《从零搭建自主无人机》—1——Orange Pi 5 Max 概述和基本环境(ROS、VScode、Nomachine、PX4)搭建
==》相关链接:

官网链接:香橙派(Orange Pi)-Orange Pi官网-香橙派开发板,开源硬件,开源软件,开源芯片,电脑键盘![]() http://www.orangepi.cn/
http://www.orangepi.cn/
OrangePi 5 Max官方资料下载:OrangePi 5 Max![]() http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-support/Orange-Pi-5-Max.html
http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-support/Orange-Pi-5-Max.html
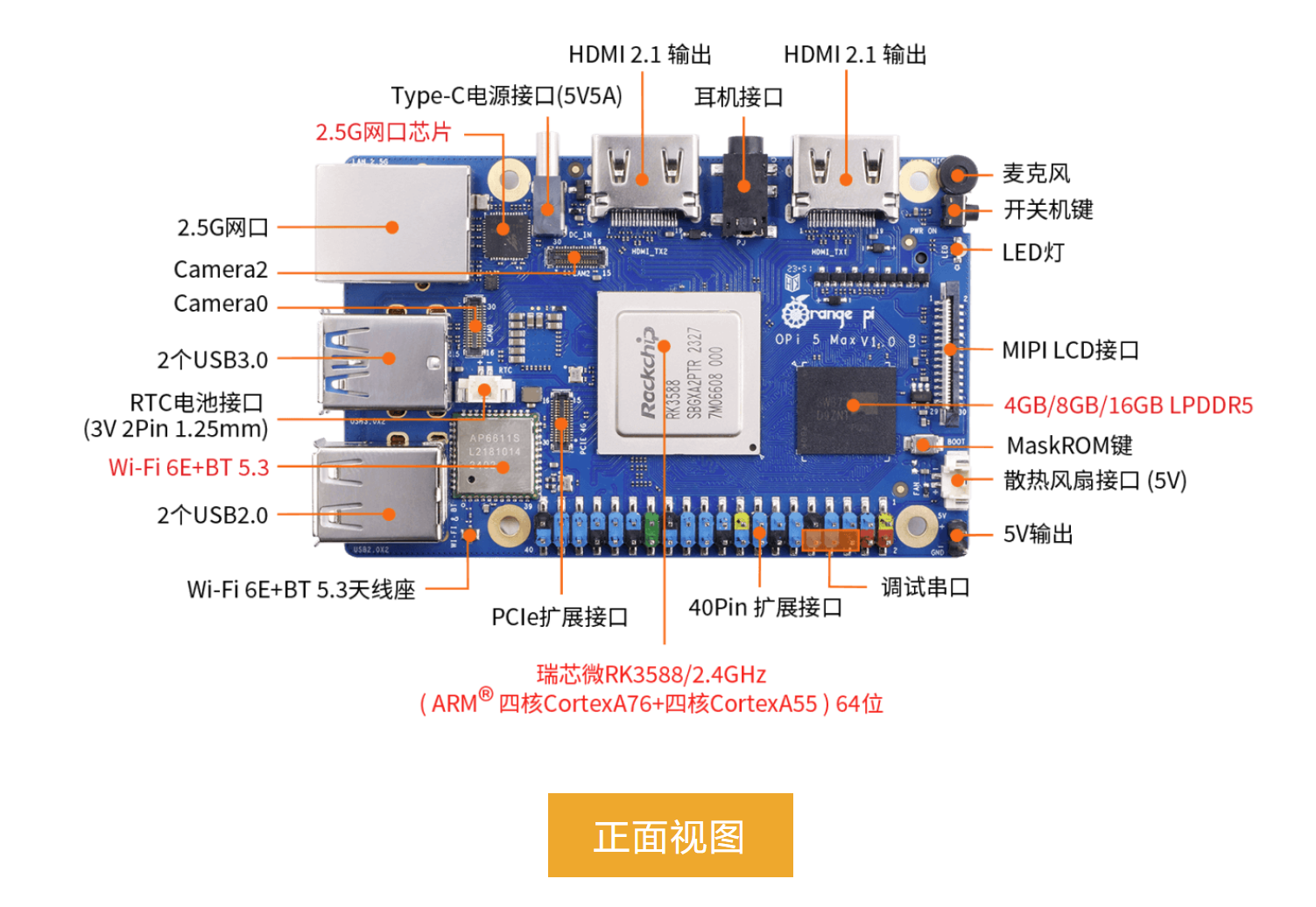
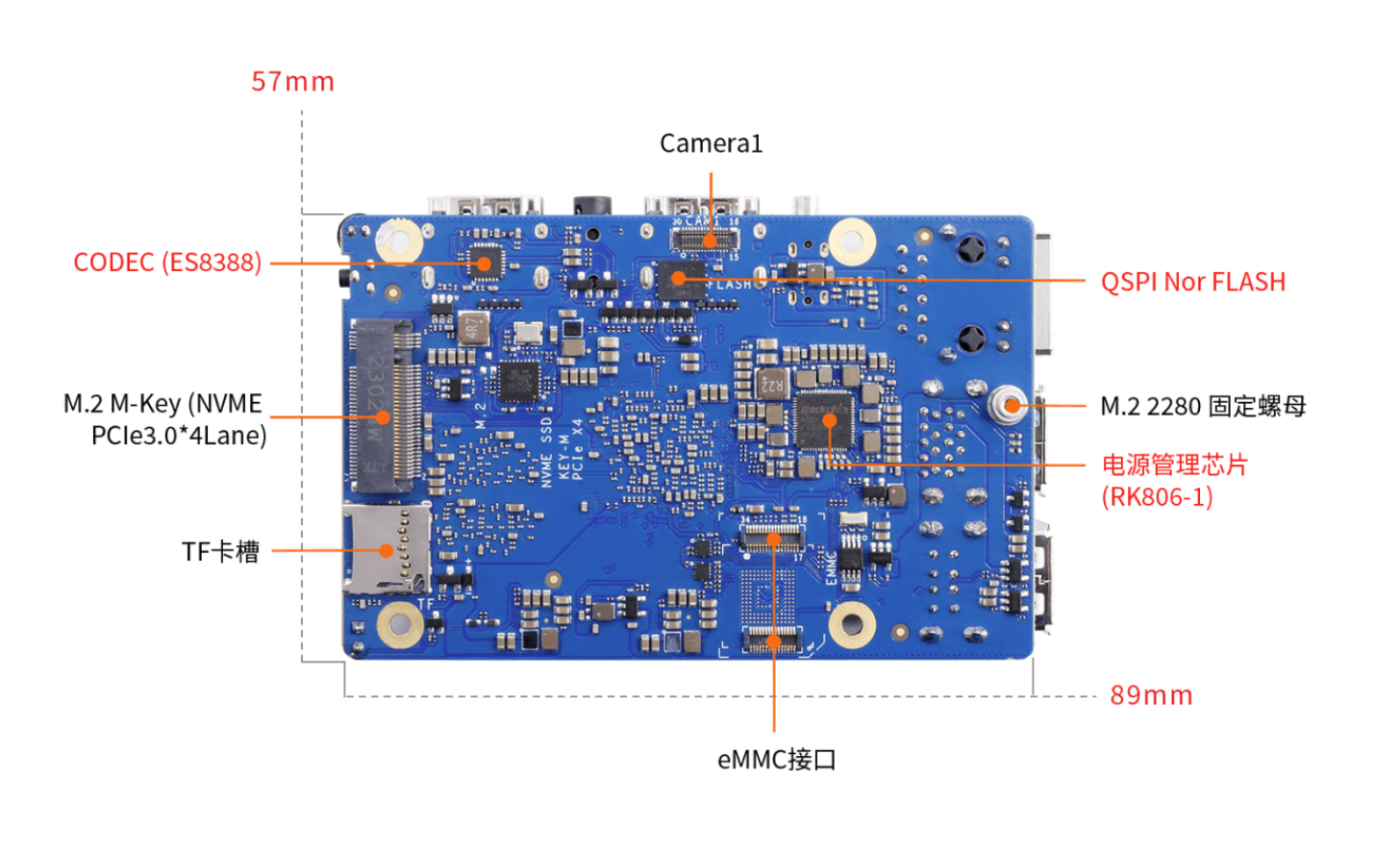
一、Orange Pi 5 Max 概述
Orange Pi 5 Max 采用了瑞芯微 RK3588 新一代八核 64 位 ARM 处理器,具体为 四核 A76 和四核 A55,采用的三星 8nm LP 制程工艺,大核主频最高可达 2.4GHz, 集成 ARM Mali-G610 MP4 GPU,内嵌高性能 3D 和 2D 图像加速模块,内置高达 6 Tops 算力的 AI 加速器 NPU,拥有 4GB/8GB/16GB(LPDDR5)内存,具有高达 8K 显示处理能力。