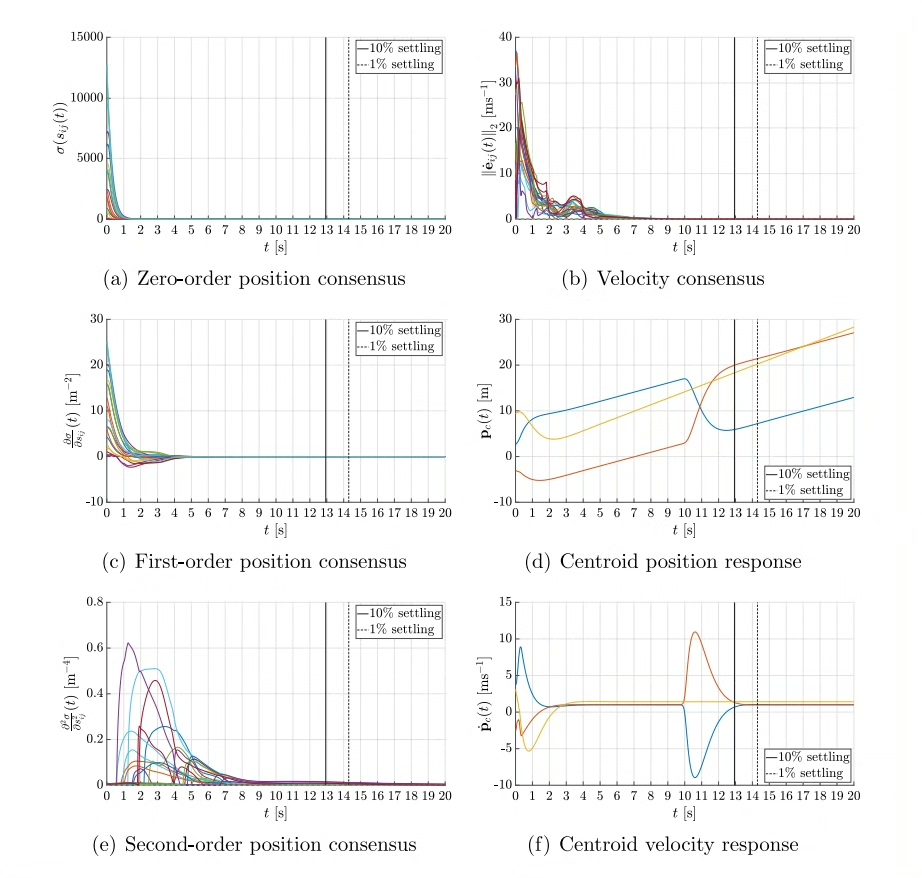
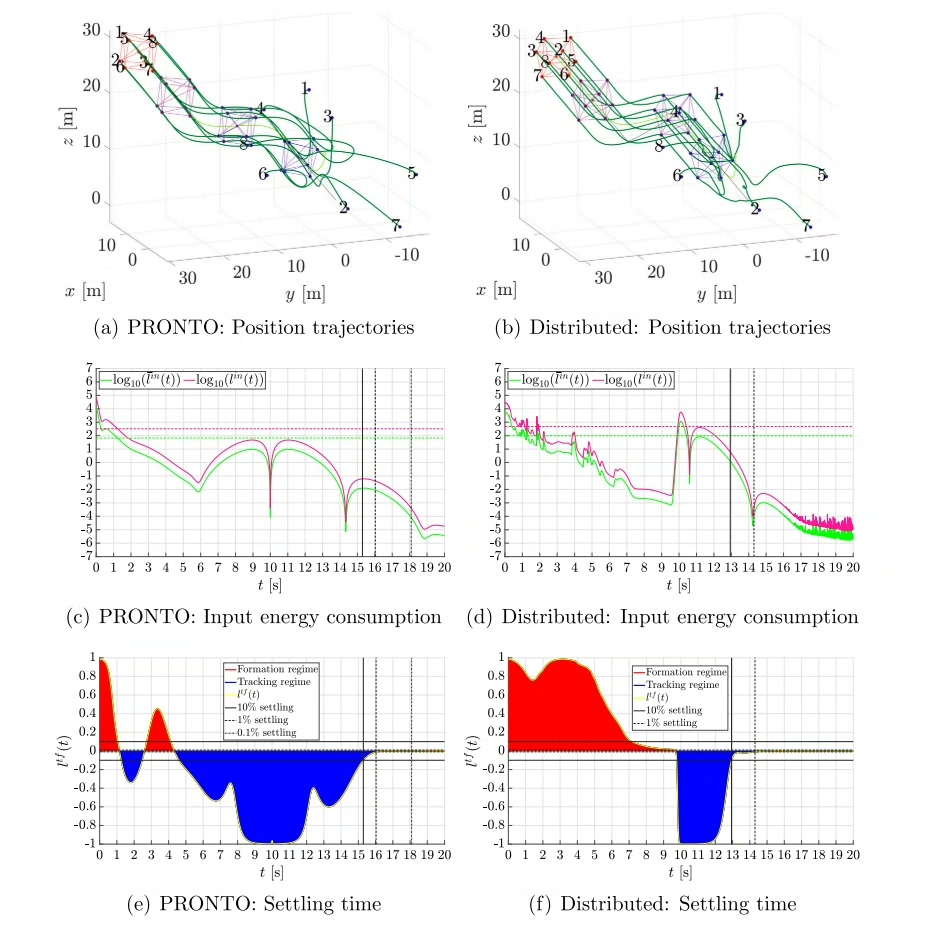
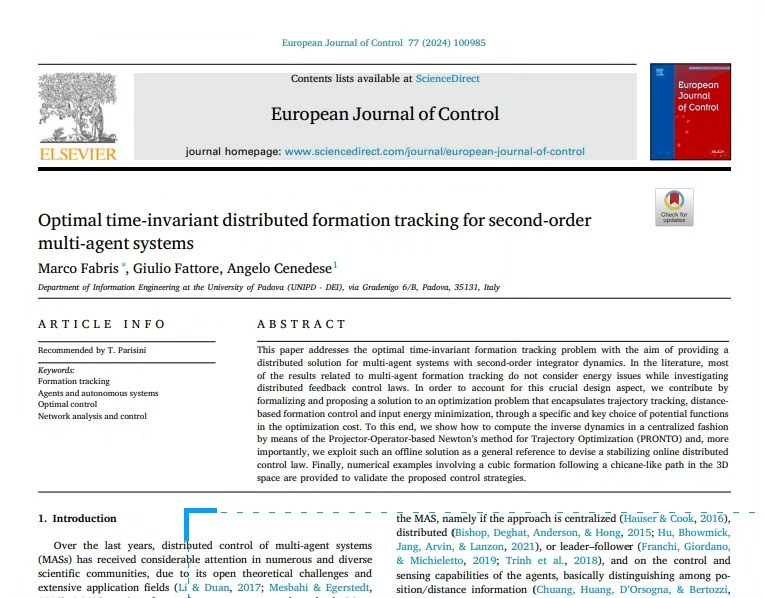
2024EJC《二阶多智能体系统的最优时不变分布式编队跟踪控制算法》 MATLAB(代码+文献)多智能体 复现 二阶 分布式编队 控制 无人机 本文探讨了最优时不变编队跟踪问题,旨在为具有二阶积分器动力学的多智能体系统提供分布式解决方案。 在相关文献中,大多数关于多智能体编队跟踪的研究在研究分布式反馈控制律时并未考虑能量问题。 为了弥补这一关键设计方面的不足,我们通过在优化成本中选择特定且关键的势能函数,对包含轨迹跟踪、基于距离的编队控制和输入能量最小化的优化问题进行了形式化表述并提出了解决方案。 为此,我们展示了如何通过基于投影算子的牛顿法(PRONTO)以集中方式计算逆动力学,更重要的是,我们将这种离线解决方案作为通用参考,以设计出一种稳定的在线分布式控制律。 最后,通过在三维空间中跟随类似弯道路径的立方体编队的数值示例,验证了所提出的控制策略。

近年来,无人机编队技术在农业、物流、应急救援等领域得到了广泛应用。然而,如何实现无人机编队的稳定跟踪与编队优化,仍然是一个亟待解决的技术难题。本文将介绍一种基于最优时不变分布式编队跟踪控制算法的MATLAB复现方法,为无人机编队控制提供新的解决方案。
什么是二阶多智能体系统?
二阶多智能体系统指的是每个无人机具有质量和惯性,可以进行加速度控制的系统。这类系统在建模时需要考虑每个无人机的加速度、速度和位置状态。在无人机编队控制中,二阶系统模型更为准确,因为它可以反映无人机的运动特性。
为什么需要分布式控制?
分布式控制是指通过每个无人机的局部信息进行控制,而不依赖于全局信息。这种控制方式具有良好的扩展性和容错性。然而,分布式控制在设计时往往面临两个关键问题:如何保证编队的稳定性,以及如何优化控制能量。
论文的核心贡献
本文提出了一种基于最优时不变分布式编队跟踪控制算法。通过在优化成本中选择特定的势能函数,我们将编队跟踪、基于距离的编队控制和输入能量最小化统一在一个框架中。这种设计使得编队跟踪不仅稳定,而且能量消耗最小。
代码实现:无人机编队的MATLAB复现
为了验证算法的有效性,我们编写了以下MATLAB代码。代码中,我们首先初始化无人机的数量、编队目标轨迹和初始状态。然后,通过PRONTO算法设计控制律,最后进行数值模拟。
% 初始化参数
n = 4; % 无人机数量
T = 10; % 总时间
dt = 0.1; % 时间步长
N = T/dt; % 时间步数
% 状态变量
x = zeros(n, N+1); % 位置
v = zeros(n, N+1); % 速度
a = zeros(n, N); % 加速度% 编队目标轨迹
target = [sin(0:dt:10), cos(0:dt:10)]'; % 示例轨迹
% 初始化状态
x(:,1) = randn(n,1); % 随机初始位置
v(:,1) = zeros(n,1); % 初始速度为零
a(:,1) = zeros(n,1); % 初始加速度为零
% 设计控制律
for i = 1:N
% 计算相对位置
rel_pos = x - target(i,:);
% 计算势能函数
phi = rel_pos(:,1).*(rel_pos(:,1)) + rel_pos(:,2).*(rel_pos(:,2));
% 计算控制输入
u = -phi * rel_pos;
% 更新状态
a(:,i) = u;
x(:,i+1) = x(:,i) + v(:,i)*dt;
v(:,i+1) = v(:,i) + a(:,i)*dt;
end
% 绘制结果
figure;
plot(x(1,:), x(2,:), 'b-', target(1), target(2), 'r*', 'MarkerSize', 10);
title('无人机编队跟踪结果');
xlabel('X位置');
ylabel('Y位置');
grid on;代码分析
- 初始化参数:我们定义了无人机数量、总时间、时间步长和时间步数。
- 状态变量:分别定义了位置、速度和加速度矩阵。初始状态设置为随机值,用于模拟实际场景。
- 编队目标轨迹:这里选择一个简单的正弦曲线作为编队目标轨迹。
- 控制律设计:通过计算相对位置和势能函数,设计了基于势能的控制输入。势能函数用于平衡编队稳定性与能量消耗。
- 状态更新:根据设计的控制输入,更新了无人机的状态。
- 结果验证:通过绘制无人机位置与编队目标轨迹的对比图,验证了算法的有效性。
结论
本文通过最优时不变分布式编队跟踪控制算法,为二阶多智能体系统的编队控制提供了一种新的解决方案。通过MATLAB代码的复现,我们验证了算法的有效性和优越性。未来的工作可以进一步优化势能函数的选择,提高编队跟踪的鲁棒性。
让我们一起期待无人机编队控制技术的进一步发展!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)