Orange Pi 5 Max 引出了相当丰富的接口,包括 HDMI 输出、Wi-Fi6、M.2 M-key PCIe3.0x4、2.5G 网口、USB2.0、USB3.1 接口和 40pin 扩展排针等。可广泛适用于 高端平板、边缘计算、人工智能、云计算、AR/VR、智能安防、智能家居等领域, 覆盖 AIoT 各个行业。 Orange Pi 5 Max 支持 Orange Pi 官方研发的操作系统 Orange Pi OS,同时,支持 Android 13、Debian11、Debian12、Ubuntu20.04 和 Ubuntu22.04 等操作系统。(摘取自Orange Pi 5 Max 用户手册)
二、ubuntu镜像烧录
(一)首先准备好TF卡,和USB读卡器,在OrangePi 5 Max官方资料下载你所需的对应ubuntu镜像,我这里选择的是Orangepi5max_1.0.0_ubuntu_focal_desktop_xfce_linux5.10.160,解压镜像文件后,通过balenaEtcher烧录软件进行烧录即可。
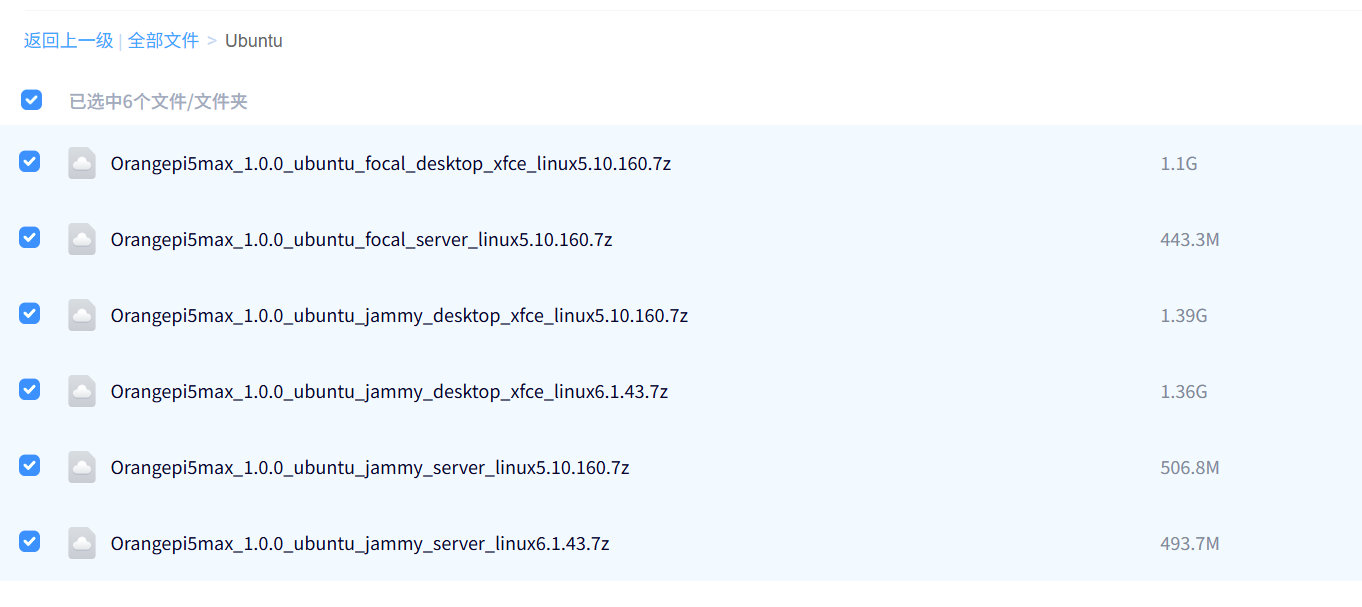
官方提供的各个版本的ubuntu镜像,包括desktop和server版本
balenaEtcher烧录软件界面
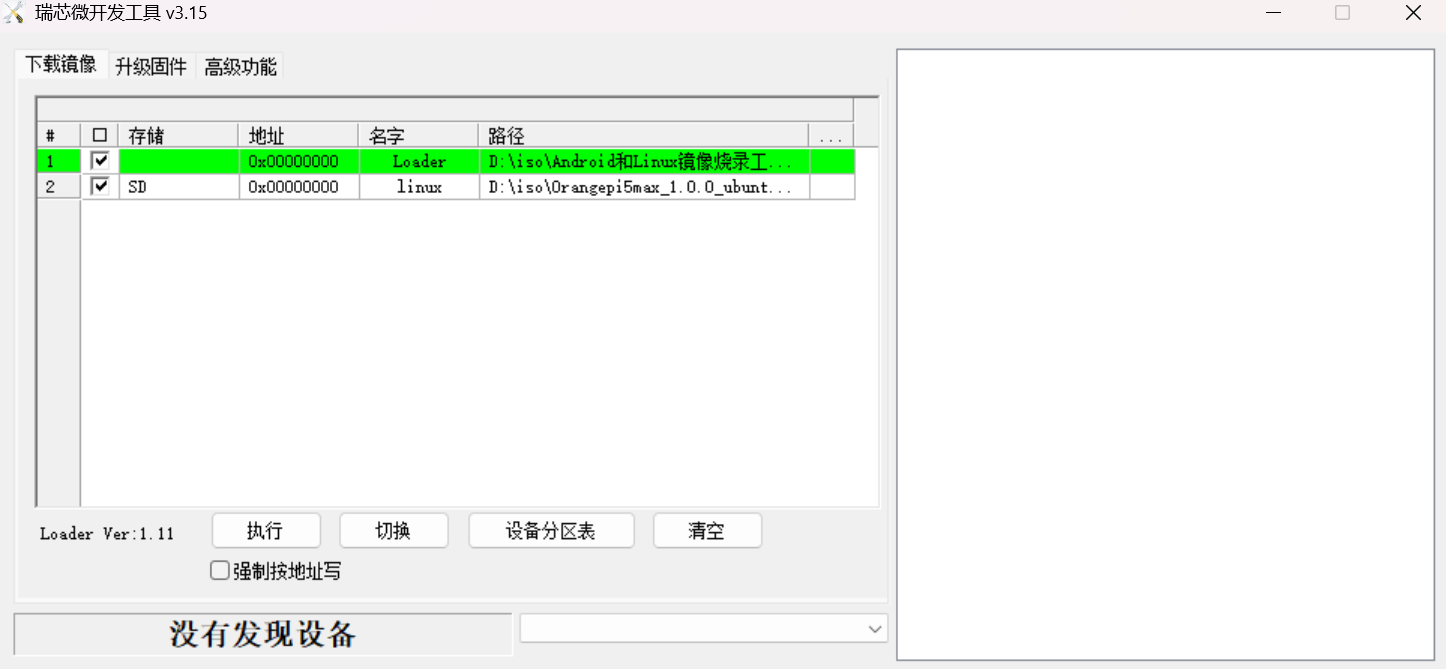
(二)因为主包使用balenaEtcher一直出问题进不了桌面,多方求助无果,只能更换烧录方式,使用rk工具进行烧录,最后烧录成功了,参考(2.3.2. 使用 RKDevTool 烧录 Linux 镜像到 TF 卡中的方法)
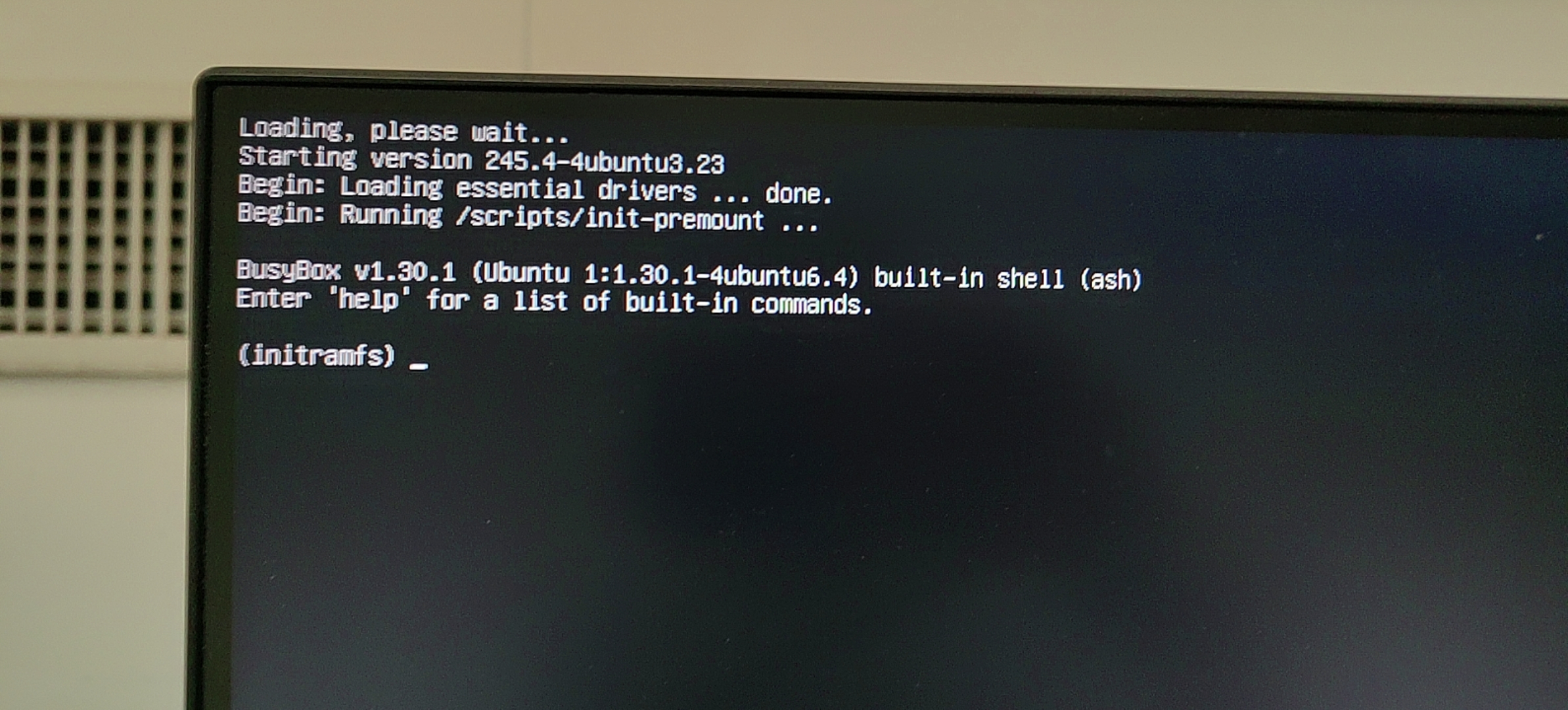
烧录完TF卡插入主板,开机后进入不了系统,按照说明书使用RK工具烧录。

成功进入到桌面的样子。
三、桌面基本配置和安装ROS环境
(一)系统基本配置
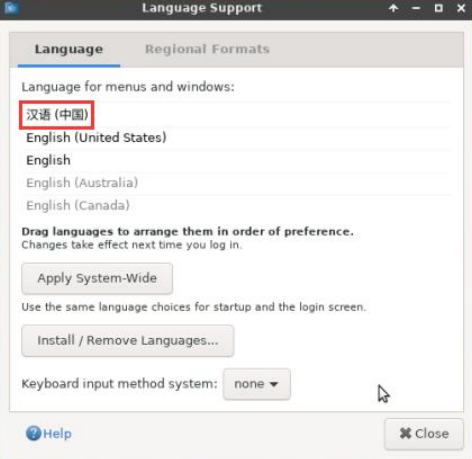
1、配置中文:首先打开 Language Support,然后找到汉语(中国)选项,
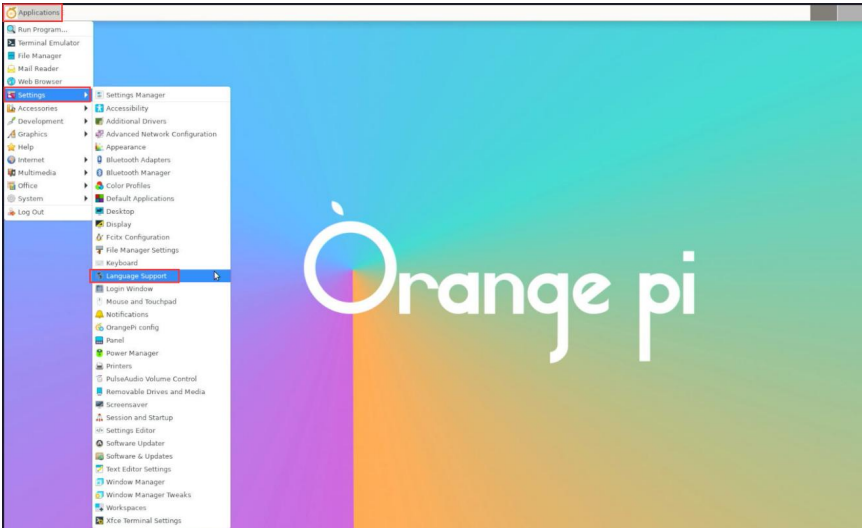
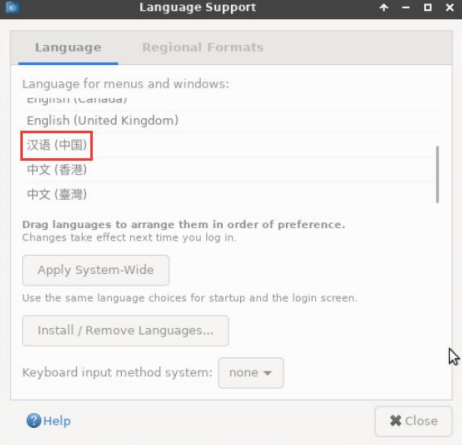
再使用鼠标左键选中汉语(中国)并按住不动,然后往上将其拖到最开始的 位置,拖完后的显示如下图所示:
然后选择 Apply System-Wide 将中文设置应用到整个系统,设置 Keyboard input method system 为 fcitx。
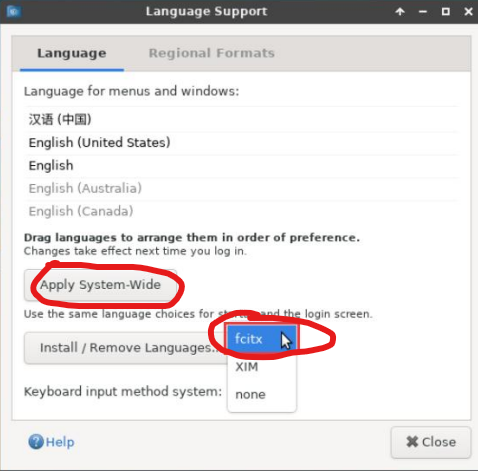
然后重启 Linux 系统使配置生效即可,输入法可以通过 Ctrl+Space 快捷键来切换成中文输入法。
(二)在ubuntu20.04上安装ROS1
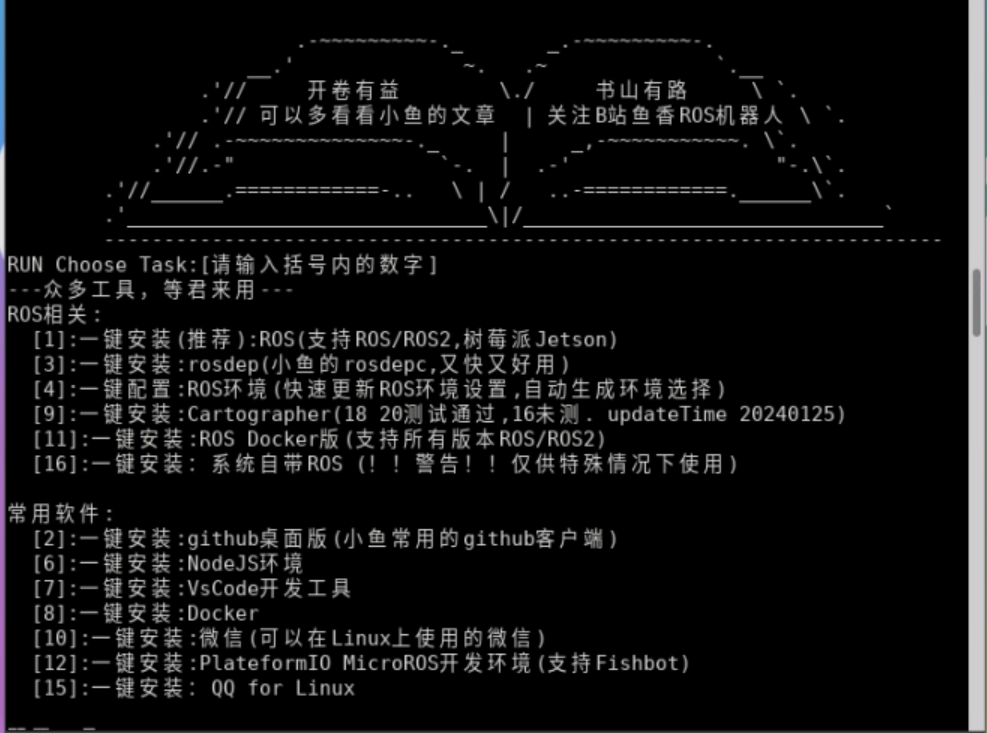
这里直接使用鱼香肉丝快捷安装:
wget http://fishros.com/install -O fishros && . fishros详细步骤参考链接:

安装成功了。
(三)相关软件安装
1、安装Terminator终端软件
在终端输入安装:
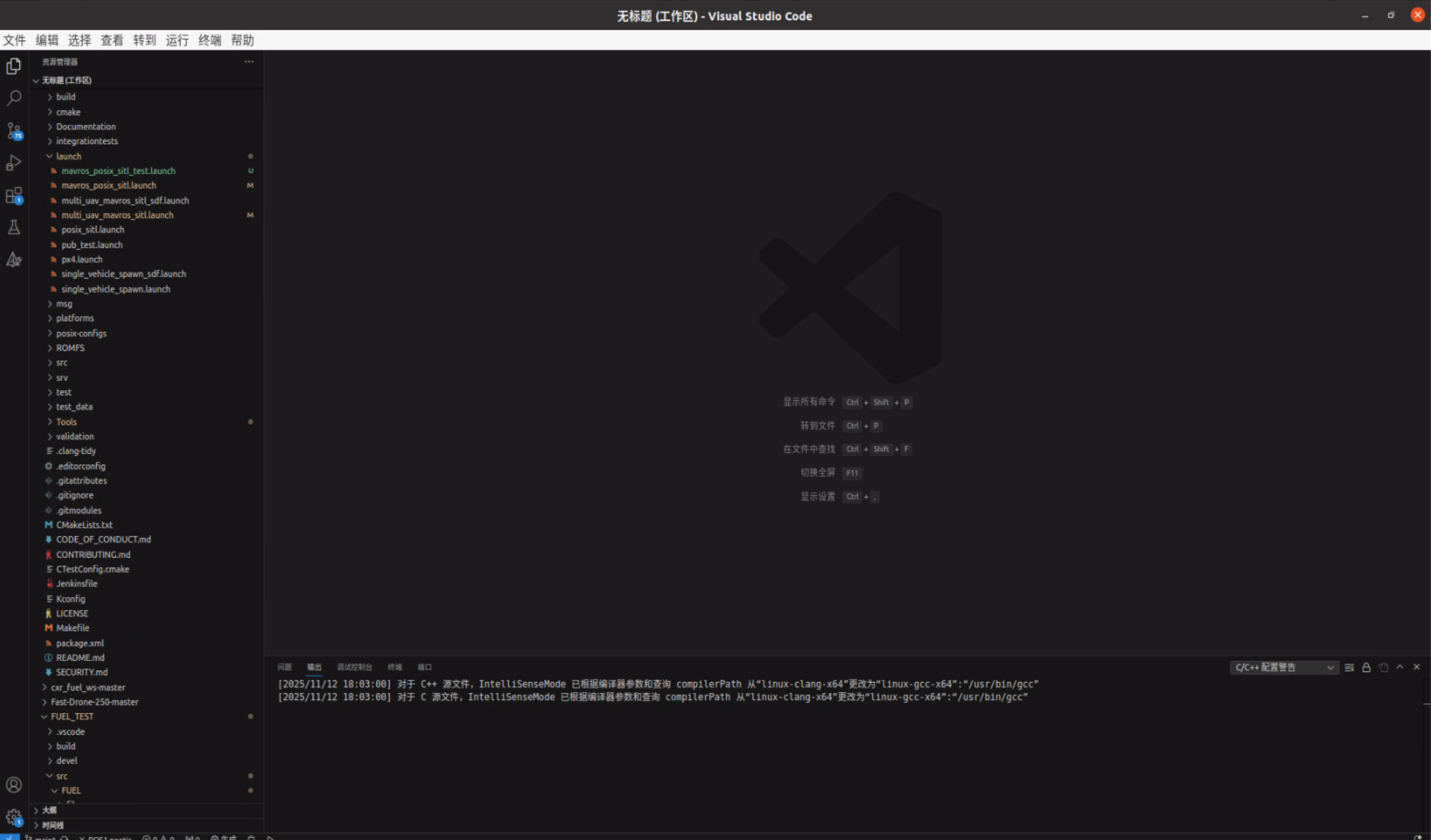
sudo apt install terminator2、安装VScode
Visual Studio Code(简称 VS Code)是微软在2015年推出的一款免费、开源的跨平台源代码编辑器。它支持Windows、macOS和Linux操作系统,被广泛应用于现代Web和云应用的开发中。VS Code以其轻量级、高性能和丰富的功能集而受到开发者的青睐。==》是一个非常强大的编译器,推荐使用。
VScode使用文档:Visual Studio Code 文档![]() https://code.visualstudio.com/docs?start=true
https://code.visualstudio.com/docs?start=true
VScode官网下载链接:
Download Visual Studio Code - Mac, Linux, Windows![]() https://code.visualstudio.com/download这里需要下载arm64的deb安装包,下载好之后,下面两种安装方式:
https://code.visualstudio.com/download这里需要下载arm64的deb安装包,下载好之后,下面两种安装方式:
方式1:双击安装即可(或右击选择安装)
方式2:
sudo dpkg -i xxxx.deb卸载:
sudo dpkg --purge code使用 VScode 开发 ROS 程序,需要先安装一些插件,目前常用插件如下:

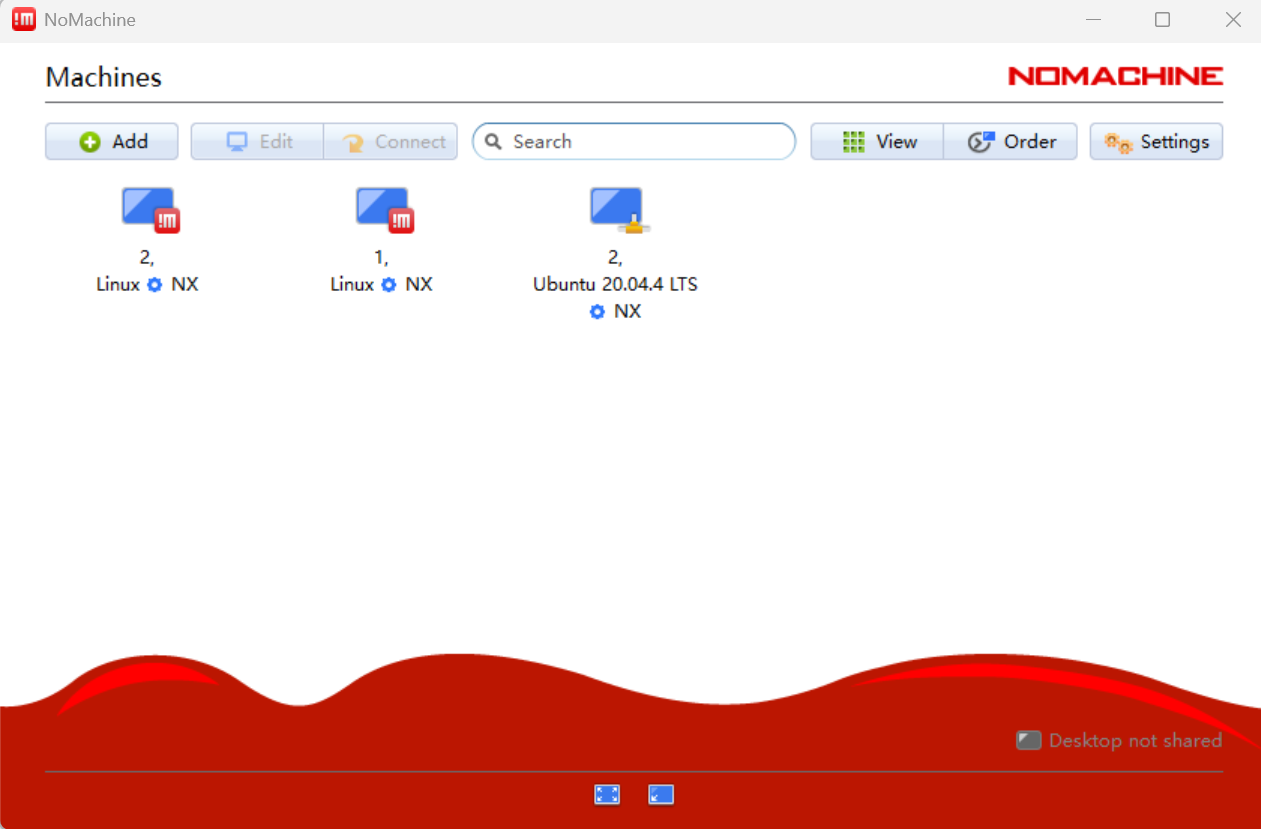
3、安装nomachine远程操控软件
这里介绍一下ARM架构版本和处理器版本:ARM架构版本及处理器系列详细介绍_MasterHu88的博客-CSDN博客_描述arm处理器系列、指令集架构情况
官网下载对应网页,:
Downloads – Download![]() https://download.nomachine.com/download/?id=30&platform=linux&distro=arm
https://download.nomachine.com/download/?id=30&platform=linux&distro=arm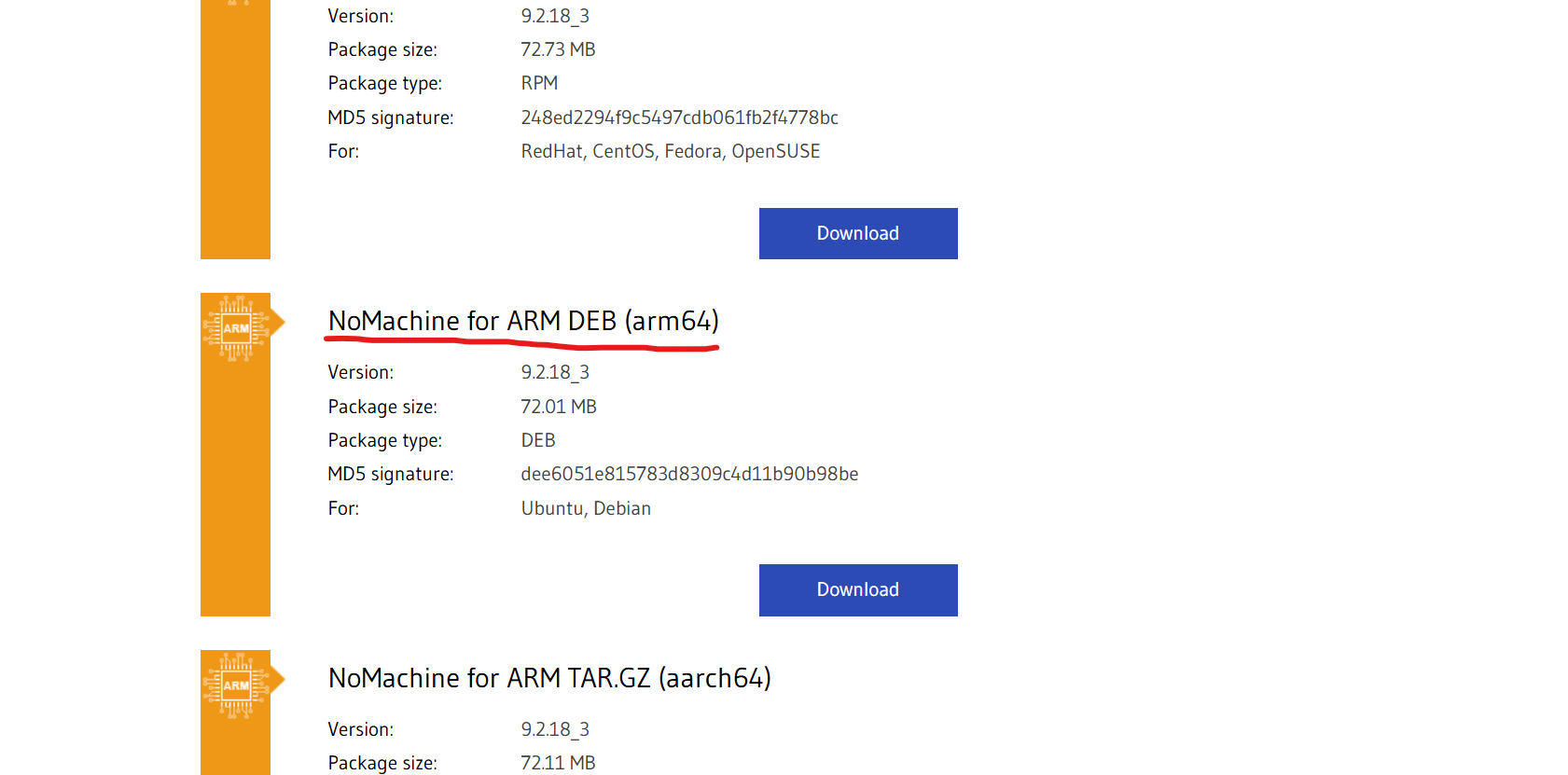
下载这个版本即可
安装解压运行:
$ sudo dpkg -i xxxx.deb(四)PX4仿真环境配置
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
下载完后,继续下载未下完的组件
cd PX4-Autopilot/
git submodule update --init --recursive
2、然后执行脚本
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
中间报错的话执行下面命令:
python3 -m pip install --upgrade pip
python3 -m pip install --upgrade Pillow
如果过程中有安装失败的地方,再输入命令:
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh --fix-missing
要是过程中报错,运行下面命令:
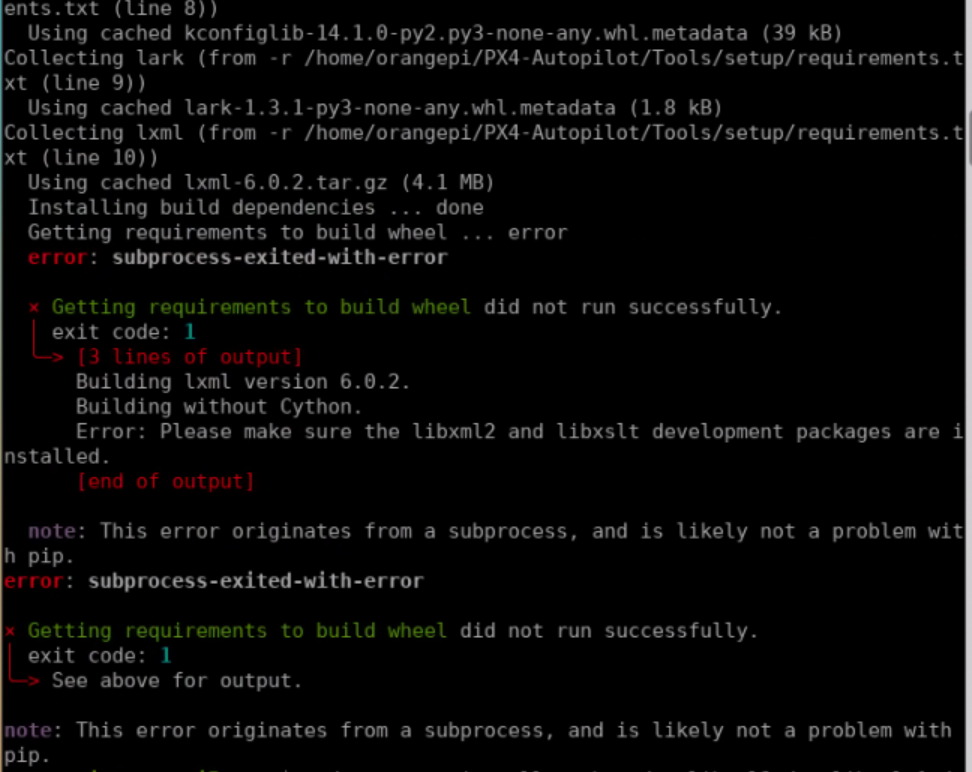
直接执行下面命令就好
sudo apt-get install python-dev libxml2-dev libxslt1-dev zlib1g-dev3、编译
cd PX4-Autopilot/
make px4_sitl_default gazebo
成功编译完后是这个样子的:
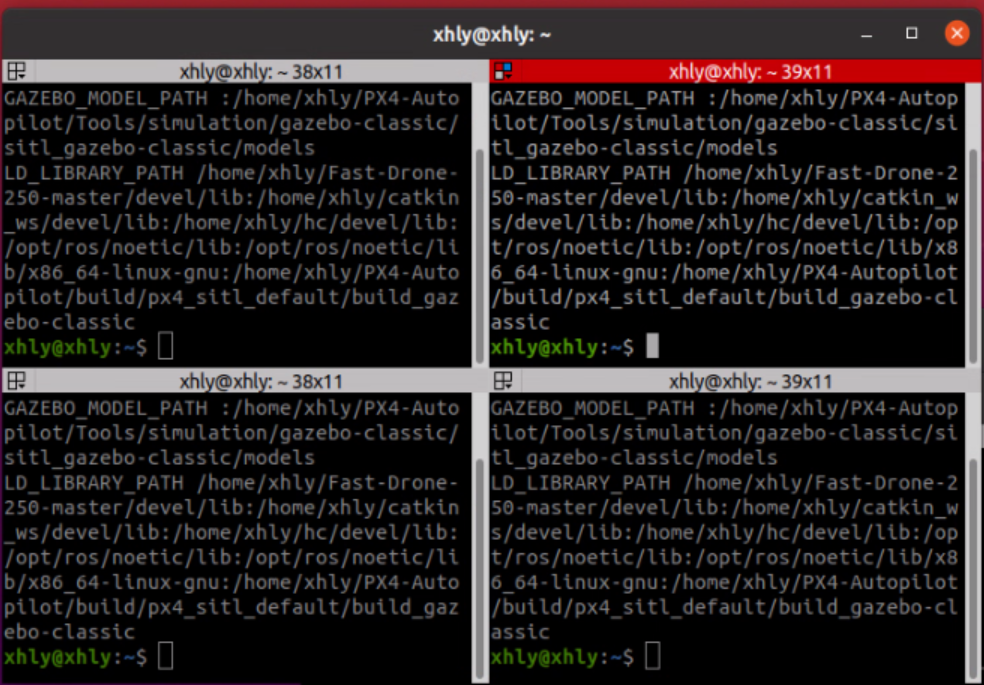
4、添加环境变量bashrc
source ~/PX4-Autopilot/Tools/simulation/gazebo-classic/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic
5、安装mavros
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras
安装完成,在进行命令测试:
roslaunch mavros px4.launch
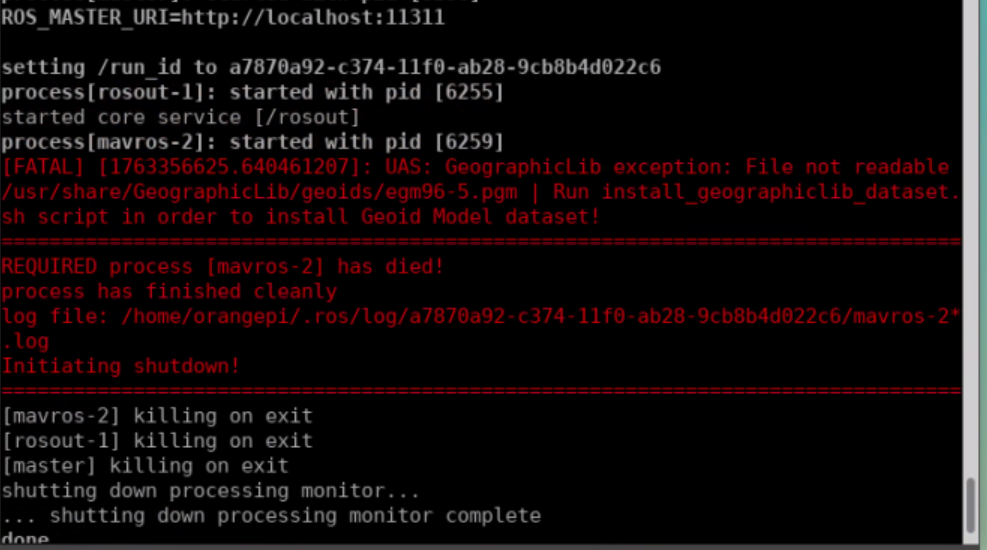
遇到这个问题,执行下面命令:
sudo /opt/ros/noetic/lib/mavros/install_geographiclib_datasets.sh

这样就可以了。
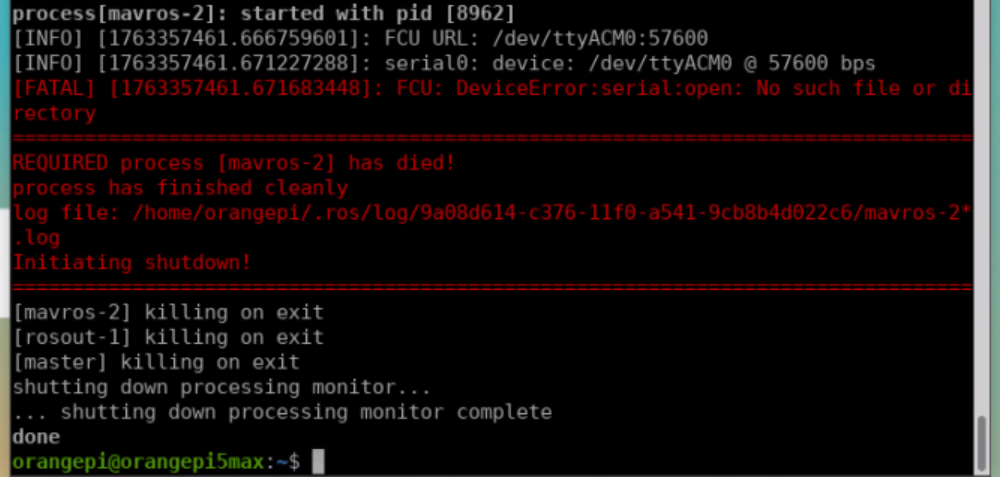
再执行上一步命令出现这个情况是正常的,因为没有连接飞控硬件,接上硬件就好。
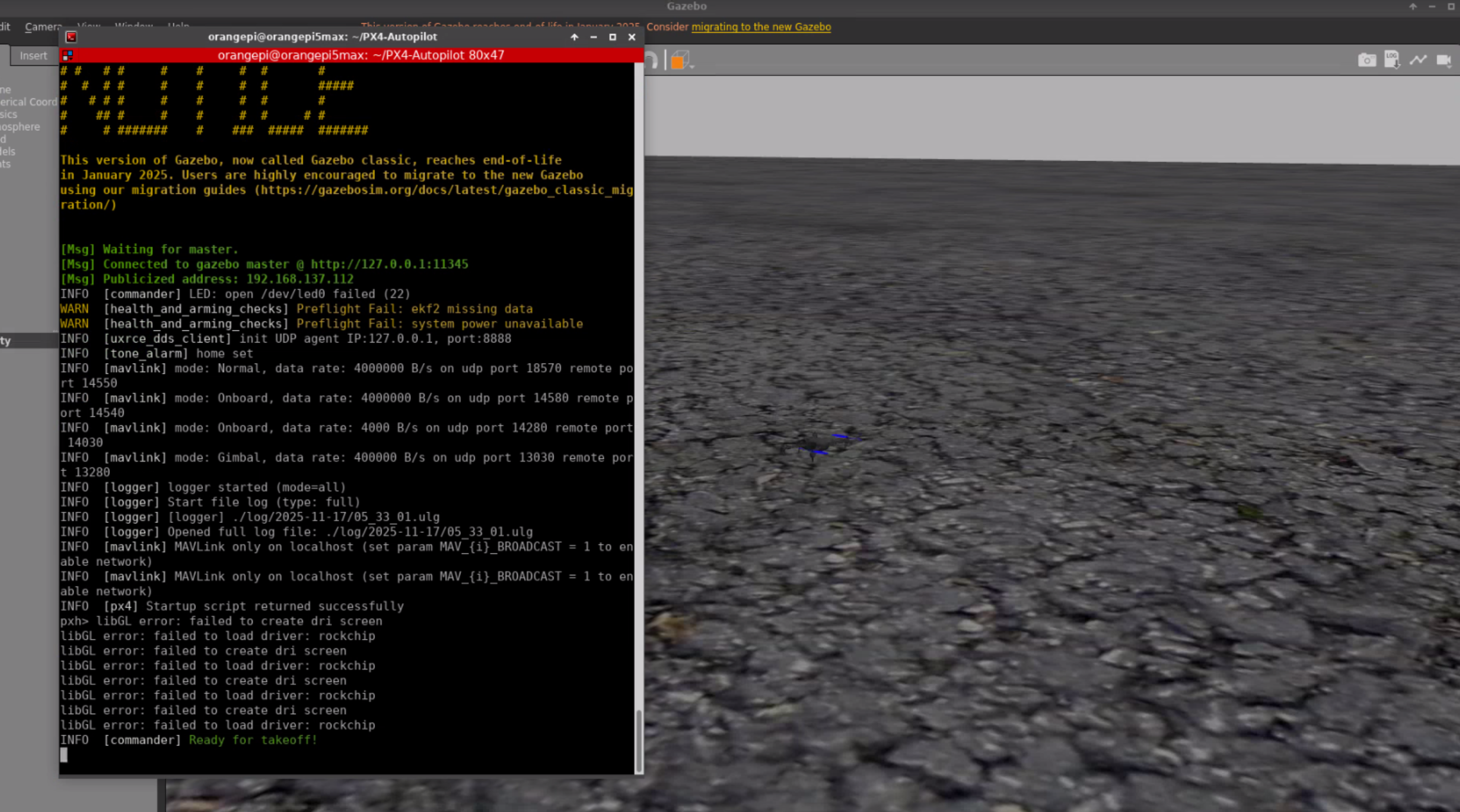
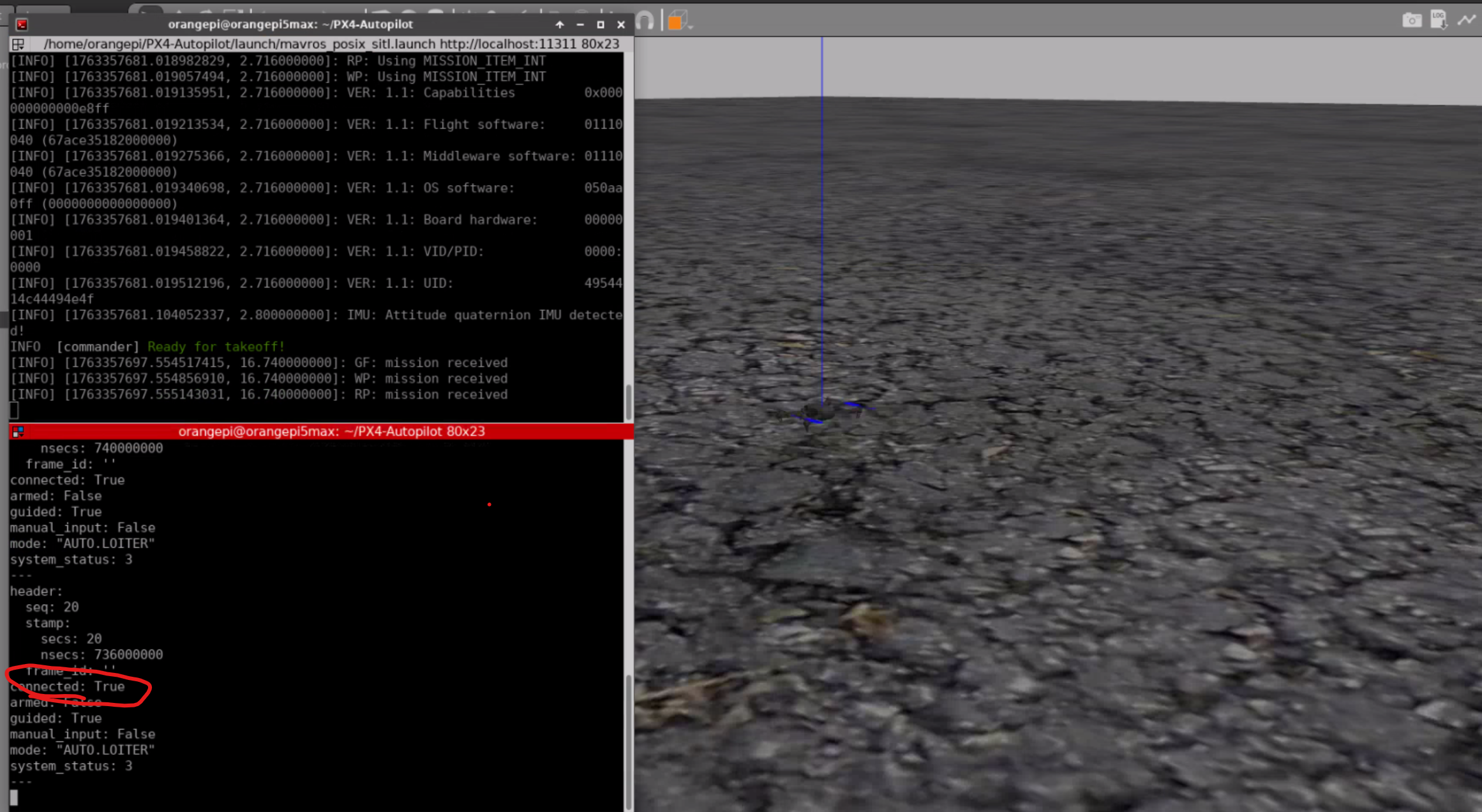
6、测试PX4仿真与mavros连接情况
分别输入仿真指令和话题指令查看,显示为connected: True就OK了:
roslaunch px4 mavros_posix_sitl.launch
rostopic echo /mavros/state
7、安装QGC地面站
因为Orange Pi 5 Max是arm架构,目前官网提供的支持主要是针对x86架构下的qgc安装,安装会出现下面问题(无法执行二进制文件),所以需要通过flatpak途径去下载arm版qgc。参考:如何安装arm版本的qgc? QGroundControl_arm架构下如何下载qgc-CSDN博客![]() https://blog.csdn.net/weixin_44408364/article/details/134766626?spm=1001.2014.3001.5506
https://blog.csdn.net/weixin_44408364/article/details/134766626?spm=1001.2014.3001.5506
所以需要进行如下步骤,首先安装flatpak:
sudo add-apt-repository ppa:alexlarsson/flatpak
sudo apt update
sudo apt install flatpak
下载指定版本的aarch64,必须为5.15-21.08,然后下载org.mavlink.qgroundcontrol
flatpak remote-add --if-not-exists flathub https://flathub.org/repo/flathub.flatpakrepo
flatpak install flathub org.kde.Platform/aarch64/5.15-21.08
flatpak remote-add --if-not-exists thopiekar.eu https://dl.thopiekar.eu/flatpak/_.flatpakrepo
flatpak install thopiekar.eu org.mavlink.qgroundcontrol
最后重启电脑,再终端运行下面代码或双击程序图标。
flatpak run org.mavlink.qgroundcontrol最终成功启动QGC:


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 28
28 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)